【最终版】tkinter+matplotlib实现一个强大的绘图系统
文章目录
- 辅助坐标轴功能实现
- 代码优化
- 源代码
Python绘图系统:
- 前置源码: Python打造动态绘图系统
- 📈一 三维绘图系统 📈二 多图绘制系统📈三 坐 标 轴 定 制
- 📈四 定制绘图风格 📈五 数据生成导入📈六 三维动态演示
- 坐标列表进阶:导出数据📌系统菜单📌批量文件导入📌辅助坐标轴
- 绘图类型进阶:坐标映射📌八种绘图函数📌坐标和绘图函数设置📌所有绘图函数📌强大的绘图系统
这是本系列博客的第28篇,从功能来说,这个小巧的绘图系统应该算是比较完备了。
辅助坐标轴功能实现
之前在AxisList中实现了辅助坐标轴的添加和删除功能,但只是实现了交互逻辑,没有实现真正的辅助功能。
这个功能也很容易实现,只需仿造getXYZ,设计一个getABC
def getABC(self):return [key in self.ABC if key in self.afs]
然后更改readPython函数,因为可能会输入的变量太多,再用这种readPython(self, t=None, x=None, y=None, z=None)的写法显然就不合适了。所以将其改为
def readPython(self, dct):locals().update(dct)self.data = eval(self.srcText.get())return self.data
与此同时,一切参与过dct参数传递的函数,其**txty的两个星号都要去掉,写成类似下面的形式
def setData(self, data=None, dct={}):if self.mode.get() == "序列":return self.getArray()elif self.mode.get() == "导入":return self.loadData(data)else:return self.readPython(dct)
最后更改DrawSystem中的readDatas函数
def readDatas(self, al):dct = {}data = {}if al.hasTimeAxis():data['t'] = al.setData('t')dct['t'] = data['t'][self.tIndex]for flag in al.getABC():data[flag] = al.setData(flag, dct=dct)dct[flag] = data[flag]for flag in al.getXYZ():data[flag] = al.setData(flag, dct=dct)dct[flag] = data[flag]return data
最后效果如下

