36.利用解fgoalattain 有约束多元变量多目标规划问题求解(matlab程序)
1.简述
多目标规划的一种求解方法是加权系数法,即为每一个目标赋值一个权系数,把多目标模型转化为一个单目标模型。MATLAB的fgoalattain()函数可以用于求解多目标规划。
基本语法
fgoalattain()函数的用法:
x = fgoalattain(fun,x0,goal,weight)
x = fgoalattain(fun,x0,goal,weight,A,b)
x = fgoalattain(fun,x0,goal,weight,A,b,Aeq,beq)
x=fgoalattain(fun,x0,goal,weight,A,b,Aeq,beq,lb,ub)
x=fgoalattain(fun,x0,goal,weight,A,b,Aeq,beq,lb,ub,nonlcon)
x=fgoalattain(fun,x0,goal,weight,A,b,Aeq,beq,lb,ub,nonlcon,options)
x = fgoalattain(problem)
[x,fval] = fgoalattain(......)
[x,fval,attainfactor,exitflag,output] = fgoalattain(......)
[x,fval,attainfactor,exitflag,output,lambda] = fgoalattain(......)
其中fun 是用 M 文件定义的目标向量函数,x0 是初值,weight 是权重。A,b 定义不等式约束A*x ≤ b ,Aeq,beq定义等式约束 Aeq*x=Beq ,
nonlcon是用 M 文件定义的非线性约束c(x) ≤0,ceq(x)=0 。返回值 fval是目标向量函数的值。
要完整掌握其用法,请用 help fgoalattain 或 type fgoalattain 查询相关的帮助。多目标规划问题的描述
多目标问题可以描述成如下问题:
(x)为待优化的目标函数;x为待优化的变量;lb和ub分别为变量x的下限和上限约束;Aeq∗
也就是说,某一个目标函数的提高需要以另一个目标函数的降低作为代价,我们称这样的解A和B是非劣解,或者说是帕累托最优解,多目标规划问题就是要求解这些帕累托最优解。
2. 求解多目标优化问题方法
目前求解多目标优化问题方法算法主要有基于数学的规划方法和基于遗传算法的两类方法;其中带精英策略的快速非支配排序算法(NSGA-II)是影响最大和应用范围最广的一种多目标遗传算法。在其出现以后,由于它简单有效以及比较明显的优越性,使得该算法已经成为多目标优化问题中的基本算法之一,该算法主要优点:
提出了快速非支配的排序算法,降低了计算非支配序的复杂度。
引入了精英策略,扩大了采样空间。将父代种群与其产生的子代种群组合在一起,共同通过竞争来产生下一代种群,这有利于是父代中的优良个体得以保持,保证那些优良的个体在进化过程中不被丢弃,从而提高优化结果的准确度。并且通过对种群所有个体分层存放,使得最佳个体不会丢失,能够迅速提高种群水平。
引入拥挤度和拥挤度比较算子,这不但克服了NSGA算法中需要人为指定共享参数的缺陷,而且将拥挤度作为种群中个体之间的比较准则,使得准Pareto域中的种群个体能均匀扩展到整个Pareto域,从而保证了种群的多样性。
3.matlab求解
Matlab中提供函数gamultiobj采用的算法就是基于NSGA-II改进的一种多目标优化算法(a variant of NSGA-II),接下来对目标规划中的一些概念进行介绍。
3.1 支配(dominate)与非劣(non-inferior)
在多目标规划问题中,如果个体p至少有一个目标比个体q的好,而且个体p的所有目标都不比个体q的差,那么称个体p支配个体q(p dominate q),或者称个体q受个体p支配(q is dominated by p),也可以说,个体p非劣个体q(p is non- inferior to q)。
3.2 序值(rank)和前端(front)
如果p支配q,那么p的序值比q低,如果p和q互不支配,或者说,p和q互相非劣,那么p和q有相同的序值,序值为1的个体属于第一前端,序值为2的个体属于第二前端,依此推类。显然,在当前种群中,第一前端是完全不受支配的,第二前端受第一前端中个体是支配,这样,通过排序,可以将种群中的个体分配到不同的前端。
3.3 拥挤距离(crowding-distance)
拥挤距离用来计算某前端中的某个体与与该前端中其他个体之间的距离,用以表征个体间的拥挤程度。显然,拥挤距离的值越大,个体间就越不用拥挤,种群的多样性就越好。需要指出的是,只有处于同一前端的个体间才需要计算拥挤距离,不同前端之间计算距离是没有意义的。
3.4 最优前端个体系数(paretofraction)
最优前端个体系数定义为最优前端中的个体在种群中所占有的比例,即最优前端个体数=min{paretofraction∗ *∗种群大小,前端中现存的个体数目},其取值范围为[0到1]。
2.代码
主函数:
clc
clear
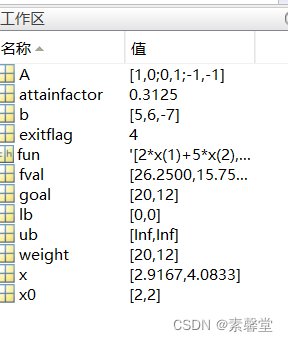
fun='[2*x(1)+5*x(2),4*x(1)+x(2)]';
goal=[20,12];
weight=[20,12];
x0=[2,2];
A=[1 0; 0 1;-1 -1];
b=[5 6 -7];
lb=[0 0];ub=[inf inf];
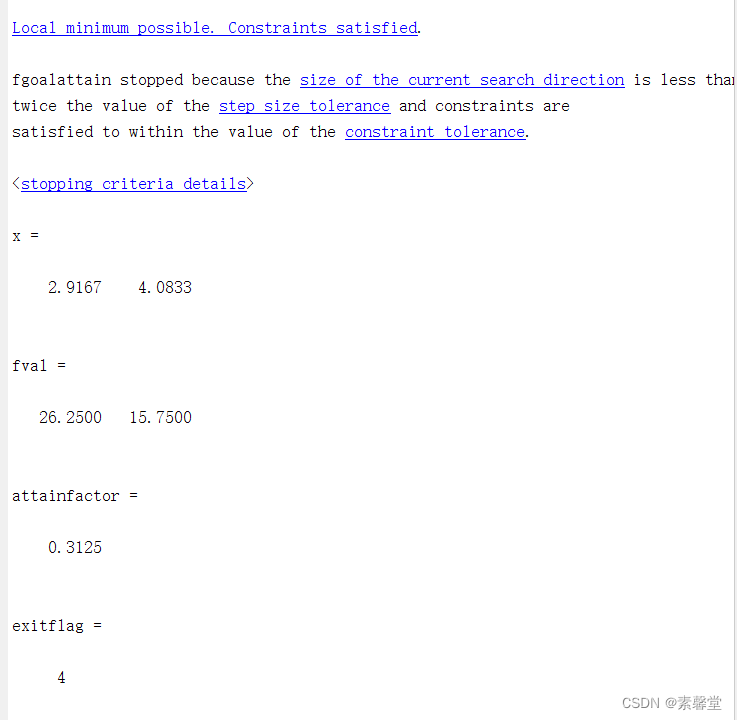
[x,fval,attainfactor,exitflag]=fgoalattain(fun,x0,goal,weight,A,b,[],[],lb,ub)
子函数:
function [x,FVAL,ATTAINFACTOR,EXITFLAG,OUTPUT,LAMBDA] = fgoalattain(FUN,x,GOAL,WEIGHT,A,B,Aeq,Beq,LB,UB,NONLCON,options,varargin)
%FGOALATTAIN solves the multi-objective goal attainment optimization
% problem.
%
% X = FGOALATTAIN(FUN,X0,GOAL,WEIGHT)
% tries to make the objective functions (F) supplied by the function FUN
% attain the goals (GOAL) by varying X. The goals are weighted according
% to WEIGHT. In doing so the following nonlinear programming problem is
% solved:
% min { GAMMA : F(X)-WEIGHT.*GAMMA<=GOAL }
% X,GAMMA
%
% FUN accepts input X and returns a vector (matrix) of function values F
% evaluated at X. X0 may be a scalar, vector, or matrix.
%
% X = FGOALATTAIN(FUN,X0,GOAL,WEIGHT,A,B) solves the goal attainment
% problem subject to the linear inequalities A*X <= B.
%
% X = FGOALATTAIN(FUN,X0,GOAL,WEIGHT,A,B,Aeq,Beq) solves the goal
% attainment problem subject to the linear equalities Aeq*X = Beq as
% well.
%
% X = FGOALATTAIN(FUN,X0,GOAL,WEIGHT,A,B,Aeq,Beq,LB,UB) defines a set of
% lower and upper bounds on the design variables, X, so that the solution
% is in the range LB <= X <= UB. Use empty matrices for LB and U if no
% bounds exist. Set LB(i) = -Inf if X(i) is unbounded below; set
% UB(i) = Inf if X(i) is unbounded above.
%
% X = FGOALATTAIN(FUN,X0,GOAL,WEIGHT,A,B,Aeq,Beq,LB,UB,NONLCON) subjects
% the goal attainment problem to the constraints defined in NONLCON
% (usually a MATLAB file: NONLCON.m). The function NONLCON should return
% the vectors C and Ceq, representing the nonlinear inequalities and
% equalities respectively, when called with feval:
% [C, Ceq] = feval(NONLCON,X). FGOALATTAIN optimizes such that C(X) <= 0
% and Ceq(X) = 0.
%
% X = FGOALATTAIN(FUN,X0,GOAL,WEIGHT,A,B,Aeq,Beq,LB,UB,NONLCON,OPTIONS)
% minimizes the with default optimization parameters replaced by values
% in OPTIONS, an argument created with the OPTIMOPTIONS function. See
% OPTIMOPTIONS for details. Use the SpecifyObjectiveGradient option to
% specify that FUN may be called with two output arguments where the
% second, G, is the partial derivatives of the function df/dX, at the
% point X: [F,G] = feval(FUN,X). Use the SpecifyConstraintGradient option
% to specify that NONLCON may be called with four output arguments:
% [C,Ceq,GC,GCeq] = feval(NONLCON,X) where GC is the partial derivatives
% of the constraint vector of inequalities C an GCeq is the partial
% derivatives of the constraint vector of equalities Ceq. Use OPTIONS =
% [] as a place holder if no options are set.
%
% X = FGOALATTAIN(PROBLEM) solves the goal attainment problem defined in
% PROBLEM. PROBLEM is a structure with the function FUN in
% PROBLEM.objective, the start point in PROBLEM.x0, the 'goal' vector in
% PROBLEM.goal, the 'weight' vector in PROBLEM.weight, the linear
% inequality constraints in PROBLEM.Aineq and PROBLEM.bineq, the linear
% equality constraints in PROBLEM.Aeq and PROBLEM.beq, the lower bounds
% in PROBLEM.lb, the upper bounds in PROBLEM.ub, the nonlinear constraint
% function in PROBLEM.nonlcon, the options structure in PROBLEM.options,
% and solver name 'fgoalattain' in PROBLEM.solver. Use this syntax to
% solve at the command line a problem exported from OPTIMTOOL.
%
% [X,FVAL] = FGOALATTAIN(FUN,X0,...) returns the value of the objective
% function FUN at the solution X.
%
% [X,FVAL,ATTAINFACTOR] = FGOALATTAIN(FUN,X0,...) returns the attainment
% factor at the solution X. If ATTAINFACTOR is negative, the goals have
% been over- achieved; if ATTAINFACTOR is positive, the goals have been
% under-achieved.
%
% [X,FVAL,ATTAINFACTOR,EXITFLAG] = FGOALATTAIN(FUN,X0,...) returns an
% EXITFLAG that describes the exit condition. Possible values of EXITFLAG
% and the corresponding exit conditions are listed below. See the
% documentation for a complete description.
%
% 1 FGOALATTAIN converged to a solution.
% 4 Computed search direction too small.
% 5 Predicted change in ATTAINFACTOR too small.
% 0 Too many function evaluations or iterations.
% -1 Stopped by output/plot function.
% -2 No feasible point found.
%
% [X,FVAL,ATTAINFACTOR,EXITFLAG,OUTPUT] = FGOALATTAIN(FUN,X0,...) returns
% a structure OUTPUT with the number of iterations taken in
% OUTPUT.iterations, the number of function evaluations in
% OUTPUT.funcCount, the norm of the final step in OUTPUT.stepsize, the
% final line search steplength in OUTPUT.lssteplength, the algorithm used
% in OUTPUT.algorithm, the first-order optimality in
% OUTPUT.firstorderopt, and the exit message in OUTPUT.message.
%
% [X,FVAL,ATTAINFACTOR,EXITFLAG,OUTPUT,LAMBDA] = FGOALATTAIN(FUN,X0,...)
% returns the Lagrange multiplier at the solution X: LAMBDA.lower for
% LB, LAMBDA.upper for UB, LAMBDA.ineqlin is for the linear
% inequalities, LAMBDA.eqlin is for the linear equalities,
% LAMBDA.ineqnonlin is for the nonlinear inequalities, and
