激光雷达在ADAS测试中的应用与方案

在科技高速发展的今天,汽车智能化已是必然的趋势,且自动驾驶汽车的研究也在世界范围内进行得如火如荼。而在ADAS测试与开发中,激光雷达以其高性能和高精度占据着非常重要的地位,它是ADAS测试与开发中不可缺少的组成。
一 激光雷达介绍
| 激光雷达原理
1. 全称
激光雷达(英文:Lidar),英文全称为Laser Detecting and Ranging,即激光探测和测距。
2. 探测原理
激光发射器发射激光脉冲,计时器记录发射时间;脉冲经物体反射后由接收器接受,计时器记录接受时间,距离d= (Δt*c) /2。

之后再通过水平旋转扫描来测角度,并根据角度和距离这两个参数来建立二维的极坐标系,然后通过获取不同的俯仰角度信号来获得三维中的高度信息,由此不仅可探测到周围环境的空间三维位置,还可根据探测到的信息来进行三维建模。

高频激光可在一秒内获取大量(约150万个)的位置点信息(称为点云)。除了可获取位置信息外,激光信号的反射率还可区分目标物质的不同材质。
| 主流激光雷达品牌
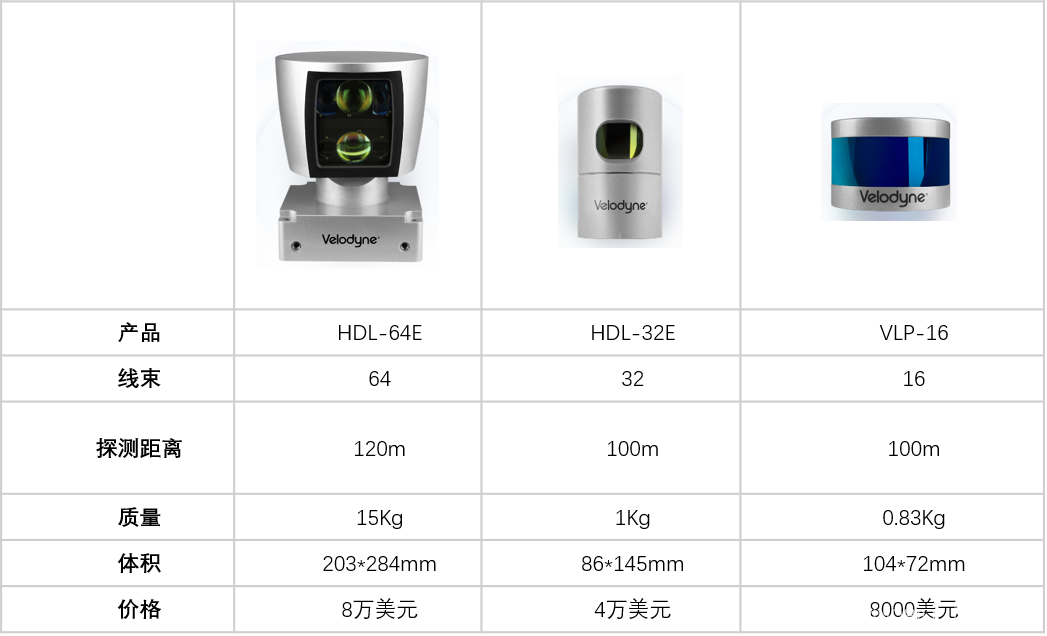
1. Velodyne
特点:精度高;范围广,可360°探测;抗干扰能力强。具有优秀的性能,但价格昂贵。
以在全球位居前列的激光雷达制造厂商Velodyne为例:
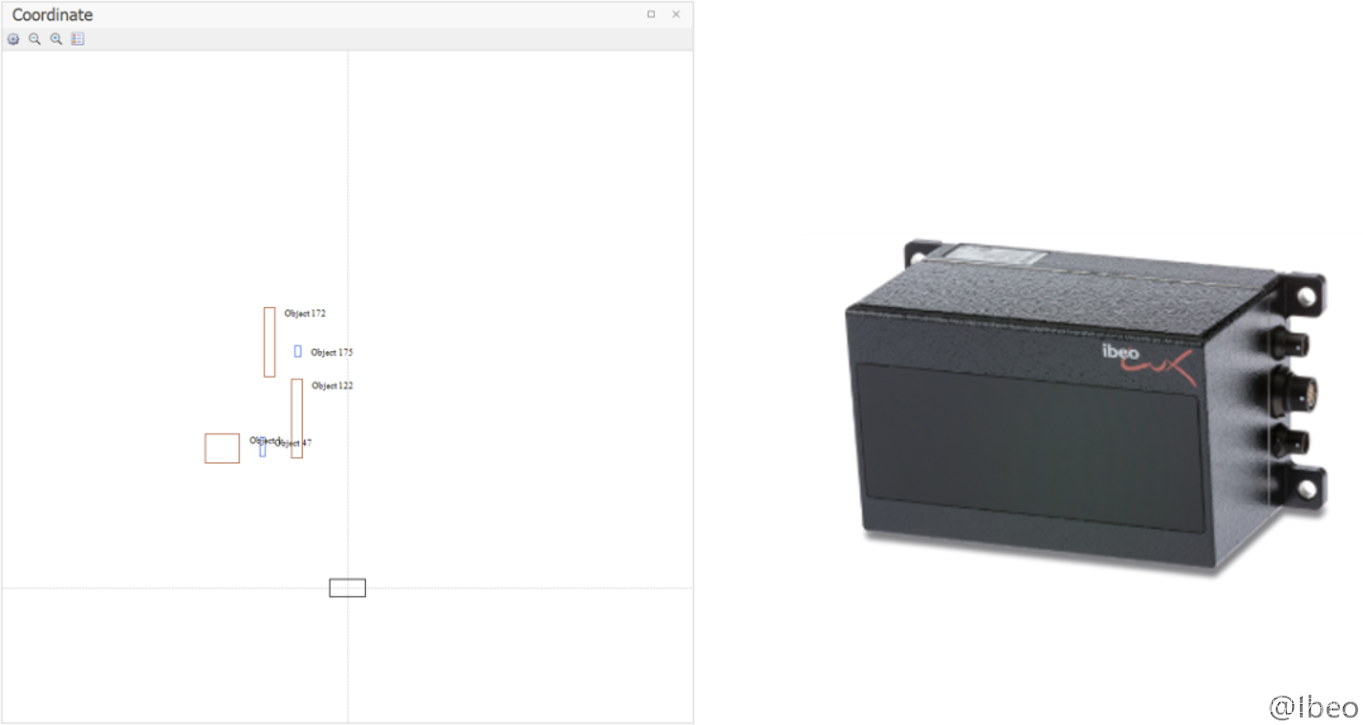
2. Ibeo
特点:可识别障碍物类型,如行人、汽车或大卡车等。可输出障碍物俯视图轮廓、目标物体位置和运动信息参数。

