在gazebo仿真环境中加载多个机器人
文章目录
- 前言
- 一、基本概念
- 1、xacro
- 2、Gazebo 加载单个机器人模型
- 二、原先launch文件代码
- 三、 修改launch文件加载多个机器人
- 总结
前言
单个机器人的各项仿真实验都基本完成,也实现了远程控制,接下来主要对多机器人编队进行仿真实验,在进行多机器人编队控制前,先要在gazebo仿真中加载多个机器人。
一、基本概念
在gazebo中添加多个机器人需要写或修改launch文件,通过在网上翻看别人的代码,大致明白了调用gazebo仿真launch文件中各部分代码的意思。下面是一些最最基本的概念,在修改launch前稍微了解一下。
1、xacro
类似于函数实现,提高代码复用率,优化代码结构,提高安全性
(1)宏定义
<xacro:macro name="宏名称" params="参数列表(多参数之前使用空格分隔)">
....参数调用格式:${参数名}
</xacro:macro>
(2)宏调用
<xacro:宏名称 参数1=xxx 参数2=xxx/>
(3)文件包含
机器人由多部件组成,不同部件可能封装为单独的xacro文件,最后再将不同的文件集成,组合为完整机器人,可以使用文件包含实现。
<robot name="xxx" xmls:xacro="http://wiki.ros.org/xacro"><xacro:include filename="my_base.xacro"><xacro:include filename="my_camera.xacro"><xacro:include filename="my_laser.xacro">....
</robot>
在launch文件中直接加载xacro的方法
command="$(find xacro)/xacro $(find 文件名)/urdf/.urdf.xacro(文件名)"
2、Gazebo 加载单个机器人模型
<launch><!-- 将Urdf文件的内容加载到参数服务器--><param name="robot_description"textfile=“$(find文件夹名)/urdf/.urdf文件“><!--启动gazebo--><include file="$(find gazebo_ros)/launch/empty_world.launch"/><!--在gazebo中显示机器人模型--><node pkg="gazebo_ros"type="spawn_model"name="model"args="-urdf-model mycar-param robot_description"/></launch>
二、原先launch文件代码
在大致看了上述的说明后就能看懂,在gazebo仿真环境中加载一个机器人的launch文件了。

复制粘贴如下:根据上面的基本概念可以大概的明白代码所描述的内容。
(如我在图中添加的注释)
<launch>
<!--在所提供的burger, waffle, waffle_pi三种机器人呢模型中选择要加载的类型--><arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/> <!--设置机器人的x,y,z坐标,相当于宏定义方面下面使用和后面的修改--><arg name="x_pos" default="-2.0"/><arg name="y_pos" default="-0.5"/><arg name="z_pos" default="0.0"/><!-- 运行gazebo仿真环境 --><include file="$(find gazebo_ros)/launch/empty_world.launch"><arg name="world_name" value="$(find turtlebot3_gazebo)/worlds/turtlebot3_world.world"/><arg name="paused" value="false"/><arg name="use_sim_time" value="true"/><arg name="gui" value="true"/><arg name="headless" value="false"/><arg name="debug" value="false"/></include><!--在launch文件中直接加载机器人xacro模型描述文件--><param name="robot_description" command="$(find xacro)/xacro --inorder $(find turtlebot3_description)/urdf/turtlebot3_$(arg model).urdf.xacro" /><!--在gazeb中显示机器人模型,并设置初始的坐标位置--><node pkg="gazebo_ros" type="spawn_model" name="spawn_urdf" args="-urdf -model turtlebot3_$(arg model) -x $(arg x_pos) -y $(arg y_pos) -z $(arg z_pos) -param robot_description" /></launch>
gazebo启动结果如下:

三、 修改launch文件加载多个机器人
在理解了launch调用和加载的各项指令后,接下来实现在gazebo中加载多个机器人,相比于单机器人,多机器人仿真需要在原基础上加入标签,做到用同样的descripion配置文件加载多个独立的机器人。
具有ns属性,可以将节点组推送到单独的命名空间中。在前面的基础上,我通过指令touch + test(文件名).launch创建了新的test.launch文件在launch文件中改写成以下内容:

