halcon双目标定双相机标定
halcon双目标定

*取消更新
dev_update_off ()
*获取窗体句柄
dev_get_window (WindowHandle)
*设置窗体字体样式
set_display_font (WindowHandle, 16, 'mono', 'true', 'false')
*设置线条粗细
dev_set_line_width (3)
*创建空对象
gen_empty_obj (ImageL)
*读取指定文件内子集
list_files ('G:/imageL', ['files','follow_links','recursive'], ImageFiles)
*筛选文件类型
tuple_regexp_select (ImageFiles, ['\\.(tif|tiff|gif|bmp|jpg|jpeg|jp2|png|pcx|pgm|ppm|pbm|xwd|ima|hobj)$','ignore_case'], ImageFiles)
for Index := 0 to |ImageFiles| - 1 by 1*读取图像read_image (Image, ImageFiles[Index])*对象追加concat_obj (ImageL, Image, ImageL)endfor
*创建空对象
gen_empty_obj (ImageR)
*读取指定文件内子集
list_files ('G:/imageR', ['files','follow_links','recursive'], ImageFiles)
*筛选文件类型
tuple_regexp_select (ImageFiles, ['\\.(tif|tiff|gif|bmp|jpg|jpeg|jp2|png|pcx|pgm|ppm|pbm|xwd|ima|hobj)$','ignore_case'], ImageFiles)
for Index := 0 to |ImageFiles| - 1 by 1*读取图像read_image (Image, ImageFiles[Index])*对象追加concat_obj (ImageR, Image, ImageR)
endfor
*暂停程序
stop ()
Cameraparm:=['area_scan_division',0.008,0,3.2e-006,3.2e-006,1024,768,2048,1536]
*创建标定模型
create_calib_data ('calibration_object', 2, 1, CalibDataID)
*设置相机的初始内参
set_calib_data_cam_param (CalibDataID, 'all', [], Cameraparm)
*设置标定板的描述文件
set_calib_data_calib_object (CalibDataID, 0, 'G:/other/双相机标定描述文件.descr')
*对象计算
count_obj (ImageR, Number)
*打开一个窗体
dev_open_window (0, 0, 512, 512, 'black', WindowHandle1)
*打开一个窗体
dev_open_window (50, 50, 512, 512, 'black', WindowHandle2)
IndexL:=0
IndexR:=0
for I := 1 to Number by 1*选择指定条件的对象select_obj (ImageL, ObjectSelectedL, I)*选择指定条件的对象select_obj (ImageR, ObjectSelectedR, I)*查找标定板find_calib_object (ObjectSelectedL, CalibDataID, 0, 0, I, [], [])*查找标定板find_calib_object (ObjectSelectedR, CalibDataID, 1, 0, I, [], [])*获取标定板mark点轮廓get_calib_data_observ_contours (Contours, CalibDataID, 'marks', 0, 0, I)*获取标定板mark点轮廓get_calib_data_observ_contours (Contours1, CalibDataID, 'marks', 1, 0, I)get_calib_data_observ_pose (CalibDataID, 0, 0, I, ObjInCameraPoseL)get_calib_data_observ_pose (CalibDataID, 1, 0, I, ObjInCameraPoseR)*获取标定板姿态和中心行列坐标get_calib_data_observ_points (CalibDataID, 0, 0, I, Row, Column, Index2, Pose)*获取标定板姿态和中心行列坐标get_calib_data_observ_points (CalibDataID, 1, 0, I, Row1, Column1, Index3, Pose1)dev_set_window (WindowHandle1)*显示图像dev_display (ObjectSelectedL)*显示图像dev_display (Contours)*在区域中心点画十字叉gen_cross_contour_xld (Cross, Row, Column, 16, 0.785398)*显示图像dev_display (Cross)*显示3d坐标系disp_3d_coord_system (WindowHandle1, Cameraparm, ObjInCameraPoseL, 0.05)dev_set_window (WindowHandle2)*显示图像dev_display (ObjectSelectedR)*显示图像dev_display (Contours1)*在区域中心点画十字叉gen_cross_contour_xld (Cross1, Row1, Column1, 16, 0.785398)*显示图像dev_display (Cross1)*显示3d坐标系disp_3d_coord_system (WindowHandle2, Cameraparm, ObjInCameraPoseR, 0.05)* stop ()endfor
*暂停程序
stop ()
*反向均方差RMSE
calibrate_cameras (CalibDataID, Error)
*获得camera 内参,calib_obj_pose 外参
get_calib_data (CalibDataID, 'camera', 0, 'params', CameraparmL)
*获得camera 内参,calib_obj_pose 外参
get_calib_data (CalibDataID, 'camera', 1, 'params', CameraparmR)
*获得camera 内参,calib_obj_pose 外参
get_calib_data (CalibDataID, 'camera', 1, 'pose', LHR)
*获得camera 内参,calib_obj_pose 外参
get_calib_data (CalibDataID, 'calib_obj_pose', [0,1], 'pose', LHO1)
*姿态翻转
pose_invert (LHR, RHL)
*姿态相乘
pose_compose (RHL, LHO1, RH01)
dev_set_window (WindowHandle1)
*读取图像
read_image (Image01, 'G:/imageL/image_01.png')
*显示图像
dev_display (Image01)
dev_set_window (WindowHandle2)
*读取图像
read_image (Image02, 'G:/imageR/image_01.png')
*显示图像
dev_display (Image02)
*转世界坐标
image_points_to_world_plane (CameraparmL,LHO1,819, 597, 'm', X, Y)
*转世界坐标
image_points_to_world_plane (CameraparmR, RH01, 976, 1615, 'm', X1, Y1)
*求两个坐标的直线距离
distance_pp (X, Y, X1, Y1, Distance)
*设置窗体字体样式
set_display_font (WindowHandle2, 16, 'mono', 'true', 'false')
*显示文本
disp_message (WindowHandle2, '边长:'+(Distance*1000)$'4.2f'+'mm', 'image', 0, 0, 'red', 'true')相关文章:
halcon双目标定双相机标定
halcon双目标定 *取消更新 dev_update_off () *获取窗体句柄 dev_get_window (WindowHandle) *设置窗体字体样式 set_display_font (WindowHandle, 16, mono, true, false) *设置线条粗细 dev_set_line_width (3) *创建空对象 gen_empty_obj (ImageL) *读取指定文件内子集 li…...
Vue框架学习记录之环境安装与第一个Vue项目
Node.js的安装与配置 首先是Node.js的安装,安装十分简单,只需要去官网下载安装包后,一路next即可。 Node.js是一个开源的、跨平台的 JavaScript 运行时环境 下载地址,有两个版本,一个是推荐的,一个是最新…...
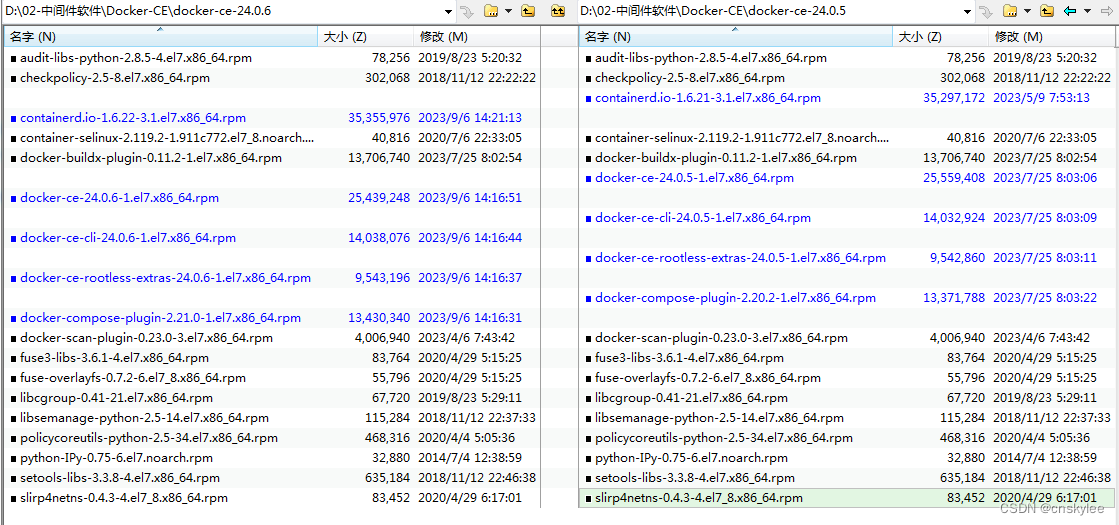
【DockerCE】Docker-CE 24.0.6正式版发布
官网下载地址(For RHEL/CentOS 7.9): https://download.docker.com/linux/centos/7/x86_64/stable/Packages/ 相对于24.0.5版本,本次24.0.6版本更新的rpm包有 5 个,使用目录对比软件对比的结果如下: 在Lin…...