% LAMBDA.eqnonlin is for the nonlinear equalities.
%
% See also OPTIMOPTIONS, OPTIMGET.
% Copyright 1990-2018 The MathWorks, Inc.
% ---------------------More Details---------------------------
% [x]=fgoalattain(F,x,GOAL,WEIGHT,[],[],[],[],[],[],[],OPTIONS)
% Solves the goal attainment problem where:
%
% X Is a set of design parameters which can be varied.
% F Is a set of objectives which are dependent on X.
% GOAL Set of design goals. The optimizer will try to make
% F<GOAL, F=GOAL, or F>GOAL depending on the formulation.
% WEIGHT Set of weighting parameters which determine the
% relative under or over achievement of the objectives.
% Notes:
% 1.Setting WEIGHT=abs(GOAL) will try to make the objectives
% less than the goals resulting in roughly the same
% percentage under or over achievement of the goals.
% Note: use WEIGHT 1 for GOALS that are 0 (see Note 3 below).
% 2. Setting WEIGHT=-abs(GOAL) will try to make the objectives
% greater then the goals resulting in roughly the same percentage
% under- or over-achievement in the goals.
% Note: use WEIGHT 1 for GOALS that are 0 (see Note 3 below).
% 3. Setting WEIGHT(i)=0 indicates a hard constraint.
% i.e. F<=GOAL.
% OPTIONS.GoalsExactAchieve indicates the number of objectives for which it is
% required for the objectives (F) to equal the goals (GOAL).
% Such objectives should be partitioned into the first few
% elements of F.
% The remaining parameters determine tolerance settings.
%
%
%
defaultopt = struct( ...
'Diagnostics','off', ...
'DiffMaxChange',Inf, ...
'DiffMinChange',0, ...
'Display','final', ...
'FinDiffRelStep', [], ...
'FinDiffType','forward', ...
'FunValCheck','off', ...
'GoalsExactAchieve',0, ...
'GradConstr','off', ...
'GradObj','off', ...
'Hessian','off', ...
'LargeScale','off', ...
'MaxFunEvals','100*numberOfVariables', ...
'MaxIter',400, ...
'MaxSQPIter','10*max(numberOfVariables,numberOfInequalities+numberOfBounds)', ...
'MeritFunction','multiobj', ...
'OutputFcn',[], ...
'PlotFcns',[], ...
'RelLineSrchBnd',[], ...
'RelLineSrchBndDuration',1, ...
'TolCon',1e-6, ...
'TolConSQP',1e-6, ...
'TolFun',1e-6, ...
'TolFunValue',1e-6, ...
'TolX',1e-6, ...
'TypicalX','ones(numberOfVariables,1)', ...
'UseParallel',false ...
);
% If just 'defaults' passed in, return the default options in X
if nargin==1 && nargout <= 1 && strcmpi(FUN,'defaults')
x = defaultopt;
return
end
if nargin < 12
options = [];
if nargin < 11
NONLCON = [];
if nargin < 10
UB = [];
if nargin < 9
LB = [];
if nargin < 8
Beq = [];
if nargin < 7
Aeq = [];
if nargin < 6
B = [];
if nargin < 5
A = [];
end
end
end
end
end
end
end
end
algAS = 'active-set';
% Detect problem structure input
problemInput = false;
if nargin == 1
if isa(FUN,'struct')
problemInput = true;
[FUN,x,GOAL,WEIGHT,A,B,Aeq,Beq,LB,UB,NONLCON,options] = separateOptimStruct(FUN);
else % Single input and non-structure.
error(message('optim:fgoalattain:InputArg'));
end
end
% No options passed. Set options directly to defaultopt after
allDefaultOpts = isempty(options);
% Prepare the options for the solver
options = prepareOptionsForSolver(options, 'fgoalattain');
if nargin < 4 && ~problemInput
error(message('optim:fgoalattain:NotEnoughInputs'))
end
% Check for non-double inputs
msg = isoptimargdbl('FGOALATTAIN', {'X0','GOAL','WEIGHT','A','B','Aeq','Beq','LB','UB'}, ...
x, GOAL, WEIGHT, A, B, Aeq, Beq, LB, UB);
if ~isempty(msg)
error('optim:fgoalattain:NonDoubleInput',msg);
end
% Check for complex X0
if ~isreal(x)
error('optim:fgoalattain:ComplexX0', ...
getString(message('optimlib:commonMsgs:ComplexX0','Fgoalattain')));
end
% Set options to default if no options were passed.
if allDefaultOpts
% Options are all default
options = defaultopt;
end
initVals.xOrigShape = x;
sizes.xShape = size(x);
xnew = [x(:); 0];
numberOfVariablesplus1 = length(xnew);
sizes.nVar = numberOfVariablesplus1 - 1;
WEIGHT = WEIGHT(:);
GOAL = GOAL(:);
diagnostics = strcmpi(optimget(options,'Diagnostics',defaultopt,'fast',allDefaultOpts),'on');
display = optimget(options,'Display',defaultopt,'fast',allDefaultOpts);
flags.detailedExitMsg = contains(display,'detailed');
switch display
case {'off','none'}
verbosity = 0;
case {'notify','notify-detailed'}
verbosity = 1;
case {'final','final-detailed'}
verbosity = 2;
case {'iter','iter-detailed'}
verbosity = 3;
otherwise
verbosity = 2;
end
% Set to column vectors
B = B(:);
Beq = Beq(:);
[xnew(1:sizes.nVar),l,u,msg] = checkbounds(xnew(1:sizes.nVar),LB,UB,sizes.nVar);
if ~isempty(msg)
EXITFLAG = -2;
[FVAL,ATTAINFACTOR,LAMBDA] = deal([]);
OUTPUT.iterations = 0;
OUTPUT.funcCount = 0;
OUTPUT.stepsize = [];
OUTPUT.lssteplength = [];
OUTPUT.algorithm = algAS;
OUTPUT.firstorderopt = [];
OUTPUT.constrviolation = [];
OUTPUT.message = msg;
x(:) = xnew(1:sizes.nVar);
if verbosity > 0
disp(msg)
end
return
end
neqgoals = optimget(options, 'GoalsExactAchieve',defaultopt,'fast',allDefaultOpts);
% flags.meritFunction is 1 unless changed by user to fmincon merit function;
% formerly options(7)
% 0 uses the fmincon single-objective merit and Hess; 1 is the default
flags.meritFunction = strcmp(optimget(options,'MeritFunction',defaultopt,'fast',allDefaultOpts),'multiobj');
lenVarIn = length(varargin);
% goalcon and goalfun also take:
% neqgoals,funfcn,gradfcn,WEIGHT,GOAL,x,errCheck
goalargs = 7;
funValCheck = strcmp(optimget(options,'FunValCheck',defaultopt,'fast',allDefaultOpts),'on');
% Gather options needed for finitedifferences
% Write checked DiffMaxChange, DiffMinChage, FinDiffType, FinDiffRelStep,
% GradObj and GradConstr options back into struct for later use
options.FinDiffType = optimget(options,'FinDiffType',defaultopt,'fast',allDefaultOpts);
options.DiffMinChange = optimget(options,'DiffMinChange',defaultopt,'fast',allDefaultOpts);
options.DiffMaxChange = optimget(options,'DiffMaxChange',defaultopt,'fast',allDefaultOpts);
if options.DiffMinChange >= options.DiffMaxChange
error(message('optim:fgoalattain:DiffChangesInconsistent', sprintf( '%0.5g', options.DiffMinChange ), sprintf( '%0.5g', options.DiffMaxChange )))
end
% Read in and error check option TypicalX
[typicalx,ME] = getNumericOrStringFieldValue('TypicalX','ones(numberOfVariables,1)', ...
ones(sizes.nVar,1),'a numeric value',options,defaultopt);
if ~isempty(ME)
throw(ME)
end
checkoptionsize('TypicalX', size(typicalx), sizes.nVar);
options.TypicalX = typicalx(:);
options = validateFinDiffRelStep(sizes.nVar,options,defaultopt);
options.GradObj = optimget(options,'GradObj',defaultopt,'fast',allDefaultOpts);
options.GradConstr = optimget(options,'GradConstr',defaultopt,'fast',allDefaultOpts);
flags.grad = strcmp(options.GradObj,'on');
flags.gradconst = strcmp(options.GradConstr,'on');
if strcmpi(optimget(options,'Hessian',defaultopt,'fast',allDefaultOpts),'on')
warning(message('optim:fgoalattain:UserHessNotUsed'))
end
flags.hess = false;
constflag = ~isempty(NONLCON);
% If nonlinear constraints exist, need either both function and constraint
% gradients, or none
if constflag
flags.gradconst = flags.grad && flags.gradconst;
else % No user nonlinear constraints
flags.gradconst = flags.grad;
end
flags.grad = true; % Always can compute gradient of goalfun since based on x
% Update options GradObj and GradConstr to reflect the update for the
% constraint function
if ~flags.gradconst
options.GradObj = 'off';
options.GradConstr = 'off';
end
