【PCL-6】PCL基于凹凸型的分割算法(LCCP)
凹凸型分割算法适用于颜色类似、棱角分明的物体场景分割。LCCP方法不依赖点云颜色,只使用空间信息和法线信息。
算法流程:
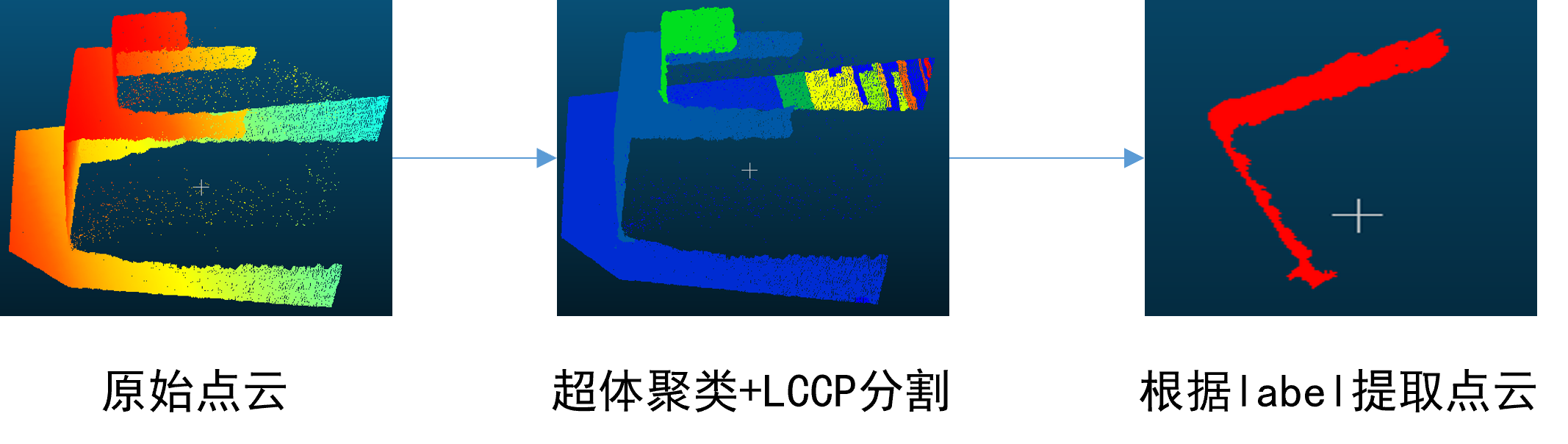
1、基于超体聚类的过分割;
2、在超体聚类的基础上再聚类。
算法思路:
1、基于CC和SC判断凹凸性,CC是利用相邻两片中心连线向量与法向量的夹角来判断两片是凹还是凸,SC判别阈值与两体素的夹角。
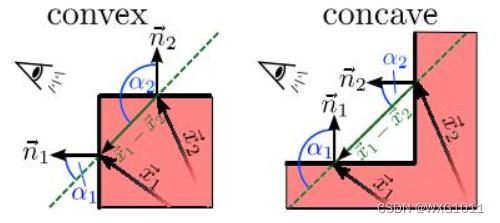
若α1>α2,则为凹,反之,则为凸。
2、在标记完各个小区域凹凸关系后,则采用区域增长算法将小区域聚类成较大物体。
3、滤除多余噪点,即可获得点云分割结果。
示例代码:
//超体聚类+LCCP
//#include "stdafx.h"#include <stdlib.h>
#include <cmath>
#include <limits.h>
#include <boost/format.hpp>
#include <fstream> #include <pcl/console/parse.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/visualization/point_cloud_color_handlers.h>
#include <pcl/visualization/cloud_viewer.h>#include <pcl/filters/passthrough.h>
#include <pcl/segmentation/supervoxel_clustering.h> #include <pcl/segmentation/lccp_segmentation.h> #define Random(x) (rand() % x)typedef pcl::PointXYZRGBA PointT;
typedef pcl::LCCPSegmentation<PointT>::SupervoxelAdjacencyList SuperVoxelAdjacencyList;int main(int argc, char ** argv)
{//输入点云 pcl::PointCloud<PointT>::Ptr input_cloud_ptr(new pcl::PointCloud<PointT>);pcl::PCLPointCloud2 input_pointcloud2;if (pcl::io::loadPCDFile("E:\\PercipioVision\\depth2pointcloud\\testdata\\test-Cloud1.pcd", input_pointcloud2)){PCL_ERROR("ERROR: Could not read input point cloud ");return (3);}pcl::fromPCLPointCloud2(input_pointcloud2, *input_cloud_ptr);PCL_INFO("Done making cloud\n");//粒子距离,体素大小,空间八叉树的分辨率,类kinect或xtion获取的数据,0.008左右合适float voxel_resolution = 2.0f;//晶核距离,种子的分辨率,一般可设置为体素分辨率的50倍以上float seed_resolution = 100.0f;//颜色容差,针对分割场景,如果分割场景中各个物体之间的颜色特征差异明显,可设置较大float color_importance = 0.1f;//设置较大且其他影响较小时,基本按照空间分辨率来决定体素分割float spatial_importance = 1.0f;//针对分割场景,如果分割场景中各个物体连通处的法线特征差异明显,可设置较大,//但在实际使用中,需要针对数据的结构适当考虑,发现估计的准确性等因素float normal_importance = 4.0f;bool use_single_cam_transform = false;bool use_supervoxel_refinement = false;unsigned int k_factor = 0;//voxel_resolution is the resolution (in meters) of voxels used、seed_resolution is the average size (in meters) of resulting supervoxels pcl::SupervoxelClustering<PointT> super(voxel_resolution, seed_resolution);super.setUseSingleCameraTransform(use_single_cam_transform);super.setInputCloud(input_cloud_ptr);//Set the importance of color for supervoxels. super.setColorImportance(color_importance);//Set the importance of spatial distance for supervoxels.super.setSpatialImportance(spatial_importance);//Set the importance of scalar normal product for supervoxels. super.setNormalImportance(normal_importance);std::map<uint32_t, pcl::Supervoxel<PointT>::Ptr> supervoxel_clusters;PCL_INFO("Extracting