【matlab】机器人工具箱快速上手-动力学仿真(代码直接复制可用)
动力学代码,按需修改参数
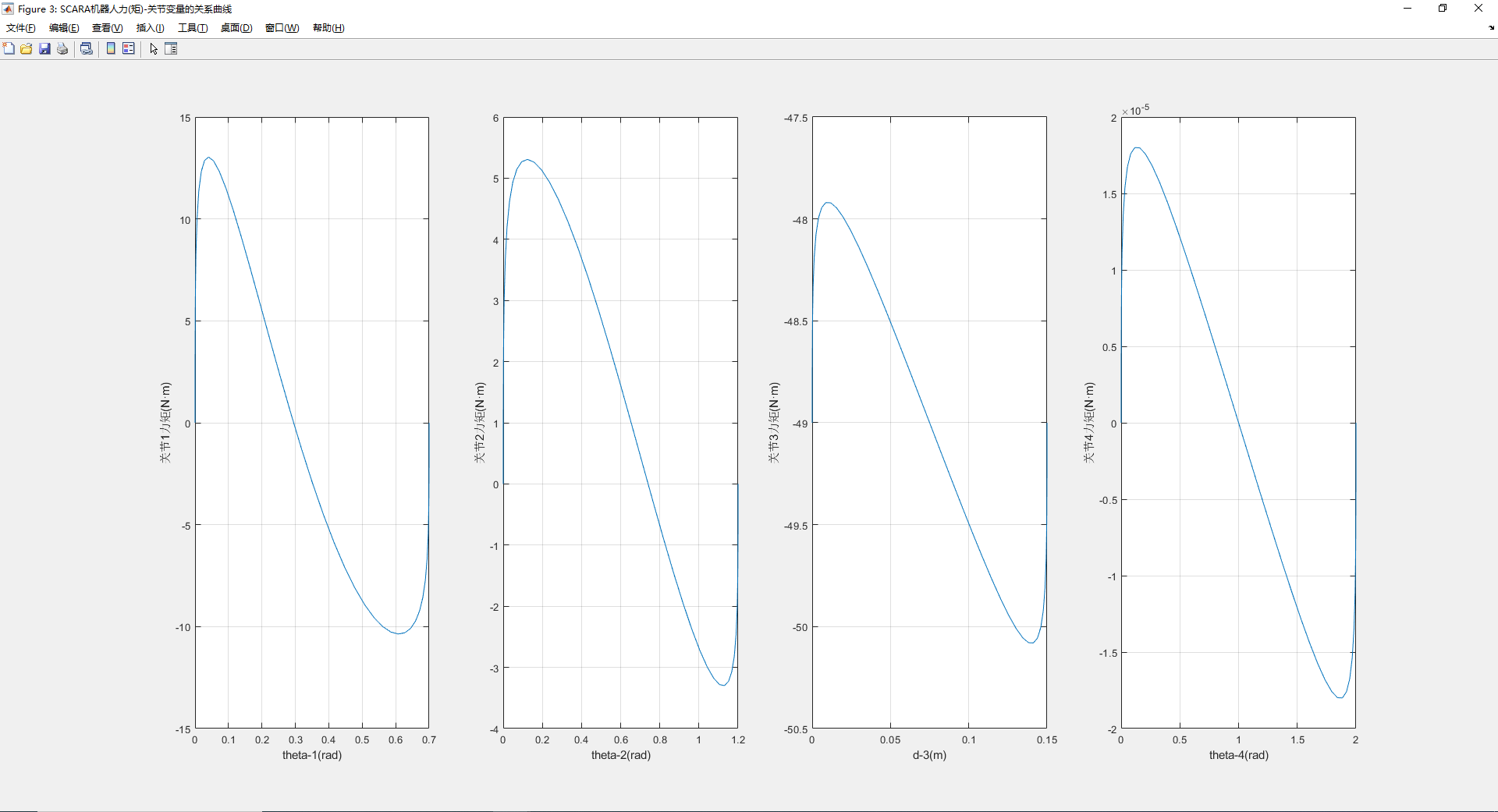
各关节力矩-关节变量的关系曲线:
%%%%%%%%SCARA机器人仿真模型
l=[0.457 0.325];
L(1)= Link('d',0,'a',l(1),'alpha',0,'standard','qlim',[-130 130]*pi/180);%连杆1
L(2)=Link('d',0,'a',l(2),'alpha',pi,'standard','qlim',[-145 145]*pi/180);%连杆2
L(3)=Link('theta',0,'a',0,'alpha',0,'standard','qlim',[0 0.3]);%连杆3
L(4)= Link('d',0,'a',0,'alpha',0,'standard','qlim',[-360 360]*pi/180);%连杆4
scara=SerialLink(L,'name','SCARA Robot');%建立 SCARA 机器人模型
q0=[0 0 0 0];%初始关节变量
scara.plot(q0);%绘制机器人结构
scara.teach(q0);%驱动机器人%%%%%%%%工作空间绘制
qL=scara.qlim;%关节运动范围
N=10000;%随机数数量
ws_q=zeros(N,4);%定义N个关节变量向量组成的关节变量矩阵q
a=rand(size(ws_q)); %生成元素数值在0~1之间的与q同维度的随机矩阵for j=1:Nfor i=1:4ws_q(j,i)=qL(i,1)+(qL(i,2)-qL(i,1))*a(j,i);%给矩阵q赋q范围内的随机值,以得到足够多的给定范围(矩阵ql)内的机器人的关节变量(矩阵q)值end
end
%求机器人位置坐标
ws_x=l(1)*cos(ws_q(:,1))+l(2)*cos(ws_q(:,1)+ ws_q(:,2));%机器人末端x坐标值
ws_y=l(1)*sin(ws_q(:,1))+l(2)*sin(ws_q(:,1)+ws_q(:,2));%机器人末端了坐标值
ws_z=- ws_q(:,3);%机器人末端z坐标值
figure('Name','Scara机器人工作空间')
plot3(ws_x,ws_y,ws_z,'r.')