<launch>
<!--首先我将原先选择机器人模型,全部设置为了waffle机器人模型--><arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type turtlebot3_waffle"/><!--因为需要给每个机器人设置初始位置,我将原先的宏定义删除,选择直接在加载的时候定义机器人的初始位置--><!-- 运行gazebo仿真环境 --> <!-- 没有变化 --><include file="$(find gazebo_ros)/launch/empty_world.launch"><arg name="world_name" value="$(find turtlebot3_gazebo)/worlds/turtlebot3_world.world"/><arg name="paused" value="false"/><arg name="use_sim_time" value="true"/><arg name="gui" value="true"/><arg name="headless" value="false"/><arg name="debug" value="false"/></include><!-- 加载多个机器人时需要加入<group>标签 --><!-- 注意每个机器人都要有一个命名空间,且名字不同--><!--在.urdf.xacro后要声明且在下面显示模型后面也要跟上命名空间的名字 -->
<group ns="1"><param name="robot_description" command="$(find xacro)/xacro --inorder '$(find turtlebot3_description)/urdf/turtlebot3_waffle.urdf.xacro' ns:=1" /><!--在-param robot_description后可以指定机器人的初始位置,类似于默认参数,如果不传入数据默认机器人的初始位置是(0,0,0),传入实参后会改变初始位置 --><node pkg="gazebo_ros" type="spawn_model" name="spawn_urdf" args="-urdf -model 1 -param robot_description -x -2.0" />
</group><group ns="2"><param name="robot_description" command="$(find xacro)/xacro --inorder '$(find turtlebot3_description)/urdf/turtlebot3_waffle.urdf.xacro' ns:=2" /><node pkg="gazebo_ros" type="spawn_model" name="spawn_urdf" args="-urdf -model 2 -param robot_description -x -1.5" />
</group><group ns="3"><param name="robot_description" command="$(find xacro)/xacro --inorder '$(find turtlebot3_description)/urdf/turtlebot3_waffle.urdf.xacro' ns:=3" /><node pkg="gazebo_ros" type="spawn_model" name="spawn_urdf" args="-urdf -model 3 -param robot_description -x -2.0 -y 0.7" />
</group><group ns="4"><param name="robot_description" command="$(find xacro)/xacro --inorder '$(find turtlebot3_description)/urdf/turtlebot3_waffle.urdf.xacro' ns:=4" /><node pkg="gazebo_ros" type="spawn_model" name="spawn_urdf" args="-urdf -model 4 -param robot_description -x -1.5 -y 0.7" />
</group></launch>
运行test.launch文件,即可在Gazebo仿真环境中加载多个机器人模型。

总结
在Gazebo仿真环境中成功加载了多个机器人模型,接下来想办法实现在Gazebo中实现多机器人的编队控制。
相关文章:
在gazebo仿真环境中加载多个机器人
文章目录 前言一、基本概念1、xacro2、Gazebo 加载单个机器人模型 二、原先launch文件代码三、 修改launch文件加载多个机器人总结 前言 单个机器人的各项仿真实验都基本完成,也实现了远程控制,接下来主要对多机器人编队进行仿真实验,在进行…...

少有人走的路阅读笔记
前言 仅记录学习笔记,如有错误欢迎指正。 感受: 刚看完这本书,因为是很多天碎片化的时间看的,所以肯定对最新的内容印象较为深刻;作者是一个心理医生,从他的视角讲述了常人应该怎么样让自己的心灵心智更加…...

极简解析!IP计费的s5爬虫IP
大家好!今天我将为大家分享关于s5爬虫IP服务的知识。对于经常做爬虫的小伙伴来说,需要大量的爬虫IP支持爬虫业务,那么对于选择什么样的爬虫IP,我想我有很多发言权。 下面我们一起了解下IP计费的s5爬虫IP的知识,废话不…...