【管理运筹学】第 7 章 | 图与网络分析(1,图论背景以及基本概念、术语、矩阵表示)
文章目录 引言一、图与网络的基本知识1.1 图与网络的基本概念1.1.1 图的定义1.1.2 图中相关术语1.1.3 一些特殊图类1.1.4 图的运算 1.2 图的矩阵表示1.2.1 邻接矩阵1.2.2 可达矩阵1.2.3 关联矩阵1.2.4 权矩阵 写在最后 引言 按照正常进度应该学习动态规划了,但我想…...

支持CAN FD的Kvaser PCIEcan 4xCAN v2编码: 73-30130-01414-5如何应用?
这里是引用 Kvaser PCIEcan 4xCAN v2(编码: 73-30130-01414-5)是一款小巧而先进的多通道实时CAN接口,可发送和接收CAN总线上的标准和扩展CAN消息,时间戳精度高。其与所有使用Kvaser CANlib的应用程序兼容。 主要特性 PCI Express…...

经济2023---风口
改革开放以来,中国共有12次比较好的阶级跃迁的机会: 包括80年代选部委院校、办乡镇企业、倒卖商品;90年代下海、选外语外贸、炒股;00年代从事资源品行业、选金融、炒房;10年代选计算机、搞互联网、买比特币。 从这里…...