grid;
xlabel('x');
ylabel('y');
zlabel('z');
%%%%%%%%轨迹规划
qA=[0 0 0 0];%起始点关节变量值
qB=[0.7 1.2 0.15 2];%终止点关节变量值
t=0:0.05:2;%产生时间向量
[q,qd,qdd]=jtraj(qA,qB,t);%jtraj()为构建轨迹命令,得到各关节的位移、速度和加速度
%%%%%%%%求解关节驱动力矩矢量M(t)
m1=15;m2=10;m3=2.5;m4=2.5;%连杆质量
l1=0.475;l2=0.325;r0=0.01; %连杆参数
g=9.8;%重力加速度[m/s^2]
for i=1:length(t)D11=(m1*l1^2)/3+m2*((l1^2)/3+l2^2+l1*l2*cos(q(i,2)))+(m3+m4)*(l1^2+l2^2+2*l1*l2*cos(q(i,2)))+(m4*r0^2)/2;D22=(m2*l2^2)/3+m3*l2^2+m4*l2^2+(m4*r0^2)/2;D33=m3+m4;D44=(m4*r0^2)/2;D12=(m2*l2^2)/3+(m2*l2*cos(q(i,2)))/2+m3*l2^2+m3*l1*l2*cos(q(i,2))+m4*l2^2+m4*l1*l2*cos(q(i,2))+(m4*r0^2)/2;D13=0; D14=-(m4*r0^2)/2;D21=D12;D23=0;D24=-(m4*r0^2)/2;D31=D13;D32=D23;D34=0;D41=D14;D42=D24;D43=D34;D112=-(m2/2+m3+m4)*l1*l2*sin(q(i,2));D121=D112;D122=-(m2/2+m3+m4)*l1*l2*cos(q(i,2));D211=-D122;tau(:,i)=[D11 D12 D13 D14;D21 D22 D23 D24;D31 D32 D33 D34;D41 D42 D43 D44]*qdd(i,:)'+[2*D112*qd(i,1)*qd(i,2)+D122*qd(i,2)^2;D211*qd(i,2)^2; -(m3+m4)*g;0];
end
figure('Name','SCARA机器人力(矩)-关节变量的关系曲线');
subplot(1,4,1);
plot(q(:,1),tau(1,:));
grid on
xlabel('theta-1(rad)');
ylabel('关节1力矩(N·m)');
subplot(1,4,2);
plot(q(:,2),tau(2,:));
grid on
xlabel('theta-2(rad)');
ylabel('关节2力矩(N·m)');
subplot(1,4,3);
plot(q(:,3),tau(3,:));
grid on
xlabel('d-3(m)');
ylabel('关节3力矩(N·m)');
subplot(1,4,4);
plot(q(:,4),tau(4,:));
grid on
xlabel('theta-4(rad)');
ylabel('关节4力矩(N·m)');
相关文章:
【matlab】机器人工具箱快速上手-动力学仿真(代码直接复制可用)
动力学代码,按需修改参数 各关节力矩-关节变量的关系曲线: %%%%%%%%SCARA机器人仿真模型 l[0.457 0.325]; L(1) Link(d,0,a,l(1),alpha,0,standard,qlim,[-130 130]*pi/180);%连杆1 L(2)Link(d,0,a,l(2),alpha,pi,standard,qlim,[-145 145]*pi/180);%连…...
