基于yolo v5与Deep Sort进行车辆以及速度检测与目标跟踪实战
项目实验结果展示:
基于yolo v5与Deep Sort进行车辆以及速度检测与目标跟踪实战——项目可以私聊
该项目可以作为毕业设计,以及企业级的项目开发,主要包含了车辆的目标检测、目标跟踪以及车辆的速度计算,同样可以进行二次开发。
这里附上主要的检测代码
import torch
import numpy as np
from models.experimental import attempt_load
from utils.general import non_max_suppression, scale_coords
from utils.torch_utils import select_device
from utils.datasets import letterbox
import cv2
from deep_sort.utils.parser import get_config
from deep_sort.deep_sort import DeepSort
from haversine import haversine, Unit
from sys import platform as _platformclass Detector:"""yolo目标检测"""def __init__(self):self.img_size = 1280self.conf_thres = 0.5self.iou_thres=0.5# 目标检测权重self.weights = 'weights/highway_m_300.pt'self.device = '0' if torch.cuda.is_available() else 'cpu'self.device = select_device(self.device)model = attempt_load(self.weights, map_location=self.device)model.to(self.device).eval()# 判断系统,支持MACOS 和 windowsif _platform == "darwin":# MAC OS Xmodel.float()else:# Windowsmodel.half()# self.m = modelself.names = model.module.names if hasattr(model, 'module') else model.names# 图片预处理def preprocess(self, img):img = letterbox(img, new_shape=self.img_size)[0]img = img[:, :, ::-1].transpose(2, 0, 1)img = np.ascontiguousarray(img)img = torch.from_numpy(img).to(self.device)if _platform == "darwin":# MAC OS Ximg = img.float() else:# Windowsimg = img.half()img /= 255.0 # 图像归一化if img.ndimension() == 3:img = img.unsqueeze(0)return img# 目标检测def yolo_detect(self, im):img = self.preprocess(im)pred = self.m(img, augment=False)[0]pred = pred.float()pred = non_max_suppression(pred, self.conf_thres, self.iou_thres )pred_boxes = []for det in pred:if det is not None and len(det):det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im.shape).round()for *x, conf, cls_id in det:lbl = self.names[int(cls_id)]x1, y1 = int(x[0]), int(x[1])x2, y2 = int(x[2]), int(x[3])pred_boxes.append((x1, y1, x2, y2, lbl, conf))return pred_boxesclass Tracker:"""deepsort追踪"""def __init__(self):cfg = get_config()cfg.merge_from_file("deep_sort/configs/deep_sort.yaml")self.deepsort = DeepSort(cfg.DEEPSORT.REID_CKPT,max_dist=cfg.DEEPSORT.MAX_DIST, min_confidence=cfg.DEEPSORT.MIN_CONFIDENCE,nms_max_overlap=cfg.DEEPSORT.NMS_MAX_OVERLAP, max_iou_distance=cfg.DEEPSORT.MAX_IOU_DISTANCE,max_age=cfg.DEEPSORT.MAX_AGE, n_init=cfg.DEEPSORT.N_INIT, nn_budget=cfg.DEEPSORT.NN_BUDGET,use_cuda=True)def update_tracker(self,image, yolo_bboxes):bbox_xywh = []confs = []clss = []for x1, y1, x2, y2, cls_id, conf in yolo_bboxes:obj = [int((x1+x2)/2), int((y1+y2)/2),x2-x1, y2-y1]bbox_xywh.append(obj)confs.append(conf)clss.append(cls_id)xywhs = torch.Tensor(bbox_xywh)confss = torch.Tensor(confs)#更新追踪结果outputs = self.deepsort.update(xywhs, confss, clss, image)bboxes2draw = []for value in list(outputs):x1, y1, x2, y2, cls_, track_id = valuebboxes2draw.append((x1, y1, x2, y2, cls_, track_id))return bboxes2drawclass PixelMapper(object):"""Create an object for converting pixels to geographic coordinates,using four points with known locations which form a quadrilteral in both planesParameters----------pixel_array : (4,2) shape numpy arrayThe (x,y) pixel coordinates corresponding to the top left, top right, bottom right, bottom leftpixels of the known regionlonlat_array : (4,2) shape numpy arrayThe (lon, lat) coordinates corresponding to the top left, top right, bottom right, bottom leftpixels of the known region"""def __init__(self, pixel_array, lonlat_array):assert pixel_array.shape==(4,2), "Need (4,2) input array"assert lonlat_array.shape==(4,2), "Need (4,2) input array"self.M = cv2.getPerspectiveTransform(np.float32(pixel_array),np.float32(lonlat_array))self.invM = cv2.getPerspectiveTransform(np.float32(lonlat_array),np.float32(pixel_array))def pixel_to_lonlat(self, pixel):"""Convert a set of pixel coordinates to lon-lat coordinatesParameters----------pixel : (N,2) numpy array or (x,y) tupleThe (x,y) pixel coordinates to be convertedReturns-------(N,2) numpy arrayThe corresponding (lon, lat) coordinates"""if type(pixel) != np.ndarray:pixel = np.array(pixel).reshape(1,2)assert pixel.shape[1]==2, "Need (N,2) input array" pixel = np.concatenate([pixel, np.ones((pixel.shape[0],1))], axis=1)lonlat = np.dot(self.M,pixel.T)return (lonlat[:2,:]/lonlat[2,:]).Tdef lonlat_to_pixel(self, lonlat):"""Convert a set of lon-lat coordinates to pixel coordinatesParameters----------lonlat : (N,2) numpy array or (x,y) tupleThe (lon,lat) coordinates to be convertedReturns-------(N,2) numpy arrayThe corresponding (x, y) pixel coordinates"""if type(lonlat) != np.ndarray:lonlat = np.array(lonlat).reshape(1,2)assert lonlat.shape[1]==2, "Need (N,2) input array" lonlat = np.concatenate([lonlat, np.ones((lonlat.shape[0],1))], axis=1)pixel = np.dot(self.invM,lonlat.T)return (pixel[:2,:]/pixel[2,:]).Tclass SpeedEstimate:def __init__(self):# 配置相机画面与地图的映射点,需要根据自己镜头和地图上的点重新配置quad_coords = {"lonlat": np.array([[30.221866, 120.287402], # top left[30.221527,120.287632], # top right[30.222098,120.285806], # bottom left[30.221805,120.285748] # bottom right]),"pixel": np.array([[196,129],# top left[337,111], # top right[12,513], # bottom left[530,516] # bottom right])}self.pm = PixelMapper(quad_coords["pixel"], quad_coords["lonlat"])def pixel2lonlat(self,x,y):# 像素坐标转为经纬度return self.pm.pixel_to_lonlat((x,y))[0]def pixelDistance(self,pa_x,pa_y,pb_x,pb_y):# 相机画面两点在地图上实际的距离lonlat_a = self.pm.pixel_to_lonlat((pa_x,pa_y))lonlat_b = self.pm.pixel_to_lonlat((pb_x,pb_y))lonlat_a = tuple(lonlat_a[0])lonlat_b = tuple(lonlat_b[0])return haversine(lonlat_a, lonlat_b, unit='m')项目需求+V: gldz_super
相关文章:

