嵌入式Linux驱动开发(LCD屏幕专题)(三)
1. 硬件相关的操作
LCD驱动程序的核心就是:
- 分配fb_info
- 设置fb_info
- 注册fb_info
- 硬件相关的设置
硬件相关的设置又可以分为3部分:
- 引脚设置
- 时钟设置
- LCD控制器设置
2. 在设备树里指定LCD参数
framebuffer-mylcd {compatible = "100ask,lcd_drv";pinctrl-names = "default";pinctrl-0 = <&mylcd_pinctrl>;backlight-gpios = <&gpio1 8 GPIO_ACTIVE_HIGH>;clocks = <&clks IMX6UL_CLK_LCDIF_PIX>,<&clks IMX6UL_CLK_LCDIF_APB>;clock-names = "pix", "axi";display = <&display0>;display0: display {bits-per-pixel = <24>;bus-width = <24>;display-timings {native-mode = <&timing0>;timing0: timing0_1024x768 {clock-frequency = <50000000>;hactive = <1024>;vactive = <600>;hfront-porch = <160>;hback-porch = <140>;hsync-len = <20>;vback-porch = <20>;vfront-porch = <12>;vsync-len = <3>;hsync-active = <0>;vsync-active = <0>;de-active = <1>;pixelclk-active = <0>;};};}; };
3. 编程
3.1 从设备树获得参数
时序参数、引脚极性等信息,都被保存在一个display_timing结构体里:
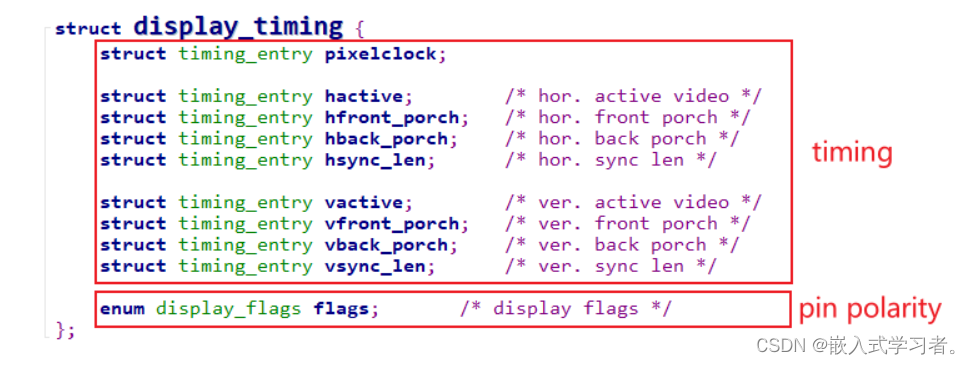
参考内核文件:
drivers\video\of_display_timing.cdrivers\video\fbdev\mxsfb.c
3.2 使用参数配置LCD控制器
根据芯片手册,一个一个设置寄存器:
- Framebuffer地址设置
- Framebuffer中数据格式设置
- LCD时序参数设置
- LCD引脚极性设置
4.上机实验
1. 要做的事情
-
去除内核自带的驱动程序
-
加入我们编写的驱动程序、设备树文件
-
重新编译内核、设备树
-
上机测试:使用编译出来的内核、设备树启动板子
2. 去除内核自带的驱动程序
修改内核文件:drivers/video/fbdev/Makefile,把内核自带驱动程序mxsfb.c对应的那行注释掉,如下:
#obj-$(CONFIG_FB_MXS) += mxsfb.o
3. 加入新驱动程序、设备树
-
复制驱动程序:
- 把
11_lcd_drv_imx6ull_ok\lcd_drv.c放到内核源码目录drivers/video/fbdev - 备份内核自带设备树文件:
arch/arm/boot/dts/100ask_imx6ull-14x14.dts - 把
11_lcd_drv_imx6ull_ok\100ask_imx6ull-14x14.dts放到内核源码目录arch/arm/boot/dts/
- 把
-
修改内核文件:
- 修改:
drivers/video/fbdev/Makefile,使用我们提供的lcd_drv.c,如下:
- 修改:
#obj-$(CONFIG_FB_MXS) += mxsfb.o
obj-$(CONFIG_FB_MXS) += lcd_drv.o
4. 重新编译内核、设备树
以下命令在Ubuntu中执行。
- 设置工具链
export ARCH=armexport CROSS_COMPILE=arm-linux-gnueabihf-export PATH=$PATH:/home/book/100ask_imx6ull-sdk/ToolChain/gcc-linaro-6.2.1-2016.11-x86_64_arm-linux-gnueabihf/bin
- 配置、编译
book@100ask:~/100ask_imx6ull-sdk$ cd Linux-4.9.88book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ make 100ask_imx6ull_defconfig book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ make zImage book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ make dtbs
-
得到
- 内核:
arch/arm/boot/zImage - 设备树文件:
arch/arm/boot/dts/100ask_imx6ull-14x14.dtb
- 内核:
-
复制到NFS目录:
$ cp arch/arm/boot/zImage ~/nfs_rootfs/$ cp arch/arm/boot/dts/100ask_imx6ull-14x14.dtb ~/nfs_rootfs/
5. 上机测试
以下命令在开发板中执行。
-
挂载NFS
-
vmware使用NAT(假设windowsIP为192.168.1.100)
[root@100ask:~]# mount -t nfs -o nolock,vers=3,port=2049,mountport=9999 192.168.1.100:/home/book/nfs_rootfs /mnt -
vmware使用桥接,或者不使用vmware而是直接使用服务器:假设Ubuntu IP为192.168.1.137
[root@100ask:~]# mount -t nfs -o nolock,vers=3 192.168.1.137:/home/book/nfs_rootfs /mnt
-
-
更新单板文件
[root@100ask:~]# cp /mnt/zImage /boot[root@100ask:~]# cp /mnt/100ask_imx6ull-14x14.dtb /boot[root@100ask:~]# sync
-
重启开发板观察现象
- 如果可以看到企鹅LOGO,就表示正常
- 如果在终端中可以查看到存在
/dev/fb0节点,也表示正常
-
解决BUG
-
现象:LCD上没有企鹅LOGO,在终端中执行
ls -l /dev/fb0发现没有设备节点 -
观察内核启动信息,看到:
[ 0.619880] imx6ul-pinctrl 20e0000.iomuxc: pin MX6UL_PAD_GPIO1_IO08 already requested by 2080000.pwm; cannot claim for 21c8000.framebuffer-mylcd [ 0.619920] imx6ul-pinctrl 20e0000.iomuxc: pin-31 (21c8000.framebuffer-mylcd) status -22 [ 0.619954] imx6ul-pinctrl 20e0000.iomuxc: could not request pin 31 (MX6UL_PAD_GPIO1_IO08) from group mylcd_pingrp on device 20e0000.iomuxc [ 0.619985] mylcd 21c8000.framebuffer-mylcd: Error applying setting, reverse things back [ 0.620070] mylcd: probe of 21c8000.framebuffer-mylcd failed with error -22 -
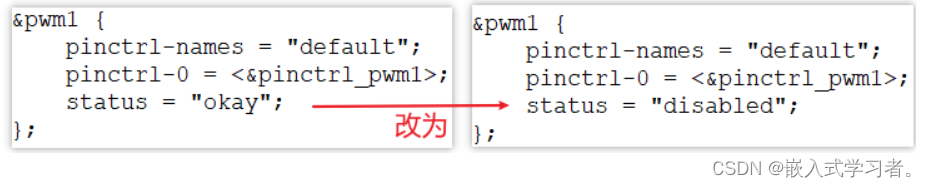
原因:引脚冲突
- 设备树中pwm节点、framebuffer-mylcd节点,都使用到的同一个引脚:PAD_GPIO1_IO08
-
解决方法:修改
arch/arm/boot/dts/100ask_imx6ull-14x14.dts,禁止pwm节点,如下:
-
6、代码
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/err.h>
#include <linux/errno.h>
#include <linux/string.h>
#include <linux/mm.h>
#include <linux/slab.h>
#include <linux/delay.h>
#include <linux/fb.h>
#include <linux/init.h>
#include <linux/dma-mapping.h>
#include <linux/interrupt.h>
#include <linux/platform_device.h>
#include <linux/clk.h>
#include <linux/cpufreq.h>
#include <linux/io.h>
#include <video/display_timing.h>
#include <video/of_display_timing.h>
#include <linux/gpio/consumer.h>
#include <asm/div64.h>