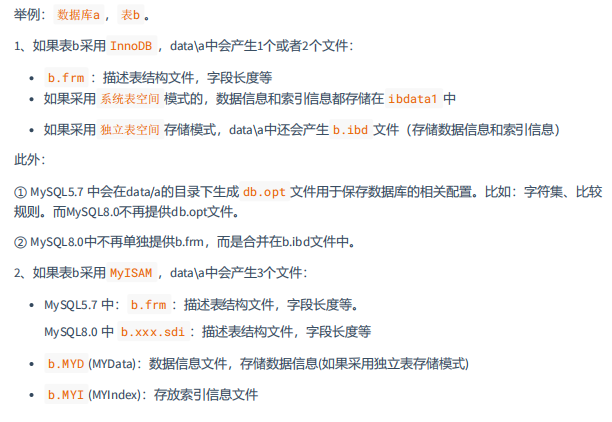
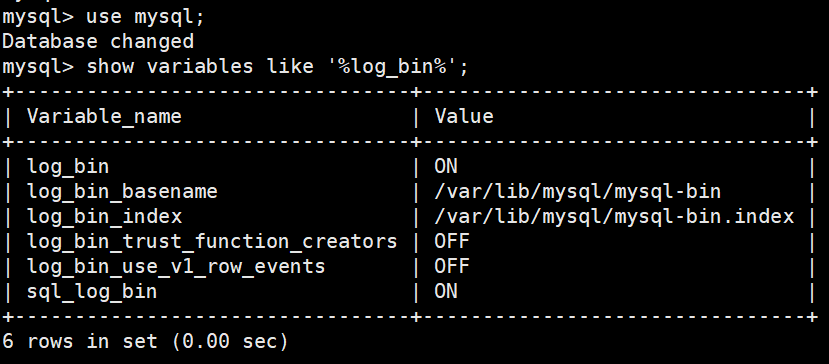
MySQL高级篇第2章(MySQL的数据目录)
文章目录 1、MySQL8的主要目录结构1.1 数据库文件的存放路径1.2 相关命令目录1.3 配置文件目录 2、数据库和文件系统的关系2.1 查看默认数据库2.2 数据库在文件系统中的表示2.3 表在文件系统中的表示2.3.1 InnoDB存储引擎模式2.3.2 MyISAM存储引擎模式 2.4 小结 1、MySQL8的主要…...

【通过改变压缩视频的分辨率实现高效的视频语义分割】CVPR2022论文精度
Efficient Semantic Segmentation by Altering Resolutions for Compressed Videos Efficient Semantic Segmentation by Altering Resolutions for Compressed VideosBasic Information:论文简要 :背景信息:a. 理论背景:b. 技术路线: 结果:a. 详细的实验设置:b. 详细的实验结果…...

golang 时间工具类
用不习惯也嫌麻烦每次都去操作时间,然后就自己写了个时间工具类 package timeutilimport ("time" )func New() *TimeUtil {return &TimeUtil{} }// TimeUtil 是时间操作工具类 type TimeUtil struct{}// GetFormattedDate 获取格式化的日期字符串 fun…...

剑指 Offer 44.!! 数字序列中某一位的数字
参考资料 剑指 Offer 44. 数字序列中某一位的数字 中等 351 相关企业 数字以0123456789101112131415…的格式序列化到一个字符序列中。在这个序列中,第5位(从下标0开始计数)是5,第13位是1,第19位是4,等等。…...
16K个大语言模型的进化树;81个在线可玩的AI游戏;AI提示工程的终极指南;音频Transformers课程 | ShowMeAI日报
👀日报&周刊合集 | 🎡生产力工具与行业应用大全 | 🧡 点赞关注评论拜托啦! 🤖 LLM 进化树升级版!清晰展示 15821 个大语言模型的关系 这张进化图来自于论文 「On the Origin of LLMs: An Evolutionary …...

Docker Compose 容器编排 + Docker--harbor私有仓库部署与管理
目录 一、Docker Compose简介 1、Docker Compose 的YAML 文件格式及编写注意事项 2、Docker compose 使用的三个步骤 3、 Docker Compose配置常用字段 4、 Docker Compose 常用命令 5、 Docker Compose 文件结构 二: Docker Compose 安装 1、Docker Compose…...
)
九五从零开始的运维之路(其二十六)
文章目录 前言一、概述1.什么是数据库2.数据库能干什么(一)企业应用(二)金融行业(三)电子商务(四)社交媒体(五)物联网 3.为什么要用数据库,优势、…...