| 激光雷达数据
在实际的无人驾驶系统中,每一帧的数据都会有时间戳,需根据时间戳进行后续和时间有关的计算。因此,N线激光雷达的点云数据结构如下图所示。

二 激光雷达在ADAS测试中的应用与作用
激光雷达在无人驾驶运用中拥有几个核心作用——周围环境3D建模、高精度定位以及障碍物检测与分类识别。
| 障碍物的检测和分类
激光雷达在扫描的过程中,首先识别障碍物,明确障碍物在空间中的位置,再根据存在的障碍物来进行分类。例如,我们将像车、人这些障碍物分割成为独立的个体,通过分割出来的独立个体再去匹配,从而进行障碍物的分类和物体的跟踪。而跟踪的过程是先分割点云,再通过点云做关联目标,如此一来,我们便能判断出上一桢和下一桢是否属于同一个物体,以便再进行目标跟踪,然后输出目标跟踪信息。

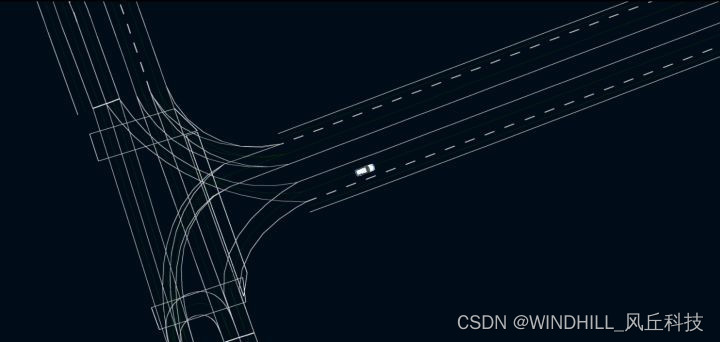
| 高精度电子地图制图与定位
利用多线激光雷达的点云信息与地图采集车载组合惯导的信息来进行高精度地图的制作。自动驾驶汽车通过激光点云信息与高精度地图两者相匹配来实现高精度定位。
三 激光雷达数据采集、存储与分析
| 激光雷达数据采集
在ADAS测试中,一辆车上一般需装载多个激光雷达、多个毫米波雷达和多个摄像头,且数据将通过以太网或CAN FD等数据类型来进行输出。而风丘科技推出的ADAS测试方案可同时对多路雷达、视频、车辆总线和数采等多种数据进行采集、在线显示与存储。
1. 硬件:高性价比工控机