#include <asm/mach/map.h>struct imx6ull_lcdif {volatile unsigned int CTRL; volatile unsigned int CTRL_SET; volatile unsigned int CTRL_CLR; volatile unsigned int CTRL_TOG; volatile unsigned int CTRL1; volatile unsigned int CTRL1_SET; volatile unsigned int CTRL1_CLR; volatile unsigned int CTRL1_TOG; volatile unsigned int CTRL2; volatile unsigned int CTRL2_SET; volatile unsigned int CTRL2_CLR; volatile unsigned int CTRL2_TOG; volatile unsigned int TRANSFER_COUNT; unsigned char RESERVED_0[12];volatile unsigned int CUR_BUF; unsigned char RESERVED_1[12];volatile unsigned int NEXT_BUF; unsigned char RESERVED_2[12];volatile unsigned int TIMING; unsigned char RESERVED_3[12];volatile unsigned int VDCTRL0; volatile unsigned int VDCTRL0_SET; volatile unsigned int VDCTRL0_CLR; volatile unsigned int VDCTRL0_TOG; volatile unsigned int VDCTRL1; unsigned char RESERVED_4[12];volatile unsigned int VDCTRL2; unsigned char RESERVED_5[12];volatile unsigned int VDCTRL3; unsigned char RESERVED_6[12];volatile unsigned int VDCTRL4; unsigned char RESERVED_7[12];volatile unsigned int DVICTRL0; unsigned char RESERVED_8[12];volatile unsigned int DVICTRL1; unsigned char RESERVED_9[12];volatile unsigned int DVICTRL2; unsigned char RESERVED_10[12];volatile unsigned int DVICTRL3; unsigned char RESERVED_11[12];volatile unsigned int DVICTRL4; unsigned char RESERVED_12[12];volatile unsigned int CSC_COEFF0; unsigned char RESERVED_13[12];volatile unsigned int CSC_COEFF1; unsigned char RESERVED_14[12];volatile unsigned int CSC_COEFF2; unsigned char RESERVED_15[12];volatile unsigned int CSC_COEFF3; unsigned char RESERVED_16[12];volatile unsigned int CSC_COEFF4; unsigned char RESERVED_17[12];volatile unsigned int CSC_OFFSET; unsigned char RESERVED_18[12];volatile unsigned int CSC_LIMIT; unsigned char RESERVED_19[12];volatile unsigned int DATA; unsigned char RESERVED_20[12];volatile unsigned int BM_ERROR_STAT; unsigned char RESERVED_21[12];volatile unsigned int CRC_STAT; unsigned char RESERVED_22[12];volatile unsigned int STAT; unsigned char RESERVED_23[76];volatile unsigned int THRES; unsigned char RESERVED_24[12];volatile unsigned int AS_CTRL; unsigned char RESERVED_25[12];volatile unsigned int AS_BUF; unsigned char RESERVED_26[12];volatile unsigned int AS_NEXT_BUF; unsigned char RESERVED_27[12];volatile unsigned int AS_CLRKEYLOW; unsigned char RESERVED_28[12];volatile unsigned int AS_CLRKEYHIGH; unsigned char RESERVED_29[12];volatile unsigned int SYNC_DELAY;
} ;struct lcd_regs {volatile unsigned int fb_base_phys;volatile unsigned int fb_xres;volatile unsigned int fb_yres;volatile unsigned int fb_bpp;
};static struct lcd_regs *mylcd_regs;
static struct fb_info *myfb_info;
static unsigned int pseudo_palette[16];static struct gpio_desc *bl_gpio;
static struct clk* clk_pix;
static struct clk* clk_axi;static void lcd_controller_enable(struct imx6ull_lcdif *lcdif)
{lcdif->CTRL |= (1<<0);
}static int lcd_controller_init(struct imx6ull_lcdif *lcdif, struct display_timing *dt, int lcd_bpp, int fb_bpp, unsigned int fb_phy)
{int lcd_data_bus_width;int fb_width;int vsync_pol = 0;int hsync_pol = 0;int de_pol = 0;int clk_pol = 0;if (dt->flags & DISPLAY_FLAGS_HSYNC_HIGH)hsync_pol = 1;if (dt->flags & DISPLAY_FLAGS_VSYNC_HIGH)vsync_pol = 1;if (dt->flags & DISPLAY_FLAGS_DE_HIGH)de_pol = 1;if (dt->flags & DISPLAY_FLAGS_PIXDATA_POSEDGE)clk_pol = 1;if (lcd_bpp == 24)lcd_data_bus_width = 0x3;else if (lcd_bpp == 18)lcd_data_bus_width = 0x2;else if (lcd_bpp == 8)lcd_data_bus_width = 0x1;else if (lcd_bpp == 16)lcd_data_bus_width = 0x0;elsereturn -1;if (fb_bpp == 24 || fb_bpp == 32)fb_width = 0x3;else if (fb_bpp == 18)fb_width = 0x2;else if (fb_bpp == 8)fb_width = 0x1;else if (fb_bpp == 16)fb_width = 0x0;elsereturn -1;/* * 初始化LCD控制器的CTRL寄存器* [19] : 1 : DOTCLK和DVI modes需要设置为1 * [17] : 1 : 设置为1工作在DOTCLK模式* [15:14] : 00 : 输入数据不交换(小端模式)默认就为0,不需设置* [13:12] : 00 : CSC数据不交换(小端模式)默认就为0,不需设置* [11:10] : 11 : 数据总线为24bit* [9:8] 根据显示屏资源文件bpp来设置:8位0x1 , 16位0x0 ,24位0x3* [5] : 1 : 设置elcdif工作在主机模式* [1] : 0 : 24位数据均是有效数据,默认就为0,不需设置*/ lcdif->CTRL = (0<<30) | (0<<29) | (0<<28) | (1<<19) | (1<<17) | (lcd_data_bus_width << 10) |\(fb_width << 8) | (1<<5);/** 设置ELCDIF的寄存器CTRL1* 根据bpp设置,bpp为24或32才设置* [19:16] : 111 :表示ARGB传输格式模式下,传输24位无压缩数据,A通道不用传输)*/ if(fb_bpp == 24 || fb_bpp == 32){ lcdif->CTRL1 &= ~(0xf << 16); lcdif->CTRL1 |= (0x7 << 16); }elselcdif->CTRL1 |= (0xf << 16); /** 设置ELCDIF的寄存器TRANSFER_COUNT寄存器* [31:16] : 垂直方向上的像素个数 * [15:0] : 水平方向上的像素个数*/lcdif->TRANSFER_COUNT = (dt->vactive.typ << 16) | (dt->hactive.typ << 0);/** 设置ELCDIF的VDCTRL0寄存器* [29] 0 : VSYNC输出 ,默认为0,无需设置* [28] 1 : 在DOTCLK模式下,设置1硬件会产生使能ENABLE输出* [27] 0 : VSYNC低电平有效 ,根据屏幕配置文件将其设置为0* [26] 0 : HSYNC低电平有效 , 根据屏幕配置文件将其设置为0* [25] 1 : DOTCLK下降沿有效 ,根据屏幕配置文件将其设置为1* [24] 1 : ENABLE信号高电平有效,根据屏幕配置文件将其设置为1* [21] 1 : 帧同步周期单位,DOTCLK mode设置为1* [20] 1 : 帧同步脉冲宽度单位,DOTCLK mode设置为1* [17:0] : vysnc脉冲宽度 */lcdif->VDCTRL0 = (1 << 28)|( vsync_pol << 27)\|( hsync_pol << 26)\|( clk_pol << 25)\|( de_pol << 24)\|(1 << 21)|(1 << 20)|( dt->vsync_len.typ << 0);/** 设置ELCDIF的VDCTRL1寄存器* 设置垂直方向的总周期:上黑框tvb+垂直同步脉冲tvp+垂直有效高度yres+下黑框tvf*/ lcdif->VDCTRL1 = dt->vback_porch.typ + dt->vsync_len.typ + dt->vactive.typ + dt->vfront_porch.typ; /** 设置ELCDIF的VDCTRL2寄存器* [18:31] : 水平同步信号脉冲宽度* [17: 0] : 水平方向总周期* 设置水平方向的总周期:左黑框thb+水平同步脉冲thp+水平有效高度xres+右黑框thf*/ lcdif->VDCTRL2 = (dt->hsync_len.typ << 18) | (dt->hback_porch.typ + dt->hsync_len.typ + dt->hactive.typ + dt->hfront_porch.typ);/** 设置ELCDIF的VDCTRL3寄存器* [27:16] :水平方向上的等待时钟数 =thb + thp* [15:0] : 垂直方向上的等待时钟数 = tvb + tvp*/ lcdif->VDCTRL3 = ((dt->hback_porch.typ + dt->hsync_len.typ) << 16) | (dt->vback_porch.typ + dt->vsync_len.typ);/** 设置ELCDIF的VDCTRL4寄存器* [18] 使用VSHYNC、HSYNC、DOTCLK模式此为置1* [17:0] : 水平方向的宽度*/ lcdif->VDCTRL4 = (1<<18) | (dt->hactive.typ);/** 设置ELCDIF的CUR_BUF和NEXT_BUF寄存器* CUR_BUF : 当前显存地址* NEXT_BUF : 下一帧显存地址* 方便运算,都设置为同一个显存地址*/ lcdif->CUR_BUF = fb_phy;lcdif->NEXT_BUF = fb_phy;return 0;