代码优化
至此,本阶段希望实现的功能就实现得七七八八了,接下来要对代码做一些优化,包括以下几个方面
代码清理
由于DrawType继承了更加全面的设置功能,所以原本需要调用的函数现在并不需要调用了,从而产生了大量不需要的函数,这个就自行检测,把没有调用的函数都删掉就对了。
另外,全局的导入数据功能,目前处于养老状态,其具体代码估计以后也不能用了,所以接口保留,但代码删除。
接口优化
首先AxisList有一个types参数,这个参数原本是要传入绘图类型的,现在绘图类型都在DrawType中,所以这个参数可以取消。
DrawType的传入参数里有一个回调函数,默认是None,这会导致报错,所以将其默认值改为lambda x:x。
常量、变量和函数名称
AxisFrame中的坐标轴设置模式,目前有四种,即"序列化", “源代码”, “外部导入”, “无数据”,感觉这种命名不太规整,故修改为
“序列”, “源码”, “导入”, “无数据”
这四个参数用的次数太多,所以改动的时候需要细致,按理说这些应该写成变量,这样的话也方便国际化,考虑到本身我也没想把这个项目写太长,所以就算了。
而文字长度发生变化,使得combobox的宽度就显得太长了,所以再调整一下布局。
源代码
目前四个文件的总代码行数大概800行左右,我的目标是用1000行代码实现一个功能完备且强大的绘图系统。接下来希望实现不同坐标轴的关联,以实现插值、拟合等进阶功能,并接入几个用于示例的全局优化代码,进一步提高程序的实用性。
相关文章:
【最终版】tkinter+matplotlib实现一个强大的绘图系统
文章目录 辅助坐标轴功能实现代码优化源代码 Python绘图系统: 前置源码: Python打造动态绘图系统📈一 三维绘图系统 📈二 多图绘制系统📈三 坐 标 轴 定 制📈四 定制绘图风格 📈五 数据生成导入…...
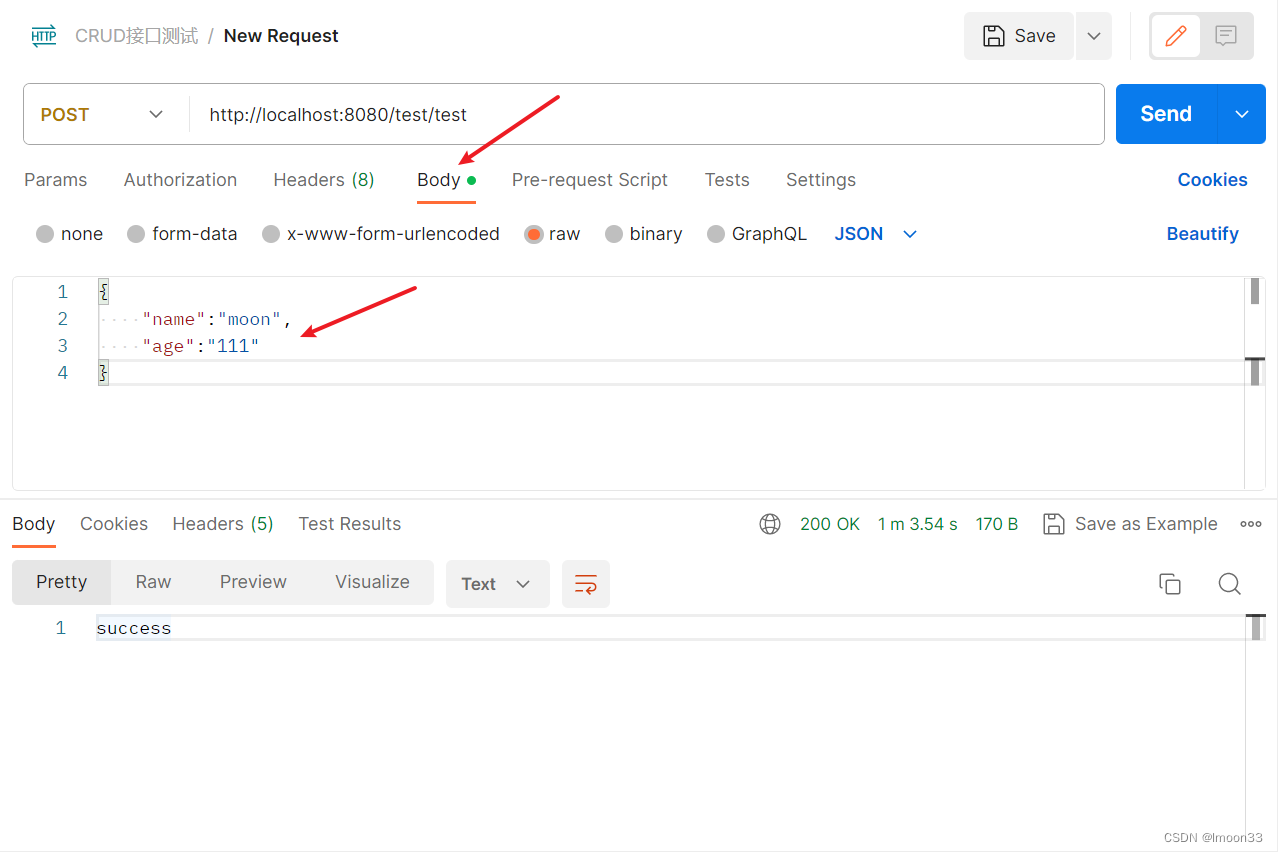
Postman使用实例
Postman使用实例 实体类Emp package com.example.springboot_postman.pojo;import com.fasterxml.jackson.annotation.JsonIgnoreProperties; import lombok.AllArgsConstructor; import lombok.Data; import lombok.NoArgsConstructor;import javax.persistence.*; import j…...

