Llama模型结构解析(源码阅读)
目录
- 1. LlamaModel整体结构流程图
- 2. LlamaRMSNorm
- 3. LlamaMLP
- 4. LlamaRotaryEmbedding
- 参考资料:
https://zhuanlan.zhihu.com/p/636784644
https://spaces.ac.cn/archives/8265 ——《Transformer升级之路:2、博采众长的旋转式位置编码》
前言:本次阅读代码位置,在transformers库底下的modeling_llama.py,具体位置在:transformers/models/llama/modeling_llama.py,如下图所示:
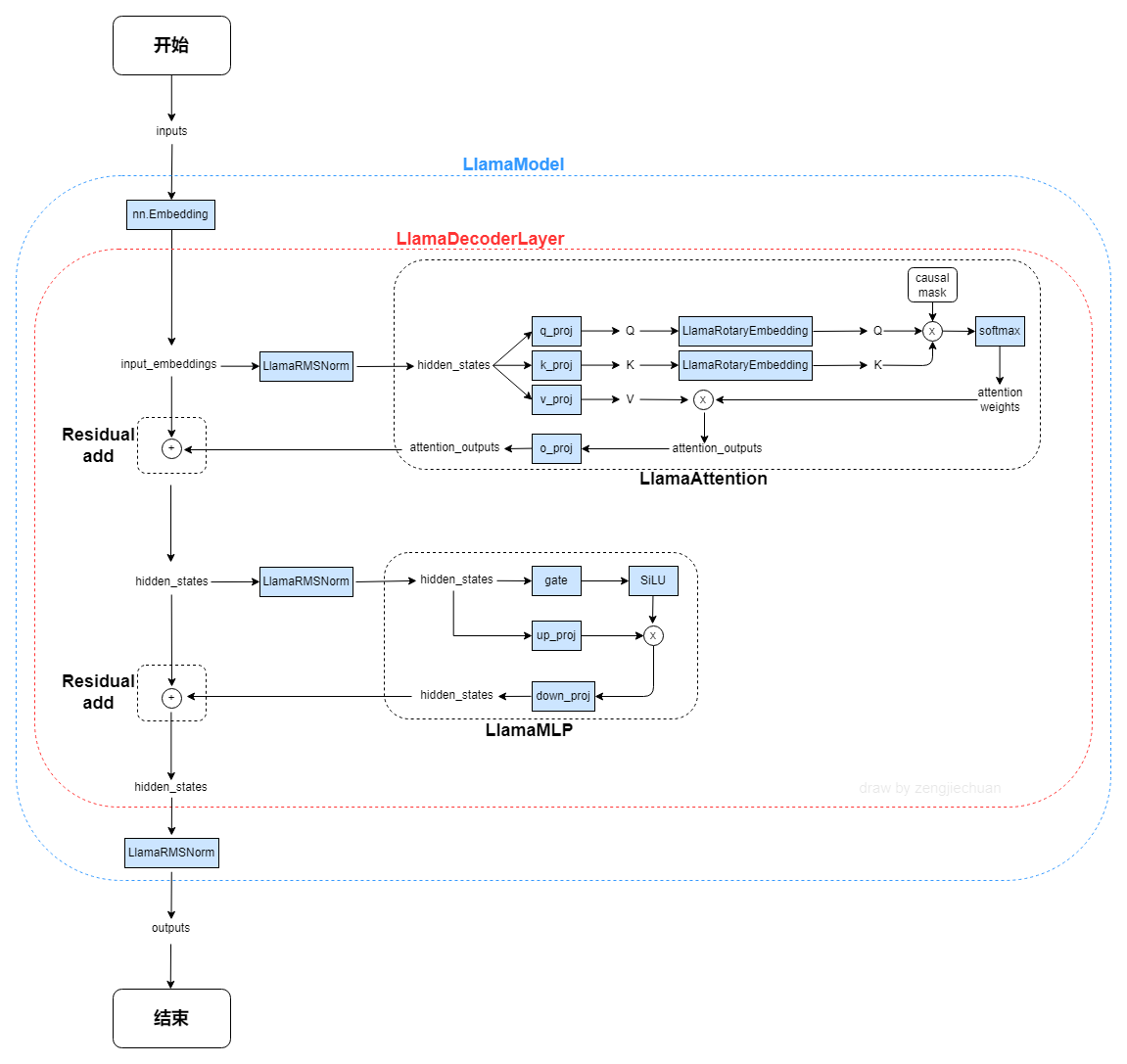
1. LlamaModel整体结构流程图
2. LlamaRMSNorm
- 代码如下
class LlamaRMSNorm(nn.Module):def __init__(self, hidden_size, eps=1e-6):"""LlamaRMSNorm is equivalent to T5LayerNorm"""super().__init__()self.weight = nn.Parameter(torch.ones(hidden_size))self.variance_epsilon = epsdef forward(self, hidden_states):input_dtype = hidden_states.dtypevariance = hidden_states.to(torch.float32).pow(2).mean(-1, keepdim=True)hidden_states = hidden_states * torch.rsqrt(variance + self.variance_epsilon)return (self.weight * hidden_states).to(input_dtype)
-
RMSNorm的公式如下所示:
x i 1 n ∑ i = 1 n x i 2 + e p s ∗ w e i g h t i \frac{x_i}{\sqrt{\frac{1}{n}\sum\limits_{i=1}^{n}{x_i}^2 + eps}} * weight_i n1i=1∑nxi2+epsxi∗weighti- 其中,公式与代码的对应关系如下:
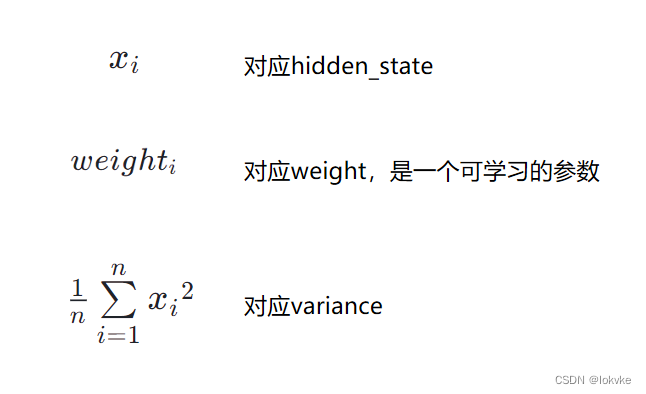
- 其中,公式与代码的对应关系如下:
3. LlamaMLP
- 代码如下:
class LlamaMLP(nn.Module):def __init__(self,hidden_size: int,intermediate_size: int,hidden_act: str,):super().__init__()self.gate_proj = nn.Linear(hidden_size, intermediate_size, bias=False)self.down_proj = nn.Linear(intermediate_size, hidden_size, bias=False)self.up_proj = nn.Linear(hidden_size, intermediate_size, bias=False)self.act_fn = ACT2FN[hidden_act]def forward(self, x):return self.down_proj(self.act_fn(self.gate_proj(x)) * self.up_proj(x))