supervoxels\n");super.extract(supervoxel_clusters);PCL_INFO("Getting supervoxel adjacency\n");std::multimap<uint32_t, uint32_t> supervoxel_adjacency;super.getSupervoxelAdjacency(supervoxel_adjacency);pcl::PointCloud<pcl::PointNormal>::Ptr sv_centroid_normal_cloud = pcl::SupervoxelClustering<PointT>::makeSupervoxelNormalCloud(supervoxel_clusters);//LCCP分割float concavity_tolerance_threshold = 20;float smoothness_threshold = 0.2;uint32_t min_segment_size = 0;bool use_extended_convexity = false;bool use_sanity_criterion = false;PCL_INFO("Starting Segmentation\n");pcl::LCCPSegmentation<PointT> lccp;//设置CC判断的依据lccp.setConcavityToleranceThreshold(concavity_tolerance_threshold);//设置是否使用阶梯检测,这个条件会检测两个超体素之间是否是一个step。//如果两个超体素之间的面到面距离>expected_distance + smoothness_threshold_*voxel_resolution_则这个两个超体素被判定为unsmooth并被标记为凹。lccp.setSmoothnessCheck(true, voxel_resolution, seed_resolution, smoothness_threshold);//设置CC判断中公共距离被判定为凸的个数lccp.setKFactor(k_factor);//输入超体分割后的点云lccp.setInputSupervoxels(supervoxel_clusters, supervoxel_adjacency);lccp.setMinSegmentSize(min_segment_size);lccp.segment();PCL_INFO("Interpolation voxel cloud -> input cloud and relabeling\n");pcl::PointCloud<pcl::PointXYZL>::Ptr sv_labeled_cloud = super.getLabeledCloud();pcl::PointCloud<pcl::PointXYZL>::Ptr lccp_labeled_cloud = sv_labeled_cloud->makeShared();lccp.relabelCloud(*lccp_labeled_cloud);SuperVoxelAdjacencyList sv_adjacency_list;lccp.getSVAdjacencyList(sv_adjacency_list);// 根据label值提取点云int j = 0;pcl::PointCloud<pcl::PointXYZL>::Ptr ColoredCloud2(new pcl::PointCloud<pcl::PointXYZL>);ColoredCloud2->height = 1;ColoredCloud2->width = lccp_labeled_cloud->size();ColoredCloud2->resize(lccp_labeled_cloud->size());for (int i = 0; i < lccp_labeled_cloud->size(); i++) {if (lccp_labeled_cloud->points[i].label == 3) {ColoredCloud2->points[j].x = lccp_labeled_cloud->points[i].x;ColoredCloud2->points[j].y = lccp_labeled_cloud->points[i].y;ColoredCloud2->points[j].z = lccp_labeled_cloud->points[i].z;ColoredCloud2->points[j].label = lccp_labeled_cloud->points[i].label;j++;}}pcl::io::savePCDFileASCII("E:\\PercipioVision\\depth2pointcloud\\testdata\\3.pcd", *ColoredCloud2);// Configure Visualizer//pcl::visualization::PCLVisualizer viewer = pcl::visualization::PCLVisualizer("3D Viewer", false);//viewer.addPointCloud(lccp_labeled_cloud, "Segmented point cloud");pcl::io::savePCDFileASCII("E:\\PercipioVision\\depth2pointcloud\\testdata\\分割后合并.pcd", *lccp_labeled_cloud);return 0;
}
相关文章:
【PCL-6】PCL基于凹凸型的分割算法(LCCP)
凹凸型分割算法适用于颜色类似、棱角分明的物体场景分割。LCCP方法不依赖点云颜色,只使用空间信息和法线信息。 算法流程: 1、基于超体聚类的过分割; 2、在超体聚类的基础上再聚类。 算法思路: 1、基于CC和SC判断凹凸性&…...