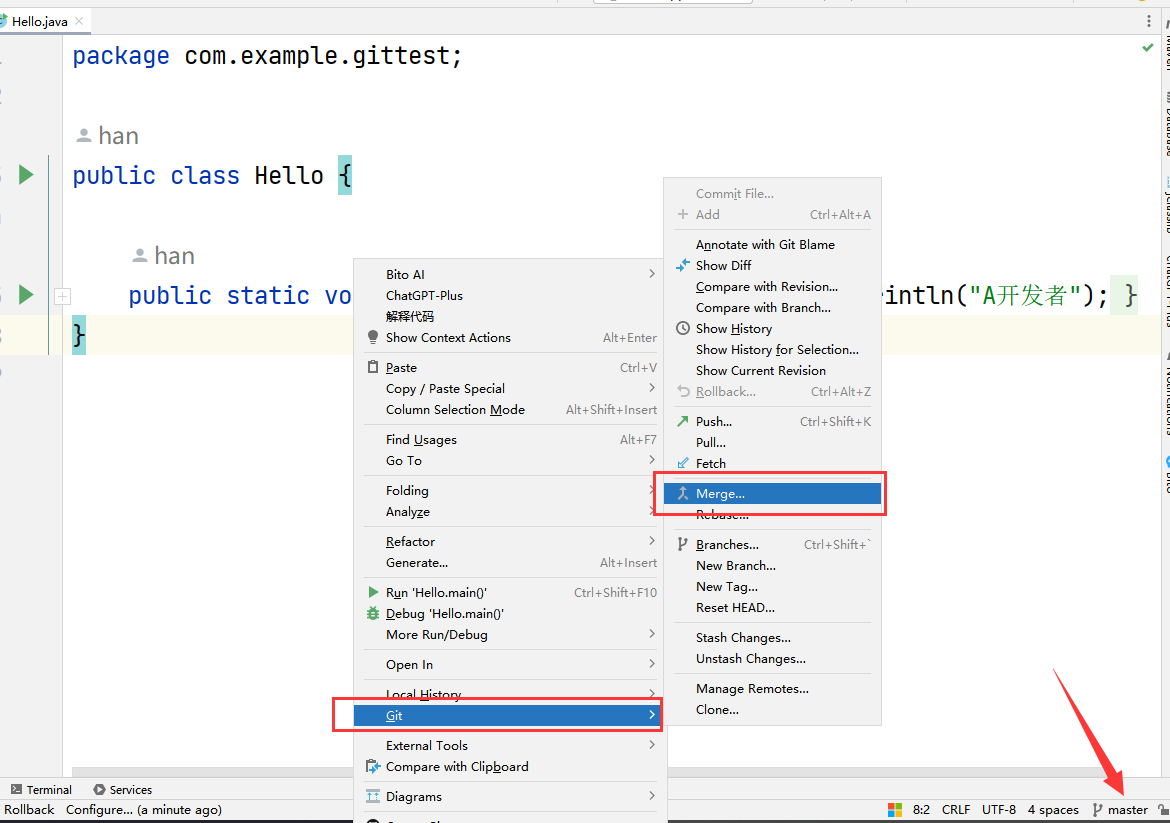
29.Git版本控制工具
1.Git简介 Git是一开源的分布式版本控制系统,提供了存储代码、管理版本历史、分支和合并等功能。 版本控制是指对软件开发过程中各种程序代码、配置文件及说明文档等文件变更的管理,是软件配置管理的核心思想之一。它的主要目的是跟踪和记录软件开发过程…...

【算法题】2790. 长度递增组的最大数目
题目: 给你一个下标从 0 开始、长度为 n 的数组 usageLimits 。 你的任务是使用从 0 到 n - 1 的数字创建若干组,并确保每个数字 i 在 所有组 中使用的次数总共不超过 usageLimits[i] 次。此外,还必须满足以下条件: 每个组必须…...

Qt设置开机自启动无法读取配置文件
问题: Qt5.9.4再注册表中加入开机自启动后,每次开机可以启动,但是无法读取配置文件 解决方案 再main()方法中加入QDir::setCurrent(QCoreApplication::applicationDirPath());即可。 static void AutoRunWithSystem(bool bAutoRun) {// 获取…...
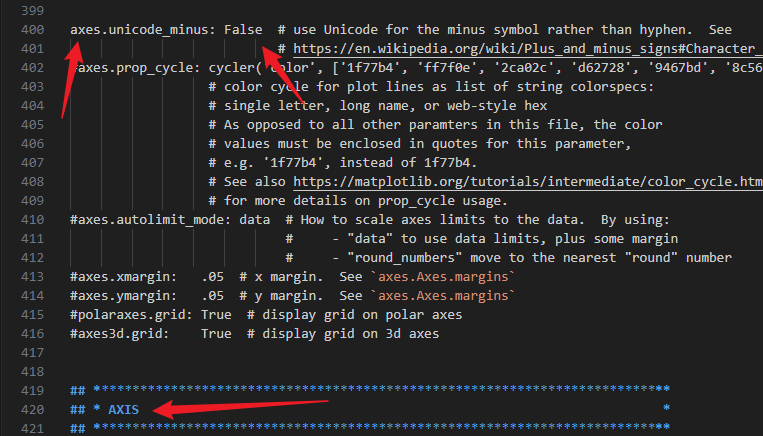
解决Font family [‘sans-serif’] not found问题
序言 以下测试环境都是在 anaconda3 虚拟环境下执行。 激活虚拟环境 conda activate test_python_env 或 source activate test_python_env工具: WinSCP Visual Studio Code 这里笔者使用 WinSCP 工具连接,编辑工具是 Visual Studio Code 一、字体…...