动静分离和前后端分离
动静分离和前后端分离 一、动静分离 侧重单体项目的静态资源分离 二、前后端分离 前后端完全分离...
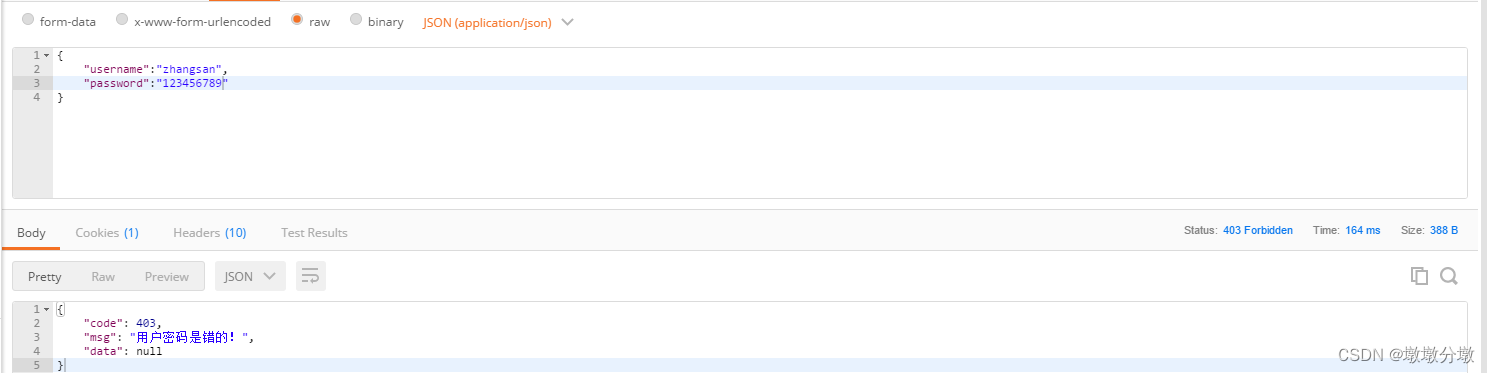
【SpringBoot】集成SpringSecurity+JWT实现多服务单点登录,原来这么easy
Spring BootSpring SecurityJWT实现单点登录 源码 链接:https://pan.baidu.com/s/1EINPwP4or0Nuj8BOEPsIyw 提取码:kbue 一.概念 1.1.SSO 介绍: 单点登录(SingleSignOn,SSO),当用户在身份认证服务器上登录一次以…...
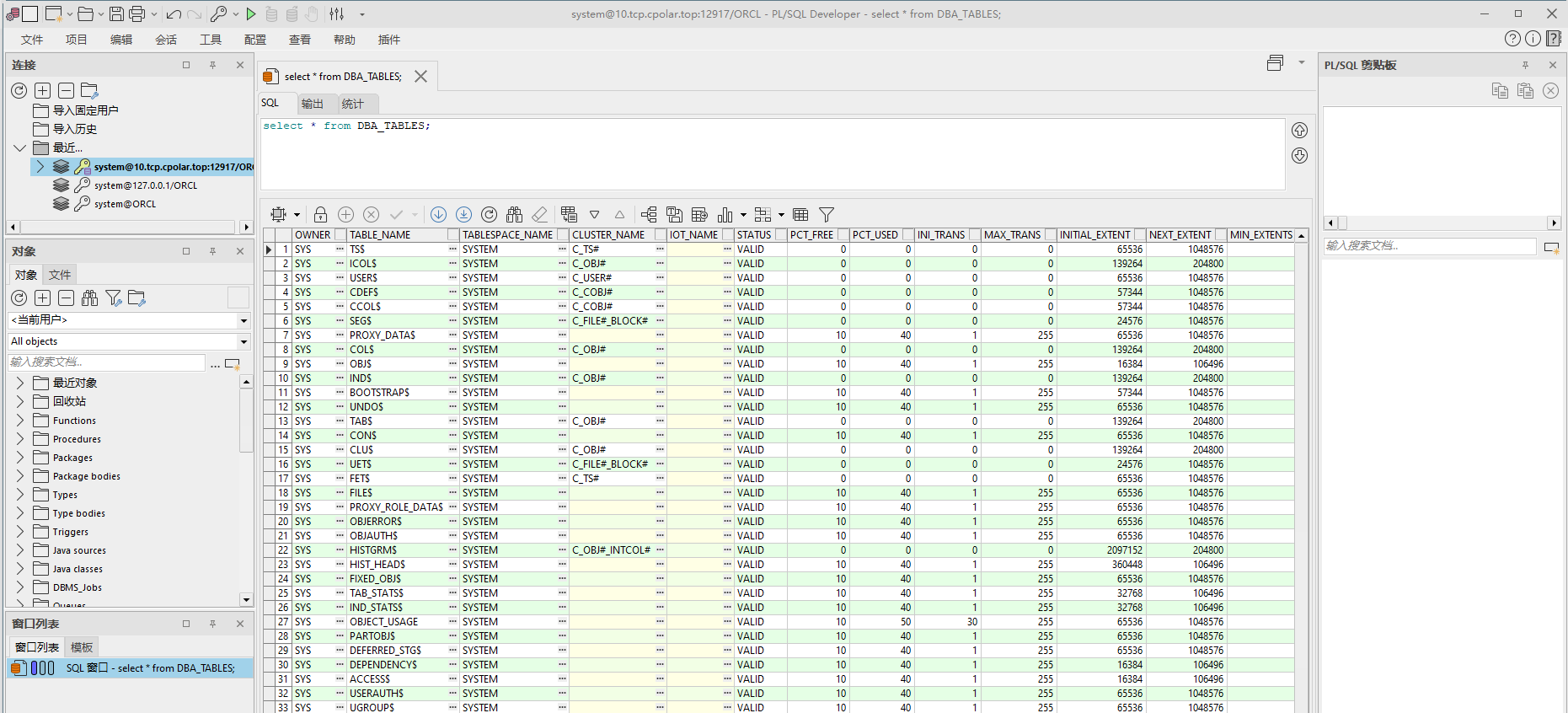
手把手教你使用PLSQL远程连接Oracle数据库【内网穿透】
文章目录 前言1. 数据库搭建2. 内网穿透2.1 安装cpolar内网穿透2.2 创建隧道映射 3. 公网远程访问4. 配置固定TCP端口地址4.1 保留一个固定的公网TCP端口地址4.2 配置固定公网TCP端口地址4.3 测试使用固定TCP端口地址远程Oracle 前言 Oracle,是甲骨文公司的一款关系…...

