ROS键盘遥控机器人,通过参数服务器指定速度
1、引言
在上节的驱动机器人,我们知道是cmd_vel话题发布一串Twist类型消息来控制,我们可以输入如下命令查看这个Twist的详细信息:rosmsg show geometry_msgs/Twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
由两个向量组成,线速度linear和角速度angular。
然后在命令行,我们对话题cmd_vel发布消息,输入命令如下
rostopic pub /cmd_vel geometry_msgs/Twist -- '[1.0, 0.0, 0.0]' '[0.0, 0.0, 0.0]'
这样就可以驱动机器人行驶了,也就说控制差分驱动的平面运动机器人,我们只需要使用上述两个参数:linear就是前进与后退的速度(米/秒),angular就是绕竖直轴的角速度(弧度/秒),这个角速度被称为偏航角速度或简单地理解为机器人旋转得有多快。
这节讲解如何遥控机器人,我们通过键盘来控制,所以需要写一个监听键盘敲击的节点,以及在keys话题上发布std_msgs/String的键盘驱动程序。
2、捕获键盘敲击
使用Python的termios和tty库,将终端设置成为原始模式,并捕获键盘的敲击事件,然后将这些事件以std_msgs/String的形式发布出去。
我们接着在上节的工作空间里面来写:cd ~/mywanderbot_ws/src/mywanderbot/src
2.1、key_publisher.py
我们来写一个keys话题,通过这个话题来捕获键盘敲击,然后通过std_msgs.msg.String消息类型来发布:gedit key_publisher.py
#!/usr/bin/env python
import rospy
import sys,select,tty,termios
from std_msgs.msg import Stringif __name__=='__main__':key_pub = rospy.Publisher('keys',String,queue_size=1)rospy.init_node('keyboard_driver')rate = rospy.Rate(100)old_attr = termios.tcgetattr(sys.stdin)#print(old_attr)tty.setcbreak(sys.stdin.fileno())#print(termios.tcgetattr(sys.stdin))while not rospy.is_shutdown():if select.select([sys.stdin],[],[],0)[0] == [sys.stdin]:key_pub.publish(sys.stdin.read(1))rate.sleep()termios.tcsetattr(sys.stdin,termios.TCSADRAIN,old_attr)加一个可执行权限:chmod u+x key_publisher.py
2.2、获取与设置终端
这个程序使用termios库来捕获键盘敲击,默认地,终端会缓冲文本的一行,直到用户按下回车,才将这一行的文本发送到程序中。那本节,我们是按下任意一个键,我们就要在标准的输入流中获取它,所以需要改变终端的行为。先获取做个备份,然后通过setcbreak更改其为cbreak mode(中断模式),tcgetattr(fd) -> list_of_attrs,获取文件描述符fd的tty属性
模式更改好了之后,我们就可以持续地等待标准输入流,直到有字符出现,虽然我们可以简单地将程序阻塞在标准输入上,但是那样做将导致进程无法触发任何ROS的回调函数,所以这里我们使用select函数,将超时参数设置为0,这样每次调用select函数就不会阻塞,而是立即返回。每次循环中,我们将使用rate.sleep函数消耗掉剩下的时间。
最后在程序退出之前,将终端又设置成标准模式。
termios.tcsetattr(sys.stdin,termios.TCSADRAIN,old_attr)#tcsetattr解释如下:
tcsetattr(fd, when, attributes) -> None为文件描述符fd设置tty属性
when:确定何时更改属性
termios.TCSANOW:立即改变
termios.TCSADRAIN:在传送完毕后更改
termios.TCSAFLUSH:传输完毕后改变,队列输出并丢弃所有队列输入
2.3、select
其中select的用法如下