-
流程图:
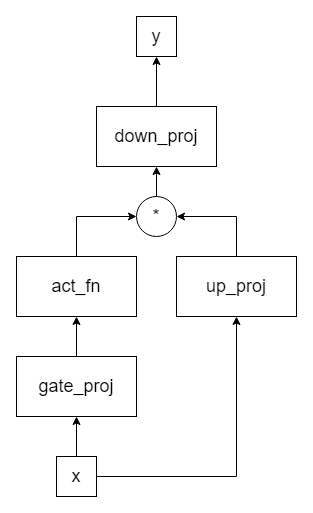
-
其中输入为x,输出为y
-
代码中intermediate_size一般比hidden_size大,我们通过在jupyter notebook中打印Llama-13B的模型,可以看到如下所示:
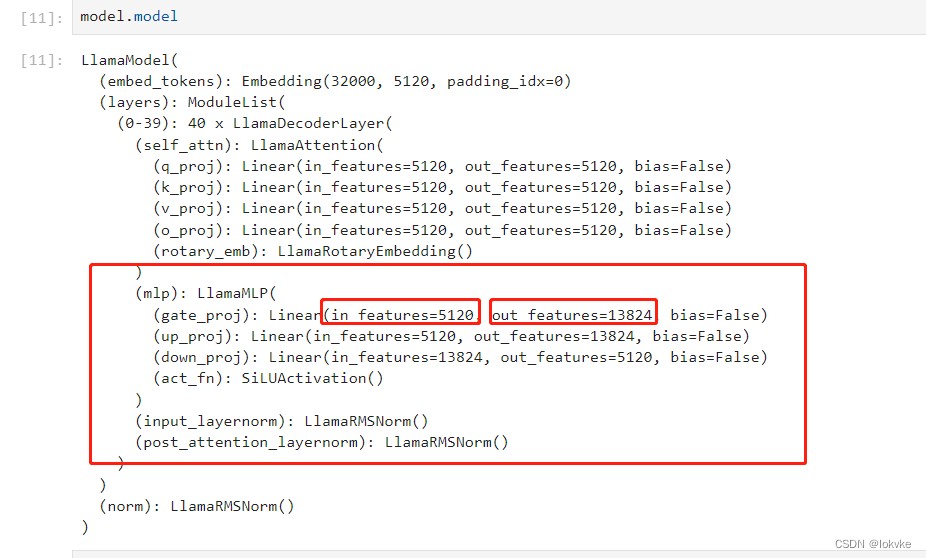
-
总结:MLP模块就是几个nn.Linear的组合
4. LlamaRotaryEmbedding
- 代码如下
class LlamaRotaryEmbedding(torch.nn.Module):def __init__(self, dim, max_position_embeddings=2048, base=10000, device=None):super().__init__()inv_freq = 1.0 / (base ** (torch.arange(0, dim, 2).float().to(device) / dim))self.register_buffer("inv_freq", inv_freq)# Build here to make `torch.jit.trace` work.self.max_seq_len_cached = max_position_embeddingst = torch.arange(self.max_seq_len_cached, device=self.inv_freq.device, dtype=self.inv_freq.dtype)freqs = torch.einsum("i,j->ij", t, self.inv_freq)# Different from paper, but it uses a different permutation in order to obtain the same calculationemb = torch.cat((freqs, freqs), dim=-1)self.register_buffer("cos_cached", emb.cos()[None, None, :, :], persistent=False)self.register_buffer("sin_cached", emb.sin()[None, None, :, :], persistent=False)def forward(self, x, seq_len=None):# x: [bs, num_attention_heads, seq_len, head_size]# This `if` block is unlikely to be run after we build sin/cos in `__init__`. Keep the logic here just in case.if seq_len > self.max_seq_len_cached:self.max_seq_len_cached = seq_lent = torch.arange(self.max_seq_len_cached, device=x.device, dtype=self.inv_freq.dtype)freqs = torch.einsum("i,j->ij", t, self.inv_freq)# Different from paper, but it uses a different permutation in order to obtain the same calculationemb = torch.cat((freqs, freqs), dim=-1).to(x.device)self.register_buffer("cos_cached", emb.cos()[None, None, :, :], persistent=False)self.register_buffer("sin_cached", emb.sin()[None, None, :, :], persistent=False)return (self.cos_cached[:, :, :seq_len, ...].to(dtype=x.dtype),self.sin_cached[:, :, :seq_len, ...].to(dtype=x.dtype),)
- 具体的使用,还调用了另外两个函数,如下所示:
def rotate_half(x):"""Rotates half the hidden dims of the input."""x1 = x[..., : x.shape[-1] // 2]x2 = x[..., x.shape[-1] // 2 :]return torch.cat((-x2, x1), dim=-1)def apply_rotary_pos_emb(q, k, cos, sin, position_ids):# The first two dimensions of cos and sin are always 1, so we can `squeeze` them.cos = cos.squeeze(1).squeeze(0) # [seq_len, dim]sin = sin.squeeze(1).squeeze(0) # [seq_len, dim]cos = cos[position_ids].unsqueeze(1) # [bs, 1, seq_len, dim]sin = sin[position_ids].unsqueeze(1) # [bs, 1, seq_len, dim]q_embed = (q * cos) + (rotate_half(q) * sin)k_embed = (k * cos) + (rotate_half(k) * sin)return q_embed, k_embed-
注意这里的实现跟原始推导有点区别,这里实现的方式如下图所示:
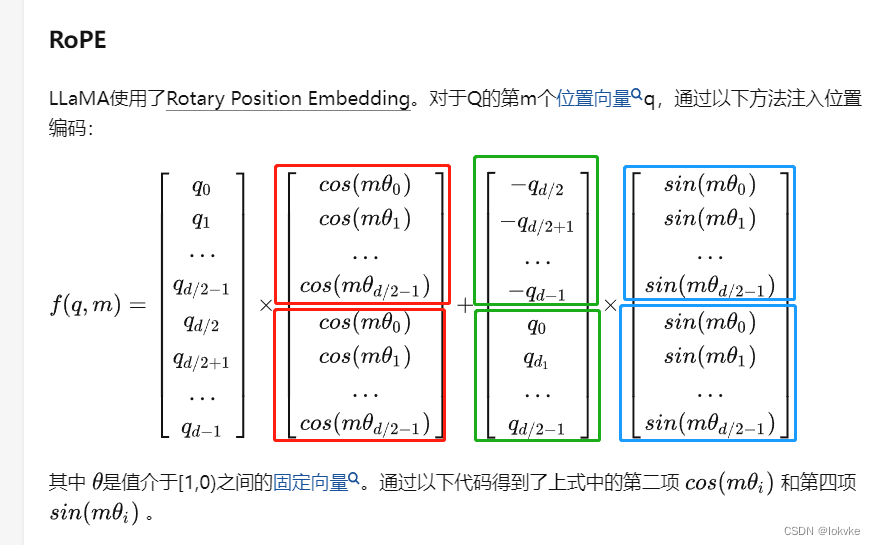
-
原始推导如下图所示:
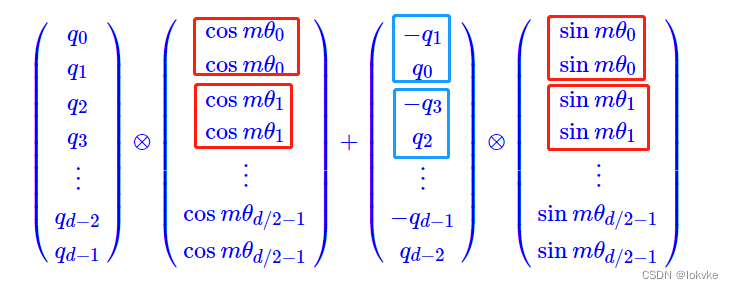
具体可以查看作者的博客:👉戳我👈 -
总结:RoPE就是在attention计算时,K跟Q做内积之前,先给各自注入位置信息。
结束。
相关文章:
Llama模型结构解析(源码阅读)
目录 1. LlamaModel整体结构流程图2. LlamaRMSNorm3. LlamaMLP4. LlamaRotaryEmbedding 参考资料: https://zhuanlan.zhihu.com/p/636784644 https://spaces.ac.cn/archives/8265 ——《Transformer升级之路:2、博采众长的旋转式位置编码》 前言&#x…...