C语言进阶-2
1、多文件C语言项目 1.1、简单的C语言程序(项目) 只有一个C文件(a.c),编译的时候gcc a.c -o a,执行的时候./a 1.2、复杂的C语言程序(项目) 是由多个C文件构成的。例如一个项目中包含2个c文件(…...
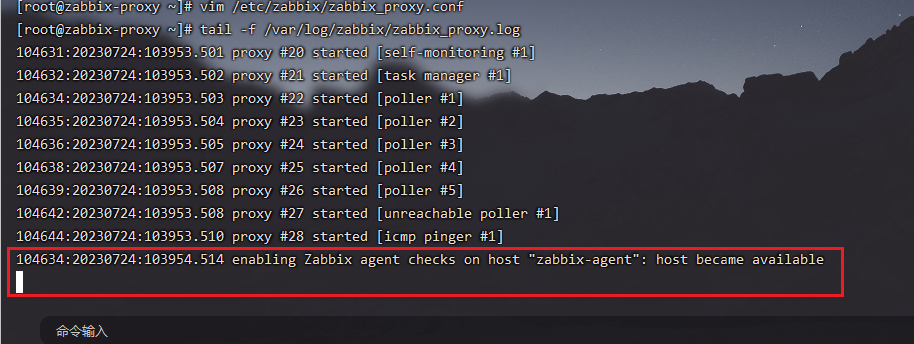
Zabbix监控之分布式部署
文章目录 Zabbix监控之分布式部署zabbix proxy概述部署zabbix-proxy节点规划基础环境准备安装proxy以及数据库配置数据库添加服务端host解析修改zabbix-proxy配置文件启动代理服务器 zabbix页面(1)在zabbix页面添加代理(2)zabbix-agent连接proxy Zabbix监控之分布式部署 zabbi…...
)
vue2企业级项目(七)
vue2企业级项目(七) 组件封装 src目录下创建components/index.js const components require.context("./modules", true, /index\.js$/);export default {install: (Vue) > {components.keys().forEach((key) > {let component compo…...
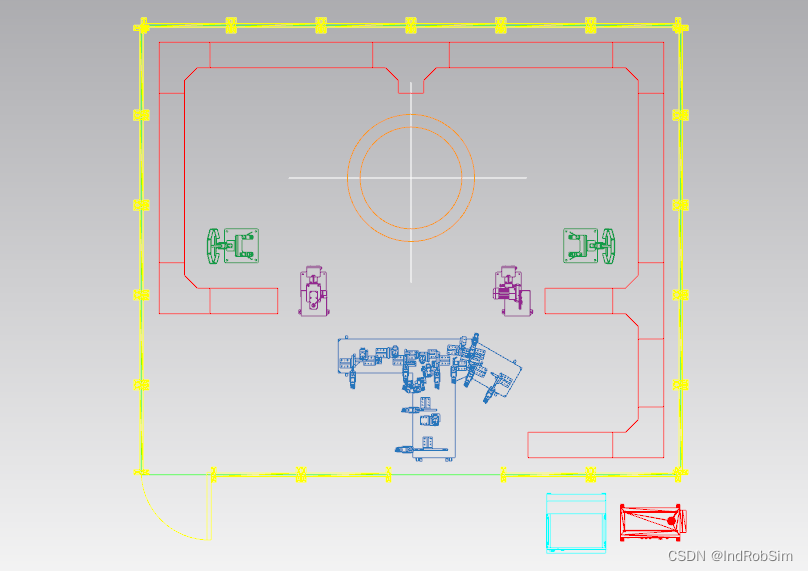
PDPS教程:导出带颜色的JT格式2D布局图文件的另一种方法
目录 概述 布局图平面化与边缘化处理 导出为JT格式文件 JT格式文件查看 概述 在PDPS软件中导入机器人生产线或工作站2D布局图之前,要先将布局图文件转换为JT格式。 使用Crossmanager软件转换出来的2D布局图文件会将图形元素原有的颜色自动修改为黑白颜色&…...
)
AI面试官:Asp.Net 中使用Log4Net (二)
AI面试官:Asp.Net 中使用Log4Net (二) 当面试涉及到使用log4net日志记录框架的相关问题时,通常会聚焦在如何在.NET或.NET Core应用程序中集成和使用log4net。以下是一些关于log4net的面试题目,以及相应的解答、案例和代码: 文章目…...