• 配置:inter i7-8700T CPU、32GB RAM、Win10操作系统
• 接口:3 Video、6 USB
3*1GB ETH、2 RS-232
8 I/O、Audio、1 CAN
可扩展的Pcle接口(CAN、LIN)
• 工作温度:-40~70℃
• 2个可热插拔的移动硬盘卡槽
• 单个硬盘可支持1TB存储
• 支持WiFi、4G、LTE等无线通讯
• 9~48V车载供电
2. 软件:Q-Vision
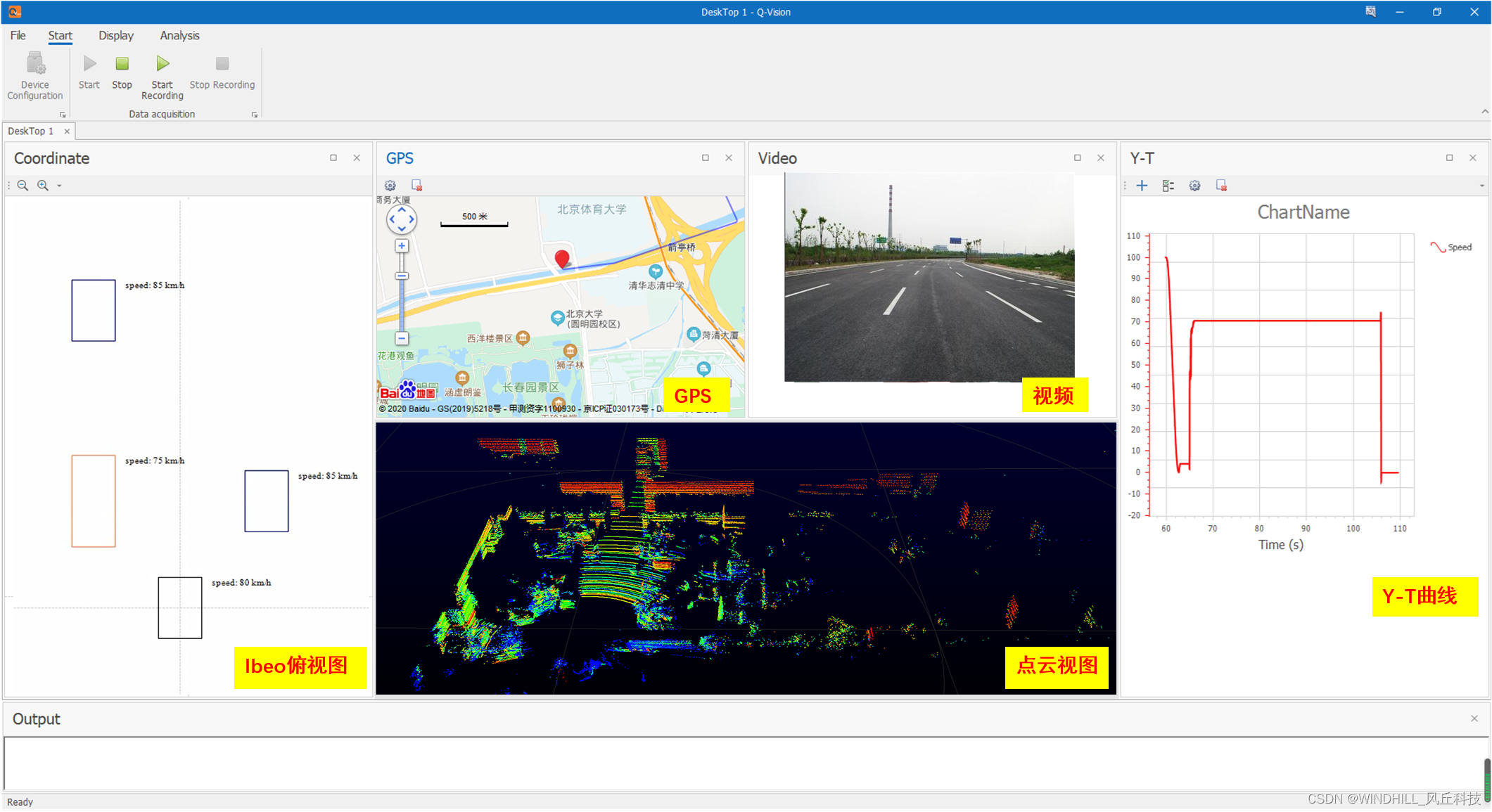
• 支持CAN/LIN/CAN FD/ETH等多种信号采集
• 支持雷达点云图、雷达俯视图、地图轨迹、视频、CAN总线和y-t等多种视图显示
• 支持Kvaser、Vector、Softing和NI等多种CAN硬件
• 支持Velodyne、Ibeo等知名雷达传感器
......
请点击此处,查看剩余25%精彩内容!
| 往期回顾
▶ ADAS测试方案
▶ IPETRONIK数据采集设备携手Softing Q-Vision软件致力于ADAS测试方案
相关文章:
激光雷达在ADAS测试中的应用与方案
在科技高速发展的今天,汽车智能化已是必然的趋势,且自动驾驶汽车的研究也在世界范围内进行得如火如荼。而在ADAS测试与开发中,激光雷达以其高性能和高精度占据着非常重要的地位,它是ADAS测试与开发中不可缺少的组成。 一 激光雷达…...

malloc与free
目录 前提须知: malloc: 大意: 头文件: 申请空间: 判断是否申请成功: 使用空间: 结果: 整体代码: malloc申请的空间怎么回收呢? 注意事项: free:…...

计算周包材,日包材用来发送给外围系统
文章目录 1 Introduction2 code 1 Introduction In this example We get data from BOM and RESB . and calculate it . 2 code TYPES: BEGIN OF TY_ZPPT_0015_W,AUFNR TYPE ZPPT_0015-AUFNR,ZXH TYPE ZPPT_0015-ZXH,ZZJHID TYPE ZPPT_0015-ZZJHID,ZRJHID TYPE Z…...
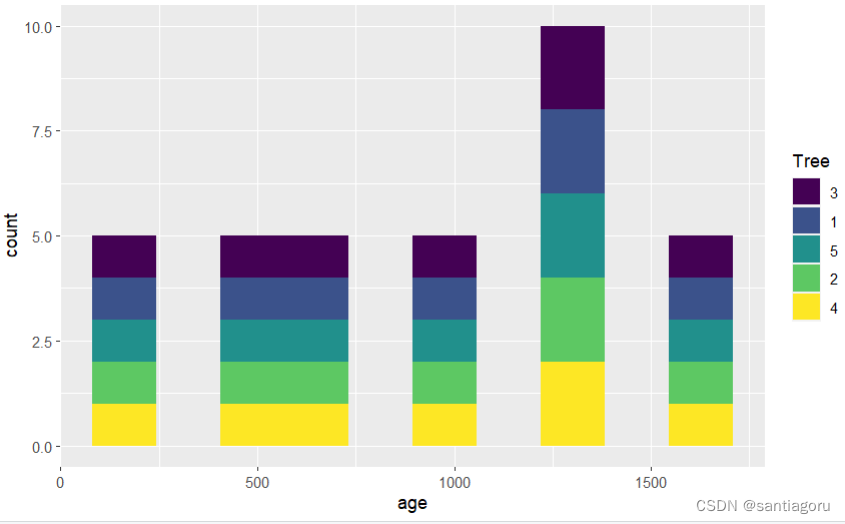
R语言柱状图直方图 histogram
柱状图简介 柱状图也叫直方图,是展示连续性数值的分布状况。在x轴上将连续型数值分为一定数量的组,y轴显示对应值的频数。 R基本的柱状图 hist 我们用R自带的Orange数据来画图。 > head(Orange)Tree age circumference(圆周长) 1 1 118 …...

Linux磁盘管理:最佳实践
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...
uni-app:通过三目运算动态增加样式效果(class)
效果 代码 第一条:当变量line的值等于abc时,class就等于yes,反之class等于no(显然等于abc,执行yes,前景色为红色) 第一条:当变量line1的值等于abc时,class就等于yes,反之class等于noÿ…...