基于yolo v5与Deep Sort进行车辆以及速度检测与目标跟踪实战
项目实验结果展示: 基于yolo v5与Deep Sort进行车辆以及速度检测与目标跟踪实战——项目可以私聊 该项目可以作为毕业设计,以及企业级的项目开发,主要包含了车辆的目标检测、目标跟踪以及车辆的速度计算,同样可以进行二次开发。 …...

以指标驱动,保险、零售、制造企业开启精益敏捷运营的新范式
近日,以“释放数智生产力”为主题的 Kyligence 用户大会在上海前滩香格里拉大酒店成功举行。大会包含上午的主论坛和下午的 4 场平行论坛,并举办了闭门会议、Open Day 等活动。来自金融、零售、制造、医药等行业的客户及合作伙伴带来了超过 23 场主题演讲…...
MyBatis-动态SQL-foreach
目录 标签有以下常用属性: 小结 <froeach> <foreach>标签有以下常用属性: collection:指定要迭代的集合或数组的参数名(遍历的对象)。item:指定在迭代过程中的每个元素的别名(遍历…...

VUE框架:vue2转vue3全面细节总结(3)路由组件传参
大家好,我是csdn的博主:lqj_本人 这是我的个人博客主页: lqj_本人_python人工智能视觉(opencv)从入门到实战,前端,微信小程序-CSDN博客 最新的uniapp毕业设计专栏也放在下方了: https://blog.csdn.net/lbcy…...