}/* from pxafb.c */
static inline unsigned int chan_to_field(unsigned int chan,struct fb_bitfield *bf)
{chan &= 0xffff;chan >>= 16 - bf->length;return chan << bf->offset;
}static int mylcd_setcolreg(unsigned regno,unsigned red, unsigned green, unsigned blue,unsigned transp, struct fb_info *info)
{unsigned int val;/* dprintk("setcol: regno=%d, rgb=%d,%d,%d\n",regno, red, green, blue); */switch (info->fix.visual) {case FB_VISUAL_TRUECOLOR:/* true-colour, use pseudo-palette */if (regno < 16) {u32 *pal = info->pseudo_palette;val = chan_to_field(red, &info->var.red);val |= chan_to_field(green, &info->var.green);val |= chan_to_field(blue, &info->var.blue);pal[regno] = val;}break;default:return 1; /* unknown type */}return 0;
}static struct fb_ops myfb_ops = {.owner = THIS_MODULE,.fb_setcolreg = mylcd_setcolreg,.fb_fillrect = cfb_fillrect,.fb_copyarea = cfb_copyarea,.fb_imageblit = cfb_imageblit,
};static int mylcd_probe(struct platform_device *pdev)
{struct device_node *display_np;dma_addr_t phy_addr;int ret;int width;int bits_per_pixel;struct display_timings *timings = NULL;struct display_timing *dt = NULL;struct imx6ull_lcdif *lcdif;struct resource *res;display_np = of_parse_phandle(pdev->dev.of_node, "display", 0);/* get common info */ret = of_property_read_u32(display_np, "bus-width", &width);ret = of_property_read_u32(display_np, "bits-per-pixel",&bits_per_pixel);/* get timming */timings = of_get_display_timings(display_np);dt = timings->timings[timings->native_mode];/* get gpio from device tree */bl_gpio = gpiod_get(&pdev->dev, "backlight", 0);/* config bl_gpio as output */gpiod_direction_output(bl_gpio, 1);/* set val: gpiod_set_value(bl_gpio, status); *//* get clk from device tree */clk_pix = devm_clk_get(&pdev->dev, "pix");clk_axi = devm_clk_get(&pdev->dev, "axi");/* set clk rate */clk_set_rate(clk_pix, dt->pixelclock.typ);/* enable clk */clk_prepare_enable(clk_pix);clk_prepare_enable(clk_axi);/* 1.1 分配fb_info */myfb_info = framebuffer_alloc(0, NULL);/* 1.2 设置fb_info *//* a. var : LCD分辨率、颜色格式 */myfb_info->var.xres_virtual = myfb_info->var.xres = dt->hactive.typ;myfb_info->var.yres_virtual = myfb_info->var.yres = dt->vactive.typ;myfb_info->var.bits_per_pixel = 16; /* rgb565 */myfb_info->var.red.offset = 11;myfb_info->var.red.length = 5;myfb_info->var.green.offset = 5;myfb_info->var.green.length = 6;myfb_info->var.blue.offset = 0;myfb_info->var.blue.length = 5;/* b. fix */strcpy(myfb_info->fix.id, "100ask_lcd");myfb_info->fix.smem_len = myfb_info->var.xres * myfb_info->var.yres * myfb_info->var.bits_per_pixel / 8;if (myfb_info->var.bits_per_pixel == 24)myfb_info->fix.smem_len = myfb_info->var.xres * myfb_info->var.yres * 4;/* fb的虚拟地址 */myfb_info->screen_base = dma_alloc_wc(NULL, myfb_info->fix.smem_len, &phy_addr,GFP_KERNEL);myfb_info->fix.smem_start = phy_addr; /* fb的物理地址 */myfb_info->fix.type = FB_TYPE_PACKED_PIXELS;myfb_info->fix.visual = FB_VISUAL_TRUECOLOR;myfb_info->fix.line_length = myfb_info->var.xres * myfb_info->var.bits_per_pixel / 8;if (myfb_info->var.bits_per_pixel == 24)myfb_info->fix.line_length = myfb_info->var.xres * 4;/* c. fbops */myfb_info->fbops = &myfb_ops;myfb_info->pseudo_palette = pseudo_palette;/* 1.3 注册fb_info */register_framebuffer(myfb_info);/* 1.4 硬件操作 *///lcdif = ioremap(0x021C8000, sizeof(*lcdif));res = platform_get_resource(pdev, IORESOURCE_MEM, 0);lcdif = devm_ioremap_resource(&pdev->dev, res);lcd_controller_init(lcdif, dt, bits_per_pixel, 16, phy_addr);lcd_controller_enable(lcdif);gpiod_set_value(bl_gpio, 1); return 0;
}static int mylcd_remove(struct platform_device *pdev)
{/* 反过来操作 *//* 2.1 反注册fb_info */unregister_framebuffer(myfb_info);/* 2.2 释放fb_info */framebuffer_release(myfb_info);iounmap(mylcd_regs);return 0;
}static const struct of_device_id mylcd_of_match[] = {{ .compatible = "100ask,lcd_drv", },{ },
};
MODULE_DEVICE_TABLE(of, simplefb_of_match);static struct platform_driver mylcd_driver = {.driver = {.name = "mylcd",.of_match_table = mylcd_of_match,},.probe = mylcd_probe,.remove = mylcd_remove,
};static int __init lcd_drv_init(void)
{int ret;ret = platform_driver_register(&mylcd_driver);if (ret)return ret;return 0;
}/* 2. 出口 */
static void __exit lcd_drv_exit(void)
{platform_driver_unregister(&mylcd_driver);
}module_init(lcd_drv_init);
module_exit(lcd_drv_exit);
MODULE_LICENSE("GPL");
相关文章:
嵌入式Linux驱动开发(LCD屏幕专题)(三)
1. 硬件相关的操作 LCD驱动程序的核心就是: 分配fb_info设置fb_info注册fb_info硬件相关的设置 硬件相关的设置又可以分为3部分: 引脚设置时钟设置LCD控制器设置 2. 在设备树里指定LCD参数 framebuffer-mylcd {compatible "100ask,lcd_drv&qu…...