% if we have a string object input, we need to convert to char arrays
if isstring(FUN)
if isscalar(FUN)
FUN = char(FUN);
else
FUN = cellstr(FUN);
end
end
% Convert to inline function as needed
% FUN is called from goalcon; goalfun is based only on x
if ~isempty(FUN) % will detect empty string, empty matrix, empty cell array
% Pass flags.gradconst as the flag which tells whether or not to
% evaluate gradients from the user function. flags.grad is meant for
% goalfun and is always set to true for this problem.
funfcn = optimfcnchk(FUN,'goalcon',length(varargin),funValCheck, ...
flags.gradconst,flags.hess);
else
error(message('optim:fgoalattain:InvalidFUN'))
end
if constflag % NONLCON is non-empty
confcn = optimfcnchk(NONLCON,'goalcon',length(varargin),funValCheck, ...
flags.gradconst,false,true);
else
confcn{1} = '';
end
% Pass in false for funValCheck argument as goalfun/goalcon is not a user function
ffun = optimfcnchk(@goalfun,'fgoalattain',lenVarIn+goalargs,false,flags.grad);
cfun = optimfcnchk(@goalcon,'fgoalattain',lenVarIn+goalargs,false,flags.gradconst,false,true);
lenvlb = length(l);
lenvub = length(u);
i = 1:lenvlb;
lindex = xnew(i) < l(i);
if any(lindex)
xnew(lindex) = l(lindex) + 1e-4;
end
i = 1:lenvub;
uindex = xnew(i) > u(i);
if any(uindex)
xnew(uindex) = u(uindex);
end
x(:) = xnew(1:end-1);
sizes.nFun = length(GOAL); % Assume the length of GOAL is same as length
% of user function; we will verify this later.
% Check if neqgoals (GoalsExactAchieve) is less or equal to the length of user function
if neqgoals > sizes.nFun
warning(message('optim:fgoalattain:InconsistentNumEqGoal'))
% The number of goals to be achieved exactly can be at most equal to the
% length of user objective function.
neqgoals = sizes.nFun;
end
if length(WEIGHT) ~= length(GOAL)
error(message('optim:fgoalattain:InvalidWeightAndGoalSizes'))
end
initVals.g = zeros(numberOfVariablesplus1,1);
initVals.H = [];
errCheck = true; % Perform error checking on initial function evaluations
extravarargin = [{neqgoals,funfcn,confcn,WEIGHT,GOAL,x,errCheck}, varargin];
% Evaluate goal function
switch ffun{1}
case 'fun'
initVals.f = feval(ffun{3},xnew,extravarargin{:});
case 'fungrad'
[initVals.f,initVals.g] = feval(ffun{3},xnew,extravarargin{:});
otherwise
error(message('optim:fgoalattain:InvalidCalltype'))
end
% Evaluate goal constraints
switch cfun{1}
case 'fun'
[ctmp,ceqtmp] = feval(cfun{3},xnew,extravarargin{:});
initVals.ncineq = ctmp(:);
initVals.nceq = ceqtmp(:);
initVals.gnc = zeros(numberOfVariablesplus1,length(initVals.ncineq));
initVals.gnceq = zeros(numberOfVariablesplus1,length(initVals.nceq));
case 'fungrad'
[ctmp,ceqtmp,initVals.gnc,initVals.gnceq] = feval(cfun{3},xnew,extravarargin{:});
initVals.ncineq = ctmp(:);
initVals.nceq = ceqtmp(:);
otherwise
error(message('optim:fgoalattain:InvalidCalltype'))
end
% Make sure empty constraint and their derivatives have correct sizes (not 0-by-0):
if isempty(initVals.ncineq)
initVals.ncineq = reshape(initVals.ncineq,0,1);
end
if isempty(initVals.nceq)
initVals.nceq = reshape(initVals.nceq,0,1);
end
if isempty(Aeq)
Aeq = reshape(Aeq,0,sizes.nVar);
Beq = reshape(Beq,0,1);
end
if isempty(A)
A = reshape(A,0,sizes.nVar);
B = reshape(B,0,1);
end
sizes.mNonlinEq = length(initVals.nceq);
sizes.mNonlinIneq = length(initVals.ncineq);
[lin_eq,Aeqcol] = size(Aeq);
[lin_ineq,Acol] = size(A);
if Aeqcol ~= sizes.nVar
error(message('optim:fgoalattain:InvalidSizeOfAeq', sizes.nVar))
end
if Acol ~= sizes.nVar
error(message('optim:fgoalattain:InvalidSizeOfA', sizes.nVar))
end
just_user_constraints = sizes.mNonlinIneq - sizes.nFun - neqgoals;
OUTPUT.algorithm = algAS;
if diagnostics
% Do diagnostics on information so far
diagnose('fgoalattain',OUTPUT,flags.gradconst,flags.hess,constflag,flags.gradconst,...
xnew(1:end-1),sizes.mNonlinEq,just_user_constraints,lin_eq,lin_ineq,LB,UB,funfcn,confcn);
end
% Add extra column to account for extra xnew component
A = [A,zeros(lin_ineq,1)];
Aeq = [Aeq,zeros(lin_eq,1)];
% Only need to perform error checking on initial function evaluations
errCheck = false;
% Convert function handles to anonymous functions with additional arguments
% in its workspace. Even though ffun and cfun are internal functions, put fevals
% here for consistency.
ffun{3} = @(y,varargin) feval(ffun{3},y,neqgoals,funfcn,confcn,WEIGHT,GOAL,x,errCheck,varargin{:});
cfun{3} = @(y,varargin) feval(cfun{3},y,neqgoals,funfcn,confcn,WEIGHT,GOAL,x,errCheck,varargin{:});
% Problem related data is passed to nlconst in problemInfo structure
problemInfo.nHardConstraints = neqgoals;
problemInfo.weight = WEIGHT;
problemInfo.goal = GOAL;
% Create default structure of flags for finitedifferences:
% This structure will (temporarily) ignore some of the features that are
% algorithm-specific (e.g. scaling and fault-tolerance) and can be turned
% on later for the main algorithm.
finDiffFlags.fwdFinDiff = strcmpi(options.FinDiffType,'forward');
finDiffFlags.scaleObjConstr = false; % No scaling for now
finDiffFlags.chkFunEval = false; % No fault-tolerance yet
finDiffFlags.chkComplexObj = false; % No need to check for complex values
finDiffFlags.isGrad = false; % Multi-objective
finDiffFlags.hasLBs = false(sizes.nVar,1);
finDiffFlags.hasUBs = false(sizes.nVar,1);
if ~isempty(l)
finDiffFlags.hasLBs = isfinite(l); % Finite lower bounds
end
if ~isempty(u)
finDiffFlags.hasUBs = isfinite(u); % Finite upper bounds
end
% Adjust nVar-length vectors used by finite-differencing for auxiliary variable
options.TypicalX = [typicalx(:); 1]; % add element for auxiliary variable
if finDiffFlags.fwdFinDiff
options.FinDiffRelStep = [options.FinDiffRelStep; sqrt(eps)];
else
options.FinDiffRelStep = [options.FinDiffRelStep; eps^(1/3)];
end
l = [l;-Inf];
u = [u; Inf];
finDiffFlags.hasLBs = [finDiffFlags.hasLBs; false];
finDiffFlags.hasUBs = [finDiffFlags.hasUBs; false];
finDiffFlags.isGrad = true; % New formulation has single objective
% For parallel finite difference (if needed) we need to send the function
% handles now to the workers. This avoids sending the function handles in
% every iteration of the solver. The output from 'setOptimFcnHandleOnWorkers'
% is a onCleanup object that will perform cleanup task on the workers.
UseParallel = optimget(options,'UseParallel',defaultopt,'fast',allDefaultOpts);
cleanupObj = setOptimFcnHandleOnWorkers(UseParallel,ffun,cfun); %#ok<NASGU>
% Flag to determine whether to look up the exit msg.
flags.makeExitMsg = logical(verbosity) || nargout > 4;
[xnew,ATTAINFACTOR,LAMBDA,EXITFLAG,OUTPUT]=...
nlconst(ffun,xnew,l,u,full(A),B,full(Aeq),Beq,cfun,options,defaultopt, ...
finDiffFlags,verbosity,flags,initVals,problemInfo,varargin{:});
if ~isempty(LAMBDA)
just_user_constraints = length(LAMBDA.ineqnonlin) - sizes.nFun - neqgoals;
LAMBDA.ineqnonlin = LAMBDA.ineqnonlin(1:just_user_constraints);
LAMBDA.lower = LAMBDA.lower(1:sizes.nVar);
LAMBDA.upper = LAMBDA.upper(1:sizes.nVar);
end
% Evaluate user objective functions
x(:) = xnew(1:end-1);
FVAL = feval(funfcn{3},x,varargin{:});
% Force a cleanup of the handle object. Sometimes, MATLAB may
% delay the cleanup but we want to be sure it is cleaned up.
clear cleanupObj
3.运行结果
相关文章:
36.利用解fgoalattain 有约束多元变量多目标规划问题求解(matlab程序)
1.简述 多目标规划的一种求解方法是加权系数法,即为每一个目标赋值一个权系数,把多目标模型转化为一个单目标模型。MATLAB的fgoalattain()函数可以用于求解多目标规划。 基本语法 fgoalattain()函数的用法: x fgoalattain(fun,x0,goal,weig…...