API安全
1 API的简介 API代表应用程序编程接口,它由一组允许软件组件进行通信的定义和协议组成。作为软件系统之间的中介,API使软件应用程序或服务能够共享数据和功能。但是API不仅仅提供连接基础,它还管理软件应用程序如何被允许进行通信和交互。API控制程序之间交换请求的类型、请…...

手写一个翻页功能
最近在对接海康摄像头,需要写一个翻页得功能,于是乎就想到了手写,然后就记录一下。在vue项目里写的 <img:src"require()"alt""click"onNext(delete)"/><img:src"require()"alt""…...
element show-overflow-tooltip 复制
el-table-column的show-overflow-tooltip弹出的提示无法复制,官方也暂时不准备解决,可以自己模拟一个 <el-table-column label"支付单号" width"100"><template #default"{ row }"><el-tooltip :content&…...

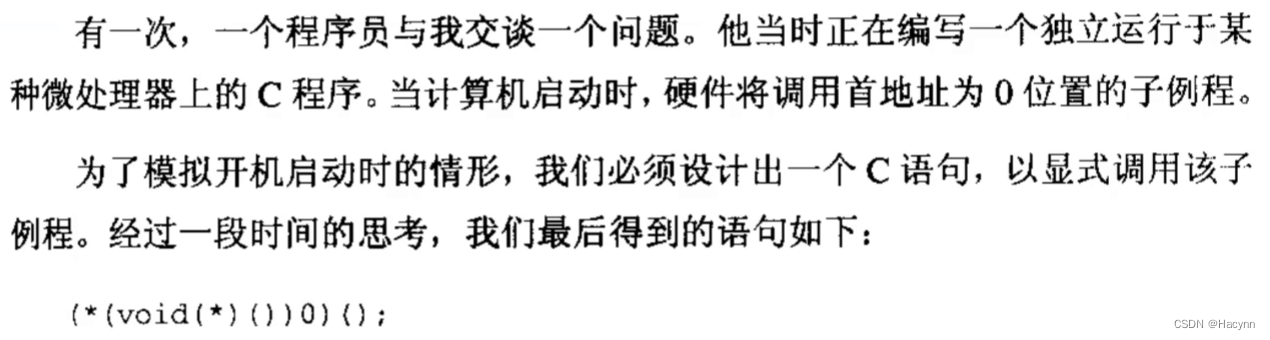
【C语言】指针的进阶(三)—— 模拟实现qsort函数以及指针和数组的笔试题解析
目录 1、模拟实现qsort函数 1.1、qsort函数的回顾 1.2、模拟实现qsort函数 2、指针和数组笔试题解析 2.1、一维数组 2.2、字符数组 1、模拟实现qsort函数 1.1、qsort函数的回顾 要模拟实现qsort函数,就要了解清楚qsort函数的参数以及使用方式。 我们先回顾一…...

Python 图像处理库PIL ImageOps笔记
# 返回一个指定大小的裁剪过的图像。该图像被裁剪到指定的宽高比和尺寸。 # 变量size是要求的输出尺寸,以像素为单位,是一个(宽,高)元组 # bleed:允许用户去掉图像的边界(图像四个边界ÿ…...

全球南方《乡村振兴战略下传统村落文化旅游设计》许少辉八一新枝——2023学生开学季辉少许
全球南方《乡村振兴战略下传统村落文化旅游设计》许少辉八一新枝——2023学生开学季辉少许...
【C语言】指针的进阶(一)
目录 前言 1. 字符指针 2. 指针数组 3. 数组指针 3.1 数组指针的定义 3.2 &数组名VS数组名 3.3 数组指针的使用 4. 数组参数、指针参数 4.1 一维数组传参 4.2 二维数组传参 4.3 一级指针传参 4.4 二级指针传参 5. 函数指针 前言 指针在C语言中可谓是有着举足轻重的…...
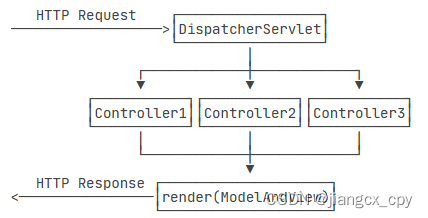
Spring学习(三):MVC
一、什么是MVC MVC(Model-View-Controller)是一种软件设计模式,用于组织和管理应用程序的代码结构。它将应用程序分为三个主要部分,即模型(Model)、视图(View)和控制器(…...
排查disabled问题之谷歌新版本特性
问题复现 最近我突然接手一个后台的bug,这个后台很久没有迭代更新了,我也不熟悉业务,所以只能看一下源码,问题很快就复现,测试的修复操作也很正确,就是因为渲染的input标签中存在disableddisabled’属性导…...