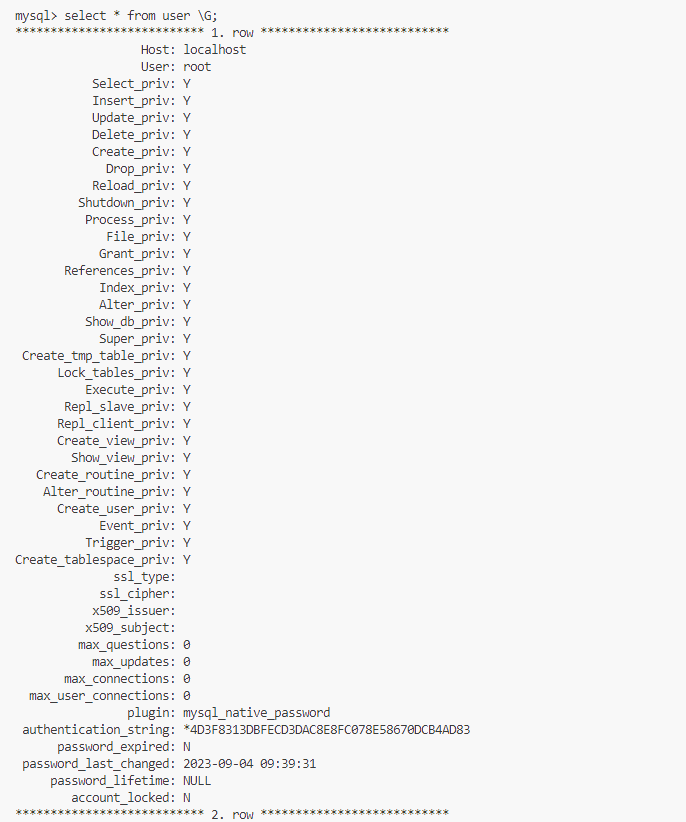
MySQL视图用户管理
文章目录 视图视图的规则用户用户信息创建用户删除用户修改密码 用户权限给用户授权回收权限 视图 视图是一个虚拟表,其内容由查询定义。同真实的表一样,视图包含一系列带有名称的列和行数据。视图的数据变化会影响到基表,基表的数据变化也会…...

我发现了一个很好看的字体,霞鹜文楷!如何换windows和typora字体?
1、字体 官方地址如下,下载也很简单。 https://github.com/lxgw/LxgwWenKai 有1W多的stars。 方式: 直接打包下载。下载不来,可以联系我。 然后ttf的文件,全部安装就行了。 reg save "HKCU\Control Panel" .\res…...

微软8月系统更新引发问题:虚拟内存分页文件出现错误
微软的八月系统更新引发了一系列问题,其中包括“UNSUPPORTED_PROCESSOR”蓝屏错误和文件管理器故障。尽管微软已经修复了前者,但据国外科技媒体Windows Latest报道,仍有用户反馈在非微星设备上出现“fault in nonpaged area”蓝屏错误。 如果…...
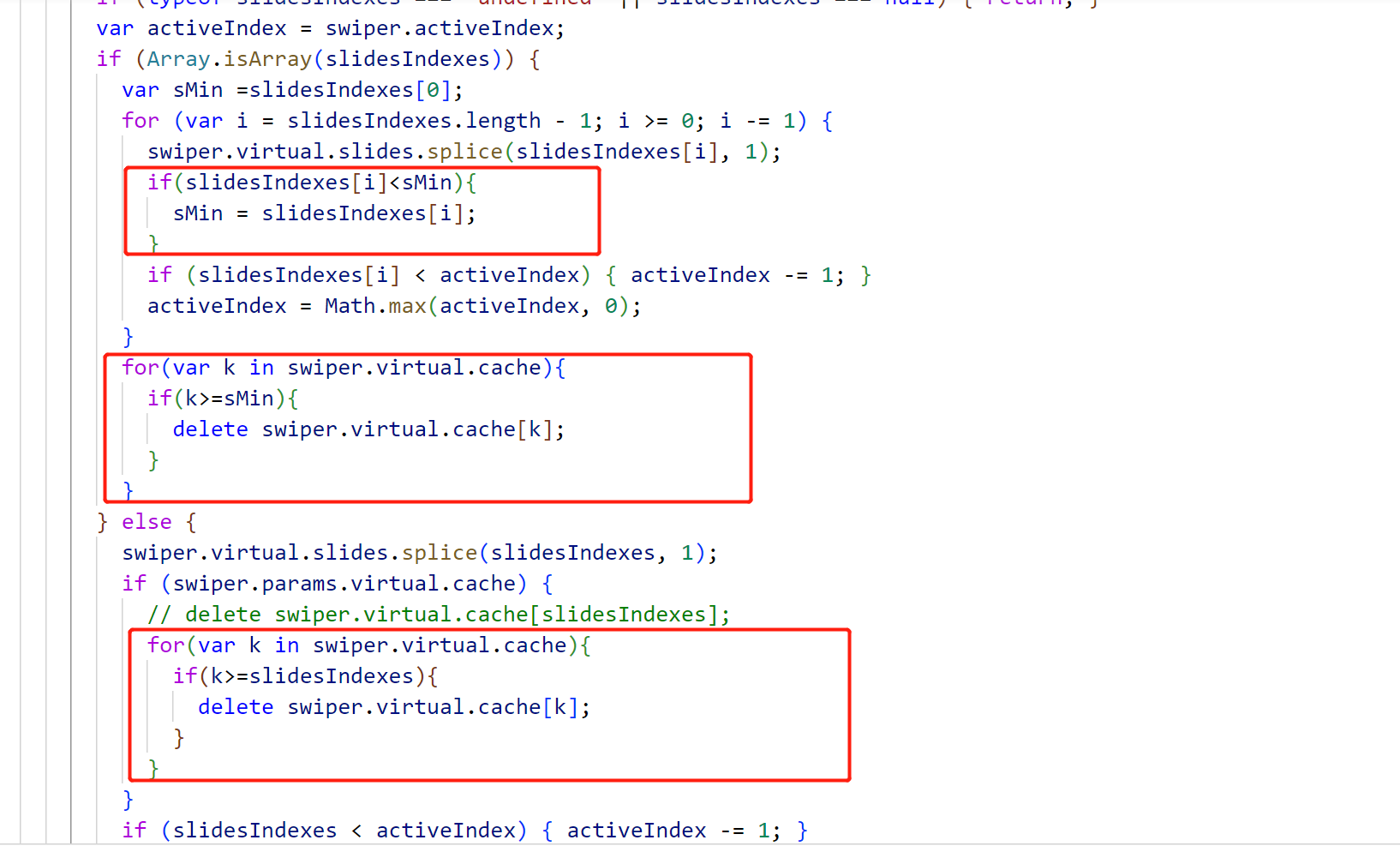
swiper删除虚拟slide问题
在存在缓存的情况下,删除较前的slide,会出现当前slide与后一个slide重复出现的情况 假设当前存在5个slide,且这5个slide已缓存,则删除slide2后,仍为5个slide,且slide2的内容变为slide3的内容,此…...
FPGA实战小项目2
基于FPGA的贪吃蛇游戏 基于FPGA的贪吃蛇游戏 基于fpga的数字密码锁ego1 基于fpga的数字密码锁ego1 基于fpga的数字时钟 basys3 基于fpga的数字时钟 basys3...

一些关于完整小程序项目的优秀开源
转载自: 35个项目,开源,开源! (qq.com) 那几本霸占我休息时间的PDF! (qq.com) 13个超强的 SpringBoot 实战项目 (还不赶紧收藏起来) (qq.com) 用SpringBoot开发一个人脸识别系统!…...