JWFD开源工作流-矩阵引擎设计-高维向量空间分析法
JWFD开源工作流-矩阵引擎设计-高维向量空间分析法 在把已知的流程节点查找到之后,输出下标,但是我们发现,还有一些节点并未被 探测到,遍历并没有完全的完成,仍然有泄露的节点在其中,这个问题…...

WIN10访问Ubuntu的Samba
WIN10访问Ubuntu的Samba 在Ubuntu中安装好Samba后,如果无法在Win10里访问共享目录或者无法进行写操作,可以进行如下检查: 检查用户是否添加到共享和共享组 $ sudo adduser yourname sambashare 可以编辑:,查看文件/etc…...

AbstractExecutorService 抽象类
java.util.concurrent.AbstractExecutorService 是 Java 并发编程中的一个抽象类,它定义了 ExecutorService 接口的基本行为。ExecutorService 是一个接口,它提供了一种以异步方式执行任务的方法。 AbstractExecutorService 类包含以下一些重要的方法: void execute(Runnab…...

Android12 ethernet和wifi共存
1.修改网络优先走wifi packages/modules/Connectivity/service/src/com/android/server/connectivity/NetworkRanker.java -44,7 44,7 import java.util.Arrays;import java.util.Collection;import java.util.List;import java.util.function.Predicate; - import andro…...
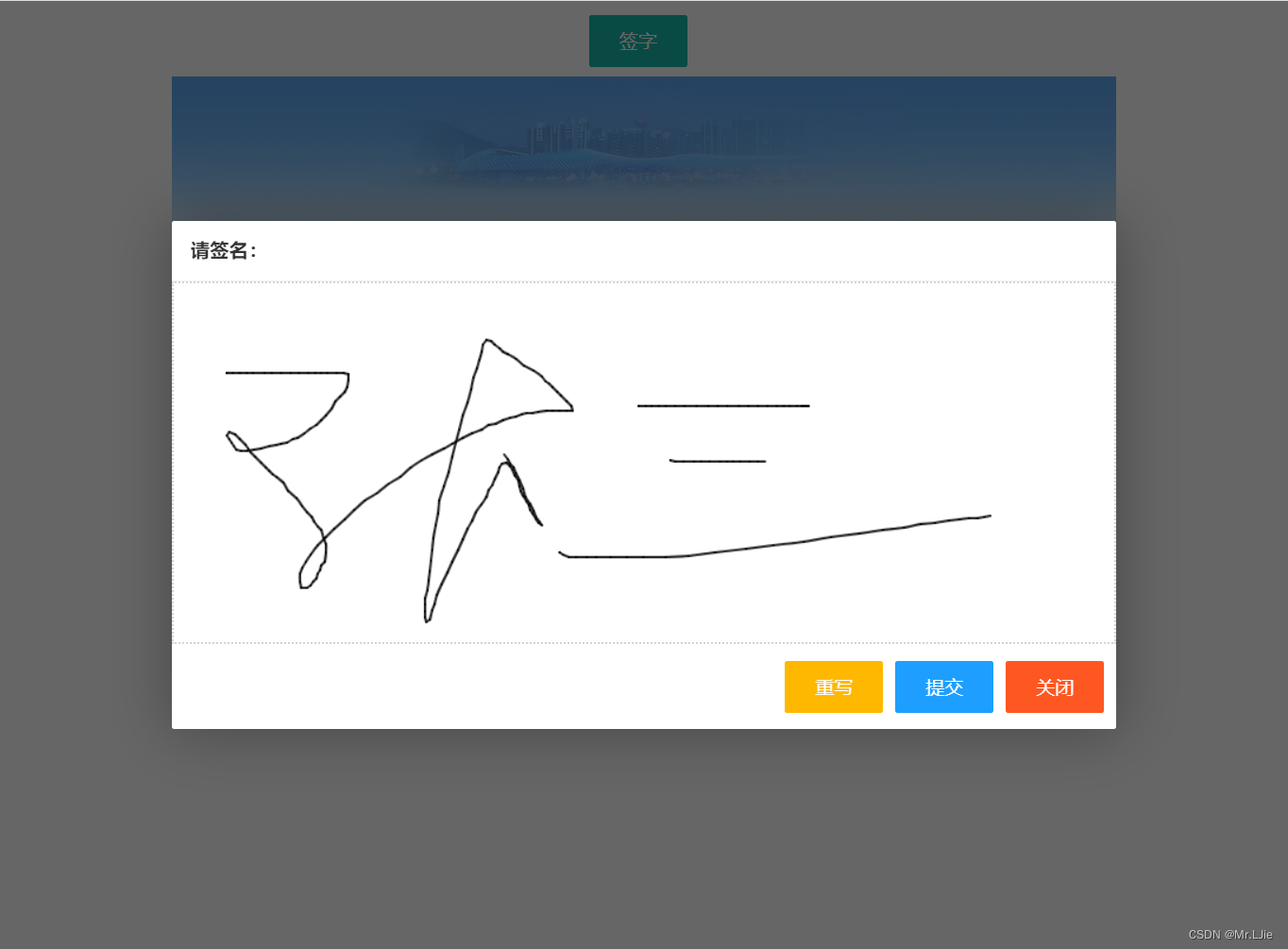
记录使用layui弹窗实现签名、签字
一、前言 本来项目使用的是OCX方式做签字的,因为项目需要转到国产化,不在支持OCX方式,需要使用前端进行签字操作 注:有啥问题看看文档,或者换着思路来,本文仅供参考! 二、使用组件 获取jSign…...
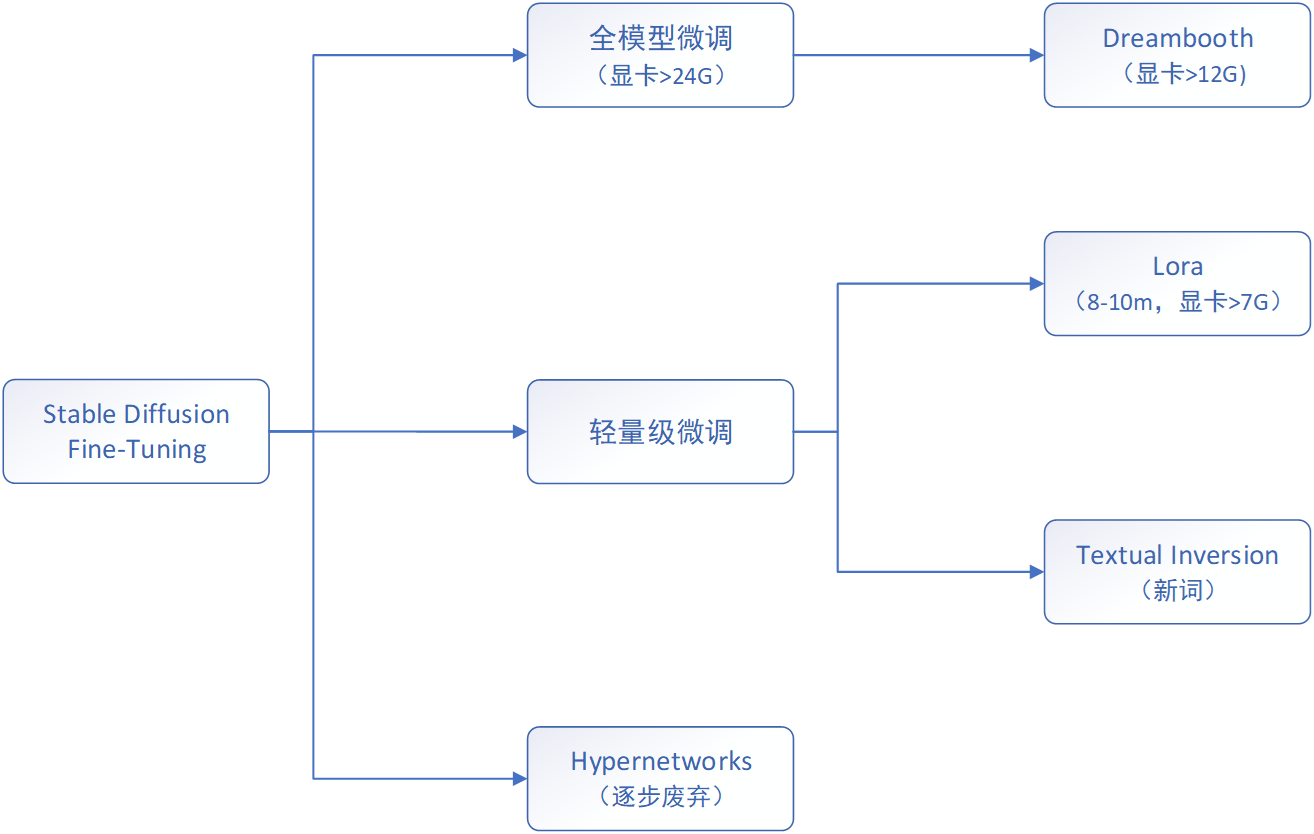
【AIGC系列】Stable Diffusion 小白快速入门课程大纲
一、前言 本文是《Stable Diffusion 从入门到企业级应用实战》系列课程的前置学习引导部分,《Stable Diffusion新手完整学习地图课程》的课程大纲。该课程主要的培训对象是: 没有人工智能背景,想快速上手Stable Diffusion的初学者;想掌握St…...
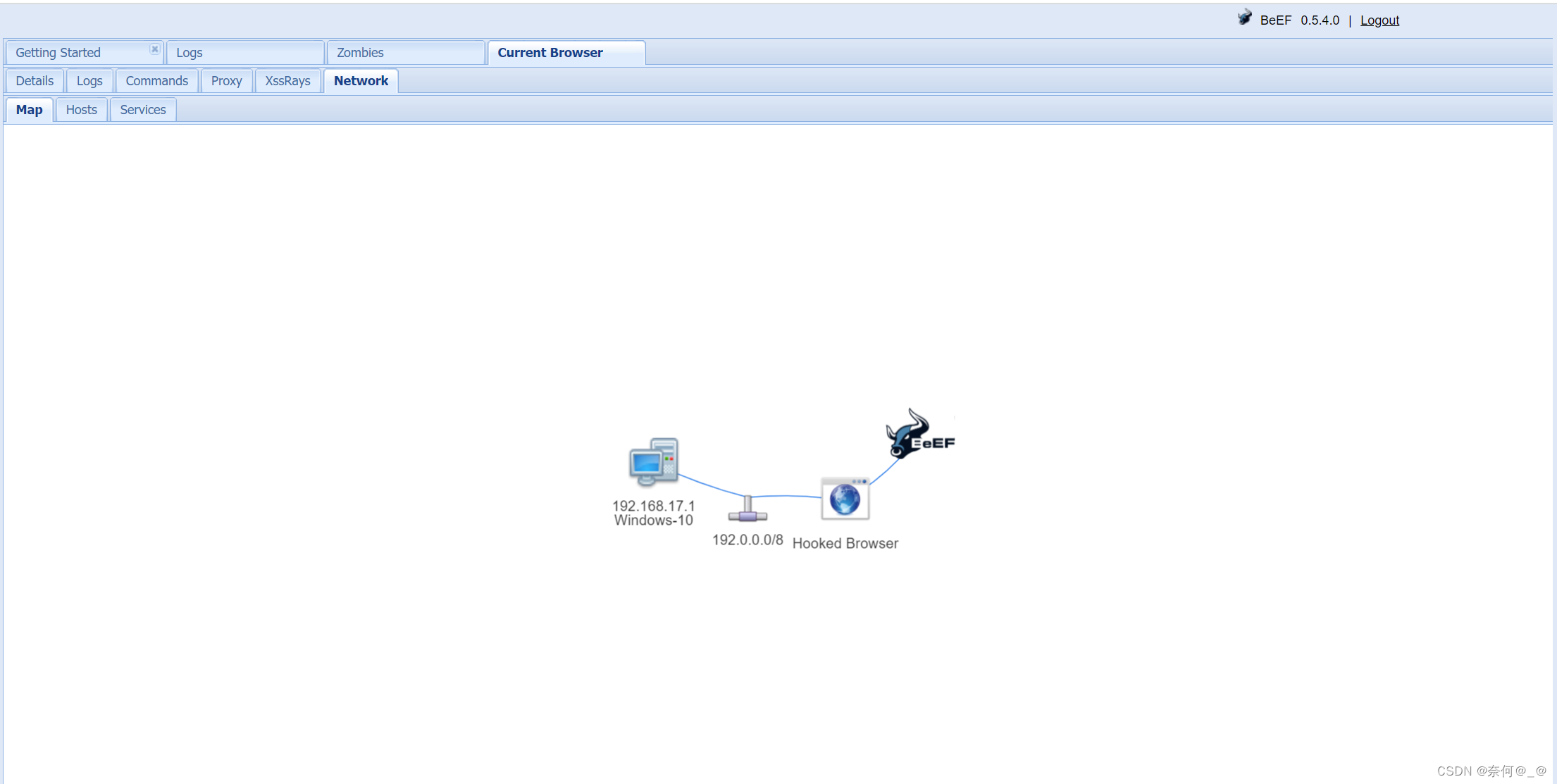
在kali环境下安装Beef-Xss靶场搭建