三、开发工具
开发工具 开发工具1.1.熟悉IDEA1.2.下载IDEA1.3.IDEA中文插件1.4.IDEA输出中文乱码1.5.使用IDEA —————————————————————————————————————————————————— —————————————————————————————————…...
, -1)---tensor张量第一维保持不变,其余维度展平)
代码解读:y.view(y.size(0), -1)---tensor张量第一维保持不变,其余维度展平
y.view(y.size(0), -1)代码解读: 用于改变PyTorch张量(tensor)y的形状的。 y.size(0)返回y的第一维的大小。 -1表示让PyTorch自动计算该维度的大小,以确保新的张量与原始张量有相同的元素数量。 功能:将y的第一维保持…...
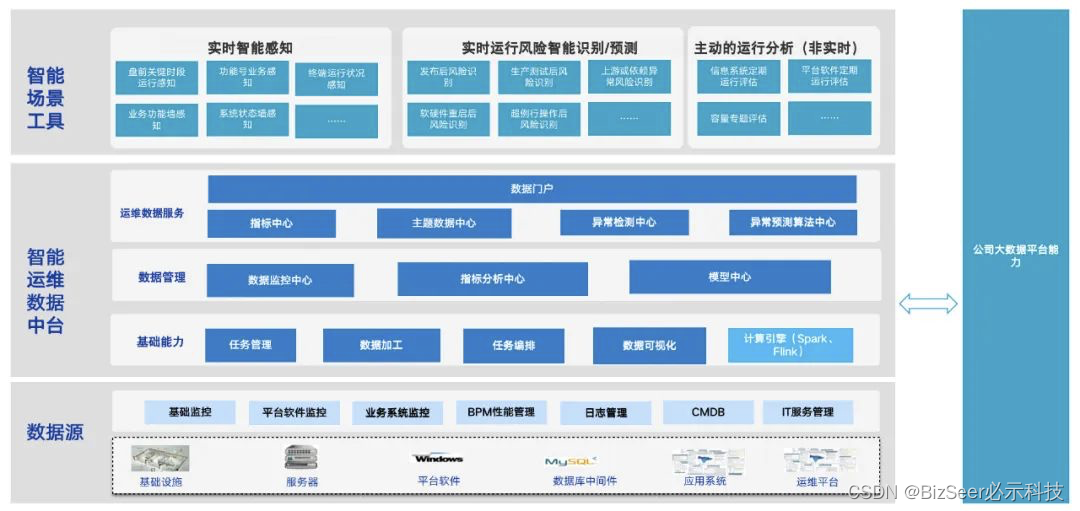
必示科技赋能广发证券运维数字化实践案例,入选信通院《中国AIOps现状调查报告(2023)》
近期,“必示科技赋能广发证券运维数字化实践,打造智能运维数据中台”合作案例被中国信息通信研究院作为优秀金融案例项目,收录在最新的《中国AIOps现状调查报告(2023)》(金融行业仅3家)。 以必…...
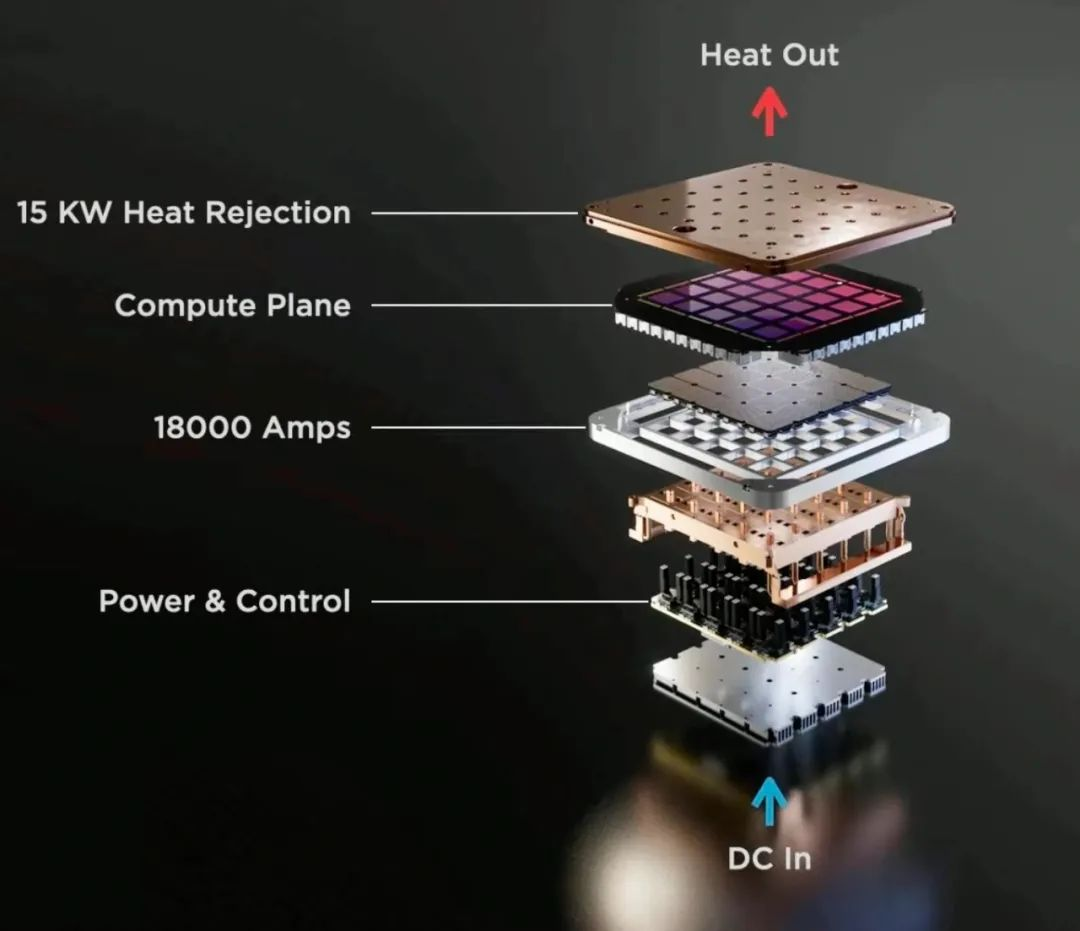
特斯拉Dojo超算:AI训练平台的自动驾驶与通用人工智能之关键
特斯拉公开Dojo超算架构细节,AI训练算力平台成为其自动驾驶与通用人工智能布局的关键一环 在近日举行的Hot Chips 34会议上,特斯拉披露了其自主研发的AI超算Dojo的详细信息。Dojo是一个可定制的超级计算机,从芯片到系统全部由特斯拉自主设计…...

Linux中的一些常用命令
1.查看Linux系统中自带的GLIBC版本 ldd --version2.Linux中删除文件的命令 在Linux中,删除文件的命令是 rm。 使用 rm 命令时,请小心使用,因为它将直接删除文件,而不会将其移动到回收站。 以下是 rm 命令的一些常用选项&#…...