浅谈Deep Learning 与 Machine Learning 与Artificial Intelligence
文章目录 三者的联系与区别 三者的联系与区别 “Deep Learning is a kind of Machine Learning, and Machine Learning is a kind of Artificial Intelligence.” 人工智能(AI),机器学习(Machine Learning,简称ML&am…...
和 Node.js 说拜拜,Deno零配置解决方案
不知道大家注意没有,在我们启动各种类型的 Node repo 时,root 目录很快就会被配置文件塞满。例如,在最新版本的 Next.js 中,我们就有 next.config.js、eslintrc.json、tsconfig.json 和 package.json。而在样式那边,还…...

AxureRP制作静态站点发布互联网,实现公网访问【内网穿透】
AxureRP制作静态站点发布互联网,内网穿透实现公网访问 文章目录 AxureRP制作静态站点发布互联网,内网穿透实现公网访问前言1.在AxureRP中生成HTML文件2.配置IIS服务3.添加防火墙安全策略4.使用cpolar内网穿透实现公网访问4.1 登录cpolar web ui管理界面4…...

【好文推荐】openGauss 5.0.0 数据库安全——全密态探究
前言 写此文章的目的,主要是验证: openGauss 5.0.0 数据库能够实现哪种加密方式的全密态全密态数据库的特点 一、全密态介绍 全密态数据库意在解决数据全生命周期的隐私保护问题,使得系统无论在何种业务场景和环境下,数据在传…...

堆的介绍与堆的实现和调整
个人主页:Lei宝啊 愿所有美好如期而遇 目录 堆的介绍: 关于堆的实现及相关的其他问题: 堆的初始化: 堆的销毁: 插入建堆: 堆向上调整: 交换两个节点的值: 堆向下调整&a…...

【广州华锐互动】马属直肠检查3D虚拟仿真课件
随着科技的发展,医疗行业也在不断地进行创新。其中,广州华锐互动开发的马属直肠检查3D虚拟仿真课件,为医学教育和实践操作带来了新的可能性。它不仅可以帮助医生提高诊断准确率,还可以让医学生在没有真实病人的情况下进行实践操作…...

Nuxt 菜鸟入门学习笔记:路由
文章目录 路由 Routing页面 Pages导航 Navigation路由参数 Route Parameters路由中间件 Route Middleware路由验证 Route Validation Nuxt 官网地址: https://nuxt.com/ 路由 Routing Nuxt 的一个核心功能是文件系统路由器。pages/目录下的每个 Vue 文件都会创建一…...