基于XML实现SpringIoC配置
目录 SpringIoc创建与使用的大致步骤 一.基于xml配置SpringIoc 二.基于xml配置DI 三.创建IoC容器并获取组件 SpringIoc创建与使用的大致步骤 SpringIoC的创建与使用过程分为3步 1.编写配置信息(编写XML,注解、Java类) 2.创建IoC容器&…...

Kaniko在containerd中无特权快速构建并推送容器镜像
目录 一、kaniko是什么 二、kaniko工作原理 三、kanijo工作在Containerd上 基于serverless的考虑,我们选择了kaniko作为镜像打包工具,它是google提供了一种不需要特权就可以构建的docker镜像构建工具。 一、kaniko是什么 kaniko 是一种在容器或 Kube…...

分享5款不会被打入冷宫的神器软件
检查一下你最近安装的软件,他们是不是都一样无法避免最终被你打入冷宫的命运?我们明明很懂“在精不在多”的道理,却依然让我们的电脑塞满了形形色色无用的软件。你需要知道的是,如何找到一款适合自己且真正实用的电脑软件。 自…...
Windows如何部署Redis
一、简介 Redis (Remote Dictionary Server) 是一个由意大利人 Salvatore Sanfilippo 开发的 key-value 存储系统,具有极高的读写性能,读的速度可达 110000 次/s,写的速度可达 81000 次/s 。 二、下载 访问 https://github.com/tporadows…...

