Ardupilot — EKF3使用光流室内定位代码梳理
文章目录
前言
1 Copter.cpp
1.1 void IRAM_ATTR Copter::fast_loop()
1.2 void Copter::read_AHRS(void)
1.3 对象ahrs说明
2.3 对象EKF3说明
3.2 对象core说明
前言
故事的开始,要从参数 EK3_FLOW_USE 说起。
注意:该参数适用于高级用户。
控制是否将光流数据融合到 24 状态导航估算器或 1 状态地形高度估算器中。
| RebootRequired | Values | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| True |
|
本文主要梳理一下,在旋翼中 EKF3 的整个运行流程,以及在哪一步融合光流数据进行室内定位飞行。
前置参数:
1、AHRS_EKF_TYPE = 3;
使用 EKF3 卡尔曼滤波器进行姿态和位置估算。
2、EK3_GPS_TYPE = 3;
禁止使用 GPS - 当在 GPS 质量较差、多径误差较大的环境中使用光流量传感器飞行时,这一点非常有用。
1 Copter.cpp
1.1 void IRAM_ATTR Copter::fast_loop()
Ardupilot 代码中,需求资源多,运算频率高的任务,一般在 fast_loop() 函数中。这里我们只展示和 EKF3 运行相关的代码段。
运行 EKF 状态估算器(耗资巨大)。
// Main loop - 400hz
void IRAM_ATTR Copter::fast_loop()
{...// run EKF state estimator (expensive)// --------------------read_AHRS();...
}1.2 void Copter::read_AHRS(void)
读取姿态航向参考系统信息的入口函数。
我们告诉 AHRS 跳过 INS 更新,因为我们已经在 fast_loop() 中进行了更新。
void Copter::read_AHRS(void)
{// Perform IMU calculations and get attitude info//-----------------------------------------------
#if HIL_MODE != HIL_MODE_DISABLED// update hil before ahrs updategcs().update_receive();gcs().update_send();
#endif// we tell AHRS to skip INS update as we have already done it in fast_loop()ahrs.update(true);
}1.3 对象ahrs说明
在 Copter.h 中,我们用 AP_AHRS_NavEKF 类定义了 ahrs 对象。
AP_AHRS_NavEKF ahrs{EKF2, EKF3, AP_AHRS_NavEKF::FLAG_ALWAYS_USE_EKF};2 AP_AHRS_NavEKF.cpp
2.1 void AP_AHRS_NavEKF::update(bool skip_ins_update)
所以,我们在跳转 update() 这个成员函数的时候,跳转到 AP_AHRS_NavEKF 类的 update() 函数。
根据 AHRS_EKF_TYPE = 3,我们运行 update_EKF3()。
void AP_AHRS_NavEKF::update(bool skip_ins_update)
{...if (_ekf_type == 2) {// if EK2 is primary then run EKF2 first to give it CPU// priorityupdate_EKF2();update_EKF3();} else {// otherwise run EKF3 firstupdate_EKF3();update_EKF2();}...
}2.2 void AP_AHRS_NavEKF::update_EKF3(void)
更新 EKF3。
void AP_AHRS_NavEKF::update_EKF3(void)
{...if (_ekf3_started) {EKF3.UpdateFilter();...}
}2.3 对象EKF3说明
在 AP_AHRS_NavEKF.h 中,我们用 NavEKF3 类定义了 EKF3 对象。
NavEKF3 &EKF3;3 AP_NavEKF3.cpp
3.1 void IRAM_ATTR NavEKF3::UpdateFilter(void)
所以,我们在跳转 UpdateFilter() 这个成员函数的时候,跳转到 NavEKF3 类的 UpdateFilter() 函数。
更新滤波器状态 - 只要有新的 IMU 数据,就应调用该函数。
// Update Filter States - this should be called whenever new IMU data is available
void IRAM_ATTR NavEKF3::UpdateFilter(void)
{if (!core) {return;}imuSampleTime_us = AP_HAL::micros64();const AP_InertialSensor &ins = AP::ins();bool statePredictEnabled[num_cores];for (uint8_t i=0; i<num_cores; i++) {// if we have not overrun by more than 3 IMU frames, and we// have already used more than 1/3 of the CPU budget for this// loop then suppress the prediction step. This allows// multiple EKF instances to cooperate on schedulingif (core[i].getFramesSincePredict() < (_framesPerPrediction+3) &&(AP_HAL::micros() - ins.get_last_update_usec()) > _frameTimeUsec/3) {statePredictEnabled[i] = false;} else {statePredictEnabled[i] = true;}core[i].UpdateFilter(statePredictEnabled[i]);}...
}3.2 对象core说明
在 AP_NavEKF3.h 中,我们用 NavEKF3_core 类定义了 core 对象。
NavEKF3_core *core = nullptr;4 AP_NavEKF3_core.cpp
4.1 void IRAM_ATTR NavEKF3_core::UpdateFilter(bool predict)
所以,我们在跳转 UpdateFilter() 这个成员函数的时候,跳转到 NavEKF3_core 类的 UpdateFilter() 函数。
如果缓冲区中有新的 IMU 数据,则运行 EKF 方程,在融合时间跨度上进行估算。
/********************************************************
* UPDATE FUNCTIONS *
********************************************************/
// Update Filter States - this should be called whenever new IMU data is available
void IRAM_ATTR NavEKF3_core::UpdateFilter(bool predict)