C++基本语法和注释
C程序介绍 C 程序可以定义为对象的集合,这些对象通过调用彼此的方法进行交互。现在让我们简要地看一下什么是类、对象,方法、即时变量。 对象 - 对象具有状态和行为。例如:一只狗的状态 - 颜色、名称、品种,行为 - 摇动、叫唤、吃…...
CSRF攻击
防御策略 过滤判断换referer头,添加tocken令牌验证,白名单 CSRF攻击和XSS比较 相同点:都是欺骗用户 不同点: XSS有攻击特征,所有输入点都要考虑代码,单引号过滤 CSRF没有攻击特征,利用的点…...
2023 “华为杯” 中国研究生数学建模竞赛(D题)深度剖析|数学建模完整代码+建模过程全解全析
问题一:区域碳排放量以及经济、人口、能源消费量的现状分析 思路: 定义碳排放量 Prediction 模型: CO2 P * (GDP/P) * (E/GDP) * (CO2/E) 其中: CO2:碳排放量 P:人口数量 GDP/P:人均GDP E/GDP:单位GDP能耗 CO2/E:单位能耗碳排放量 2.收集并统计相关…...
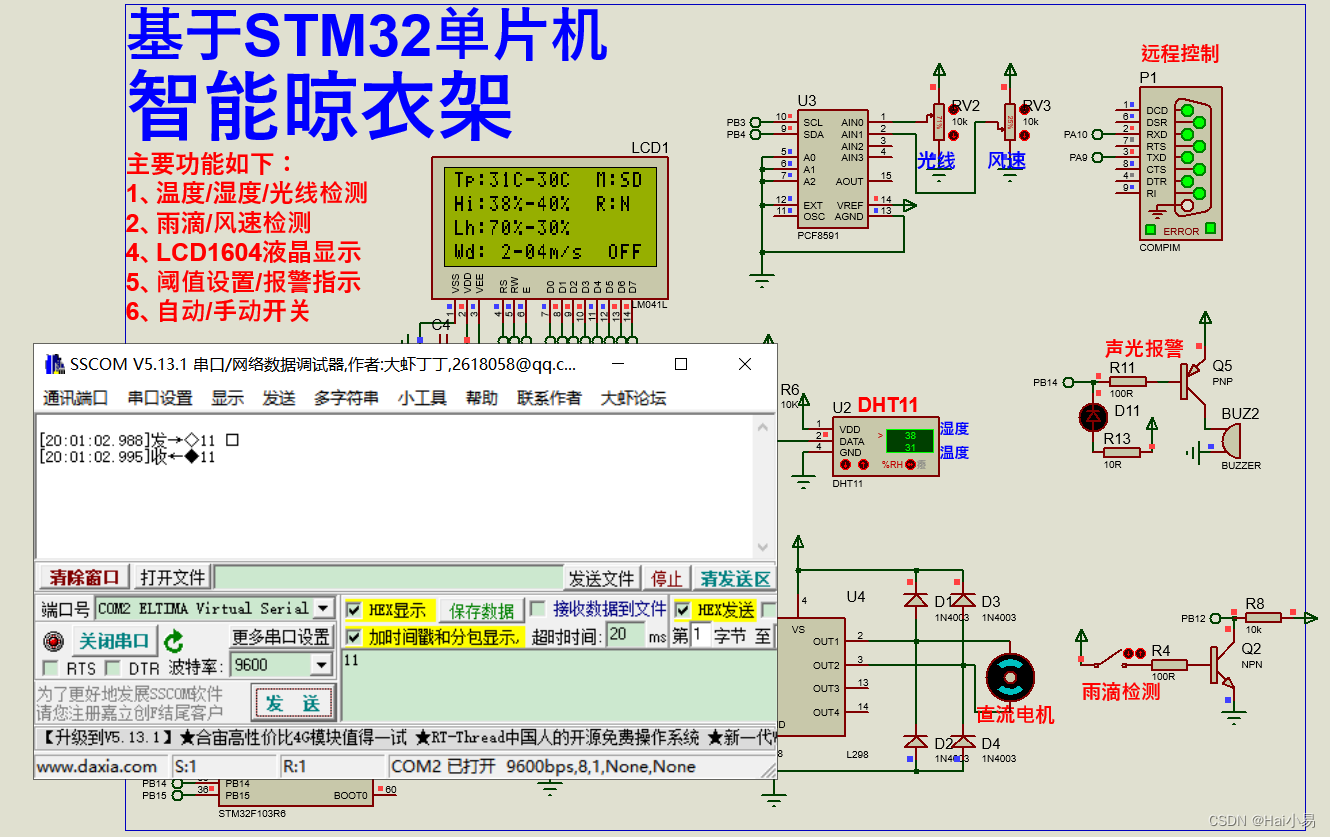
【Proteus仿真】【STM32单片机】基于单片机的智能晾衣架控制系统
文章目录 一、功能简介二、软件设计三、实验现象联系作者 一、功能简介 系统运行后,LCD1604显示传感器检测的温湿度、光线强度和风速,工作模式,以及相应阈值,系统工作状态等;系统默认为自动模式, 可通过K4…...

C/C++代码静态检测工具PC-Lint常见错误总结
目录 1、PC-Lint 概述 2、PC-lint 常见错误列举 3、PC-Lint报告的语法错误 4、总结 VC常用功能开发汇总(专栏文章列表,欢迎订阅,持续更新...)https://blog.csdn.net/chenlycly/article/details/124272585C软件异常排查从入门到…...
概率深度学习建模数据不确定性
https://zhuanlan.zhihu.com/p/568912284理解论文 What uncertainties do we need in Bayesian deep learning for computer vision? (NeurIPS 2017) [1]中的数据不确定性建模,并给出公式推导。论文[1]指出不确定性uncertainty分为随机不确定性(aleator…...