select(rlist, wlist, xlist[, timeout]) -> (rlist, wlist, xlist)等待,直到一个或多个文件描述符准备好进行某种I/O操作
rlist -- 等待,直到准备好读
wlist -- 等待,直到准备好写
xlist -- 等待,直到有异常
如果只需要一种条件,则为其他列表设置"[]"即可。第四个是可选的超时参数,如果不设置就永不超时。
需要注意的是,在Windows上,只支持套接字,而在Unix上,既支持套接字也支持使用文件描述符。
2.4、捕获测试
我们开三个终端,分别输出如下命令:
roscorecd ~/mywanderbot_ws/src/mywanderbot/src
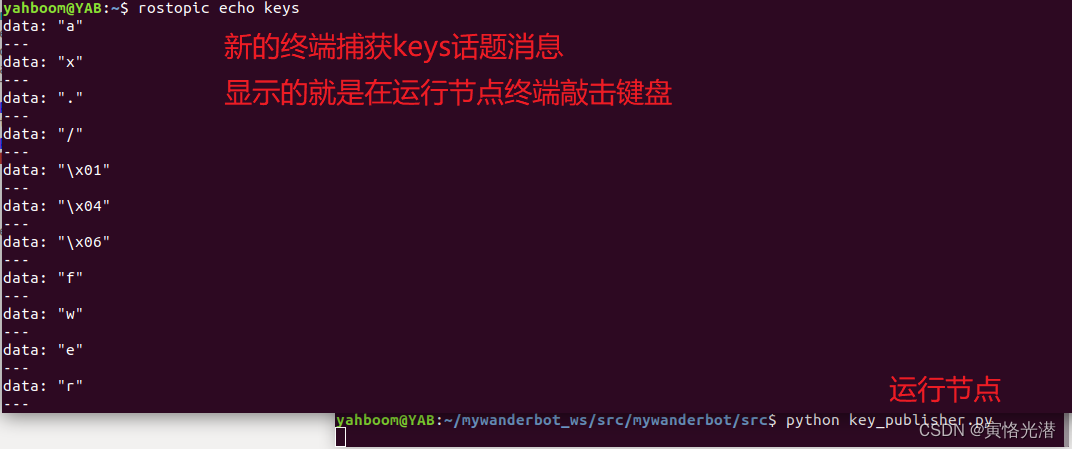
python key_publisher.pyrostopic echo keys测试的时候,切换到第二个终端敲击键盘,我们就会在第三个终端打印keys话题信息,进行显示出来。如下图:
3、键盘遥控
我们通过键盘来遥控机器人,看下是如何处理的,通过捕获键盘字母,然后如果是指定的字母,我们就通过Twist消息来输出对应速度。
3.1、keys_to_twist.py
cd ~/mywanderbot_ws/src/mywanderbot/src
gedit keys_to_twist.py
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
from geometry_msgs.msg import Twistkey_mapping={'w':[1,0],'x':[-1,0],'a':[0,1],'d':[0,-1],'s':[0,0]}def keys_cb(msg,twist_pub):if len(msg.data)==0 or not key_mapping.has_key(msg.data[0]):returnvels=key_mapping[msg.data[0]]t=Twist()t.linear.x=vels[0]t.angular.z=vels[1]twist_pub.publish(t)if __name__=='__main__':rospy.init_node('keys_to_twist')twist_pub=rospy.Publisher('cmd_vel',Twist,queue_size=1)#print(twist_pub.get_num_connections)rospy.Subscriber('keys',String,keys_cb,twist_pub)rospy.spin()这里可以看到,使用key_mapping字典来获取速度,通过订阅keys话题,然后使用它的回调函数keys_cb在字典中查找获取的键名,找到了键名就取出对应的速度,最后通过cmd_vel将键盘获取的速度值发布出去即可。
加上可执行的权限:chmod u+x keys_to_twist.py
分别开启终端来测试下:
roscorecd ~/mywanderbot_ws/src/mywanderbot/src
python key_publisher.pycd ~/mywanderbot_ws/src/mywanderbot/src
python keys_to_twist.py我们可以查看cmd_vel的显示情况,在python key_publisher.py这个终端我们敲击键盘,就可以看到速度向量的情况:rostopic echo cmd_vel
linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 1.0
---
当然也可以启动gazebo仿真机器人:roslaunch turtlebot3_gazebo turtlebot3_world.launch
然后我们键盘来控制这个机器人,可以看到机器人在正常运行。
3.2、keys_to_twist_rate.py
我们来看下这个发布消息的平均速率:rostopic hz cmd_vel
subscribed to [/cmd_vel]
no new messages
no new messages
...
average rate: 0.198
min: 0.214s max: 51.695s std dev: 12.05897s window: 24
average rate: 0.204
min: 0.214s max: 51.695s std dev: 11.82527s window: 25
...