EPPlus 读取和生成Excel
在项目中添加了EPPlus库的引用,你可以通过NuGet包管理器或手动将EPPlus库添加到项目中。同时,需要注意的是EPPlus库支持的是xlsx格式的Excel文件。 读取 使用EPPlus读取本地Excel文件的示例代码如下: using OfficeOpenXml;public void Rea…...
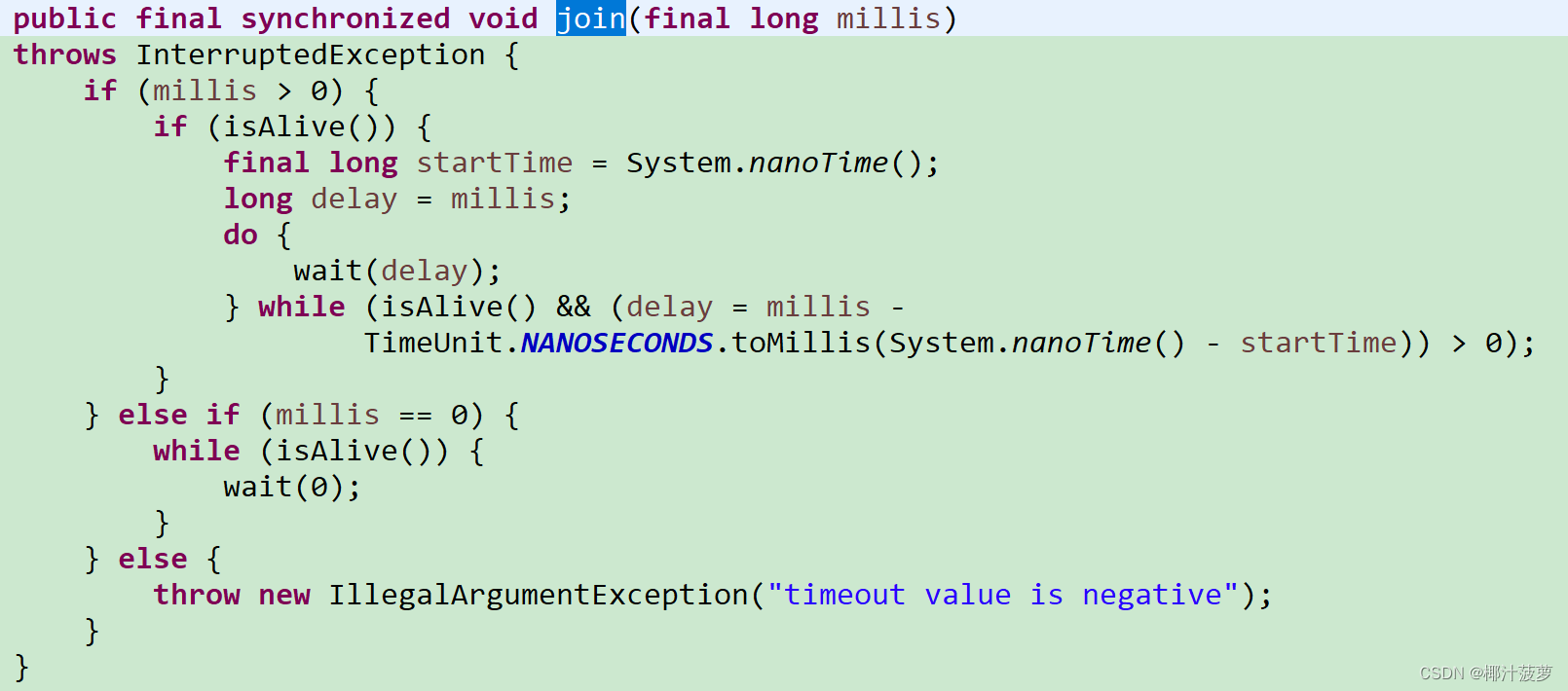
Java wait() notify() join()用法讲解
一、wait() 1. 源码: 实际调用本地方法 2. 作用 释放当前锁,并让当前线程进入等待状态;timeoutMillis为等待时间,单位毫秒,如果为0则表示无限等待下去;该方法使用前提是:当前执行线程必须持…...