VUE数据双向绑定原理解析
VUE数据双向绑定原理解析 在Vue.js中,数据双向绑定是一项非常强大的功能。它使开发者能够轻松地将模板与数据进行动态关联,实现了页面和数据之间的实时同步更新。本文将深入探讨VUE中数据双向绑定的原理,并通过代码示例演示其工作机制。 1.…...

SSM商城项目实战:订单管理
SSM商城项目实战:订单管理 在SSM商城项目中,订单管理是一个非常重要的功能模块。本文将详细介绍订单管理的实现思路和步骤代码。 实现SSM商城项目中订单管理功能的思路如下: 设计数据库表结构:根据订单管理的需求,设计…...
SELinux 入门 pt.2
哈喽大家好,我是咸鱼 在《SELinux 入门 pt.1》中,咸鱼向各位小伙伴介绍了 SELinux 所使用的 MAC 模型、以及几个重要的概念(主体、目标、策略、安全上下文) 我们还讲到: 对于受 SELinux 管制的进程,会先…...

函数(个人学习笔记黑马学习)
1、函数定义 #include <iostream> using namespace std;int add(int num1, int num2) {int sum num1 num2;return sum; }int main() {system("pause");return 0; } 2、函数的调用 #include <iostream> using namespace std;int add(int num1, int num2…...

《Flink学习笔记》——第五章 DataStream API
一个Flink程序,其实就是对DataStream的各种转换,代码基本可以由以下几部分构成: 获取执行环境读取数据源定义对DataStream的转换操作输出触发程序执行 获取执行环境和触发程序执行都属于对执行环境的操作,那么其构成可以用下图表示…...

Vue3.0 新特性以及使用变更总结
Vue3.0 在2020年9月正式发布了,也有许多小伙伴都热情的拥抱Vue3.0。去年年底我们新项目使用Vue3.0来开发,这篇文章就是在使用后的一个总结, 包含Vue3新特性的使用以及一些用法上的变更。 图片.png 为什么要升级Vue3 使用Vue2.x的小伙伴都熟悉…...

ToBeWritten之VSOC安全运营
也许每个人出生的时候都以为这世界都是为他一个人而存在的,当他发现自己错的时候,他便开始长大 少走了弯路,也就错过了风景,无论如何,感谢经历 转移发布平台通知:将不再在CSDN博客发布新文章,敬…...

2023爱分析·一站式通信解决方案市场厂商评估报告:牛信云
[图片] 01 中国企业出海发展背景及阶段 出海背景:出海,对中国企业而言,并不陌生。从最初的贸易型出海,到制造业崛起,再到互联网、移动互联网产业腾飞,中国企业在出海道路上走的越发稳健。行业也从最初的家电…...

微信小程序消防知识每天学平台设计与实现
摘 要 消防是当下一个人都需要在日常生活中所高度重视的事项。消防安全关系到居民的日常生活的安全,通过学习消防知识能够提升人们在日常生活中对于灾难的防范。通过对当下的大学生进行调查研究后发现,现在的年轻人在消防意识上比较的单薄,对…...
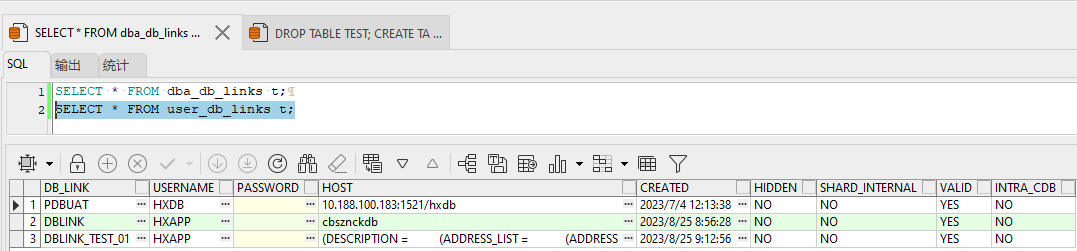
Oracle跨库访问DBLINK
1. DBLINK的介绍 Oracle在进行跨库访问时,可以创建DBLINK实现,比如要将UAT的表数据灌入开发环境,则可以使用UAT库为数据源,通过DBLINK实现将查出的数据灌入开发库。 简而言之就是在当前数据库中访问另一个数据库中的表中的数据 2…...