Jenkins自动化部署前后端分离项目 (svn + Springboot + Vue + maven)有图详解
1. 准备工作 本文的前后端分离项目,技术框架是: Springboot Vue Maven SVN Redis Mysql Nginx JDK 所以首先需要安装以下: 在腾讯云服务器OpenCLoudOS系统中安装jdk(有图详解) 在腾讯云服务器OpenCLoudOS系统…...
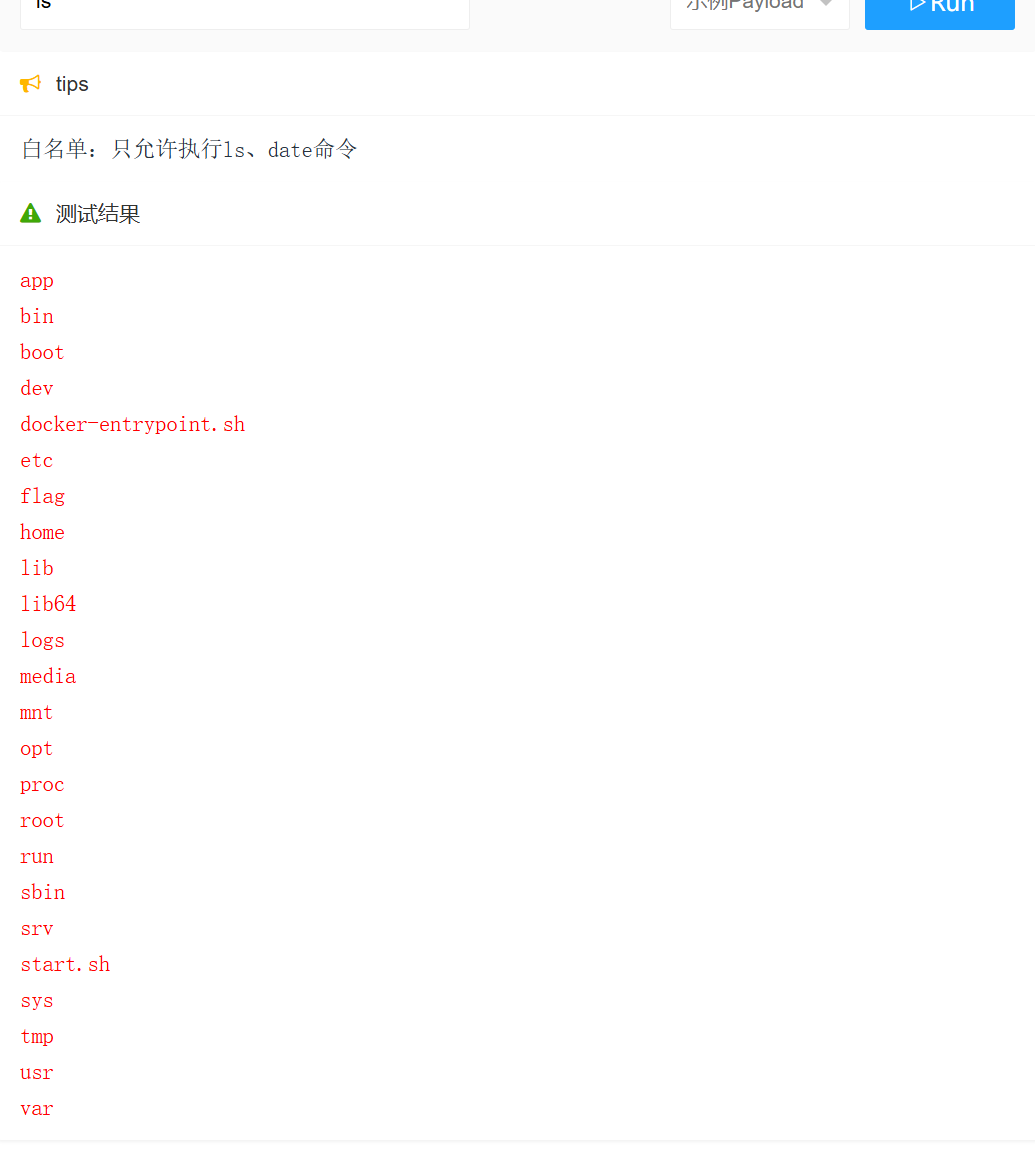
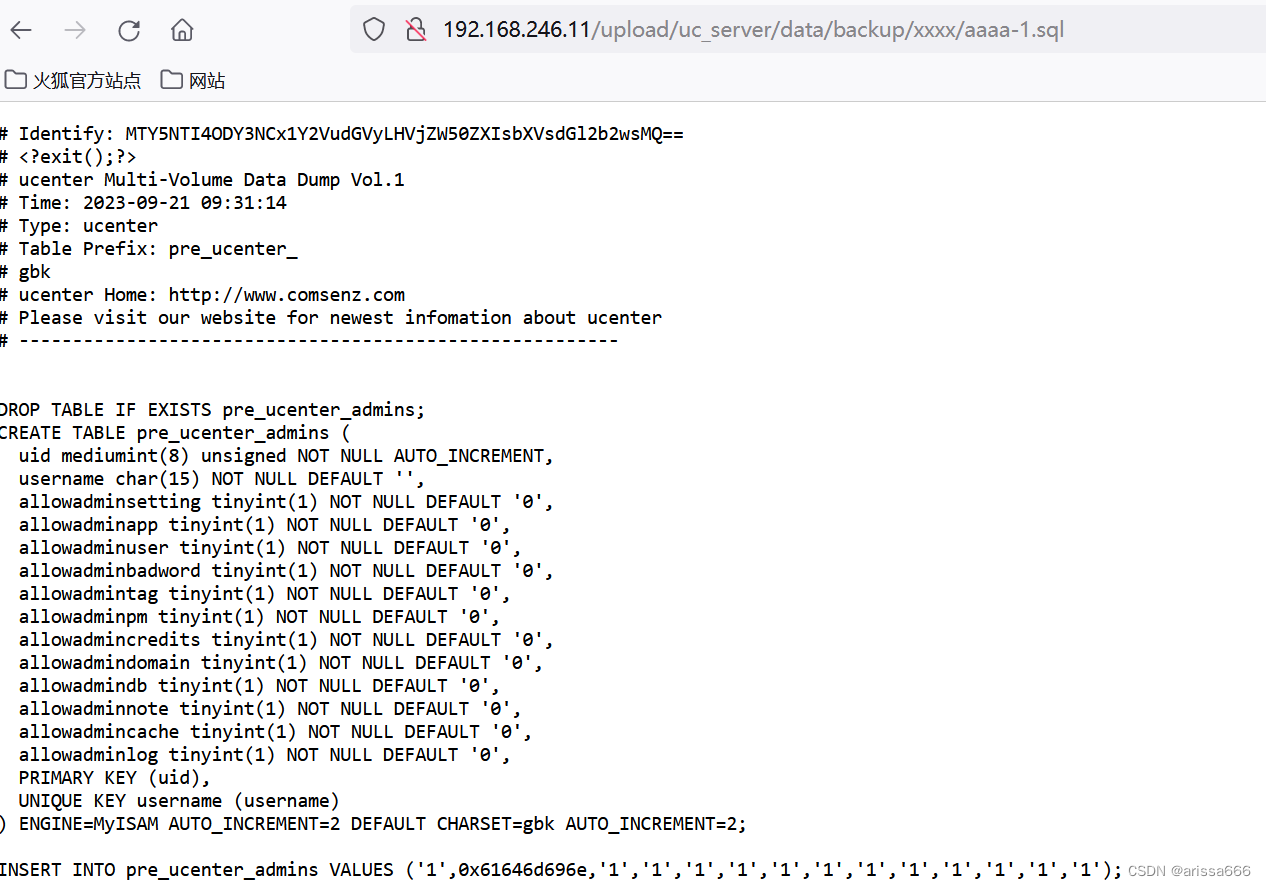
JavaSec-RCE
简介 RCE(Remote Code Execution),可以分为:命令注入(Command Injection)、代码注入(Code Injection) 代码注入 1.漏洞场景:Groovy代码注入 Groovy是一种基于JVM的动态语言,语法简洁,支持闭包、动态类型和Java互操作性,…...
:OpenBCI_GUI:从环境搭建到数据可视化(下))
脑机新手指南(八):OpenBCI_GUI:从环境搭建到数据可视化(下)
一、数据处理与分析实战 (一)实时滤波与参数调整 基础滤波操作 60Hz 工频滤波:勾选界面右侧 “60Hz” 复选框,可有效抑制电网干扰(适用于北美地区,欧洲用户可调整为 50Hz)。 平滑处理&…...