Windows模拟器推荐
物是人非事事休,欲语泪先流 Windows模拟器推荐 如果你需要在 Windows 操作系统之外运行 Windows 应用程序或测试不同版本的 Windows,有几个 Windows 模拟器和虚拟机软件可供选择。以下是一些常用的 Windows 模拟器和虚拟机软件: VirtualBox&…...

搭建RabbitMQ消息服务,整合SpringBoot实现收发消息
作者主页:Designer 小郑 作者简介:3年JAVA全栈开发经验,专注JAVA技术、系统定制、远程指导,致力于企业数字化转型,CSDN博客专家,蓝桥云课认证讲师。 目录 一、前言1.1 什么是消息队列1.2 RabbitMQ 是什么1.…...
Web framework-Gin(二)
目录 一、Gin 1、Ajax 2、文件上传 2.1、form表单中文件上传(单个文件) 2.2、form表单中文件上传(多个文件) 2.3、ajax上传单个文件 2.4、ajax上传多个文件 3、模板语法 4、数据绑定 5、路由组 6、中间件 一、Gin 1、Ajax AJAX 即“Asynchronous Javascript And XM…...
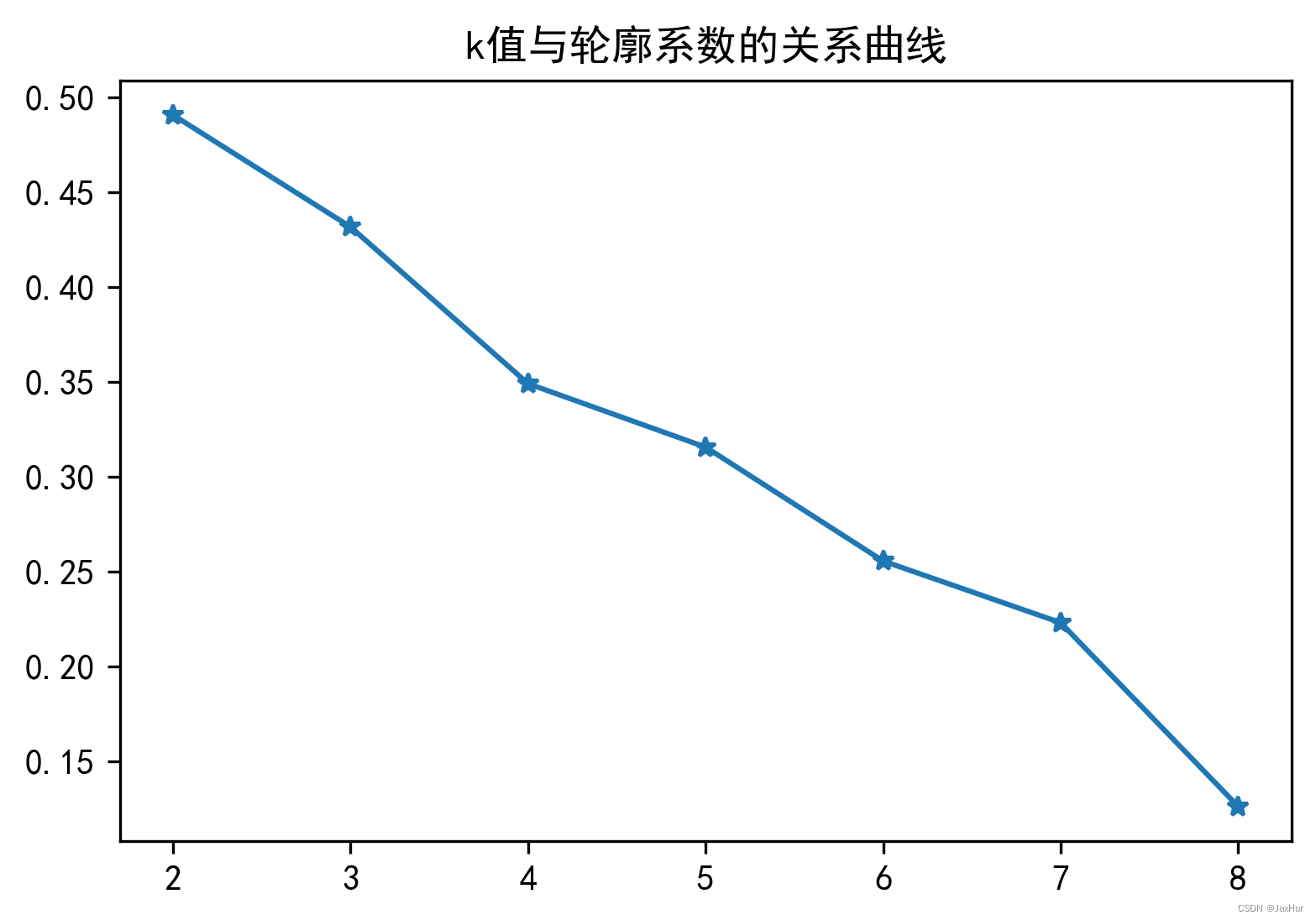
【聚类】K-Means聚类
cluster:簇 原理: 这边暂时没有时间具体介绍kmeans聚类的原理。简单来说,就是首先初始化k个簇心;然后计算所有点到簇心的欧式距离,对一个点来说,距离最短就属于那个簇;然后更新不同簇的簇心&a…...
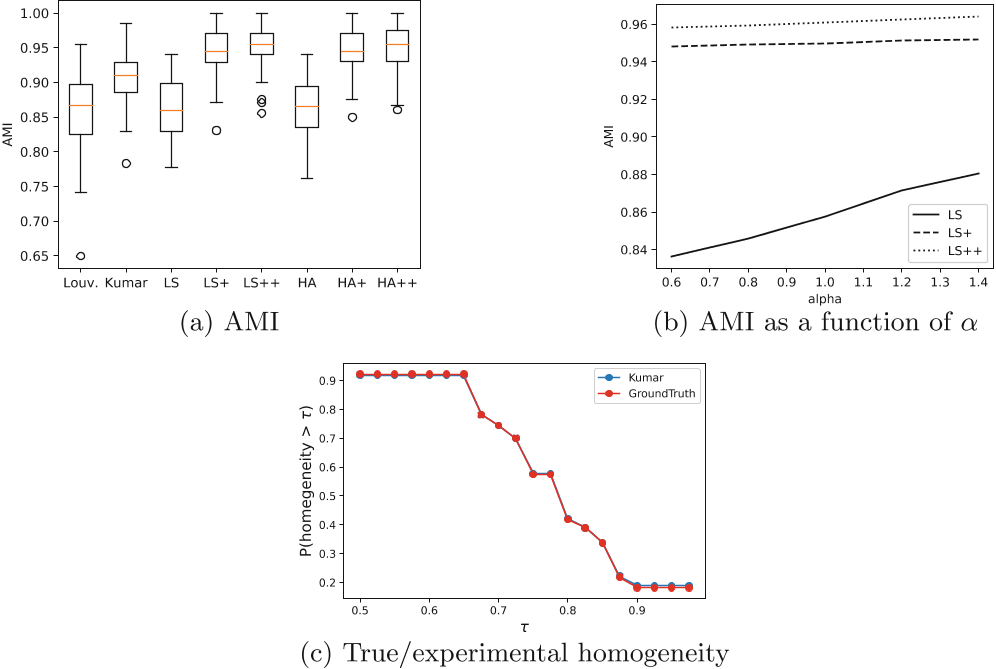
超图聚类论文阅读2:Last-step算法
超图聚类论文阅读2:Last-step算法 《使用超图模块化的社区检测算法》 《Community Detection Algorithm Using Hypergraph Modularity》 COMPLEX NETWORKS 2021, SCI 3区 具体实现源码见HyperNetX库 工作:提出了一种用于超图的社区检测算法。该算法的主要…...