{...// Check arm status and perform required checks and mode changescontrolFilterModes();...// Run the EKF equations to estimate at the fusion time horizon if new IMU data is available in the bufferif (runUpdates) {// Predict states using IMU data from the delayed time horizonUpdateStrapdownEquationsNED();// Predict the covariance growthCovariancePrediction();// Update states using magnetometer or external yaw sensor dataSelectMagFusion();// Update states using GPS and altimeter dataSelectVelPosFusion();// Update states using range beacon dataSelectRngBcnFusion();// Update states using optical flow dataSelectFlowFusion();// Update states using body frame odometry dataSelectBodyOdomFusion();// Update states using airspeed dataSelectTasFusion();// Update states using sideslip constraint assumption for fly-forward vehiclesSelectBetaFusion();// Update the filter statusupdateFilterStatus();}...
}这里有两个函数和 EKF3 使用光流传感器有关:controlFilterModes(),SelectFlowFusion()。
5 AP_NavEKF3_Control.cpp
5.1 void NavEKF3_core::controlFilterModes()
控制滤波器模式转换。
// Control filter mode transitions
void NavEKF3_core::controlFilterModes()
{...// Set the type of inertial navigation aiding usedsetAidingMode();...
}5.2 void NavEKF3_core::setAidingMode()
设置所使用的惯性导航辅助类型。
我们把飞控连接 QGC,小喇叭会不断的弹出“...stopped aiding”和“...started relative aiding”消息。
根据 AidingMode 的枚举定义,分为三种情况。
1、AID_ABSOLUTE = 0;正在使用 GPS 或其他形式的绝对位置参考辅助(也可同时使用光流),因此位置估算是绝对的。
2、AID_NONE = 1;不使用辅助,因此只有姿态和高度估计值。必须使用 constVelMode 或 constPosMode 来限制倾斜漂移。
3、AID_RELATIVE = 2;只使用光流辅助,因此位置估算值将是相对的。
这里,如果光流传感器数据良好,我们运行 AID_RELATIVE;如果光流数据较差或没有,我们运行 AID_NONE。
// Set inertial navigation aiding mode
void NavEKF3_core::setAidingMode()
{...// 检查我们是否开始或停止援助,并根据需要设置状态和模式// check to see if we are starting or stopping aiding and set states and modes as requiredif (PV_AidingMode != PV_AidingModePrev) {// set various usage modes based on the condition when we start aiding. These are then held until aiding is stopped.switch (PV_AidingMode) {case AID_NONE:// We have ceased aidinggcs().send_text(MAV_SEVERITY_WARNING, "EKF3 IMU%u stopped aiding",(unsigned)imu_index);// When not aiding, estimate orientation & height fusing synthetic constant position and zero velocity measurement to constrain tilt errors// 无辅助时,利用合成恒定位置和零速度测量来估计方位和高度,以限制倾斜误差...case AID_RELATIVE:// We are doing relative position navigation where velocity errors are constrained, but position drift will occur// 我们正在进行相对位置导航,速度误差受到限制,但位置漂移会发生gcs().send_text(MAV_SEVERITY_INFO, "EKF3 IMU%u started relative aiding",(unsigned)imu_index);...
}6 AP_NavEKF3_OptFlowFusion.cpp
6.1 void NavEKF3_core::SelectFlowFusion()
选择性融合光学流量传感器的测量。
// select fusion of optical flow measurements
void NavEKF3_core::SelectFlowFusion()
{...// 将光流数据融合到主滤波器中// Fuse optical flow data into the main filterif (flowDataToFuse && tiltOK) {if (frontend->_flowUse == FLOW_USE_NAV) {// Set the flow noise used by the fusion processesR_LOS = sq(MAX(frontend->_flowNoise, 0.05f));// Fuse the optical flow X and Y axis data into the main filter sequentiallyFuseOptFlow();}// reset flag to indicate that no new flow data is available for fusionflowDataToFuse = false;}...
}6.2 void NavEKF3_core::FuseOptFlow()
依次将光流 X 轴和 Y 轴数据融合到主滤波器中。
首次融合光流传感器数据,会提示:"EKF3 IMU%u fusing optical flow"。
void NavEKF3_core::FuseOptFlow()
{...// notify first time onlyif (!flowFusionActive) {flowFusionActive = true;gcs().send_text(MAV_SEVERITY_INFO, "EKF3 IMU%u fusing optical flow",(unsigned)imu_index);}...
}相关文章:

Ardupilot — EKF3使用光流室内定位代码梳理
文章目录 前言 1 Copter.cpp 1.1 void IRAM_ATTR Copter::fast_loop() 1.2 void Copter::read_AHRS(void) 1.3 对象ahrs说明 2 AP_AHRS_NavEKF.cpp 2.1 void AP_AHRS_NavEKF::update(bool skip_ins_update) 2.2 void AP_AHRS_NavEKF::update_EKF3(void) 2.3 对象EKF3说…...

【Linux】自动化构建工具 —— make/makefileLinux第一个小程序 - 进度条
📝个人主页:Sherry的成长之路 🏠学习社区:Sherry的成长之路(个人社区) 📖专栏链接:Linux 🎯长路漫漫浩浩,万事皆有期待 上一篇博客:Linux编译…...

tensorflow的unet模型
import tensorflow as tf from tensorflow.keras.layers import Input, Conv2D, MaxPooling2D, Dropout, UpSampling2D, concatenate# 定义 U-Net 模型 def unet(input_size(256, 256, 3)):inputs Input(input_size)# 编码器部分conv1 Conv2D(64, 3, activationrelu, padding…...
(2023 最新版)IntelliJ IDEA 下载安装及配置教程
IntelliJ IDEA下载安装教程(图解) IntelliJ IDEA 简称 IDEA,由 JetBrains 公司开发,是 Java 编程语言开发的集成环境,具有美观,高效等众多特点。在智能代码助手、代码自动提示、重构、J2EE 支持、各类版本…...

react 实现拖动元素
demo使用create-react-app脚手架创建 删除一些文件,创建一些文件后 结构目录如下截图com/index import Movable from ./move import { useMove } from ./move.hook import * as Operations from ./move.opMovable.useMove useMove Movable.Operations Operationse…...

【EI会议】第二届声学,流体力学与工程国际学术会议(AFME 2023)
第二届声学,流体力学与工程国际学术会议 2023 2nd International Conference on Acoustics, Fluid Mechanics and Engineering(AFME 2023) 声学、流体力学两个古老的学科发展至今,无时无刻都在影响着我们的生活。小到日常使用的耳…...

Android StringFog 字符串自动加密
一、StringFog 作用 一款自动对dex/aar/jar文件中的字符串进行加密Android插件工具,正如名字所言,给字符串加上一层雾霭,使人难以窥视其真面目。可以用于增加反编译难度,防止字符串代码重复。 支持java/kotlin。支持app打包生成…...
上四休三,未来的期许
近日“少上一天班,究竟香不香”引发关注,英国媒体2月21日报道,一项全世界目前为止参加人数最多的“四天工作制”试验,不久前在英国取得了成功。很多人表示上过四天班之后,给多少钱也回不去五天班的时代了。 来百度APP畅…...

怎么防止360安全卫士修改默认浏览器?
默认的浏览器 原先选项是360极速浏览器(如果有安装的话),我这里改成了Chrome。 先解锁 才能修改。...

调整参数提高mysql读写速度
要提升MySQL的写入速度,您可以采取一些参数调整和优化措施,这些措施可以根据您的具体应用和环境进行调整。以下是一些常见的参数和优化建议: InnoDB存储引擎: 如果您使用的是InnoDB存储引擎,确保以下参数被设置得合理: innodb_buffer_pool_size:增加内存池大小,以便更多…...

Go expvar包
介绍与使用 expvar 是 exposed variable的简写 expvar包[1]是 Golang 官方为暴露Go应用内部指标数据所提供的标准对外接口,可以辅助获取和调试全局变量。 其通过init函数将内置的expvarHandler(一个标准http HandlerFunc)注册到http包ListenAndServe创建的默认Serve…...