新手注意事项-visual studio 来实现别踩白块儿
自己之前为了熟悉easyx练习过一个简单的项目,别踩白块儿,链接在这里,别踩白块儿,当时比较稚嫩,很多东西都不会,可以说是只知道最基本的语法,头文件都不知道,一个一个查资料弄懂的&am…...

【力扣】2810. 故障键盘 <模拟>
【力扣】2810. 故障键盘 你的笔记本键盘存在故障,每当你在上面输入字符 ‘i’ 时,它会反转你所写的字符串。而输入其他字符则可以正常工作。给你一个下标从 0 开始的字符串 s ,请你用故障键盘依次输入每个字符。返回最终笔记本屏幕上输出的字…...
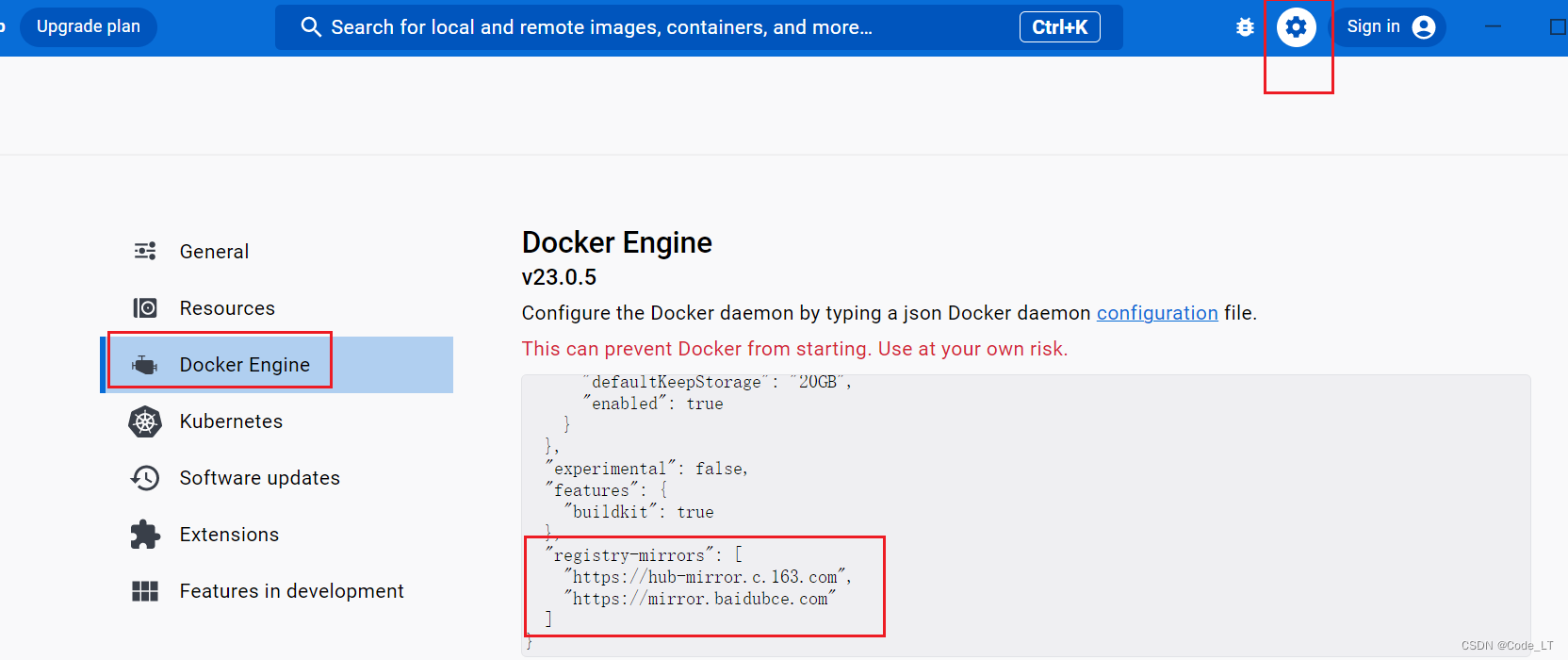
Docker desktop使用配置
1. 下载安装 https://www.docker.com/ 官网下载并安装doker desktop 2. 配置镜像 (1)首先去阿里云网站上进行注册:https://cr.console.aliyun.com/cn-hangzhou/instances/mirrors (2)注册完成后搜索:容…...