多进程并发服务器
文章目录 思路问题多进程并发回环服务器代码客户端代码 思路 每当一个客户端连接服务器后,创建一个子进程负责与该客户端通信,客户端断开连接之后,服务器回收子进程资源。 问题 问题1:父进程阻塞在等待连接(accept())处…...

2021秋招总结
2021 秋招总结 作为星球第一批准备秋招的人,经过这几个月的面试之后,感觉也算是有一些小小的经验了吧,就做一个简单的记录,希望能够为星球中准备秋招的伙伴们提供一些参考吧~ 序 4月初加入星球,到9月底,一…...
Linux6.34 Kubernetes yaml文件详解
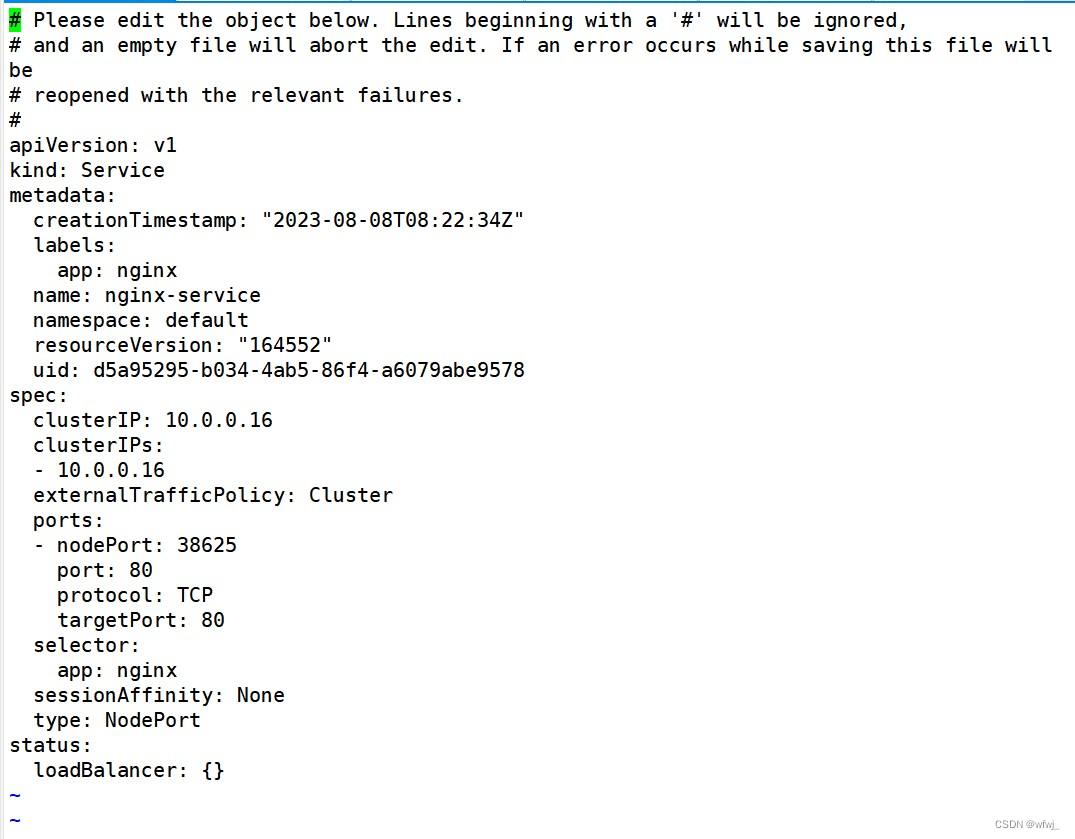
文章目录 计算机系统5G云计算第三章 LINUX Kubernetes yaml文件详解一、yaml文件概述1.查看 api 资源版本标签2.写一个yaml文件demo 计算机系统 5G云计算 第三章 LINUX Kubernetes yaml文件详解 一、yaml文件概述 Kubernetes 支持 YAML 和 JSON 格式管理资源对象 JSON 格式…...