React 防抖与节流用法
在React中,防抖和节流是优化性能和提升用户体验的常用技术。下面是它们的用法: 防抖(Debounce):防抖是指在某个事件触发后,等待一段时间后执行回调函数。如果在等待时间内再次触发该事件,将重新…...

发布 VectorTraits v1.0,它是 C# 下增强SIMD向量运算的类库
发布 VectorTraits v1.0, 它是C#下增强SIMD向量运算的类库 VectorTraits: SIMD Vector type traits methods (SIMD向量类型的特征方法). NuGet: https://www.nuget.org/packages/VectorTraits/1.0.0 源代码: https://github.com/zyl910/VectorTraits 用途 总所周知&#x…...

HCIA自学笔记01-冲突域
共享式网络(用同一根同轴电缆通信)中可能会出现信号冲突现象。 如图是一个10BASE5以太网,每个主机都是用同一根同轴电缆来与其它主机进行通信,因此,这里的同轴电缆又被称为共享介质,相应的网络被称为共享介…...

3D封装技术发展
长期以来,芯片制程微缩技术一直驱动着摩尔定律的延续。从1987年的1um制程到2015年的14nm制程,芯片制程迭代速度一直遵循摩尔定律的规律,即芯片上可以容纳的晶体管数目在大约每经过18个月到24个月便会增加一倍。但2015年以后,芯片制…...

探讨下live555用的编程设计模式
这个应该放到这里 7.live555mediaserver-第1阶段小结(完整对象图和思维导图) https://blog.csdn.net/yhb1206/article/details/127330771 但是想想,还是拿出来吧。 从这第1阶段就能发现,它实质用到了reactor网络编程模式。...
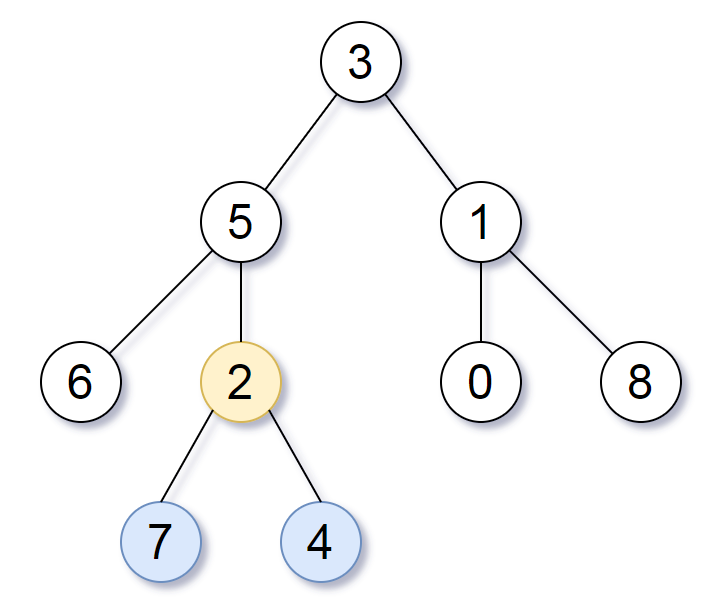
LeetCode 1123. Lowest Common Ancestor of Deepest Leaves【树,DFS,BFS,哈希表】1607
本文属于「征服LeetCode」系列文章之一,这一系列正式开始于2021/08/12。由于LeetCode上部分题目有锁,本系列将至少持续到刷完所有无锁题之日为止;由于LeetCode还在不断地创建新题,本系列的终止日期可能是永远。在这一系列刷题文章…...
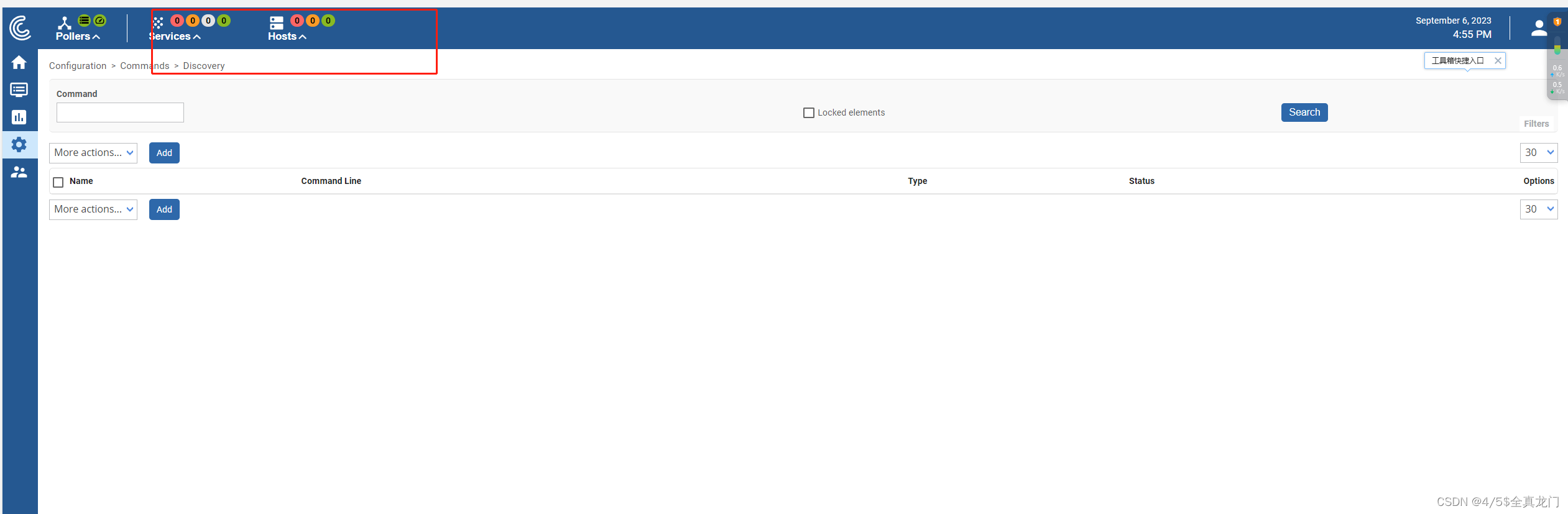
centroen 23版本换界面了
旧版本 新版本 没有与操作系统一起打包的ISO文件了,要么先安装系统,再安装Centreon,要么用pve导入OVF文件...
)
Postman 调用 Microsoft Graph API (InsCode AI 创作助手)
官方配置参考网址: https://learn.microsoft.com/zh-cn/graph/use-postman 获取 Azure AD 应用程序凭据: 在 Azure AD 中注册你的应用程序,并获取客户端ID和客户端密钥。这些凭据将允许你的应用程序与 Microsoft Graph 进行身份验证和访问权限…...
)
Java 语言特性(面试系列2)
一、SQL 基础 1. 复杂查询 (1)连接查询(JOIN) 内连接(INNER JOIN):返回两表匹配的记录。 SELECT e.name, d.dept_name FROM employees e INNER JOIN departments d ON e.dept_id d.dept_id; 左…...

大型活动交通拥堵治理的视觉算法应用
大型活动下智慧交通的视觉分析应用 一、背景与挑战 大型活动(如演唱会、马拉松赛事、高考中考等)期间,城市交通面临瞬时人流车流激增、传统摄像头模糊、交通拥堵识别滞后等问题。以演唱会为例,暖城商圈曾因观众集中离场导致周边…...