音视频技术开发周刊 | 305
每周一期,纵览音视频技术领域的干货。 新闻投稿:contributelivevideostack.com。 大神回归学界:何恺明宣布加入 MIT 「作为一位 FAIR 研究科学家,我将于 2024 年加入麻省理工学院(MIT)电气工程与计算机科学…...

vue 图片base64转化
import html2canvas from ‘html2canvas’ html2canvas(canvasDom, options).then(canvas > { //此时的图片是base64格式的,我们将图片格式转换一下 let type ‘png’; let imgData canvas.toDataURL(type); // 照片格式处理 let _fixType function(type) { …...

TS学习03-类
类 calss A {name: stringconstructor(name:string) {this.name name}greet() {return hello, this.name} } let people new A(RenNing)继承 子类是一个派生类,他派生自父类(基类),通过 extends关键字 派生类通常被称作 子类…...
FastAPI(七)应用配置
目录 一、在apps下新建文件夹config 二、新建配置文件app_conf.py 一、在apps下新建文件夹config 二、新建配置文件app_conf.py from functools import lru_cachefrom pydantic.v1 import BaseSettingsclass AppConfig(BaseSettings):app_name: str "Windows10 插件&qu…...
eclipse Java Code_Style Code_Templates
Preferences - Java - Code Style - Code Templates Eclipse [Java_Code_Style_Code_Templates_ZengWenFeng] 2023.08.07.xml 创建一个新的工程,不然有时候不生效,旧项目可能要重新导入eclipse 创建一个测试类试一试 所有的设置都生效了...
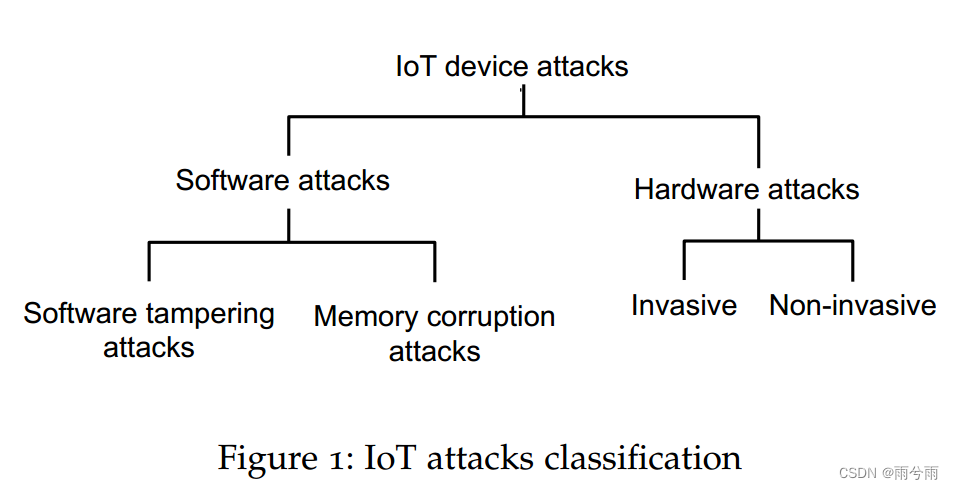
01《Detecting Software Attacks on Embedded IoT Devices》随笔
2023.08.05 今天读的是一篇博士论文 论文传送门:Detecting Software Attacks on Embedded IoT Devices 看了很长时间,发现有一百多页,没看完,没看到怎么实现的。 摘要 联网设备的增加使得嵌入式设备成为各种网络攻击的诱人目标&…...
APP外包开发的学习流程
学习iOS App的开发是一项有趣和富有挑战性的任务,是一个不断学习和不断进步的过程。掌握基础知识后,不断实践和尝试新的项目将使您的技能不断提升。下面和大家分享一些建议,可以帮助您开始学习iOS App的开发。北京木奇移动技术有限公司&#…...

第0章 环境搭建汇总
mini商城第0章 环境搭建汇总 本文是整个mini商城的前置文档,所有用到的技术安装都在本篇文档中有详细描述。所有软件安装不分先后顺序,只是作为一个参考文档,需要用到什么技术软件,就按照文档安装什么软件,切不可一上来全部安装一遍。 文章中有些截图中服务器地址是192.16…...

大数据培训课程-《机器学习从入门到精通》上新啦
《机器学习从入门到精通》课程是一门专业课程,面向人工智能技术服务,课程系统地介绍了Python编程库、分类、回归、无监督学习和模型使用技巧以及算法和案例充分融合。 《机器学习从入门到精通》课程亮点: 课程以任务为导向,逐步学…...
暗黑版GPT流窜暗网 降低犯罪门槛
随着AIGC应用的普及,不法分子利用AI技术犯罪的手段越来越高明,欺骗、敲诈、勒索也开始与人工智能沾边。 近期,专为网络犯罪设计的“暗黑版GPT”持续浮出水面,它们不仅没有任何道德界限,更没有使用门槛,没有…...