【ES的优势和原理及分布式开发的好处与坏处】
文章目录 ES的优势及分布式开发的好处1.ES的优势1.1 优势概述1.2 相关问题1)为什么需要 Elasticsearch?MySQL 不行吗?2)SQL检索的问题:3)ES检索快的原理 2.分布式开发的好处与坏处 ES的优势及分布式开发的好…...

Autosar诊断实战系列23-CanTp半/全双工及相关工程问题思考
本文框架 前言1. CanTp半/全双工基本介绍1.1 差异比较1.2 不同模式下可能发生场景分析1.2.1 当CanTp正在发送1.2.2 当CanTp正在接收2. 相关工程问题思考前言 在本系列笔者将结合工作中对诊断实战部分的应用经验进一步介绍常用UDS服务的进一步探讨及开发中注意事项, Dem/Dcm/C…...
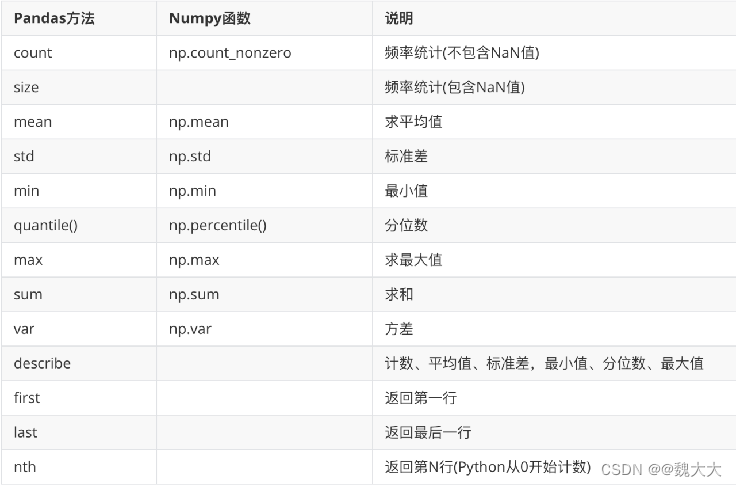
【Pandas】数据分组groupby