目录 一、更新安装包 二、安装beef-xss 三、启动Beef-Xss工具 1、查看hook.js 2、查看后台登录地址 3、查看用户名和登录密码 4、登录页面 5、点击 Hook me:将配置的页面导入BEEF中 一、更新安装包 ┌──(root㉿kali)-[/home/kali] └─# apt-get update 二、安装be…...
【Apollo】自动驾驶技术的介绍
阿波罗是百度发布的名为“Apollo(阿波罗)”的向汽车行业及自动驾驶领域的合作伙伴提供的软件平台。 帮助汽车行业及自动驾驶领域的合作伙伴结合车辆和硬件系统,快速搭建一套属于自己的自动驾驶系统。 百度开放此项计划旨在建立一个以合作为中…...
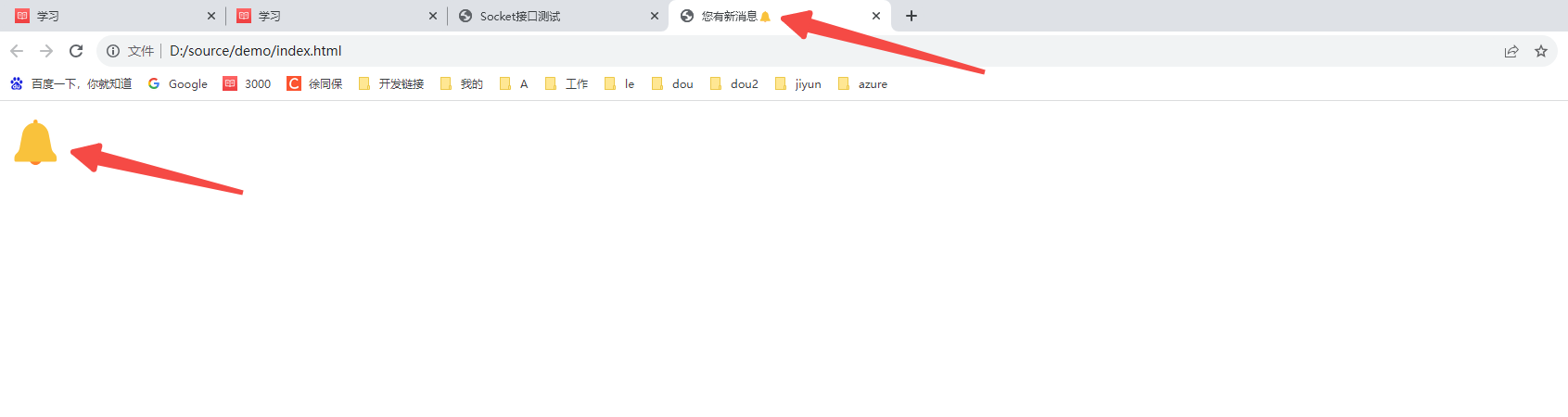
HTML emoji整理 表情符号
<!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8" /><title>测试</title></head><body><div style"font-size: 50px;">🔔</div><script>let count 0d…...
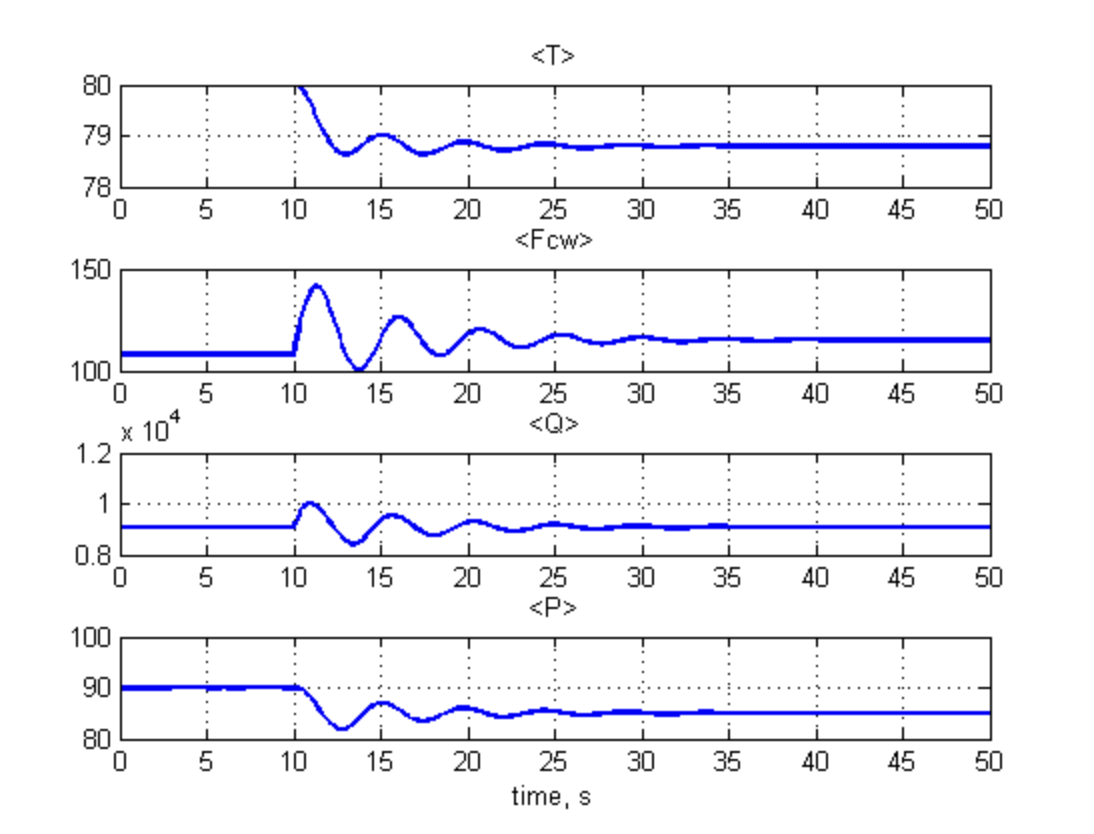
【蒸汽冷凝器型号和PI控制】具有PID控制的蒸汽冷凝器的动力学模型(MatlabSimulink)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