数电与Verilog基础知识之同步和异步、同步复位与异步复位
同步和异步是两种不同的处理方式,它们的区别主要在于是否需要等待结果。同步是指一个任务在执行过程中,必须等待上一个任务完成后才能继续执行下一个任务;异步是指一个任务在执行过程中,不需要等待上一个任务完成,可以…...
JAVA Android 正则表达式
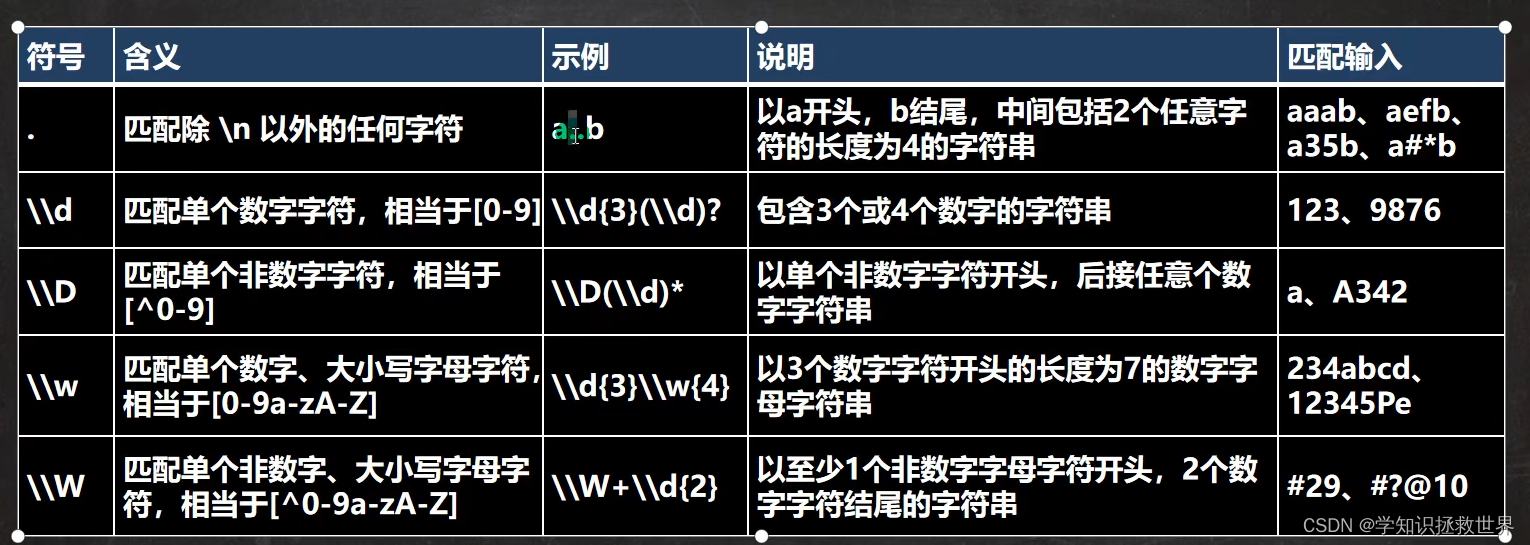
正则表达式 正则表达式是对字符串执行模式匹配的技术。 正则表达式匹配流程 private void RegTheory() {// 正则表达式String content "1998年12月8日,第二代Java平台的企业版J2EE发布。1999年6月,Sun公司发布了第二代Java平台(简称为Java2) &qu…...

【MFC】07.MFC第三大机制:消息映射-笔记
本专栏上两篇文章分别介绍了【MFC】05.MFC第一大机制:程序启动机制和【MFC】06.MFC第二大机制:窗口创建机制,这篇文章来为大家介绍MFC的第三大机制:消息映射 typfd要实现消息映射,必须满足的三个条件: 类必…...

【jvm】jvm的生命周期
目录 一、启动二、执行三、退出 一、启动 1.java虚拟机的启动是通过引导类加载器bootstrap class loader创建一个初始类(initial class)来完成的,这个类是由虚拟机的具体实现指定的(根据具体虚拟机的类型) 二、执行 1.一个运行中的java虚拟机…...