本文目标: 应用groupby 进行分组对分组数据进行聚合,转换和过滤应用自定义函数处理分组之后的数据 文章目录 1. 数据聚合1.1 单变量分组聚合1.2 Pandas内置聚合方法1.3 聚合方法使用Numpy的聚合方法自定义方法同时计算多种特征向agg/aggregate传入字典 2. 数据转换…...
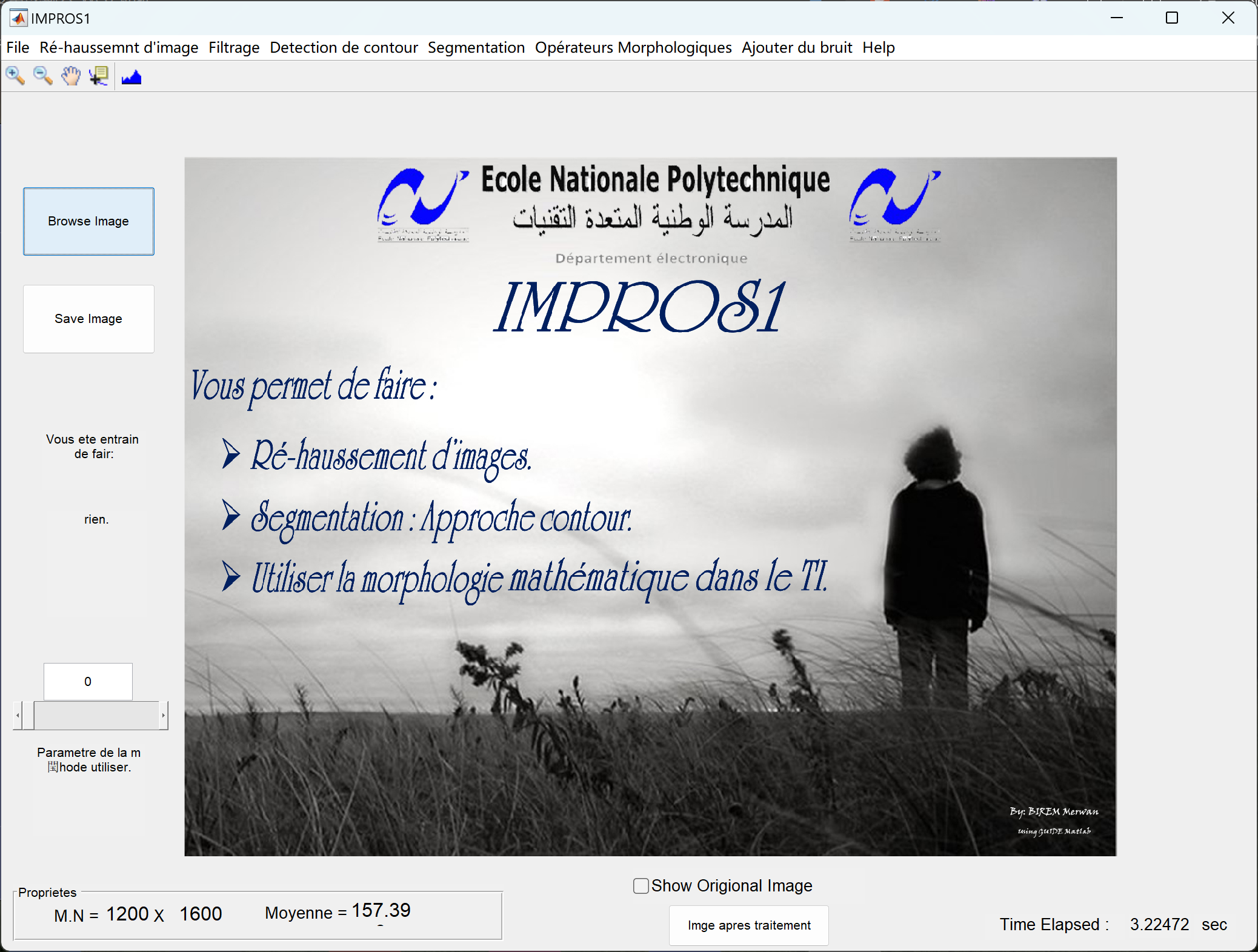
【图像处理GIU】图像分割(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
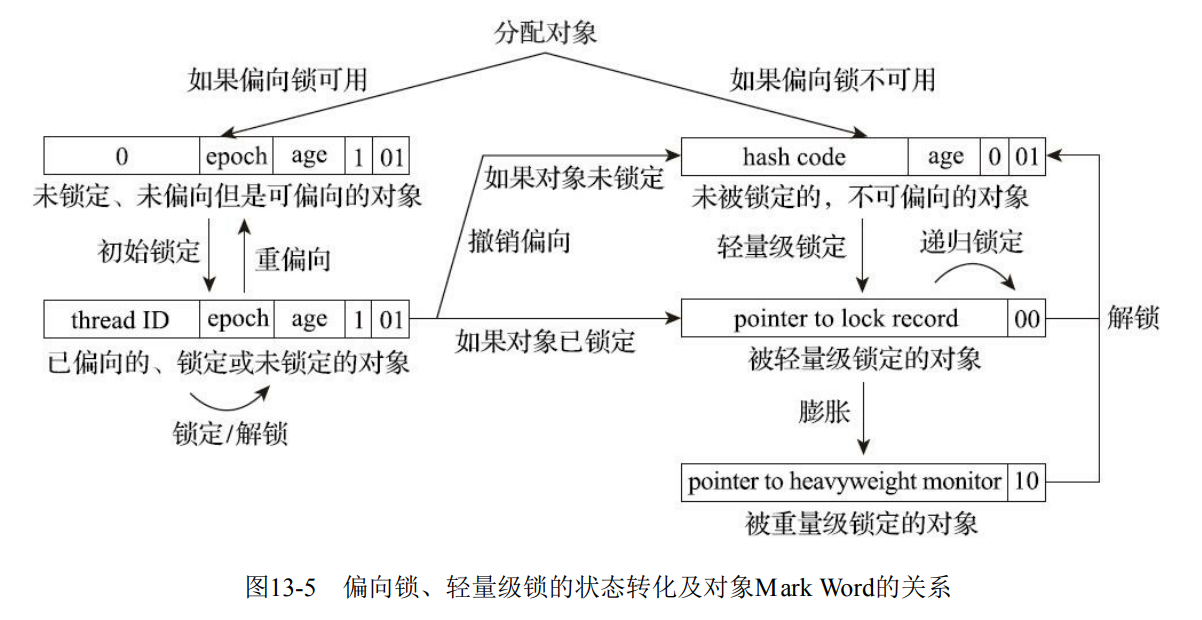
Java中的锁与锁优化技术
文章目录 自旋锁与自适应自旋锁消除锁粗化轻量级锁偏向锁重量级锁 自旋锁与自适应自旋 自旋锁是一种锁的实现机制,其核心思想是当一个线程尝试获取锁时,如果锁已经被其他线程持有,那么这个线程会在一个循环中不断地检查锁是否被释放…...
布局与打包
属性栏直接输入值,比代码更直观方便。 打包:...