mall :hutool项目源码解析
文章目录 一、mall开源项目1.1 来源1.2 项目转移1.3 项目克隆 二、Hutool工具类库2.1 Hutool 简介 三、源码解析3.1 集成与配置3.1.1 导入依赖3.1.2 添加配置 3.2 核心工具类3.2.1 AnnotationUtil使用:注解工具类3.2.2 BeanUtil使用:JavaBean的工具类3.2…...

【网络编程】TCP传输控制协议(Transmission Control Protocol)
(꒪ꇴ꒪ ),Hello我是祐言QAQ我的博客主页:C/C语言,数据结构,Linux基础,ARM开发板,网络编程等领域UP🌍快上🚘,一起学习,让我们成为一个强大的攻城狮࿰…...
云原生Kubernetes:kubectl管理命令
目录 一、理论 1.kubectl 管理命令 2.项目的生命周期 二、实验 1.kubectl 管理命令 2.项目的生命周期 三、总结 一、理论 1.kubectl 管理命令 (1)陈述式资源管理方法 kubernetes集群管理集群资源的唯一入口是通过相应的方法调用apiserver的接口…...
)
前端面试的话术集锦第 5 篇:高频考点( 类型转换 深浅拷贝 模块化机制等)
这是记录前端面试的话术集锦第五篇博文——高频考点(类型转换 & 深浅拷贝 & 模块化机制等),我会不断更新该博文。❗❗❗ 1. typeof类型判断: typeof是否能正确判断类型? instanceof能正确判断对象的原理是什么 typeof对于原始类型来说,除了null都可以显示正确的类…...