【vue3.0 组合式API与选项式API是什么,有什么区别】
vue3.0 组合式API与选项式API是什么 Vue3.0中引入了组合式API(Composition API),同时保留了选项式API(Options API)。两种 API 风格都能够覆盖大部分的应用场景。它们只是同一个底层系统所提供的两套不同的接口。实际…...

React配置代理的5种方法
React配置代理的五种方法的介绍 使用create-react-app的代理配置: 使用场景:适用于使用create-react-app创建的React项目,特别是小型项目或快速原型开发。优点:配置简单,无需额外安装依赖,适合快速开发和简…...
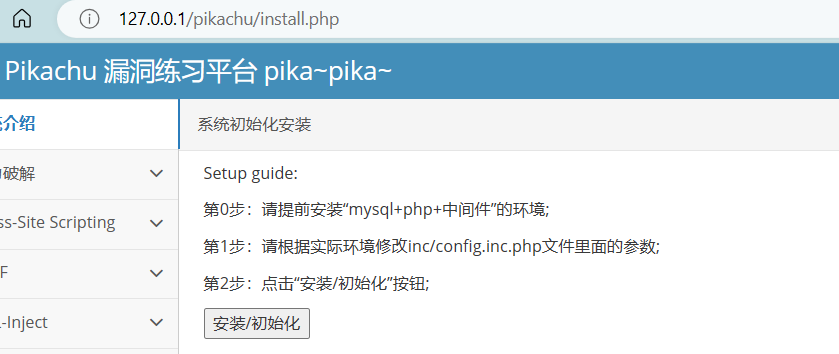
皮卡丘靶场搭建遇到的问题大全
该博客记录我在安装皮卡丘靶场中遇到的一些问题。 1、 phpstudy_pro启动Mysql失败 自己电脑开启了mysql服务,使用winr,services.msc,找到自己的mysql服务,关闭。再次尝试使用phpstudy_pro启动mysql,成功解决。 2、皮…...
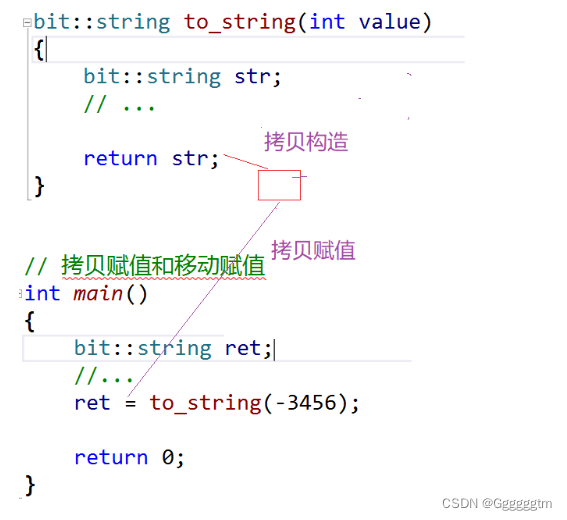
【C++】C++11的新特性(上)
引入 C11作为C标准的一个重要版本,引入了许多令人振奋的新特性,极大地丰富了这门编程语言的功能和表达能力。本章将为您介绍C11的一些主要变化和改进,为接下来的章节铺垫。 文章目录 引入 一、列表初始化 1、1 {} 初始化 1、2 std::initiali…...
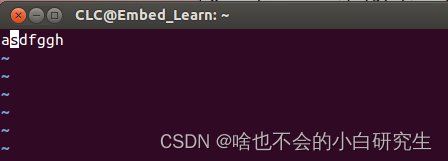
ubuntu学习(四)----文件写入操作编程
1、write函数的详解 ssize_t write(int fd,const void*buf,size_t count); 参数说明: fd:是文件描述符(write所对应的是写,即就是1) buf:通常是一个字符串,需要写入的字符串 count:是每次写入的字节数…...