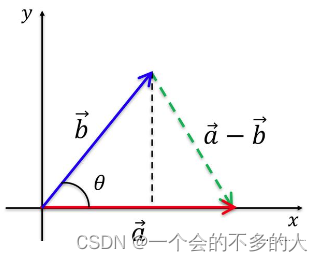
C# Solidworks二次开发:向量相关的数学函数API的使用介绍
今天要讲的是Solidworks二次开发时候,如何使用一些与数学相关的API方法的介绍,在Solidworks中本身提供了一个函数用于对数学对象的访问,函数名为MathUtility。借助这个函数,我们来引出今天要介绍的几个API。 (1&#…...

table 导出表格 Excel
在请求中需要设置 responseType: blob export const requestExport (api, method, params {}, config) > {const apiToken localStorage.getItem(token);const data method GET ? params : data;let headers {BackServer-Token: ${apiToken},};if (config?.headers…...
基于 Flink SQL CDC 数据处理的终极武器
文章目录 一、传统的数据同步方案与 Flink SQL CDC 解决方案1.1 Flink SQL CDC 数据同步与原理解析1.2 基于日志的 CDC 方案介绍1.3 选择 Flink 作为 ETL 工具 二、 基于 Flink SQL CDC 的数据同步方案实践2.1 CDC Streaming ETL2.2 Flink-CDC实践之mysql案例 来源互联网多篇文…...

深入剖析AI大模型:大模型时代的 Prompt 工程全解析
今天聊的内容,我认为是AI开发里面非常重要的内容。它在AI开发里无处不在,当你对 AI 助手说 "用李白的风格写一首关于人工智能的诗",或者让翻译模型 "将这段合同翻译成商务日语" 时,输入的这句话就是 Prompt。…...
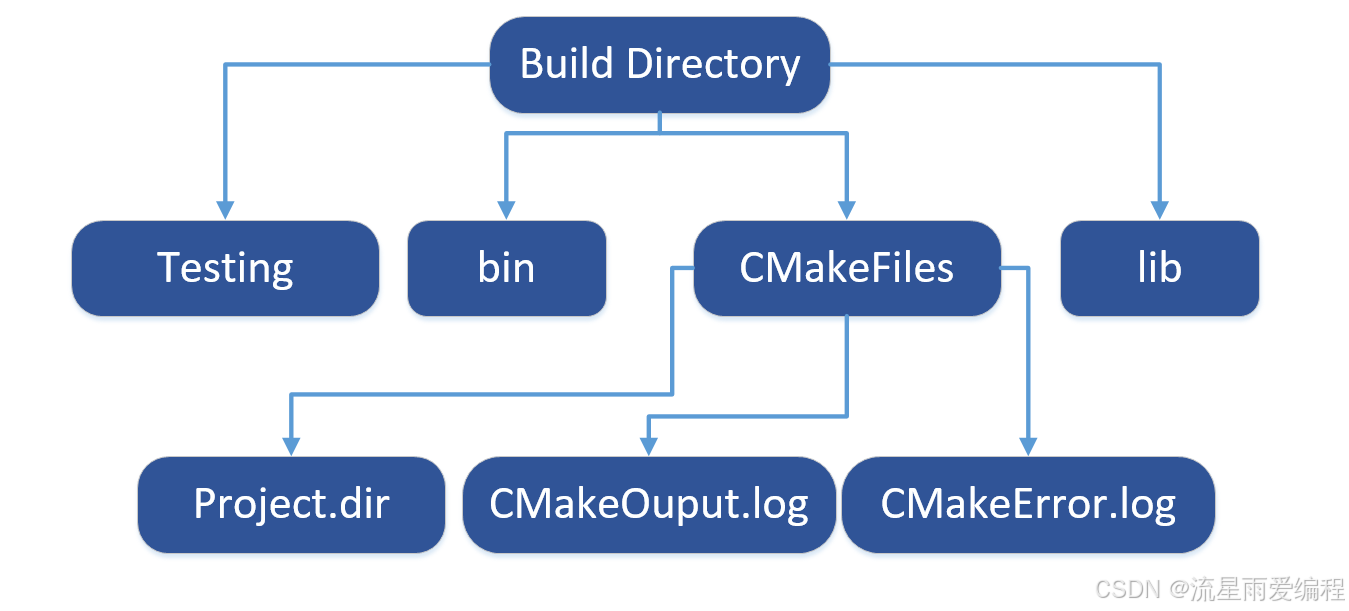
CMake基础:构建流程详解
目录 1.CMake构建过程的基本流程 2.CMake构建的具体步骤 2.1.创建构建目录 2.2.使用 CMake 生成构建文件 2.3.编译和构建 2.4.清理构建文件 2.5.重新配置和构建 3.跨平台构建示例 4.工具链与交叉编译 5.CMake构建后的项目结构解析 5.1.CMake构建后的目录结构 5.2.构…...