Docker 离线安装指南
参考文章 1、确认操作系统类型及内核版本 Docker依赖于Linux内核的一些特性,不同版本的Docker对内核版本有不同要求。例如,Docker 17.06及之后的版本通常需要Linux内核3.10及以上版本,Docker17.09及更高版本对应Linux内核4.9.x及更高版本。…...

零门槛NAS搭建:WinNAS如何让普通电脑秒变私有云?
一、核心优势:专为Windows用户设计的极简NAS WinNAS由深圳耘想存储科技开发,是一款收费低廉但功能全面的Windows NAS工具,主打“无学习成本部署” 。与其他NAS软件相比,其优势在于: 无需硬件改造:将任意W…...
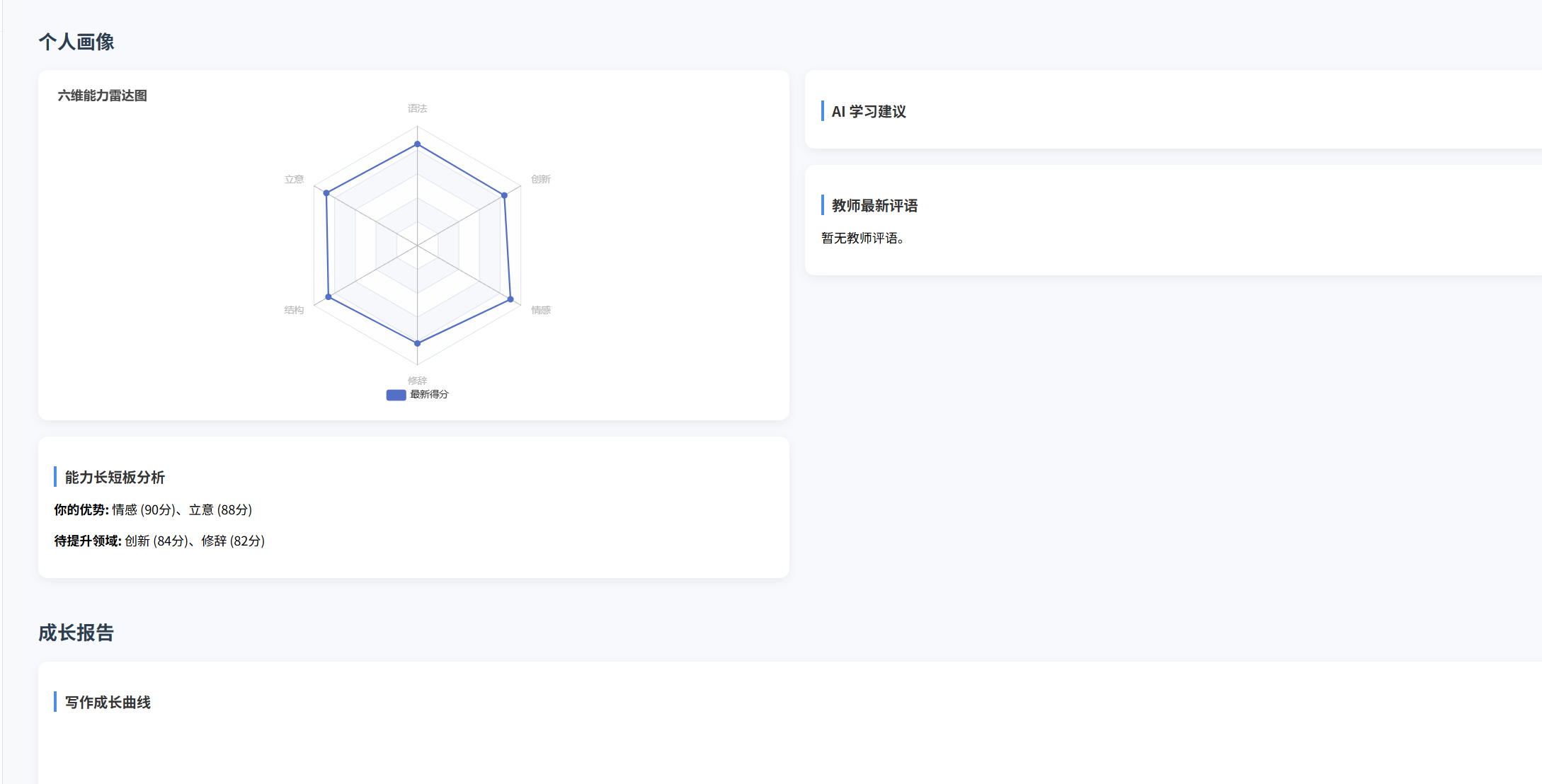
(十)学生端搭建
本次旨在将之前的已完成的部分功能进行拼装到学生端,同时完善学生端的构建。本次工作主要包括: 1.学生端整体界面布局 2.模拟考场与部分个人画像流程的串联 3.整体学生端逻辑 一、学生端 在主界面可以选择自己的用户角色 选择学生则进入学生登录界面…...
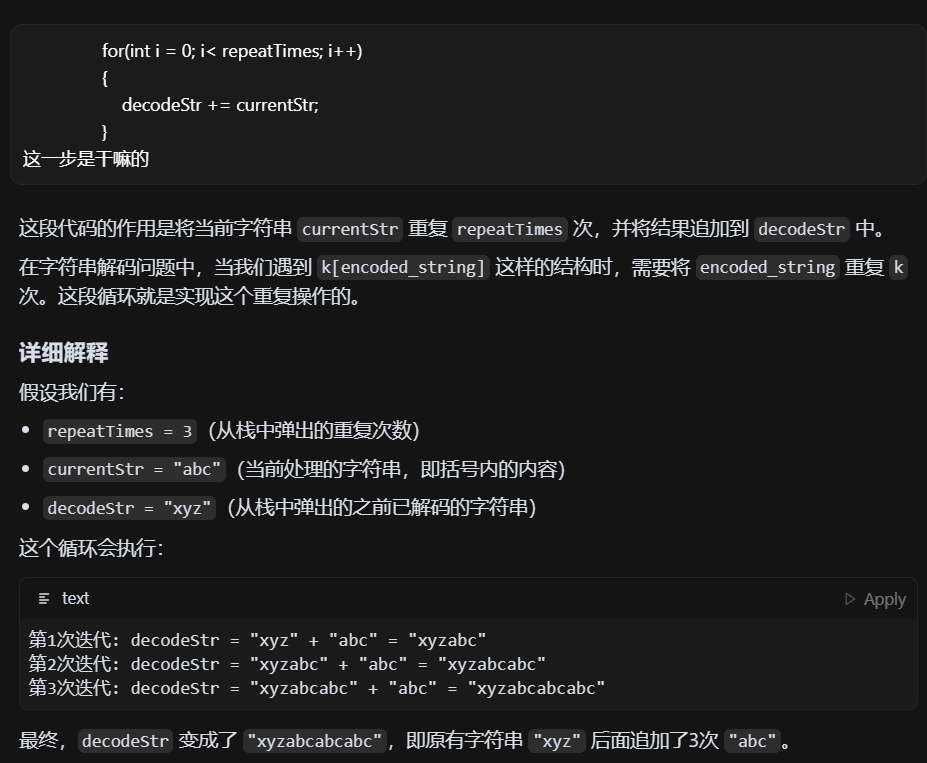
LeetCode - 394. 字符串解码