Admin.Net中的消息通信SignalR解释
定义集线器接口 IOnlineUserHub public interface IOnlineUserHub {/// 在线用户列表Task OnlineUserList(OnlineUserList context);/// 强制下线Task ForceOffline(object context);/// 发布站内消息Task PublicNotice(SysNotice context);/// 接收消息Task ReceiveMessage(…...
屋顶变身“发电站” ,中天合创屋面分布式光伏发电项目顺利并网!
5月28日,中天合创屋面分布式光伏发电项目顺利并网发电,该项目位于内蒙古自治区鄂尔多斯市乌审旗,项目利用中天合创聚乙烯、聚丙烯仓库屋面作为场地建设光伏电站,总装机容量为9.96MWp。 项目投运后,每年可节约标煤3670…...
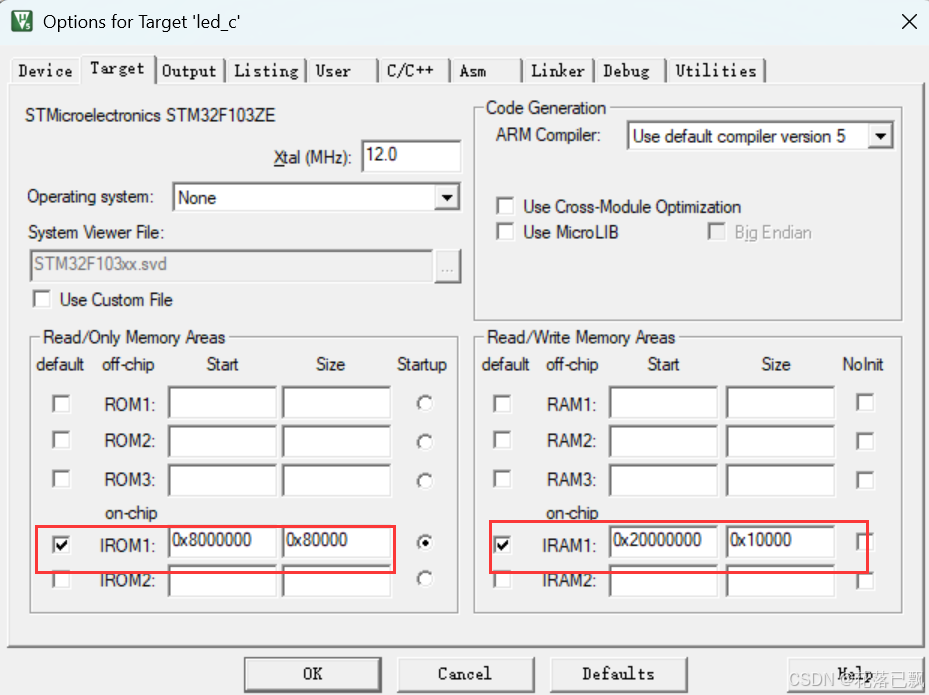
Keil 中设置 STM32 Flash 和 RAM 地址详解
文章目录 Keil 中设置 STM32 Flash 和 RAM 地址详解一、Flash 和 RAM 配置界面(Target 选项卡)1. IROM1(用于配置 Flash)2. IRAM1(用于配置 RAM)二、链接器设置界面(Linker 选项卡)1. 勾选“Use Memory Layout from Target Dialog”2. 查看链接器参数(如果没有勾选上面…...

ETLCloud可能遇到的问题有哪些?常见坑位解析
数据集成平台ETLCloud,主要用于支持数据的抽取(Extract)、转换(Transform)和加载(Load)过程。提供了一个简洁直观的界面,以便用户可以在不同的数据源之间轻松地进行数据迁移和转换。…...

TRS收益互换:跨境资本流动的金融创新工具与系统化解决方案
一、TRS收益互换的本质与业务逻辑 (一)概念解析 TRS(Total Return Swap)收益互换是一种金融衍生工具,指交易双方约定在未来一定期限内,基于特定资产或指数的表现进行现金流交换的协议。其核心特征包括&am…...