我们发现每秒估计一次的平均速率的估计值基本上一直是接近0,也就是仅在我们敲击键盘时,才突然增长一下,然后又变成了0,所以为了让这个节点适用于那些需要稳定的速度命令流的机器人,我们每隔0.1秒(频率为10Hz)就输出一条Twist消息,为了做到这一点,我们在没有收到新的命令时,就重复上一次的命令。
这里我们可以在while循环里面使用sleep(0.1)来实现输出频率的控制,但这样仅仅只是保证输出频率不大于10Hz,而实际的运行频率很可能会由于操作系统的调度和循环本身的耗时出现较大的波动。
因为不同的计算机是有着不同的运行频率和计算性能,为了保证固定不变的输出频率,程序在循环中所需的实际CPU休眠时间也是不能预知的,所以我们使用ROS中的rate结构来实现,它会去持续地估计循环的耗时,获得更一致的结果。
我们将其改进如下: cd ~/mywanderbot_ws/src/mywanderbot/src
gedit keys_to_twist_rate.py
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
from geometry_msgs.msg import Twistkey_mapping={'w':[1,0],'x':[-1,0],'a':[0,1],'d':[0,-1],'s':[0,0]}
g_last_twist=Nonedef keys_cb(msg,twist_pub):global g_last_twistif len(msg.data)==0 or not key_mapping.has_key(msg.data[0]):return vels=key_mapping[msg.data[0]]g_last_twist.linear.x=vels[0]g_last_twist.angular.z=vels[1]twist_pub.publish(g_last_twist)if __name__=='__main__':rospy.init_node('keys_to_twist_rate')twist_pub=rospy.Publisher('cmd_vel',Twist,queue_size=1)rospy.Subscriber('keys',String,keys_cb,twist_pub)rate=rospy.Rate(10)g_last_twist=Twist()while not rospy.is_shutdown():twist_pub.publish(g_last_twist)rate.sleep()加个可执行权限:chmod u+x keys_to_twist_rate.py
分别开启终端并执行下面命令:
roscorecd ~/mywanderbot_ws/src/mywanderbot/src
python key_publisher.pycd ~/mywanderbot_ws/src/mywanderbot/src
python keys_to_twist_rate.py最后我们新开一个终端,再来看下输出速率:rostopic hz cmd_vel
subscribed to [/cmd_vel]
average rate: 10.002
min: 0.099s max: 0.101s std dev: 0.00045s window: 10
average rate: 9.998
min: 0.099s max: 0.101s std dev: 0.00050s window: 20
average rate: 9.996
min: 0.099s max: 0.101s std dev: 0.00049s window: 30
average rate: 10.000
min: 0.098s max: 0.103s std dev: 0.00081s window: 40
average rate: 10.000
min: 0.098s max: 0.103s std dev: 0.00078s window: 50
average rate: 10.000
min: 0.098s max: 0.103s std dev: 0.00079s window: 60
...
可以看到结果,基本是稳定的10Hz的输出速率。
3.3、rqt_graph
我们可以查看下目前有哪些相关节点,以及它们之间的关系,可以输入:rostopic info cmd_vel
Type: geometry_msgs/Twist
Publishers:
* /keys_to_twist (http://YAB:41117/)
* /keys_to_twist_rate (http://YAB:40317/)Subscribers:
* /rostopic_5913_1696473604053 (http://YAB:46119/)
* /rostopic_5956_1696473632865 (http://YAB:45937/)
* /rostopic_6042_1696476700529 (http://YAB:44365/)
* /rostopic_6083_1696476719297 (http://YAB:33923/)
* /rostopic_6475_1696476841619 (http://YAB:45707/)