Yolo v8代码逐行解读
train.py文件 1.FILE Path(__file__).resolve() __file__代表的是train.py文件,Path(__file__).resolve()结果是train.py文件的绝对路径。 2.ROOT FILE.parents[0] 获得train.py父目录的绝对路径 3.sys.path 是一个列表list,里面包含了已经添加到系…...
9.18号作业
完善登录框 点击登录按钮后,判断账号(admin)和密码(123456)是否一致,如果匹配失败,则弹出错误对话框,文本内容“账号密码不匹配,是否重新登录”,给定两个按钮…...
)
Spring源码阅读(spring-framework-5.2.24)
spring-aop spring-aspects spring-beans spring-context 等等 第一步: Tags spring-projects/spring-framework GitHub 找到相应的release版本 第二步: 下载相应版本的gardle,如何看版本 spring-framework/gradle/wrapper /gradl…...
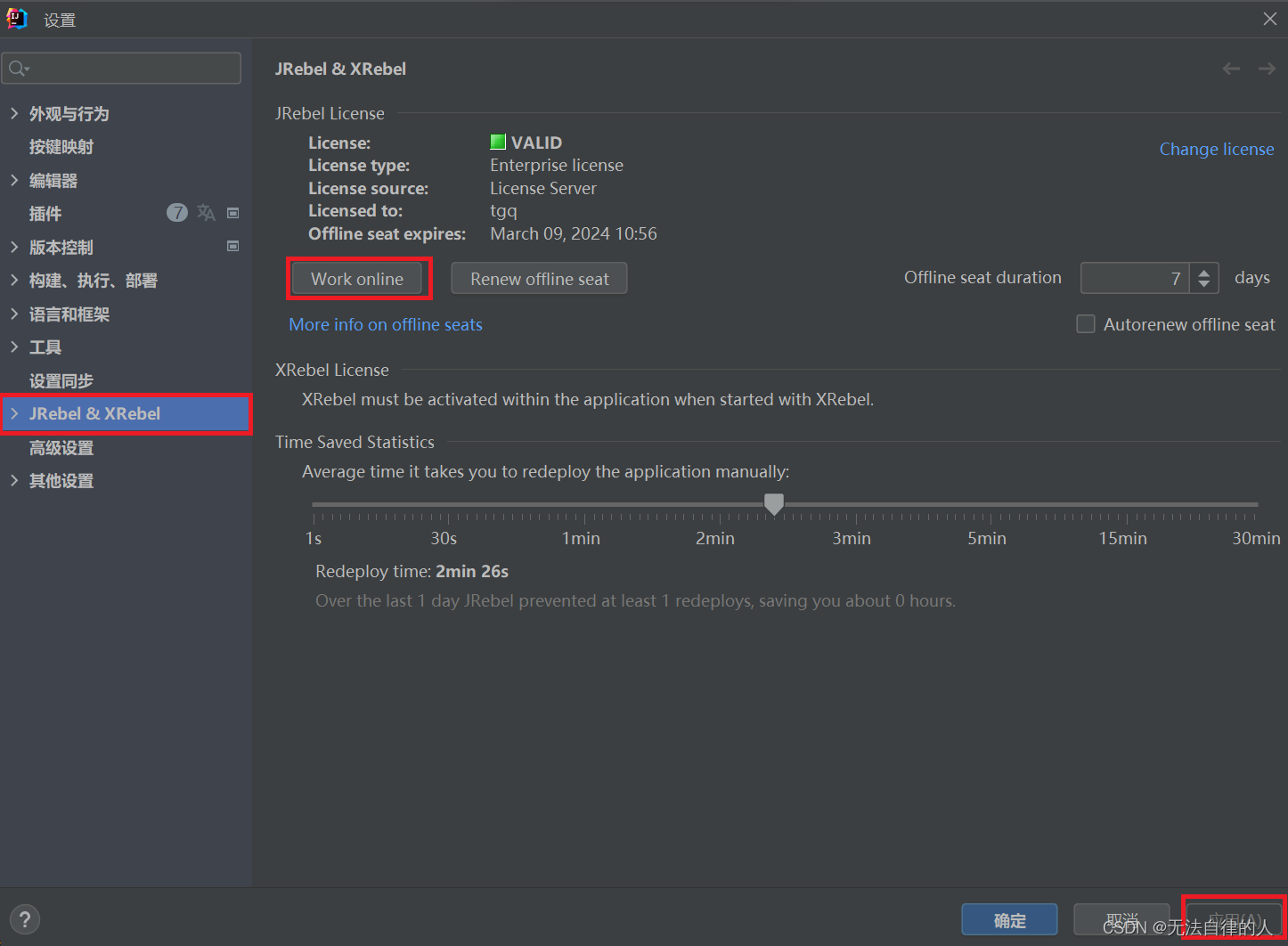
【SpringMVC】文件上传与下载、JREBEL使用
目录 一、引言 二、文件的上传 1、单文件上传 1.1、数据表准备 1.2、添加依赖 1.3、配置文件 1.4、编写表单 1.5、编写controller层 2、多文件上传 2.1、编写form表单 2.2、编写controller层 2.3、测试 三、文件下载 四、JREBEL使用 1、下载注册 2、离线设置 一…...