题目 394. 字符串解码 - 力扣(LeetCode) 思路 使用两个栈:一个存储重复次数,一个存储字符串 遍历输入字符串: 数字处理:遇到数字时,累积计算重复次数左括号处理:保存当前状态&a…...
)
python爬虫:Newspaper3k 的详细使用(好用的新闻网站文章抓取和解析的Python库)
更多内容请见: 爬虫和逆向教程-专栏介绍和目录 文章目录 一、Newspaper3k 概述1.1 Newspaper3k 介绍1.2 主要功能1.3 典型应用场景1.4 安装二、基本用法2.2 提取单篇文章的内容2.2 处理多篇文档三、高级选项3.1 自定义配置3.2 分析文章情感四、实战案例4.1 构建新闻摘要聚合器…...
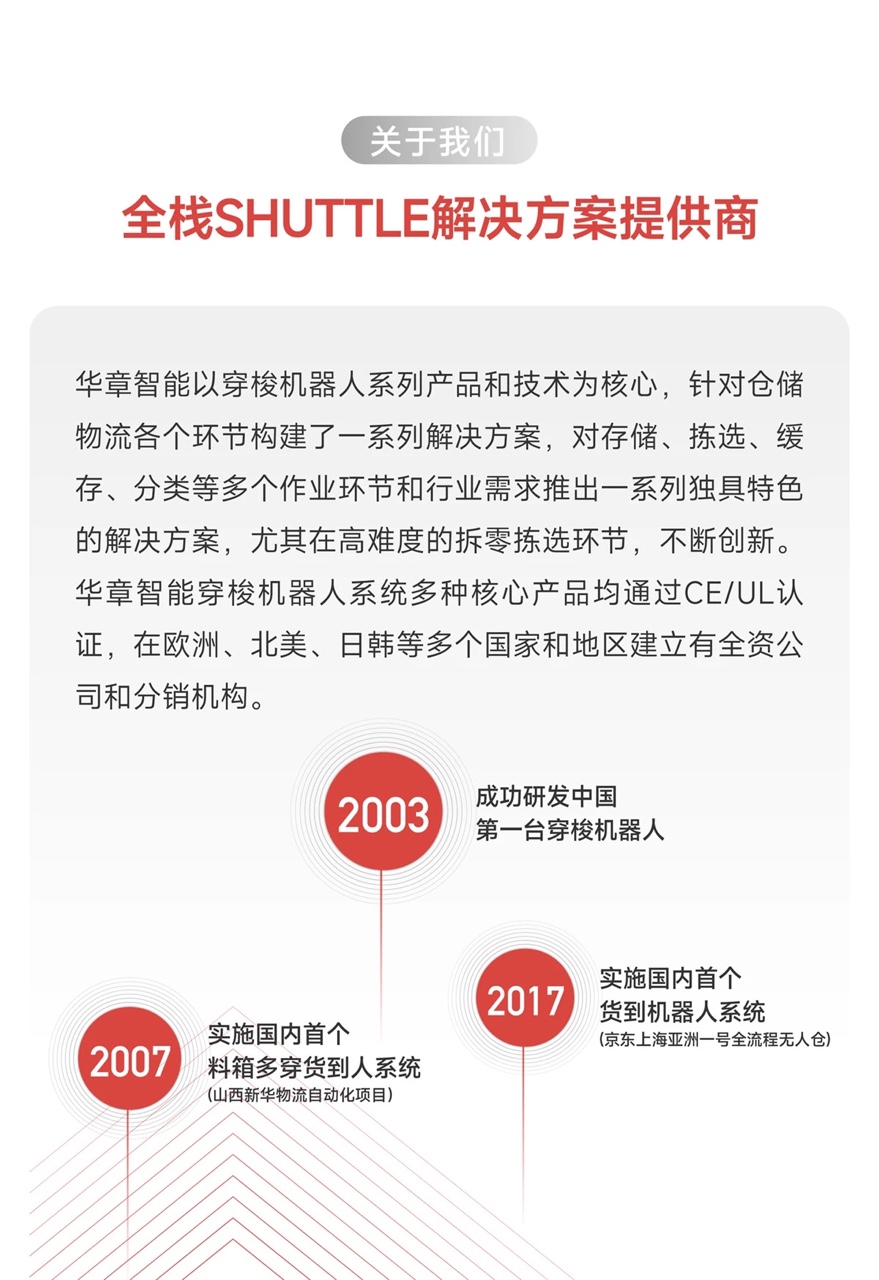
智能仓储的未来:自动化、AI与数据分析如何重塑物流中心
当仓库学会“思考”,物流的终极形态正在诞生 想象这样的场景: 凌晨3点,某物流中心灯火通明却空无一人。AGV机器人集群根据实时订单动态规划路径;AI视觉系统在0.1秒内扫描包裹信息;数字孪生平台正模拟次日峰值流量压力…...
)
OpenLayers 分屏对比(地图联动)
注:当前使用的是 ol 5.3.0 版本,天地图使用的key请到天地图官网申请,并替换为自己的key 地图分屏对比在WebGIS开发中是很常见的功能,和卷帘图层不一样的是,分屏对比是在各个地图中添加相同或者不同的图层进行对比查看。…...