第一百二十一天学习记录:线性代数:矩阵乘法运算(宋浩板书)
在编程和学习数据结构的过程中,发现有些算法会用到矩阵和矩阵的乘法运算,因此先将这一个知识点学习一下。 矩阵和行列式的区别 各种矩阵的概念 矩阵运算 乘法☆ 总结三条不满足...
模拟实现消息队列项目(系列3) -- 服务器模块(硬盘管理)
目录 前言 1. 创建项目 2. 创建核心类 2.1 Exchange 2.2 MSQueue 2.3 Binding 2.4 Message 3. 数据库设计 3.1 SQLite 配置 3.2 Mapper层代码实现 3.2.1 创建表操作 3.2.2 交换机 队列 绑定的增加和删除 3.3 实现DataBaseManager 3.4 DataBaseManager单元测试 4.…...

【iOS】锁
线程安全 当一个线程访问数据的时候,其他的线程不能对其进行访问,直到该线程访问完毕。简单来讲就是在同一时刻,对同一个数据操作的线程只有一个。而线程不安全,则是在同一时刻可以有多个线程对该数据进行访问,从而得…...
2021笔试题)
杰发科技(合肥)2021笔试题
笔试时间:2020.10.17 ,10:30-12:00。 岗位:Linux 驱动工程师。 题型:选择题8道,填空题10道,编程题4道。 杰发科技主要做汽车电子,由北京四维图新控股,对汽车电子感兴趣的有机会可以应聘试试。 选择题 1、128,4 #include<stdio.h> unsigned int getstrsiz…...