UVa11324 - The Largest Clique
Online Judge 题目大意:有一张n个点m条边的图,现对于每一个点u,建立一条边连接它和所有它能到达的点,问满足所有点之间都有边的分量的大小最大是多少 0<n<1000;0<m<50000 思路:根据建新图的规则可知&am…...

【Linux】TCP的服务端(守护进程) + 客户端
文章目录 📖 前言1. 服务端基本结构1.1 类成员变量:1.2 头文件1.3 初始化:1.3 - 1 全双工与半双工1.3 - 2 inet_aton1.3 - 3 listen 2. 服务端运行接口2.1 accept:2.2 服务接口: 3. 客户端3.1 connect:3.2 …...

1.7. 找出数组的第 K 大和原理及C++实现
题目 给你一个整数数组 nums 和一个 正 整数 k 。你可以选择数组的任一 子序列 并且对其全部元素求和。 数组的 第 k 大和 定义为:可以获得的第 k 个 最大 子序列和(子序列和允许出现重复) 返回数组的 第 k 大和 。 子序列是一个可以由其他数…...
基于微信小程序的付费自习室
博主介绍:✌程序员徐师兄、7年大厂程序员经历。全网粉丝30W、csdn博客专家、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 文章目录 1 简介2 技术栈3 需求分析3.1用户需求分析3.1.1 学生用户3.1.3 管理员用户 4 数据库设计4.4.1 E…...
纪念在CSDN的2048天
时间真快~...

云原生Kubernetes:简化K8S应用部署工具Helm
目录 一、理论 1.HELM 2.部署HELM2 3.部署HELM3 二、实验 1.部署 HELM2 2.部署HELM3 三、问题 1.api版本过期 2.helm初始化报错 3.pod状态为ImagePullBackOff 4.helm 命令显示 no repositories to show 的错误 5.Helm安装报错 6.git命令报错 7.CentOS 7 下git c…...

qml保姆级教程五:视图组件
💂 个人主页:pp不会算法v 🤟 版权: 本文由【pp不会算法v】原创、在CSDN首发、需要转载请联系博主 💬 如果文章对你有帮助、欢迎关注、点赞、收藏(一键三连)和订阅专栏哦 QML系列教程 QML教程一:布局组件 文章目录 列表视图ListVi…...