可以看到有两个发布者,下面就是很多的订阅者。
类型是geometry_msgs/Twist,我们可以详细查看其结构:rosmsg show geometry_msgs/Twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
可以看到成员类型是geometry_msgs/Vector3,有三个域分别是x、y、z
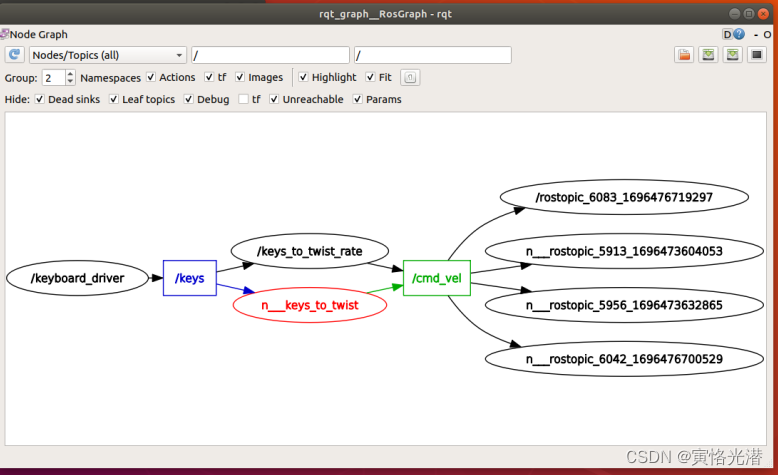
我们还可以对其可视化,输入:rqt_graph
3.4、rqt_plot
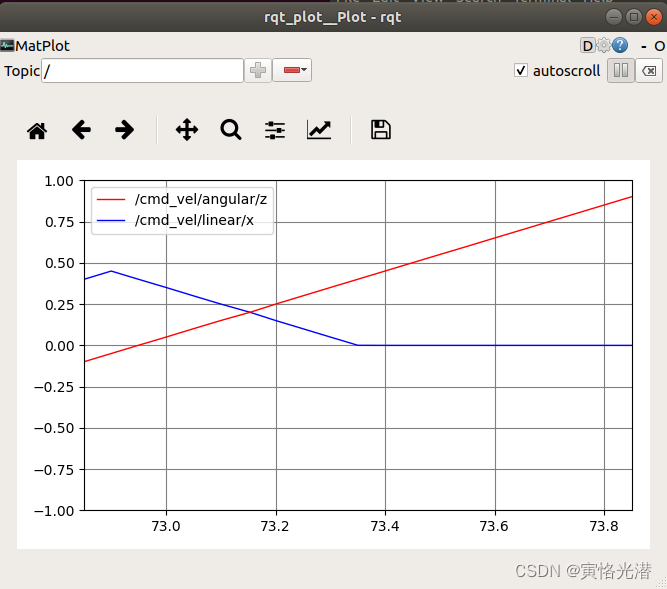
从上面我们知道了话题名称和消息中域的名字,我们可以选择感兴趣的域,将这些数据流绘制出来,那么这节主要就是线速度X跟角速度Z,所以我们对这两个域进行绘制
rqt_plot cmd_vel/linear/x cmd_vel/angular/z
当我们按下键的时候,速度命令就会改变,我们来看下绘制的情况,暂停截图如下:

4、参数服务器
上面的速度绘制图,我们观察发现,速度一直是0、1、-1三种取值,在ROS中使用的是SI(国际)单位制,也就是机器人以每秒一米的速度向前向后,以每秒一弧度的角速度左右旋转。
然而,在不同场景,机器人的运行速度是完全不一样的,有的地方1m/s速度太慢了,有的地方却可能太快了,所以我们需要找到一种把程序参数化的方法,这样它才能应用到不同的机器人。
cd ~/mywanderbot_ws/src/mywanderbot/src
gedit keys_to_twist_parameterized.py
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
from geometry_msgs.msg import Twistkey_mapping={'w':[1,0],'x':[-1,0],'a':[0,1],'d':[0,-1],'s':[0,0]}
g_last_twist=None
g_vel_scales=[0.1,0.1]def keys_cb(msg,twist_pub):global g_last_twist,g_vel_scalesif len(msg.data)==0 or not key_mapping.has_key(msg.data[0]):returnvels=key_mapping[msg.data[0]]g_last_twist.linear.x=vels[0]*g_vel_scales[0]g_last_twist.angular.z=vels[1]*g_vel_scales[1]twist_pub.publish(g_last_twist)if __name__=='__main__':rospy.init_node('keys_to_twist_parameterized')twist_pub=rospy.Publisher('cmd_vel',Twist,queue_size=1)rospy.Subscriber('keys',String,keys_cb,twist_pub)g_last_twist=Twist()if rospy.has_param('~linear_scale'):g_vel_scales[0]=rospy.get_param('~linear_scale')else:rospy.logwarn('linear_scale not provided,using %.1f'%g_vel_scales[0])if rospy.has_param('~angular_scale'):g_vel_scales[1]=rospy.get_param('~angular_scale')else:rospy.logwarn('angular_scale not provided,using %.1f'%g_vel_scales[1])rate=rospy.Rate(10)while not rospy.is_shutdown():twist_pub.publish(g_last_twist)rate.sleep()
加个可执行权限:chmod u+x keys_to_twist_parameterized.py
分别开启终端,输入如下命令:
roscorecd ~/mywanderbot_ws/src/mywanderbot/src
python key_publisher.pycd ~/mywanderbot_ws/src/mywanderbot/src
./keys_to_twist_parameterized.py这里如果没有指定参数就会出现警告,输入不带参数: ./keys_to_twist_parameterized.py
[WARN] [1696558099.873788]: linear_scale not provided,using 0.1
[WARN] [1696558099.875360]: angular_scale not provided,using 0.1
日志保存在cd ~/.ros/log这里里面的对应文件:cat keys_to_twist_parameterized.log
当然日志太多,用不着的话可以全部清理:rospy purge