数据结构 第二章作业 线性表 西安石油大学
在顺序表中插入和删除一个结点需平均移动多少个结点?具体的移动次数取决于 哪两个因素? 在顺序表中插入和删除一个结点时,平均移动的结点数量取决于两个因素:插入/删除位置和当前顺序表的长度。 插入/删除位置:如果要…...

vue.mixin全局混合选项
在Vue.js中,Vue.mixin 是一个用来全局混合(mixin)选项的方法。它允许你在多个组件中共享相同的选项,例如数据、方法、生命周期钩子等。这可以用来在组件之间重复使用一些逻辑或共享一些通用的功能 Vue.mixin({// 在这里定义混合的选项data() {return {s…...
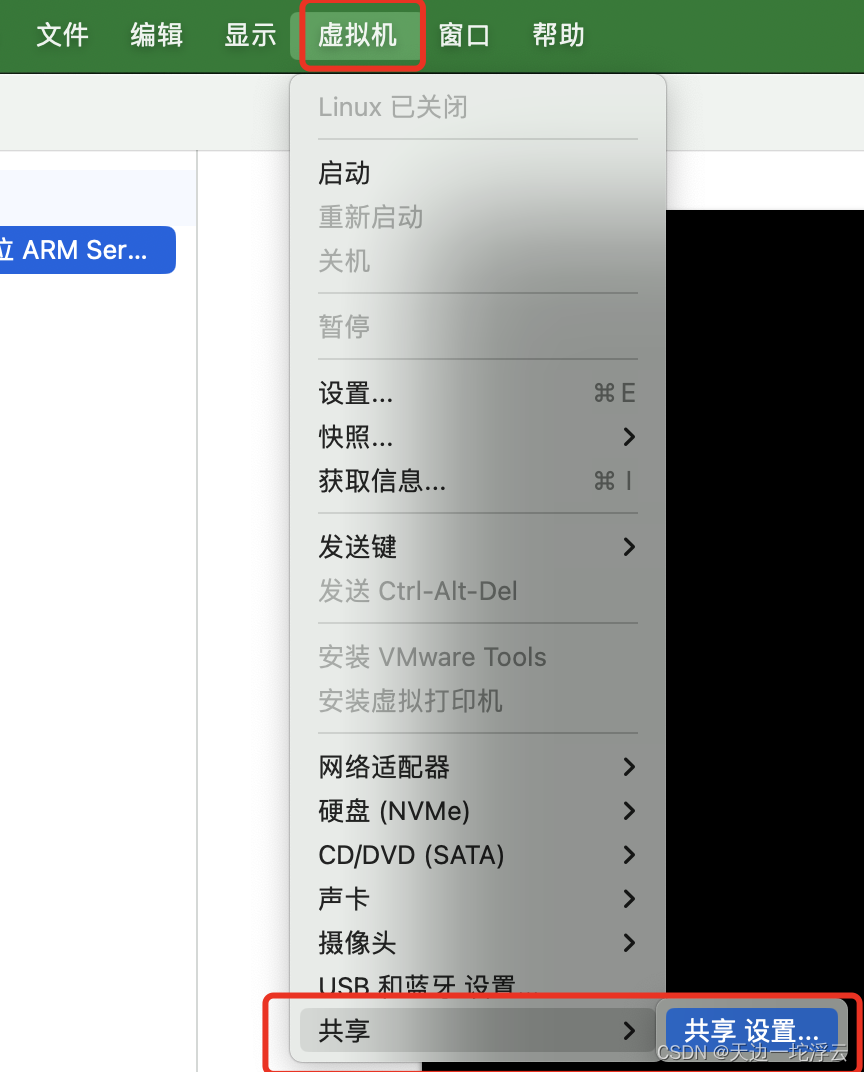
VMware Fusion 13+Ubuntu ARM Server 22.04.3在M2芯片的Mac上共享文件夹
因为Server版没有桌面,VMware Tools不能直接装,导致没办法共享文件。 Ubuntu中的包如果需要更新,先执行下面的步骤 sudo apt update 再执行 sudo apt upgrade 不需要更新的话,直接执行下面的步骤 先把open-vm-tools卸载了 …...