2310d编译不过
struct A {this(int[] data) safe { a data; }int[] a; }void main() safe {int[3] test [1, 2, 3];A a A(test); }应该给data参数加上return scope.或让构造器为模板参数来推导,否则,构造器可以把栈分配切片赋值给全局变量....

CleanMyMac X4.14.1最新版本下载
CleanMyMac X是一个功能强大的Mac清理软件,它的设计理念是提供多个模块,包括垃圾清理、安全保护、速度优化、应用程序管理和文档管理粉碎等,以满足用户的不同需求。软件的界面简洁直观,让用户能够轻松进行日常的清理操作。 使用C…...
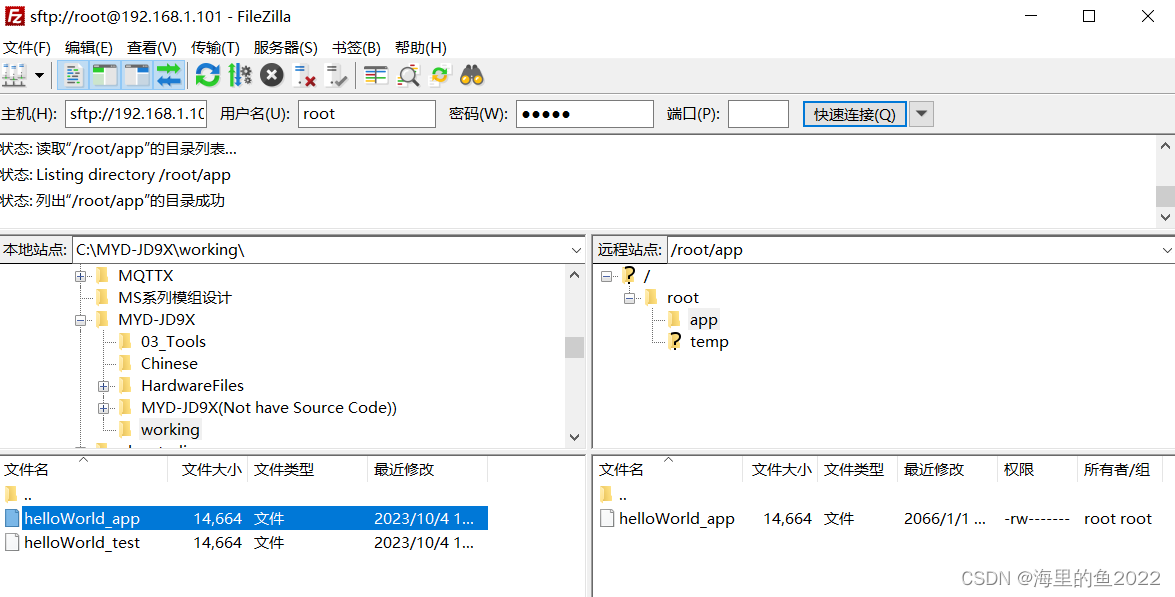
芯驰D9评测(3)--建立开发环境
1. 建立交叉编译链接环境 官网下载的SDK包中就有交叉工具链,米尔提供的这个 SDK 中除了包含各种源代码外还提供了必要的交叉工具链,可以直接用于编译应用程序等。 用户可以直接使用次交叉编译工具链来建立一个独立的开发环境,可单独编译…...

阿里云服务器IP地址查询方法(公网IP和私网IP)
阿里云服务器IP地址在哪查看?在云服务器ECS管理控制台即可查看,阿里云服务器IP地址包括公网IP和私有IP地址,阿里云百科分享阿里云服务器IP地址查询方法: 目录 阿里云服务器IP地址查询 阿里云服务器IP地址查询 1、登录到阿里云服…...

第47节——使用bindActionCreators封装actions模块
一、什么是action creators 1、概念 在Redux中,Action Creators是一种函数,它用于创建一个描述应用程序状态变化的action对象。Action对象是一个普通JavaScript对象,它包含一个描述action类型的字符串属性(通常称为“type”&…...