XML Group端口详解
在XML数据映射过程中,经常需要对数据进行分组聚合操作。例如,当处理包含多个物料明细的XML文件时,可能需要将相同物料号的明细归为一组,或对相同物料号的数量进行求和计算。传统实现方式通常需要编写脚本代码,增加了开…...

[特殊字符] 智能合约中的数据是如何在区块链中保持一致的?
🧠 智能合约中的数据是如何在区块链中保持一致的? 为什么所有区块链节点都能得出相同结果?合约调用这么复杂,状态真能保持一致吗?本篇带你从底层视角理解“状态一致性”的真相。 一、智能合约的数据存储在哪里…...

SkyWalking 10.2.0 SWCK 配置过程
SkyWalking 10.2.0 & SWCK 配置过程 skywalking oap-server & ui 使用Docker安装在K8S集群以外,K8S集群中的微服务使用initContainer按命名空间将skywalking-java-agent注入到业务容器中。 SWCK有整套的解决方案,全安装在K8S群集中。 具体可参…...

<6>-MySQL表的增删查改
目录 一,create(创建表) 二,retrieve(查询表) 1,select列 2,where条件 三,update(更新表) 四,delete(删除表…...
【单片机期末】单片机系统设计
主要内容:系统状态机,系统时基,系统需求分析,系统构建,系统状态流图 一、题目要求 二、绘制系统状态流图 题目:根据上述描述绘制系统状态流图,注明状态转移条件及方向。 三、利用定时器产生时…...

Ascend NPU上适配Step-Audio模型
1 概述 1.1 简述 Step-Audio 是业界首个集语音理解与生成控制一体化的产品级开源实时语音对话系统,支持多语言对话(如 中文,英文,日语),语音情感(如 开心,悲伤)&#x…...
FFmpeg:Windows系统小白安装及其使用
一、安装 1.访问官网 Download FFmpeg 2.点击版本目录 3.选择版本点击安装 注意这里选择的是【release buids】,注意左上角标题 例如我安装在目录 F:\FFmpeg 4.解压 5.添加环境变量 把你解压后的bin目录(即exe所在文件夹)加入系统变量…...
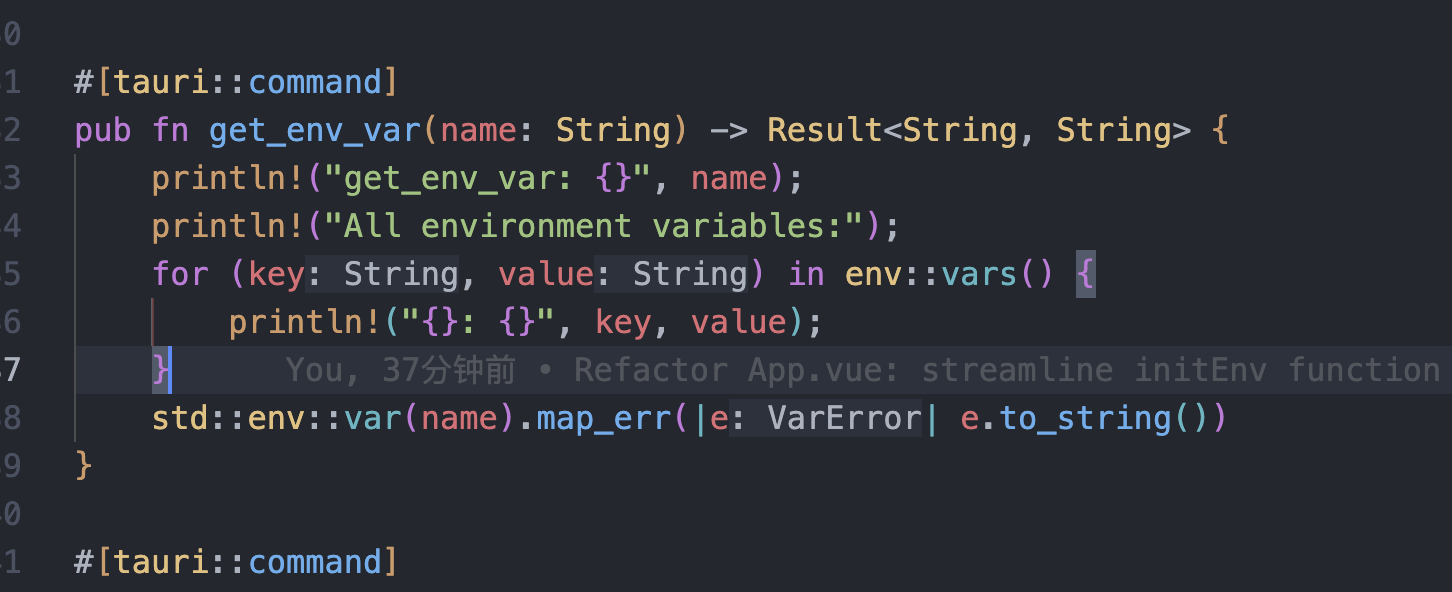
tauri项目,如何在rust端读取电脑环境变量
如果想在前端通过调用来获取环境变量的值,可以通过标准的依赖: std::env::var(name).ok() 想在前端通过调用来获取,可以写一个command函数: #[tauri::command] pub fn get_env_var(name: String) -> Result<String, Stri…...