PostgreSQL serial类型
serial类型和序列 postgresql序列号(SERIAL)类型包括 smallserial(smallint,short),serial(int)bigserial(bigint,long long int) 不管是smallserial,serial还是bigserial,其范围都是(1,9223372036854775807)&#…...

【燃烧机】模拟了燃烧机的热力学循环分析活塞动力学以及温度和压力变化对发动机效率的影响【含Matlab源码 15557期】
💥💥💥💥💥💥💥💥💞💞💞💞💞💞💞💞💞Matlab武动乾坤博客之家💞…...

纯血鸿蒙彻底告别安卓依赖:HarmonyOS 7.0 即将正式发布,国产操作系统迎来真正转折点
OpenHarmony 7.0 Beta1已经悄然上线GitCode,开发者体验官招募也同步启动。多数人还在讨论鸿蒙又更新了版本,但很少有人注意到这次更新的核心变化:纯血鸿蒙终于移除了对Android APK兼容层的依赖。这仅仅是一次常规版本迭代吗?还是国…...

文档即代码?Claude API文档自动化生成全链路拆解,5步接入CI/CD流水线
更多请点击: https://codechina.net 第一章:文档即代码:Claude API文档自动化生成的核心范式 将API文档视为可版本化、可测试、可部署的一等公民,是现代AI服务工程化的关键跃迁。Claude API的文档不再由人工撰写后静态发布&#…...

无人机地面站软件完全指南:Mission Planner 新手快速上手教程
无人机地面站软件完全指南:Mission Planner 新手快速上手教程 【免费下载链接】MissionPlanner Mission Planner Ground Control Station for ArduPilot (c# .net) 项目地址: https://gitcode.com/gh_mirrors/mi/MissionPlanner Mission Planner 是一款功能强…...

3步告别资源焦虑:跨平台下载神器res-downloader深度解析
3步告别资源焦虑:跨平台下载神器res-downloader深度解析 【免费下载链接】res-downloader 视频号、小程序、抖音、快手、小红书、直播流、m3u8、酷狗、QQ音乐等常见网络资源下载! 项目地址: https://gitcode.com/GitHub_Trending/re/res-downloader 你是否曾…...

递归函数详解
递归函数详解——用递归改写谭浩强《C 程序设计》经典例题 📚 基于谭浩强《C 程序设计》经典例题 💡 一套代码看懂递归的本质与应用 🎯 适合 C 语言进阶学习者 📋 目录 1. 递归函数入门基础 2. 递归的三要素 3. 经典例题递归改写 4. 递归进阶应用 [5. 递归 vs 迭代对比…...

终极指南:如何用BepInEx配置管理器轻松掌控所有游戏模组设置
终极指南:如何用BepInEx配置管理器轻松掌控所有游戏模组设置 【免费下载链接】BepInEx.ConfigurationManager Plugin configuration manager for BepInEx 项目地址: https://gitcode.com/gh_mirrors/be/BepInEx.ConfigurationManager 你是否厌倦了在游戏模组…...

3大核心突破:用PDFPatcher重塑你的PDF工作流效率
3大核心突破:用PDFPatcher重塑你的PDF工作流效率 【免费下载链接】PDFPatcher PDF补丁丁——PDF工具箱,可以编辑书签、剪裁旋转页面、解除限制、提取或合并文档,探查文档结构,提取图片、转成图片等等 项目地址: https://gitcode…...

基于qstock的北向资金量化分析框架构建与策略应用
基于qstock的北向资金量化分析框架构建与策略应用 【免费下载链接】qstock qstock由“Python金融量化”公众号开发,试图打造成个人量化投研分析包,目前包括数据获取(data)、可视化(plot)、选股(stock)和量化回测(策略b…...

Claude处理1000+页合同文档的7步标准化流程:从乱码识别到条款抽取全链路实操
更多请点击: https://kaifayun.com 第一章:Claude处理1000页合同文档的7步标准化流程总览 面对动辄上千页的复杂商业合同(如并购协议、跨境服务主协议、多层分包合同包),人工审阅极易遗漏关键条款、时效性差且难以复现…...