如何利用Electron-React-Boilerplate自动化脚本提升开发效率:完整指南
如何利用Electron-React-Boilerplate自动化脚本提升开发效率:完整指南 【免费下载链接】electron-react-boilerplate A Foundation for Scalable Cross-Platform Apps 项目地址: https://gitcode.com/gh_mirrors/el/electron-react-boilerplate Electron-Rea…...

Kotlin 2.2测试覆盖率终极指南:从配置到质量门禁完整教程
Kotlin 2.2测试覆盖率终极指南:从配置到质量门禁完整教程 【免费下载链接】kotlin The Kotlin Programming Language. 项目地址: https://gitcode.com/GitHub_Trending/ko/kotlin Kotlin 2.2作为一门现代编程语言,不仅在语法简洁性和互操作性方面…...

别再用默认密码了!手把手教你配置openGauss数据库的账户锁定与密码复杂度策略
企业级openGauss数据库安全加固实战:从密码策略到账户锁定的全方位防护 在数字化转型浪潮中,数据库作为企业核心资产的存储载体,其安全性直接关系到业务连续性和数据隐私。openGauss作为新一代企业级开源数据库,其内置的安全机制若…...

5分钟拯救100GB硬盘空间:智能游戏缓存清理全攻略
5分钟拯救100GB硬盘空间:智能游戏缓存清理全攻略 【免费下载链接】SteamCleaner :us: A PC utility for restoring disk space from various game clients like Origin, Steam, Uplay, Battle.net, GoG and Nexon :us: 项目地址: https://gitcode.com/gh_mirrors/…...

Docker低代码容器化陷阱曝光:87%团队踩坑的YAML自动生成漏洞及军工级修复方案
更多请点击: https://intelliparadigm.com 第一章:Docker低代码容器化陷阱曝光与军工级修复全景图 在企业级容器化实践中,“低代码 Docker 化”常被误认为可规避底层复杂性,实则暗藏三大致命陷阱:镜像层污染导致不可复…...

智能视频PPT提取工具:3步将视频课件转换为可编辑文档
智能视频PPT提取工具:3步将视频课件转换为可编辑文档 【免费下载链接】extract-video-ppt extract the ppt in the video 项目地址: https://gitcode.com/gh_mirrors/ex/extract-video-ppt 还在为在线课程、会议录像中的PPT内容整理而烦恼吗?extr…...

Obsidian BMO Chatbot:在笔记软件中集成AI助手的配置与实战指南
1. 项目概述:在笔记软件里塞进一个AI大脑如果你和我一样,是个重度Obsidian用户,同时又对各种大语言模型(LLM)爱不释手,那你肯定也经历过这种“精神分裂”般的体验:一边在Obsidian里奋笔疾书记录…...
)
告别Diskpart恐惧症:手把手教你用命令行安全合并U盘分区(附完整命令清单)
命令行艺术:彻底掌握Diskpart合并U盘分区的底层逻辑 你是否遇到过这样的场景——插入U盘后系统提示需要格式化,打开磁盘管理工具却发现原本单一的存储空间被分割成多个陌生分区?这种"分区幽灵"现象往往让普通用户手足无措ÿ…...
+锁相环(PLL)的中、高速区域永磁同步电机无感控制研究(Simulink仿真实现))
基于反电势观测器(Back-EMF)+锁相环(PLL)的中、高速区域永磁同步电机无感控制研究(Simulink仿真实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

如何让经典Direct3D 8游戏在现代Windows系统流畅运行:d3d8to9完整配置指南
如何让经典Direct3D 8游戏在现代Windows系统流畅运行:d3d8to9完整配置指南 【免费下载链接】d3d8to9 A D3D8 pseudo-driver which converts API calls and bytecode shaders to equivalent D3D9 ones. 项目地址: https://gitcode.com/gh_mirrors/d3/d3d8to9 …...