0x-3-Oracle 23 ai-sqlcl 25.1 集成安装-配置和优化
是不是受够了安装了oracle database之后sqlplus的简陋,无法删除无法上下翻页的苦恼。 可以安装readline和rlwrap插件的话,配置.bahs_profile后也能解决上下翻页这些,但是很多生产环境无法安装rpm包。 oracle提供了sqlcl免费许可,…...
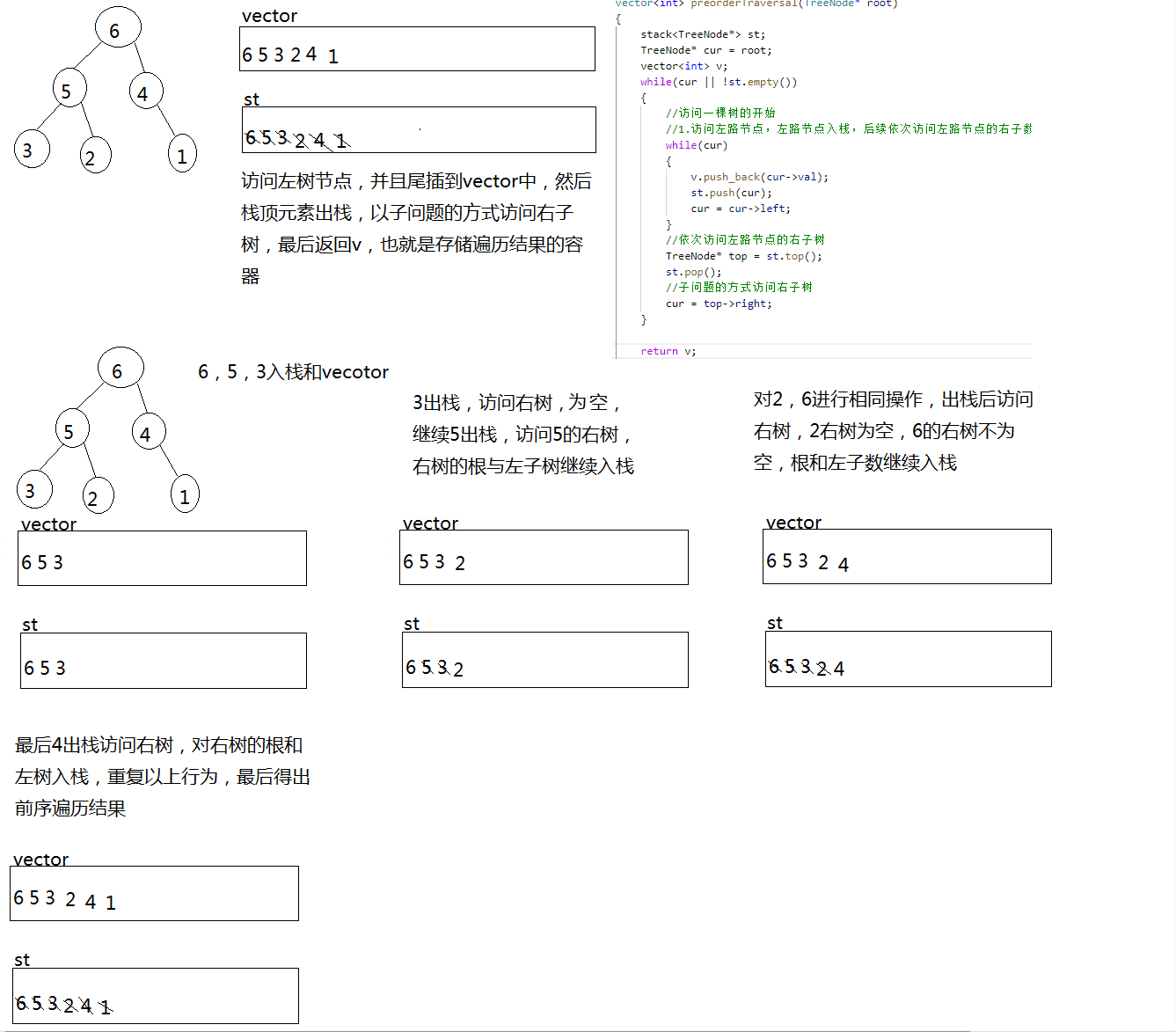
二叉树-144.二叉树的前序遍历-力扣(LeetCode)
一、题目解析 对于递归方法的前序遍历十分简单,但对于一位合格的程序猿而言,需要掌握将递归转化为非递归的能力,毕竟递归调用的时候会调用大量的栈帧,存在栈溢出风险。 二、算法原理 递归调用本质是系统建立栈帧,而非…...