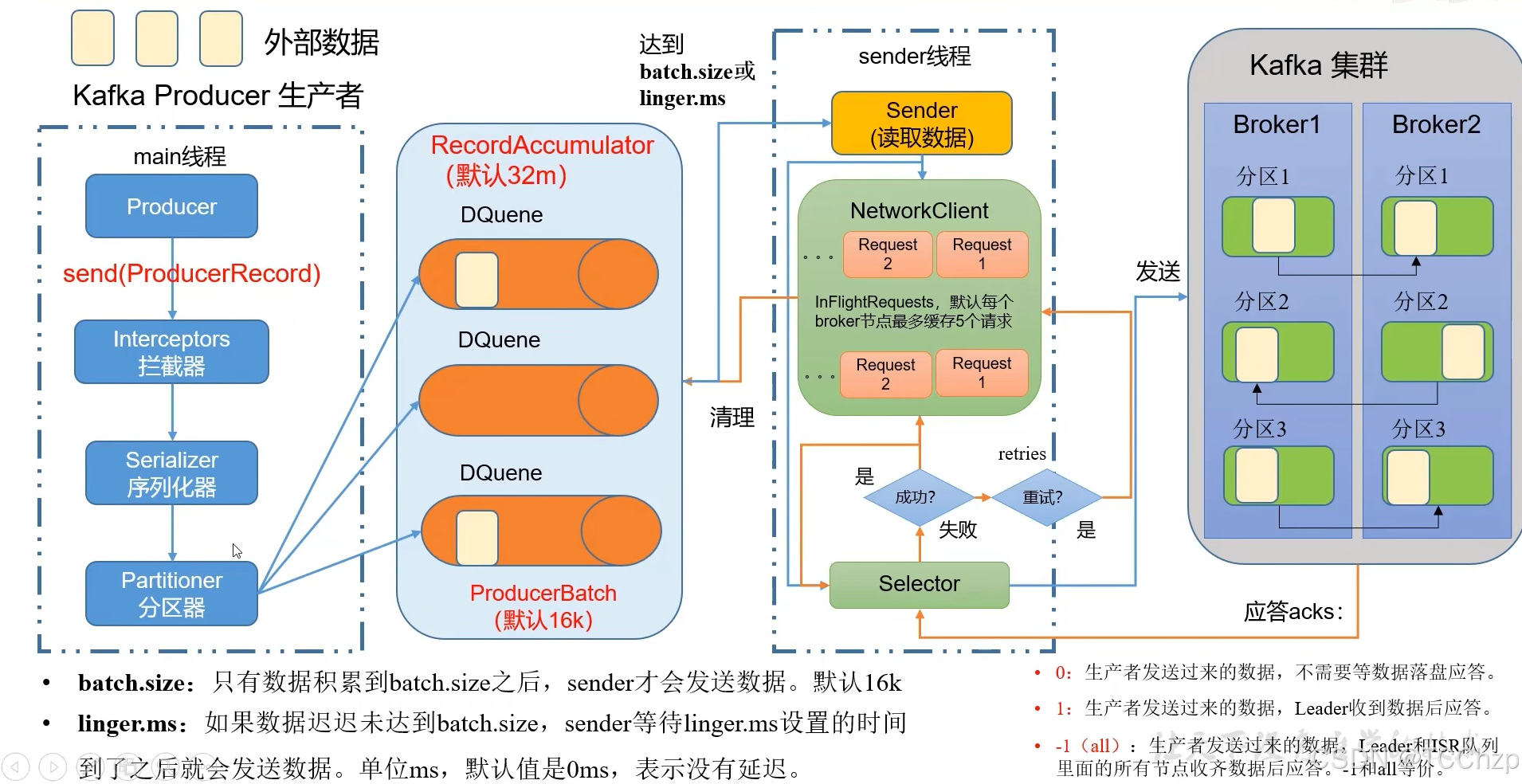
Kafka入门-生产者
生产者 生产者发送流程: 延迟时间为0ms时,也就意味着每当有数据就会直接发送 异步发送API 异步发送和同步发送的不同在于:异步发送不需要等待结果,同步发送必须等待结果才能进行下一步发送。 普通异步发送 首先导入所需的k…...

LCTF液晶可调谐滤波器在多光谱相机捕捉无人机目标检测中的作用
中达瑞和自2005年成立以来,一直在光谱成像领域深度钻研和发展,始终致力于研发高性能、高可靠性的光谱成像相机,为科研院校提供更优的产品和服务。在《低空背景下无人机目标的光谱特征研究及目标检测应用》这篇论文中提到中达瑞和 LCTF 作为多…...
【深度学习新浪潮】什么是credit assignment problem?
Credit Assignment Problem(信用分配问题) 是机器学习,尤其是强化学习(RL)中的核心挑战之一,指的是如何将最终的奖励或惩罚准确地分配给导致该结果的各个中间动作或决策。在序列决策任务中,智能体执行一系列动作后获得一个最终奖励,但每个动作对最终结果的贡献程度往往…...