防火墙笔记
什么是防火墙 在计算机网络中是指设置在可信任的内部网络和不可信任的外部网络之间的屏障,通过强化边界控制保障内容安全,同时不妨碍内部对外部的访问。 20世纪80年代,最早的防火墙几乎与路由器同时出现,第一代防火墙主要基于包过…...

使用代码下载开源的大模型文件示例以及中文微调llama资源汇总:
一、下载示例 from huggingface_hub import snapshot_downloadrepo_id "THUDM/chatglm2-6b" local_dir ./chatglm2-6b/ cache_dir local_dir "/cache" while True:try:snapshot_download(cache_dircache_dir,local_dirlocal_dir,repo_idrepo_id,loca…...

Wav2vec2 论文阅读看到的一些问题
Wav2vec2 论文阅读看到的一些问题 这里只是简单的思考一下论文的一些问题,不是论文解读。 Q1. 为什么wav2vec依旧需要Transformer来做推理,而不直接使用VQ生成的内容? A1. Transformer在更长的序列上有更好的编码效果,例如论文也写…...
爬虫学习记录(持续更新)
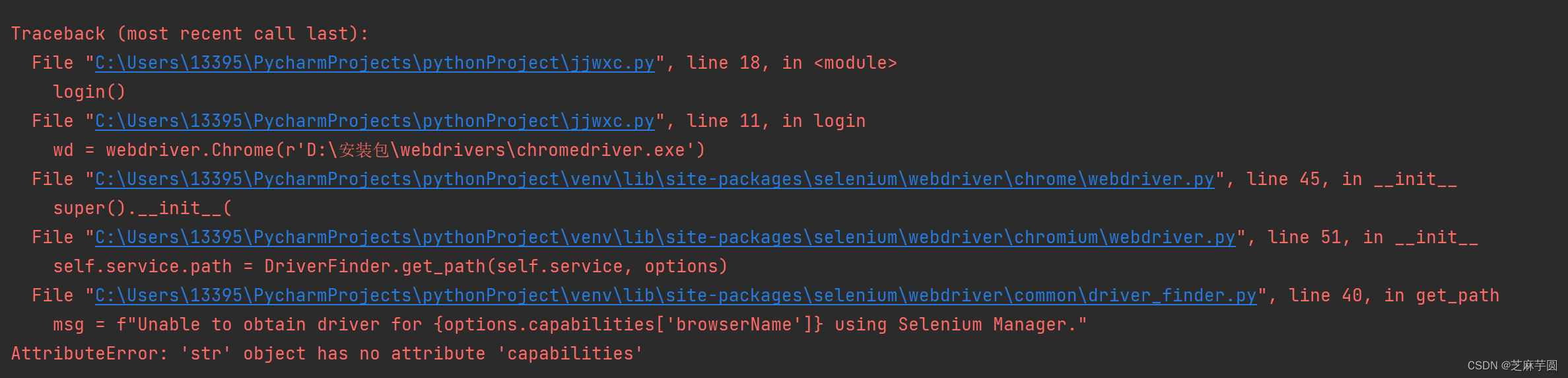
一、问题记录 1.使用webdriver报错AttributeError: str object has no attribute capabilities 解决:目前使用的selenium版本是4.11.2,可以不必设置driver.exe的路径,selenium可以自己处理浏览器和驱动程序,因此,使用…...