将对透视变换后的图像使用Otsu进行阈值化,来分离黑色和白色像素。这句话中的Otsu是什么意思?
Otsu 是一种自动阈值化方法,用于将图像分割为前景和背景。它通过最小化图像的类内方差或等价地最大化类间方差来选择最佳阈值。这种方法特别适用于图像的二值化处理,能够自动确定一个阈值,将图像中的像素分为黑色和白色两类。 Otsu 方法的原…...

第25节 Node.js 断言测试
Node.js的assert模块主要用于编写程序的单元测试时使用,通过断言可以提早发现和排查出错误。 稳定性: 5 - 锁定 这个模块可用于应用的单元测试,通过 require(assert) 可以使用这个模块。 assert.fail(actual, expected, message, operator) 使用参数…...
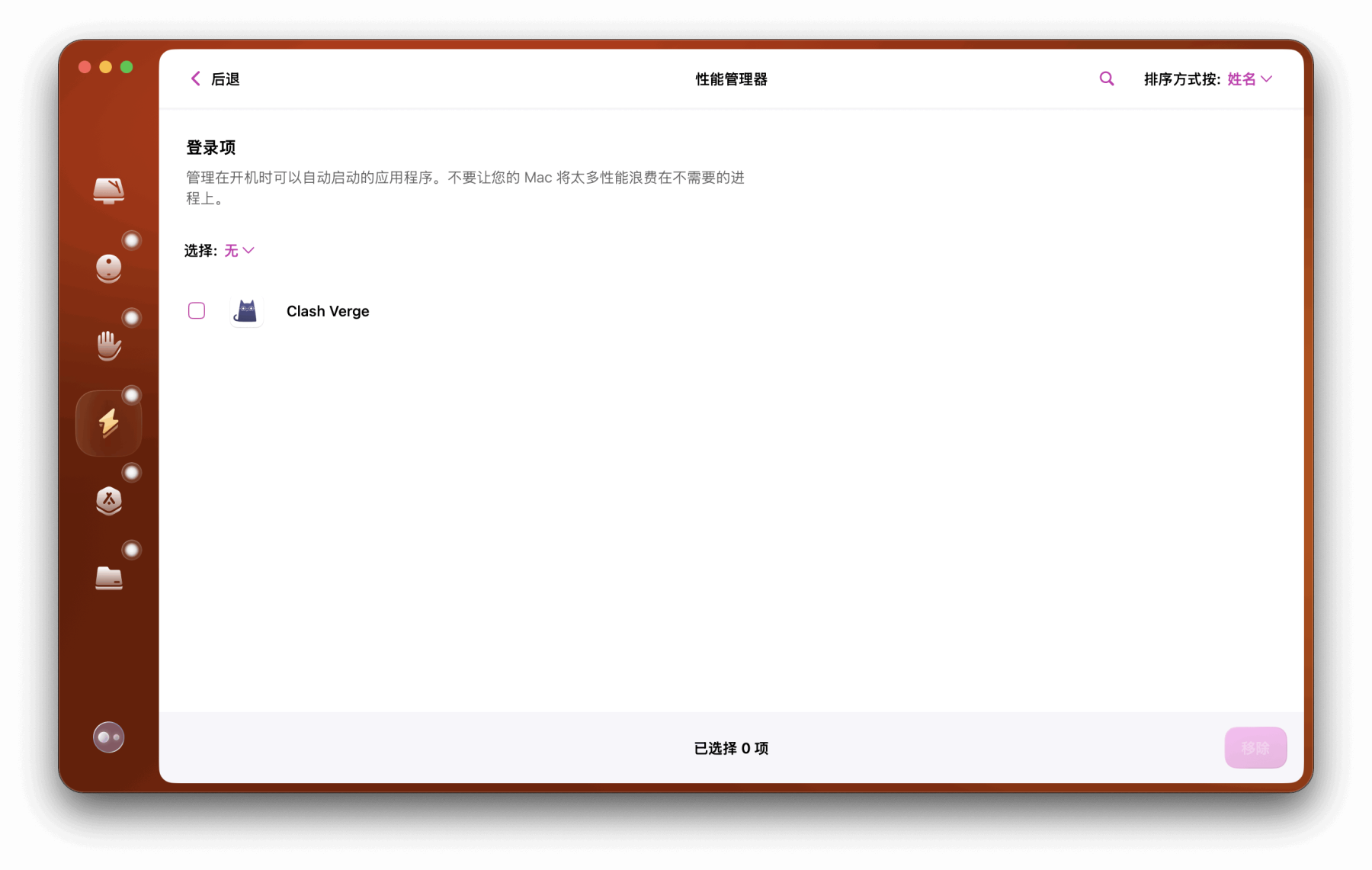
Mac软件卸载指南,简单易懂!