Java堆排序
目录 PriorityQueue自己实现 PriorityQueue public class PriorityQueueMain {public static void main(String[] args) {int[] temp {40, 2, 33, 26, 35, 8, 8, 26, 29, 2};PriorityQueue<Integer> priorityQueue new PriorityQueue<>();for (int i 0; i <…...

GitHub的基本使用教程
GitHub是一个基于web的版本控制和协作平台。它允许开发人员将他们的代码存储库存储在云中,并与其他人一起进行工作。GitHub还提供了各种工具和功能来帮助开发人员管理和组织他们的代码项目,包括拉出请求、问题跟踪、代码评论等等。此外,它托管…...

objectMapper.configure 方法的作用和使用
objectMapper.configure 方法是 Jackson 提供的一个用于配置 ObjectMapper 对象的方法。ObjectMapper 是 Jackson 库的核心类,用于将 Java 对象与 JSON 数据相互转换。 configure 方法的作用是设置 ObjectMapper 的配置选项,例如设置日期格式、设置序列…...

面试热题(x的平方根)
给你一个非负整数 x ,计算并返回 x 的 算术平方根 。 由于返回类型是整数,结果只保留 整数部分 ,小数部分将被 舍去 。 注意:不允许使用任何内置指数函数和算符,例如 pow(x, 0.5) 或者 x ** 0.5 。 这道题虽然是简单题…...

食品溯源合约 -- 智能合约实例
前提 Roles: 实现对用户地址的角色权限管控,添加、删除角色。 Producer: 生产商角色管控。 ... FoodInfoItem: 食品信息管控。生产商、中间商、超市添加食品信息。 Trace:食品溯源合约,主要负责对以上几个合约的统筹协作。 Roles // SPDX-License-Identifier: MIT pragm…...

SAP系统中二代增强提供了4中增强函数的查找方法
1 Introduction The second enhancement is used widely by sap .We can set break-point in the function . The function is in the SMOD FG. 2 Detail SAP系统中二代增强提供了4中增强函数的查找方法: MODX_ALL_ACTIVE_MENUENTRIES (菜单增强) MODX_FUNCTION…...

RabbitMQ-SpringBoot2
1.依赖引用 <dependency> <groupId>org.springframework.boot</groupId> <artifactId>spring-boot-starter-amqp</artifactId> </dependency> 2.配置文件 spring: rabbitmq: host: 192.168.2.17 port: 5672 usernam…...

MyBatis核心 - SqlSession如何通过Mapper接口生成Mapper对象
书接上文 MyBatis – 执行流程 我们通过SqlSession获取到了UserMapper对象,代码如下: // 获取SqlSession对象 SqlSession sqlSession sqlSessionFactory.openSession();// 执行查询操作 try {// 获取映射器接口UserMapper userMapper sqlSession.get…...

【Git】标签管理与Git Flow模型
目录 一、操作标签 二、推送标签 三、删除标签 四、Git Flow模型分支设计 一、操作标签 git tag # 查看有哪些标签 git tag [name] # 给最近一次commit打标签 git tag [name] [commitID] #给指定的commit打标签 git tag -a [name] -m desc # 打标签并添加描述 二、推送标…...

日志分析和流量分析
目录 [陇剑杯 2021]日志分析(问1) [陇剑杯 2021]日志分析(问2) [陇剑杯 2021]日志分析(问3) [陇剑杯 2021]简单日志分析(问1) [陇剑杯 2021]简单日志分析(问3&#…...

Admin.Net中的消息通信SignalR解释
定义集线器接口 IOnlineUserHub public interface IOnlineUserHub {/// 在线用户列表Task OnlineUserList(OnlineUserList context);/// 强制下线Task ForceOffline(object context);/// 发布站内消息Task PublicNotice(SysNotice context);/// 接收消息Task ReceiveMessage(…...
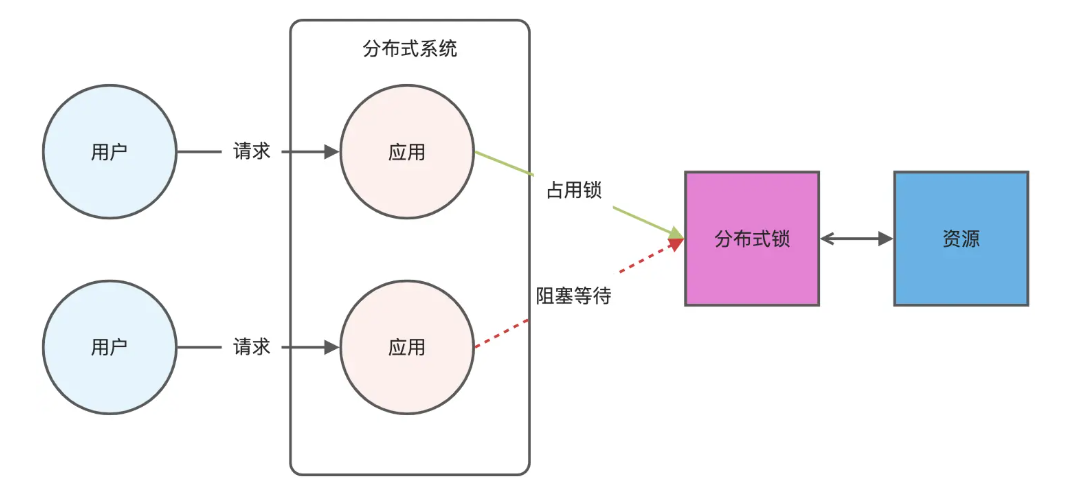
Redis相关知识总结(缓存雪崩,缓存穿透,缓存击穿,Redis实现分布式锁,如何保持数据库和缓存一致)
文章目录 1.什么是Redis?2.为什么要使用redis作为mysql的缓存?3.什么是缓存雪崩、缓存穿透、缓存击穿?3.1缓存雪崩3.1.1 大量缓存同时过期3.1.2 Redis宕机 3.2 缓存击穿3.3 缓存穿透3.4 总结 4. 数据库和缓存如何保持一致性5. Redis实现分布式…...