libevent源码学习1---创建event
libevent源码学习1—创建event Libevent是一个用于开发可扩展性网络服务器的基于事件驱动(event-driven)模型的非阻塞网络库。安装请参考ubuntu下载安装libevent event_base 使用 libevent 函数之前需要分配一个或者多个 event_base 结构体。每个 event_base 结构体持有一个…...

Python类的设计
Python类的设计 # 定义一个闹钟类 class Clock:__cureen_keyNone # 私有成员不能改变和使用def __init__(self, id, price): # 类对象是立即自动执行self.id idself.price pricedef ring(self):import winsound # 内置声音方法winsound.Beep(2000,3000)clock1 Clock(…...
微信小程序的项目解构
视频链接 黑马程序员前端微信小程序开发教程,微信小程序从基础到发布全流程_企业级商城实战(含uni-app项目多端部署)_哔哩哔哩_bilibili 接口文档 https://www.escook.cn/docs-uni-shop/mds/1.start.html 1:微信小程序宿主环境 1:常见的宿…...

【Archaius技术专题】「Netflix原生态」动态化配置服务之微服务配置组件变色龙
前提介绍 如果要设计开发一套微服务基础架构,参数化配置是一个非常重要的点,而Netflix也开源了一个叫变色龙Archaius的配置中心客户端,而且Archaius可以说是比其他客户端具备更多生产级特性,也更灵活。*在NetflixOSS微服务技术栈…...