刚和Adobe分手,它却总在Library里给你写"回忆录"?卸载的Final Cut Pro像电子幽灵般阴魂不散?总是会有残留文件,别慌!这份Mac软件卸载指南,将用最硬核的方式教你"数字分手术"࿰…...

ios苹果系统,js 滑动屏幕、锚定无效
现象:window.addEventListener监听touch无效,划不动屏幕,但是代码逻辑都有执行到。 scrollIntoView也无效。 原因:这是因为 iOS 的触摸事件处理机制和 touch-action: none 的设置有关。ios有太多得交互动作,从而会影响…...

如何在最短时间内提升打ctf(web)的水平?
刚刚刷完2遍 bugku 的 web 题,前来答题。 每个人对刷题理解是不同,有的人是看了writeup就等于刷了,有的人是收藏了writeup就等于刷了,有的人是跟着writeup做了一遍就等于刷了,还有的人是独立思考做了一遍就等于刷了。…...
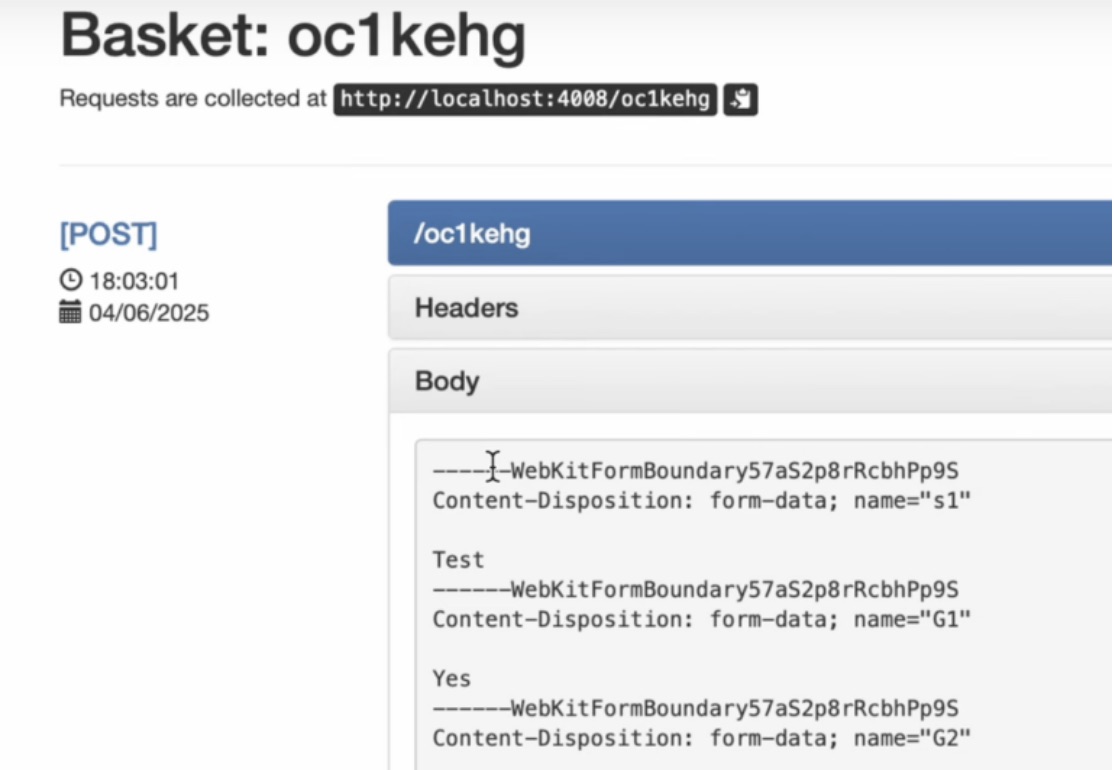
如何在网页里填写 PDF 表格?
有时候,你可能希望用户能在你的网站上填写 PDF 表单。然而,这件事并不简单,因为 PDF 并不是一种原生的网页格式。虽然浏览器可以显示 PDF 文件,但原生并不支持编辑或填写它们。更糟的是,如果你想收集表单数据ÿ…...
:观察者模式)
JS设计模式(4):观察者模式
JS设计模式(4):观察者模式 一、引入 在开发中,我们经常会遇到这样的场景:一个对象的状态变化需要自动通知其他对象,比如: 电商平台中,商品库存变化时需要通知所有订阅该商品的用户;新闻网站中࿰…...

Webpack性能优化:构建速度与体积优化策略
一、构建速度优化 1、升级Webpack和Node.js 优化效果:Webpack 4比Webpack 3构建时间降低60%-98%。原因: V8引擎优化(for of替代forEach、Map/Set替代Object)。默认使用更快的md4哈希算法。AST直接从Loa…...