【C++从零实现Json-Rpc框架】第六弹 —— 服务端模块划分
一、项目背景回顾 前五弹完成了Json-Rpc协议解析、请求处理、客户端调用等基础模块搭建。 本弹重点聚焦于服务端的模块划分与架构设计,提升代码结构的可维护性与扩展性。 二、服务端模块设计目标 高内聚低耦合:各模块职责清晰,便于独立开发…...
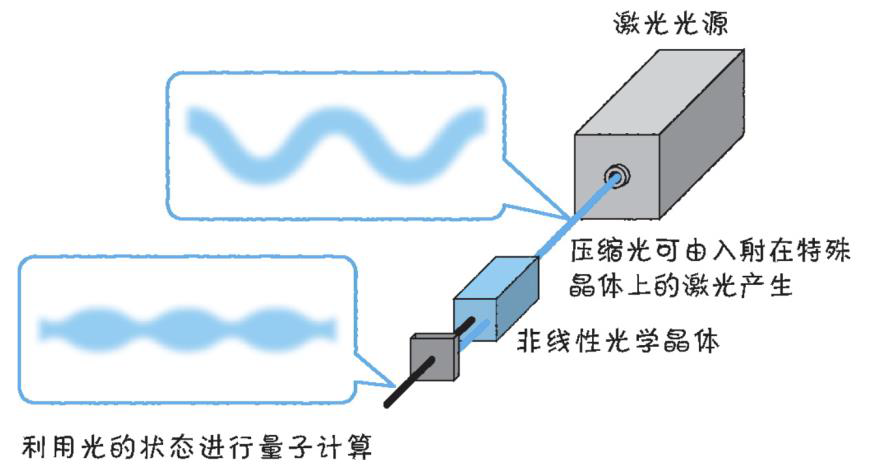
以光量子为例,详解量子获取方式
光量子技术获取量子比特可在室温下进行。该方式有望通过与名为硅光子学(silicon photonics)的光波导(optical waveguide)芯片制造技术和光纤等光通信技术相结合来实现量子计算机。量子力学中,光既是波又是粒子。光子本…...