基础测试工具使用经验
背景 vtune,perf, nsight system等基础测试工具,都是用过的,但是没有记录,都逐渐忘了。所以写这篇博客总结记录一下,只要以后发现新的用法,就记得来编辑补充一下 perf 比较基础的用法: 先改这…...
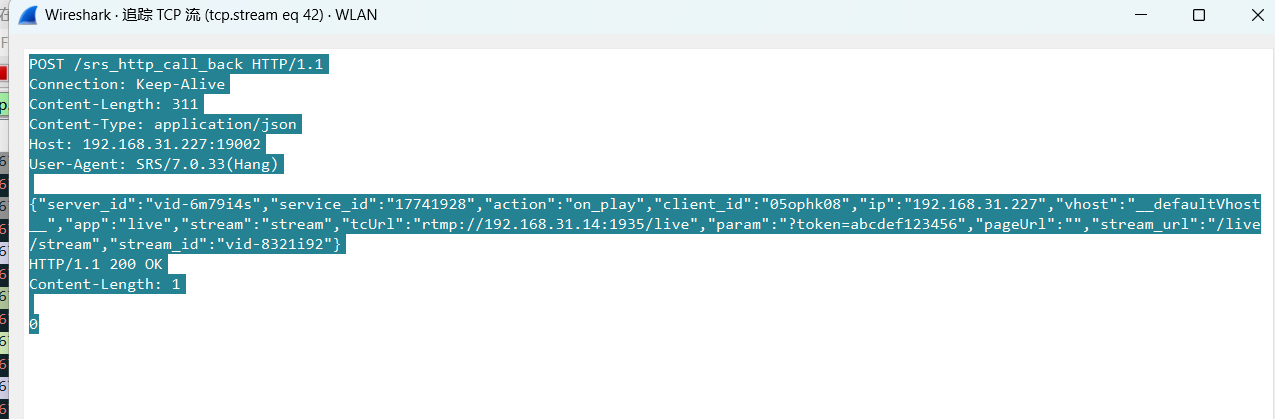
srs linux
下载编译运行 git clone https:///ossrs/srs.git ./configure --h265on make 编译完成后即可启动SRS # 启动 ./objs/srs -c conf/srs.conf # 查看日志 tail -n 30 -f ./objs/srs.log 开放端口 默认RTMP接收推流端口是1935,SRS管理页面端口是8080,可…...

HTML前端开发:JavaScript 常用事件详解
作为前端开发的核心,JavaScript 事件是用户与网页交互的基础。以下是常见事件的详细说明和用法示例: 1. onclick - 点击事件 当元素被单击时触发(左键点击) button.onclick function() {alert("按钮被点击了!&…...

爬虫基础学习day2
# 爬虫设计领域 工商:企查查、天眼查短视频:抖音、快手、西瓜 ---> 飞瓜电商:京东、淘宝、聚美优品、亚马逊 ---> 分析店铺经营决策标题、排名航空:抓取所有航空公司价格 ---> 去哪儿自媒体:采集自媒体数据进…...
Unity | AmplifyShaderEditor插件基础(第七集:平面波动shader)
目录 一、👋🏻前言 二、😈sinx波动的基本原理 三、😈波动起来 1.sinx节点介绍 2.vertexPosition 3.集成Vector3 a.节点Append b.连起来 4.波动起来 a.波动的原理 b.时间节点 c.sinx的处理 四、🌊波动优化…...

安全突围:重塑内生安全体系:齐向东在2025年BCS大会的演讲
文章目录 前言第一部分:体系力量是突围之钥第一重困境是体系思想落地不畅。第二重困境是大小体系融合瓶颈。第三重困境是“小体系”运营梗阻。 第二部分:体系矛盾是突围之障一是数据孤岛的障碍。二是投入不足的障碍。三是新旧兼容难的障碍。 第三部分&am…...
三分算法与DeepSeek辅助证明是单峰函数
前置 单峰函数有唯一的最大值,最大值左侧的数值严格单调递增,最大值右侧的数值严格单调递减。 单谷函数有唯一的最小值,最小值左侧的数值严格单调递减,最小值右侧的数值严格单调递增。 三分的本质 三分和二分一样都是通过不断缩…...
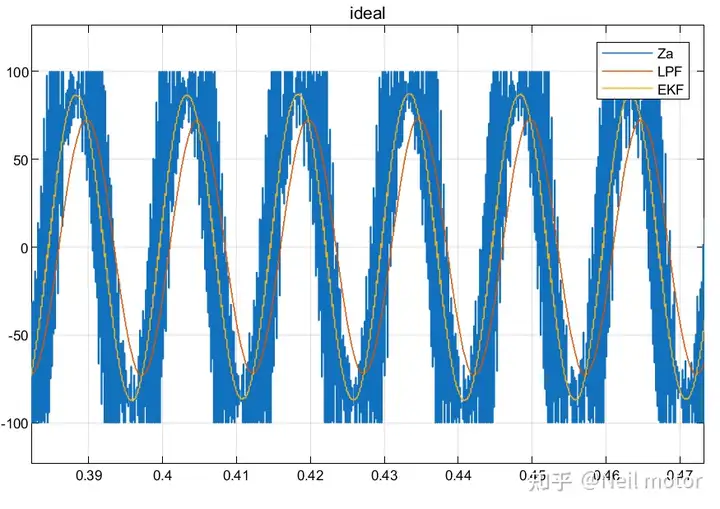
永磁同步电机无速度算法--基于卡尔曼滤波器的滑模观测器
一、原理介绍 传统滑模观测器采用如下结构: 传统SMO中LPF会带来相位延迟和幅值衰减,并且需要额外的相位补偿。 采用扩展卡尔曼滤波器代替常用低通滤波器(LPF),可以去除高次谐波,并且不用相位补偿就可以获得一个误差较小的转子位…...