python条件分支和循环语句
python中没有{}的写法,一般时通过缩进的方式来确定分支和循环需要执行的代码块。 if 需要判断的条件表达式:条件成立时的动作 elif 需要判断的条件表达式:条件成立时的动作 else:动作for 变量 in 迭代对象:动作 示例: while 退出条件:动作...
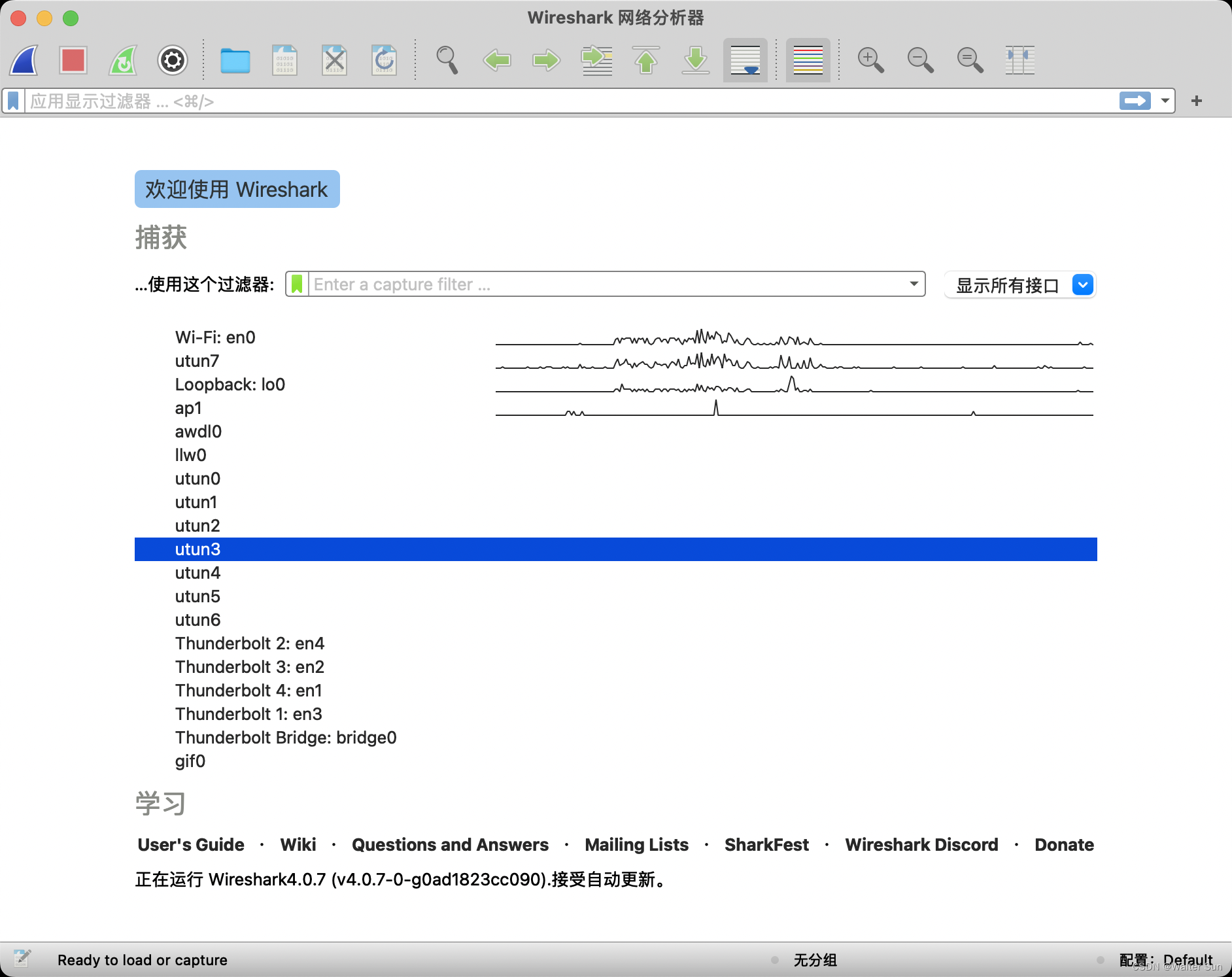
工具推荐:Wireshark网络协议分析工具(对比tcpdump)
文章首发地址 Wireshark是一款开源的网络协议分析工具,可以捕获网络数据包并对其进行详细的分析和解释。下面是Wireshark的详细介绍: Wireshark 工作原理 Wireshark通过捕获网络接口上的数据包,将其转换为可读的格式,并在界面…...
[OnWork.Tools]系列 04-快捷启动
简介 主要功能是将常用的软件拖动到软件中,实现快速点击启动,结合软件设置中的设置的快捷键,可以快速呼出对应的面板,使用快捷键快速启动应用 拖拽内容 拖拽快捷方式到面板,双击快速打开 拖拽文件方式到面板,双击快速打开 拖拽文件夹到面板双击快速打开 拖拽项目调整顺序 右…...