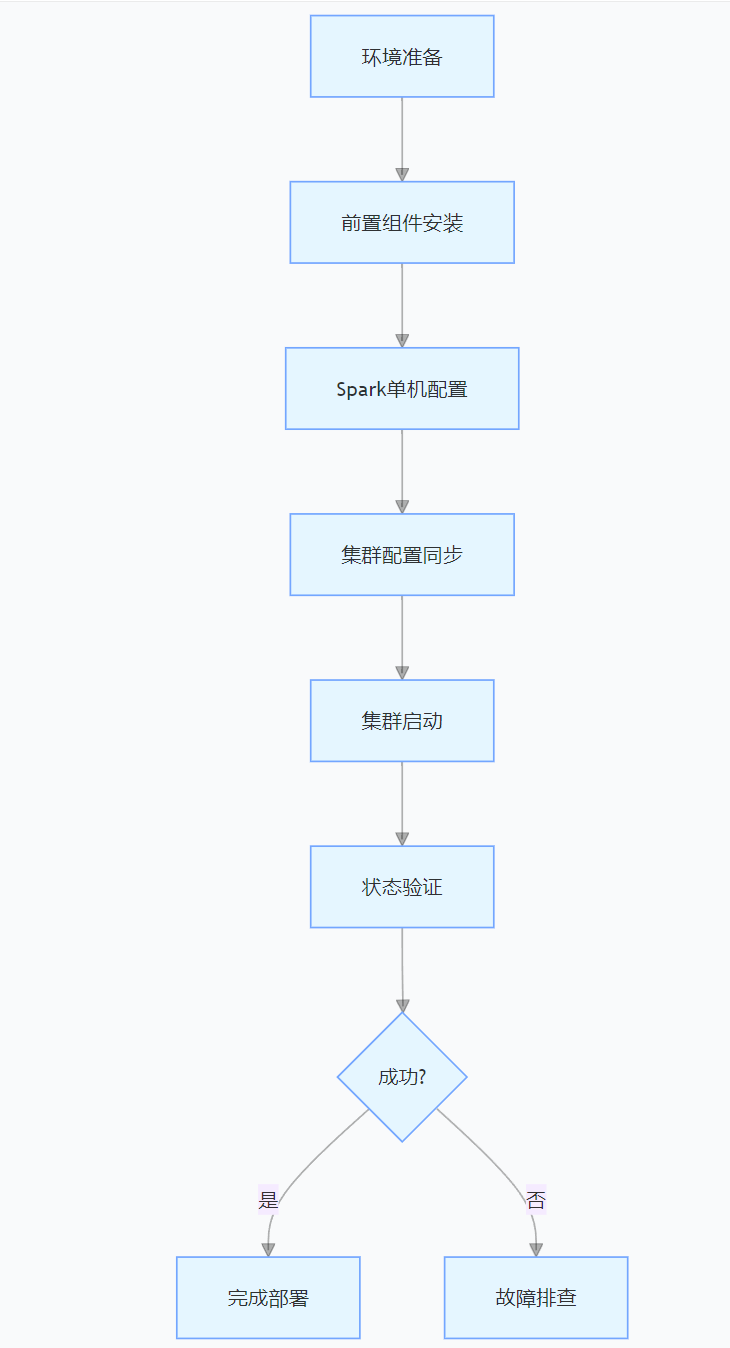
CentOS下的分布式内存计算Spark环境部署
一、Spark 核心架构与应用场景 1.1 分布式计算引擎的核心优势 Spark 是基于内存的分布式计算框架,相比 MapReduce 具有以下核心优势: 内存计算:数据可常驻内存,迭代计算性能提升 10-100 倍(文档段落:3-79…...

服务器硬防的应用场景都有哪些?
服务器硬防是指一种通过硬件设备层面的安全措施来防御服务器系统受到网络攻击的方式,避免服务器受到各种恶意攻击和网络威胁,那么,服务器硬防通常都会应用在哪些场景当中呢? 硬防服务器中一般会配备入侵检测系统和预防系统&#x…...
cf2117E
原题链接:https://codeforces.com/contest/2117/problem/E 题目背景: 给定两个数组a,b,可以执行多次以下操作:选择 i (1 < i < n - 1),并设置 或,也可以在执行上述操作前执行一次删除任意 和 。求…...
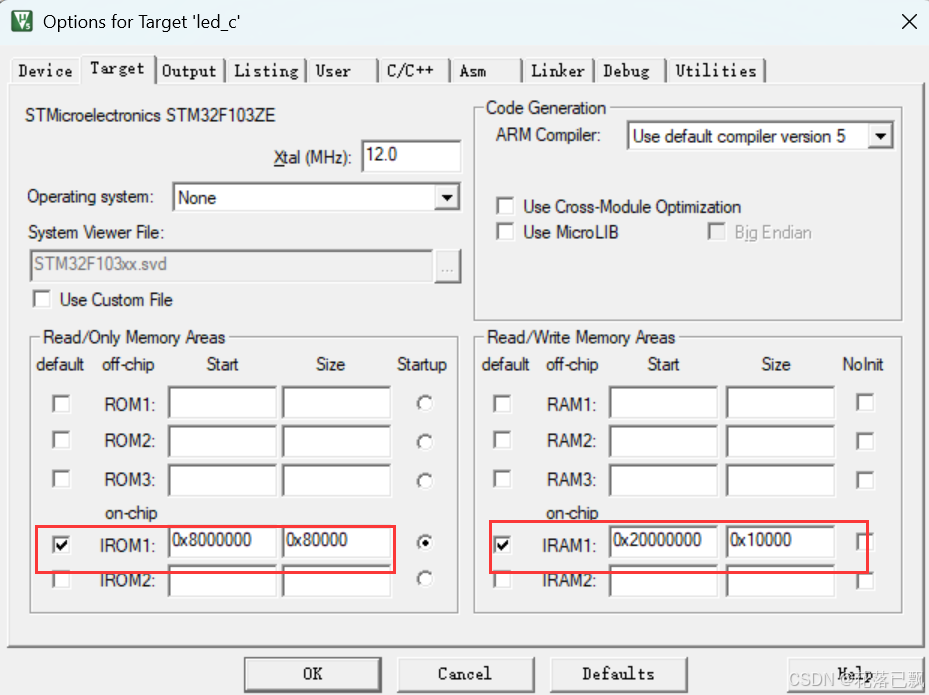
Keil 中设置 STM32 Flash 和 RAM 地址详解
文章目录 Keil 中设置 STM32 Flash 和 RAM 地址详解一、Flash 和 RAM 配置界面(Target 选项卡)1. IROM1(用于配置 Flash)2. IRAM1(用于配置 RAM)二、链接器设置界面(Linker 选项卡)1. 勾选“Use Memory Layout from Target Dialog”2. 查看链接器参数(如果没有勾选上面…...
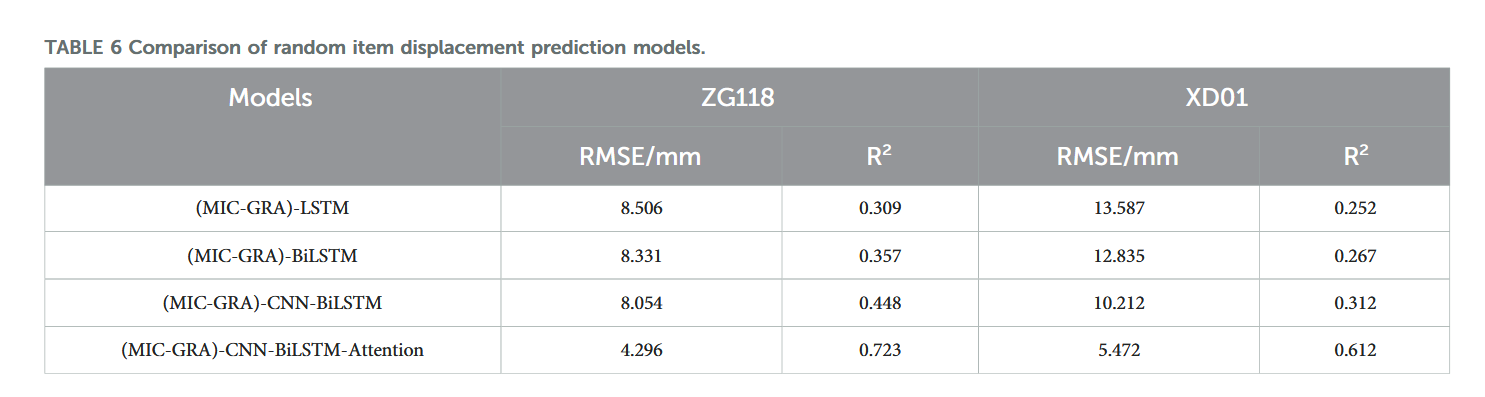
【论文阅读28】-CNN-BiLSTM-Attention-(2024)
本文把滑坡位移序列拆开、筛优质因子,再用 CNN-BiLSTM-Attention 来动态预测每个子序列,最后重构出总位移,预测效果超越传统模型。 文章目录 1 引言2 方法2.1 位移时间序列加性模型2.2 变分模态分解 (VMD) 具体步骤2.3.1 样本熵(S…...