激光雷达测距和摄像头联合棋盘格反射率标定板
目前,激光雷达不仅在军事上起到了重要的作用,而且发挥其测程大、精度高、反应速度快、可靠性高等优点,在商业领域应用越来越广,发展越来越迅速,具有较高的实用价值和商业价值。车载三维成像激光雷达采用脉冲式测量原理…...

【Docker】docker镜像+nginx部署vue项目:
文章目录 一、文档:二、打包vue项目:三、配置nginx:四、配置Dockerfile:五、构建镜像:六、运行容器:七、最终效果: 一、文档: 【1】菜鸟教程:https://www.runoob.com/do…...

LAMEJS:革新性浏览器端MP3编码全链路解决方案
LAMEJS:革新性浏览器端MP3编码全链路解决方案 【免费下载链接】lamejs mp3 encoder in javascript 项目地址: https://gitcode.com/gh_mirrors/la/lamejs 在实时音视频通信、在线教育录播、移动端音频创作等场景中,传统音频处理依赖服务器端转码导…...

MCP SDK性能衰减真相:跨语言序列化耗时飙升370%的4个隐蔽根源及优化对照表
第一章:MCP跨语言SDK性能衰减问题全景认知MCP(Microservice Communication Protocol)跨语言SDK在多语言微服务协同场景中广泛部署,但实践中普遍观测到显著的性能衰减现象——相同逻辑在Go原生实现中耗时约0.8ms,而经Py…...

Phi-3-Mini-128K入门必看:streaming=True对长文本生成体验的提升
Phi-3-Mini-128K入门必看:streamingTrue对长文本生成体验的提升 1. 工具概览 Phi-3-Mini-128K是基于微软Phi-3-mini-128k-instruct模型开发的轻量化对话工具,专为本地部署和高效推理优化。这个工具严格遵循官方推荐规范,通过多项技术创新解…...

通义千问1.5-1.8B-Chat-GPTQ-Int4与MATLAB联动:科学计算问题求解与可视化建议
通义千问1.5-1.8B-Chat-GPTQ-Int4与MATLAB联动:科学计算问题求解与可视化建议 想象一下这个场景:你正在处理一组复杂的实验数据,脑海里已经有了一个清晰的分析思路和可视化方案,但要把这个想法转化成一行行精确的MATLAB代码&…...

Asian Beauty Z-Image Turbo 模型压缩与加速:在边缘设备部署的探索
Asian Beauty Z-Image Turbo 模型压缩与加速:在边缘设备部署的探索 最近几年,AI图像生成模型的发展速度,快得有点让人跟不上。从最初的模糊涂鸦,到现在能生成以假乱真的高清人像、风景,效果确实惊艳。但不知道你有没有…...

Qwen3-ASR-0.6B多场景落地:支持API服务化、桌面客户端、Web嵌入三类部署形态
Qwen3-ASR-0.6B多场景落地:支持API服务化、桌面客户端、Web嵌入三类部署形态 1. 项目简介与核心价值 Qwen3-ASR-0.6B是基于阿里云通义千问团队开源语音识别模型开发的本地智能语音转文字工具。这个工具最大的特点是完全在本地运行,不需要联网ÿ…...

Qwen-Ranker Pro行业方案:教育领域知识库智能检索系统
Qwen-Ranker Pro行业方案:教育领域知识库智能检索系统 1. 引言 教育机构每天都要面对海量的教学资源:课件、教案、习题库、学术论文、教学视频……老师们经常为找一个合适的教学案例花上半天时间,学生们为了查一个知识点要翻遍各种资料。传…...

攻克网页媒体资源获取难题:从技术原理到实战指南
攻克网页媒体资源获取难题:从技术原理到实战指南 【免费下载链接】cat-catch 猫抓 chrome资源嗅探扩展 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 在数字化时代,网页媒体资源获取已成为内容创作者、教育工作者和普通用户的核心…...

突破iOS封闭限制:WeChatExporter的微信聊天记录全攻略
突破iOS封闭限制:WeChatExporter的微信聊天记录全攻略 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter iOS系统的封闭性让微信聊天记录备份成为困扰用户的技术…...

MTT S80在Ubuntu20.04.6下的性能监控与优化:从驱动安装到资源查看
MTT S80在Ubuntu 20.04.6下的深度性能调优指南 开篇:为什么需要关注MTT S80的性能监控? 当你把MTT S80显卡装进Ubuntu系统的那一刻,真正的挑战才刚刚开始。这张国产高性能显卡在Linux环境下展现出的潜力令人兴奋,但同时也带来了独…...