如何将项目挂后台运行?【nohup和tmux】
挂后台运行,防止霸屏。 线上的程序不会将日志输出到控制台,而是输出到日志文件,方便运维查阅信息。 一.nohup--挂后台运行的命令 //nohup--英文全称no hang up,可以后台运行指定命令 //hello.log是指将日志输出到hello.log文件 …...
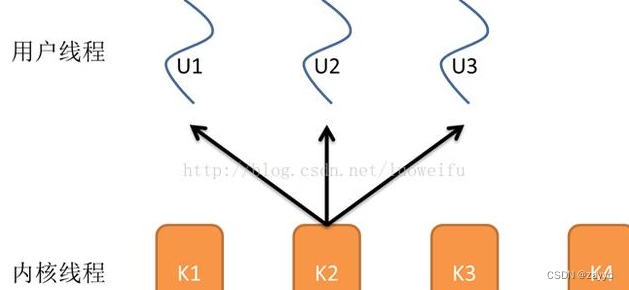
什么是进程、线程、协程
什么是进程? 我们都知道计算机的核心是CPU,它承担了所有的计算任务;而操作系统是计算机的管理者,它负责任务的调度、资源的分配和管理,统领整个计算机硬件;应用程序则是具有某种功能的程序,程序…...

Python爬虫——selenium_访问元素信息
from selenium import webdriver# 创建浏览器对象 path files/chromedriver.exe browser webdriver.Chrome(path)# 访问地址 url https://www.baidu.com browser.get(url)input browser.find_element_by_id(su)获取元素属性 .get_attribute(class)print(input.get_attribu…...
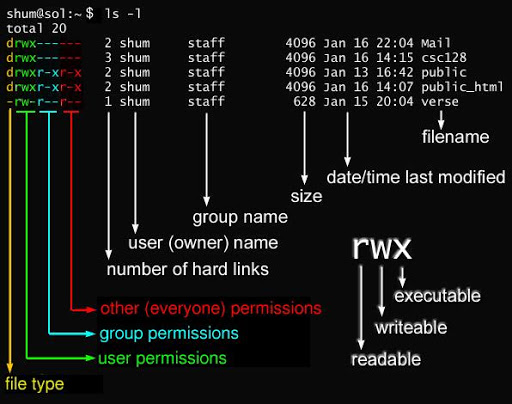
Linux 文件基本属性
Linux 文件基本属性 Linux 系统是一种典型的多用户系统,不同的用户处于不同的地位,拥有不同的权限。 为了保护系统的安全性,Linux 系统对不同的用户访问同一文件(包括目录文件)的权限做了不同的规定。 在 Linux 中我…...

CSS 盒模型是什么?它包含哪些属性?标准盒模型/怪异盒模型
聚沙成塔每天进步一点点 ⭐ 专栏简介⭐ 盒模型⭐ 标准盒模型⭐ 怪异盒模型⭐ 写在最后 ⭐ 专栏简介 前端入门之旅:探索Web开发的奇妙世界 记得点击上方或者右侧链接订阅本专栏哦 几何带你启航前端之旅 欢迎来到前端入门之旅!这个专栏是为那些对Web开发感…...

使用docker在3台服务器上搭建基于redis 6.x的一主两从三台均是哨兵模式
一、环境及版本说明 如果服务器已经安装了docker,则忽略此步骤,如果没有安装,则可以按照一下方式安装: 1. 在线安装(有互联网环境): 请看我这篇文章 传送阵>> 点我查看 2. 离线安装(内网环境):请看我这篇文章 传送阵>> 点我查看 说明:假设每台服务器已…...

ES6从入门到精通:前言
ES6简介 ES6(ECMAScript 2015)是JavaScript语言的重大更新,引入了许多新特性,包括语法糖、新数据类型、模块化支持等,显著提升了开发效率和代码可维护性。 核心知识点概览 变量声明 let 和 const 取代 var…...

什么是库存周转?如何用进销存系统提高库存周转率?
你可能听说过这样一句话: “利润不是赚出来的,是管出来的。” 尤其是在制造业、批发零售、电商这类“货堆成山”的行业,很多企业看着销售不错,账上却没钱、利润也不见了,一翻库存才发现: 一堆卖不动的旧货…...
微信小程序 - 手机震动
一、界面 <button type"primary" bindtap"shortVibrate">短震动</button> <button type"primary" bindtap"longVibrate">长震动</button> 二、js逻辑代码 注:文档 https://developers.weixin.qq…...