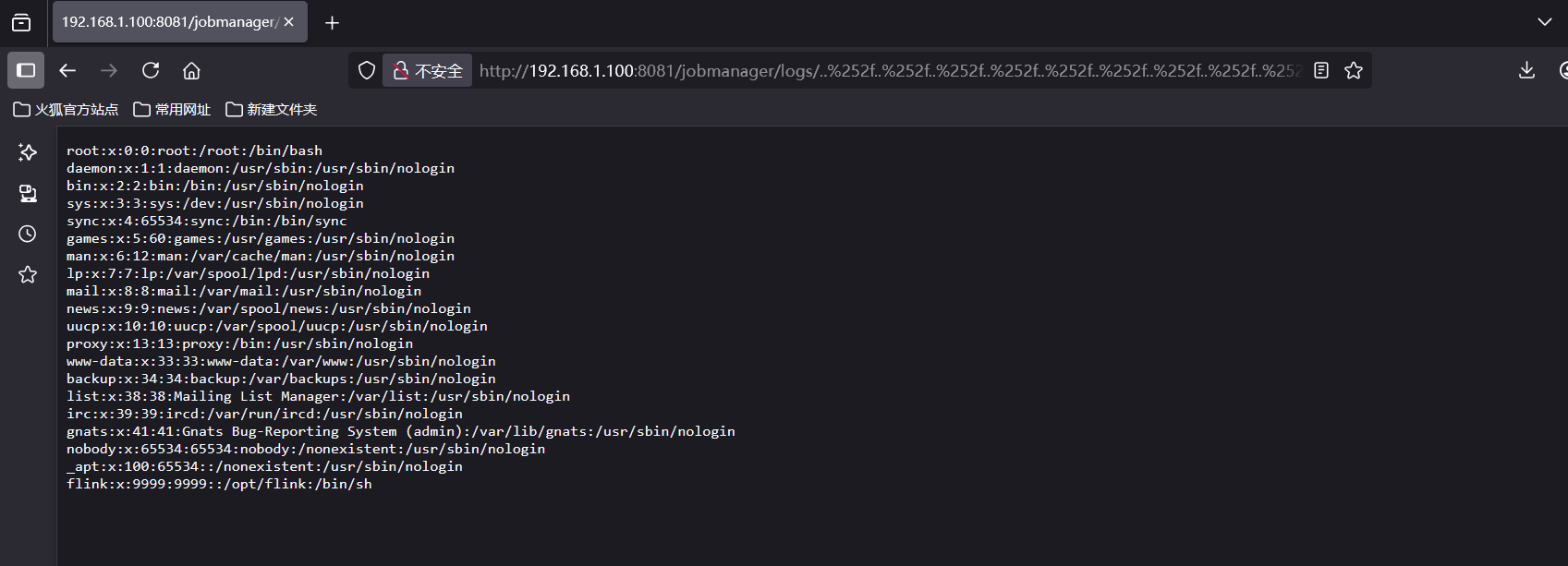
CVE-2020-17519源码分析与漏洞复现(Flink 任意文件读取)
漏洞概览 漏洞名称:Apache Flink REST API 任意文件读取漏洞CVE编号:CVE-2020-17519CVSS评分:7.5影响版本:Apache Flink 1.11.0、1.11.1、1.11.2修复版本:≥ 1.11.3 或 ≥ 1.12.0漏洞类型:路径遍历&#x…...
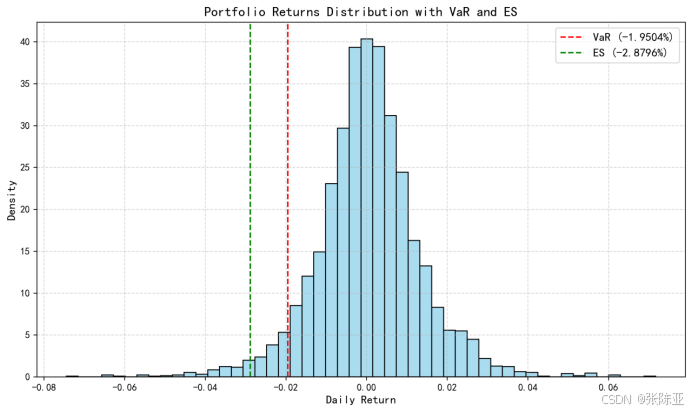
Python基于历史模拟方法实现投资组合风险管理的VaR与ES模型项目实战
说明:这是一个机器学习实战项目(附带数据代码文档),如需数据代码文档可以直接到文章最后关注获取。 1.项目背景 在金融市场日益复杂和波动加剧的背景下,风险管理成为金融机构和个人投资者关注的核心议题之一。VaR&…...
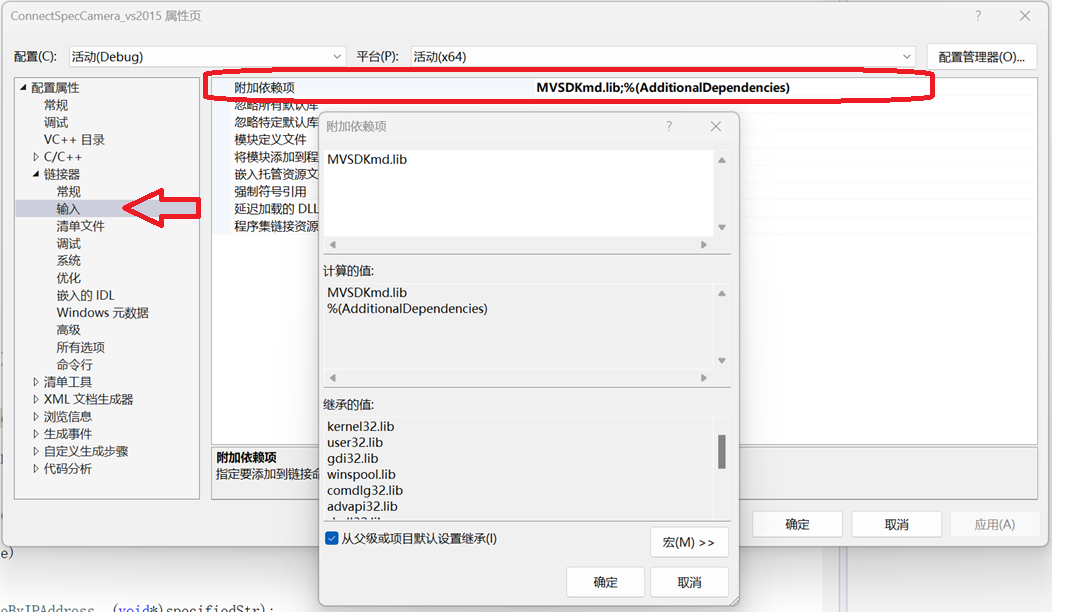
C/C++ 中附加包含目录、附加库目录与附加依赖项详解
在 C/C 编程的编译和链接过程中,附加包含目录、附加库目录和附加依赖项是三个至关重要的设置,它们相互配合,确保程序能够正确引用外部资源并顺利构建。虽然在学习过程中,这些概念容易让人混淆,但深入理解它们的作用和联…...