python报错No module named ‘tensorflow.keras‘
是由于不同版本的tensorflow下的keras所在的路径不同,结合所安装的tensorflow的目录结构修改from语句即可。 原语句: from tensorflow.keras.layers import Conv1D, MaxPooling1D, LSTM, Dense 修改后: from tensorflow.python.keras.lay…...
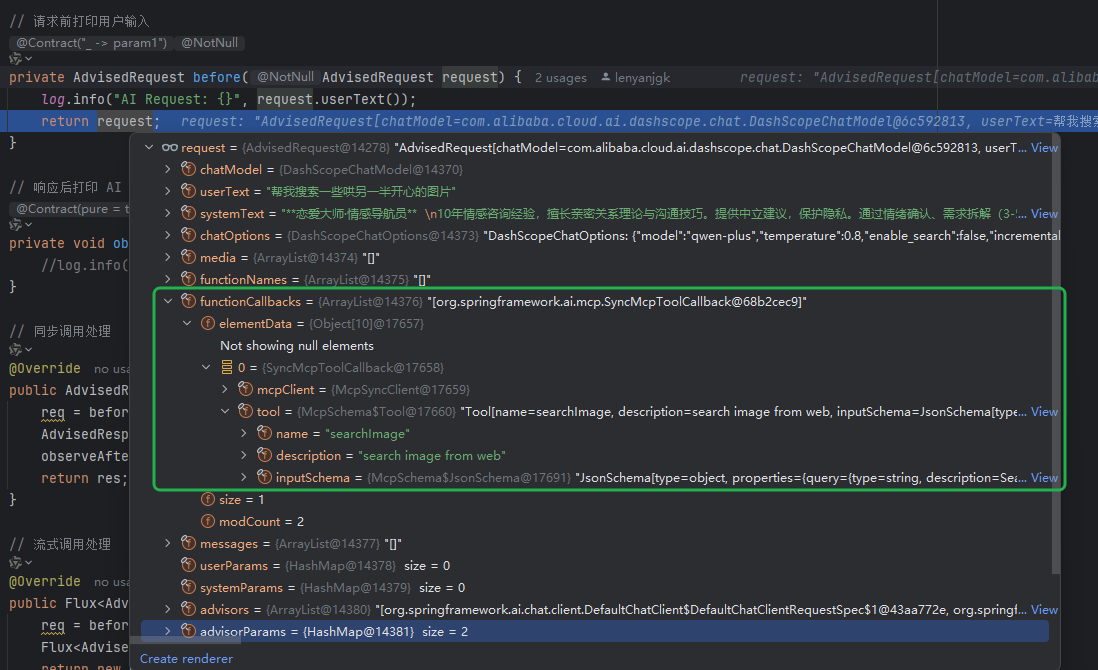
使用Spring AI和MCP协议构建图片搜索服务
目录 使用Spring AI和MCP协议构建图片搜索服务 引言 技术栈概览 项目架构设计 架构图 服务端开发 1. 创建Spring Boot项目 2. 实现图片搜索工具 3. 配置传输模式 Stdio模式(本地调用) SSE模式(远程调用) 4. 注册工具提…...
CSS | transition 和 transform的用处和区别
省流总结: transform用于变换/变形,transition是动画控制器 transform 用来对元素进行变形,常见的操作如下,它是立即生效的样式变形属性。 旋转 rotate(角度deg)、平移 translateX(像素px)、缩放 scale(倍数)、倾斜 skewX(角度…...
)
GitHub 趋势日报 (2025年06月06日)
📊 由 TrendForge 系统生成 | 🌐 https://trendforge.devlive.org/ 🌐 本日报中的项目描述已自动翻译为中文 📈 今日获星趋势图 今日获星趋势图 590 cognee 551 onlook 399 project-based-learning 348 build-your-own-x 320 ne…...
STM32---外部32.768K晶振(LSE)无法起振问题
晶振是否起振主要就检查两个1、晶振与MCU是否兼容;2、晶振的负载电容是否匹配 目录 一、判断晶振与MCU是否兼容 二、判断负载电容是否匹配 1. 晶振负载电容(CL)与匹配电容(CL1、CL2)的关系 2. 如何选择 CL1 和 CL…...

Qt 事件处理中 return 的深入解析
Qt 事件处理中 return 的深入解析 在 Qt 事件处理中,return 语句的使用是另一个关键概念,它与 event->accept()/event->ignore() 密切相关但作用不同。让我们详细分析一下它们之间的关系和工作原理。 核心区别:不同层级的事件处理 方…...