Linux云原生安全:零信任架构与机密计算
Linux云原生安全:零信任架构与机密计算 构建坚不可摧的云原生防御体系 引言:云原生安全的范式革命 随着云原生技术的普及,安全边界正在从传统的网络边界向工作负载内部转移。Gartner预测,到2025年,零信任架构将成为超…...
)
论文解读:交大港大上海AI Lab开源论文 | 宇树机器人多姿态起立控制强化学习框架(一)
宇树机器人多姿态起立控制强化学习框架论文解析 论文解读:交大&港大&上海AI Lab开源论文 | 宇树机器人多姿态起立控制强化学习框架(一) 论文解读:交大&港大&上海AI Lab开源论文 | 宇树机器人多姿态起立控制强化…...
的使用)
Go 并发编程基础:通道(Channel)的使用
在 Go 中,Channel 是 Goroutine 之间通信的核心机制。它提供了一个线程安全的通信方式,用于在多个 Goroutine 之间传递数据,从而实现高效的并发编程。 本章将介绍 Channel 的基本概念、用法、缓冲、关闭机制以及 select 的使用。 一、Channel…...
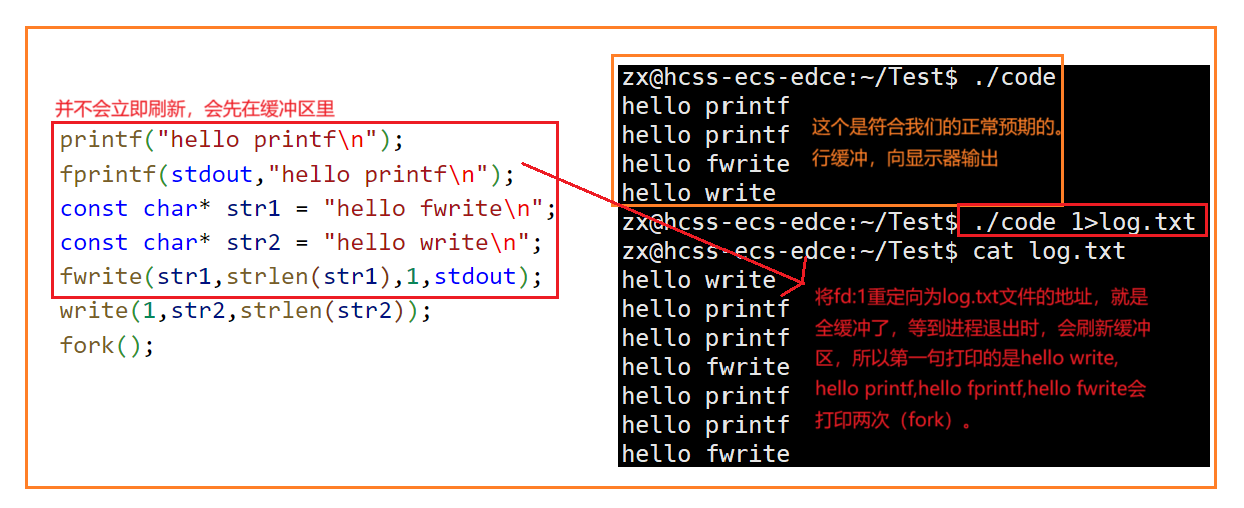
Linux中《基础IO》详细介绍
目录 理解"文件"狭义理解广义理解文件操作的归类认知系统角度文件类别 回顾C文件接口打开文件写文件读文件稍作修改,实现简单cat命令 输出信息到显示器,你有哪些方法stdin & stdout & stderr打开文件的方式 系统⽂件I/O⼀种传递标志位…...

简单介绍C++中 string与wstring
在C中,string和wstring是两种用于处理不同字符编码的字符串类型,分别基于char和wchar_t字符类型。以下是它们的详细说明和对比: 1. 基础定义 string 类型:std::string 字符类型:char(通常为8位)…...

用js实现常见排序算法
以下是几种常见排序算法的 JS实现,包括选择排序、冒泡排序、插入排序、快速排序和归并排序,以及每种算法的特点和复杂度分析 1. 选择排序(Selection Sort) 核心思想:每次从未排序部分选择最小元素,与未排…...