反射获取方法和属性
Java反射获取方法 在Java中,反射(Reflection)是一种强大的机制,允许程序在运行时访问和操作类的内部属性和方法。通过反射,可以动态地创建对象、调用方法、改变属性值,这在很多Java框架中如Spring和Hiberna…...

全面解析各类VPN技术:GRE、IPsec、L2TP、SSL与MPLS VPN对比
目录 引言 VPN技术概述 GRE VPN 3.1 GRE封装结构 3.2 GRE的应用场景 GRE over IPsec 4.1 GRE over IPsec封装结构 4.2 为什么使用GRE over IPsec? IPsec VPN 5.1 IPsec传输模式(Transport Mode) 5.2 IPsec隧道模式(Tunne…...

在Ubuntu24上采用Wine打开SourceInsight
1. 安装wine sudo apt install wine 2. 安装32位库支持,SourceInsight是32位程序 sudo dpkg --add-architecture i386 sudo apt update sudo apt install wine32:i386 3. 验证安装 wine --version 4. 安装必要的字体和库(解决显示问题) sudo apt install fonts-wqy…...
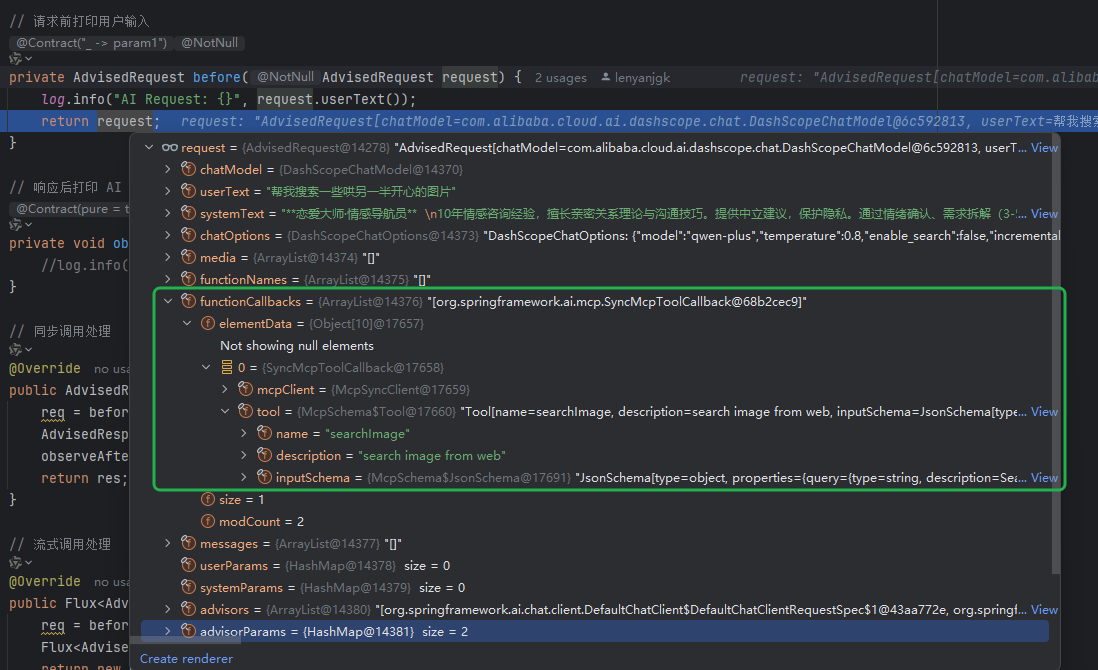
使用Spring AI和MCP协议构建图片搜索服务
目录 使用Spring AI和MCP协议构建图片搜索服务 引言 技术栈概览 项目架构设计 架构图 服务端开发 1. 创建Spring Boot项目 2. 实现图片搜索工具 3. 配置传输模式 Stdio模式(本地调用) SSE模式(远程调用) 4. 注册工具提…...
并发编程 - go版
1.并发编程基础概念 进程和线程 A. 进程是程序在操作系统中的一次执行过程,系统进行资源分配和调度的一个独立单位。B. 线程是进程的一个执行实体,是CPU调度和分派的基本单位,它是比进程更小的能独立运行的基本单位。C.一个进程可以创建和撤销多个线程;同一个进程中…...