正常带参数的输入:./keys_to_twist_parameterized.py _linear_scale:=0.8 _angular_scale:=0.7
这里的参数赋值,需要注意的是使用的是海象运算符(:=)
最后再开一个终端我们来测试下新的速度是否有变化:rostopic echo cmd_vel
然后我们在运行key_publisher.py的这个终端,按键w,将出现如下速度:
linear:
x: 0.8
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
按键a,将出现如下速度:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.7
可以看到,参数的指定也更改了对应的速度值。
5、加速度
我们知道在现实世界里面,任何物体都是有质量的,所以机器人不能瞬间启动与停止,而是需要一个加速与减速的过程,而且当速度立马切换到非常快的时候,开车的朋友都清楚,容易出现打滑等情况,所以我们也不能给机器人发送不合理的速度命令,为了避免这些问题,我们把速度命令设置成一个斜坡上升或下降的过程。
cd ~/mywanderbot_ws/src/mywanderbot/src
gedit keys_to_twist_ramps.py
加个可执行权限:chmod u+x keys_to_twist_ramps.py
我们可以先来测试下,再次之前需要启动roscore,然后输入:./keys_to_twist_ramps.py
parameter [~linear_scale] not found,using 0.100
parameter [~angular_scale] not found,using 0.100
parameter [~linear_accel] not found,using 1.000
parameter [~angular_accel] not found,using 1.000这段代码,就是在前面的基础上,做一个速度阶跃的增加与减少,这样即使我们发给机器人是瞬时变化的速度或者是阶跃式的命令,都会被减缓成斜坡状。主要就是ramped_vel这个函数,每次被调用,都会向目标速度前进一步,如果距离目标速度小于一个step步长的话,就直接赋值目标速度。然后通过ramped_twist函数计算得到twist,再通过send_twist进行发布即可。后面的回调函数以及获取参数的方法跟前面差不多,这里就不赘述了。
整体来测试下,分别开启终端,输入如下命令
roscorecd ~/mywanderbot_ws/src/mywanderbot/src
python key_publisher.pycd ~/mywanderbot_ws/src/mywanderbot/src
./keys_to_twist_ramps.py _linear_scale:=0.5 _angular_scale:=1.0 _linear_accel:=1.0 _angular_accel:=1.0跟前面一样,我们使用rqt_plot程序来生成一个实时的速度图
rqt_plot cmd_vel/linear/x cmd_vel/angular/z
在key_publisher.py这个终端进行按键测试,我们就能够实时看到绘制的速度图了。跟前面的速度绘制图进行比较,我们也可以发现,速度在上升与下降的过程都消耗了一定的时间,加速度有限,所以这些命令在现实中是可以实现的。
也可以直接观察仿真机器人的行驶情况,打开命令
roslaunch turtlebot3_gazebo turtlebot3_world.launch
6、launch文件
对于上面的节点,我们每次要启动很多终端,比较繁琐,现在我们来回顾下以前学习过的launch文件,可以批量启动节点,有兴趣的可以查阅:ROS机器人操作系统Catkin的编译与常用命令的使用介绍 里面有对launch文件的更具体介绍
操作如下:
cd ~/mywanderbot_ws/src/mywanderbot
mkdir launch
cd launch
gedit test.launch<launch>
<node name="key_publisher" pkg="mywanderbot" type="key_publisher.py" respawn="false" output="screen" />
<node name="keys_to_twist_ramps" pkg="mywanderbot" type="keys_to_twist_ramps.py" respawn="false" output="screen"><param name="linear_scale" type="double" value="0.5" /><param name="angular_scale" type="double" value="1.0" /><param name="linear_accel" type="double" value="1.0" /><param name="angular_accel" type="double" value="1.0" />
</node>
</launch>加个可执行权限:chmod u+x test.launch
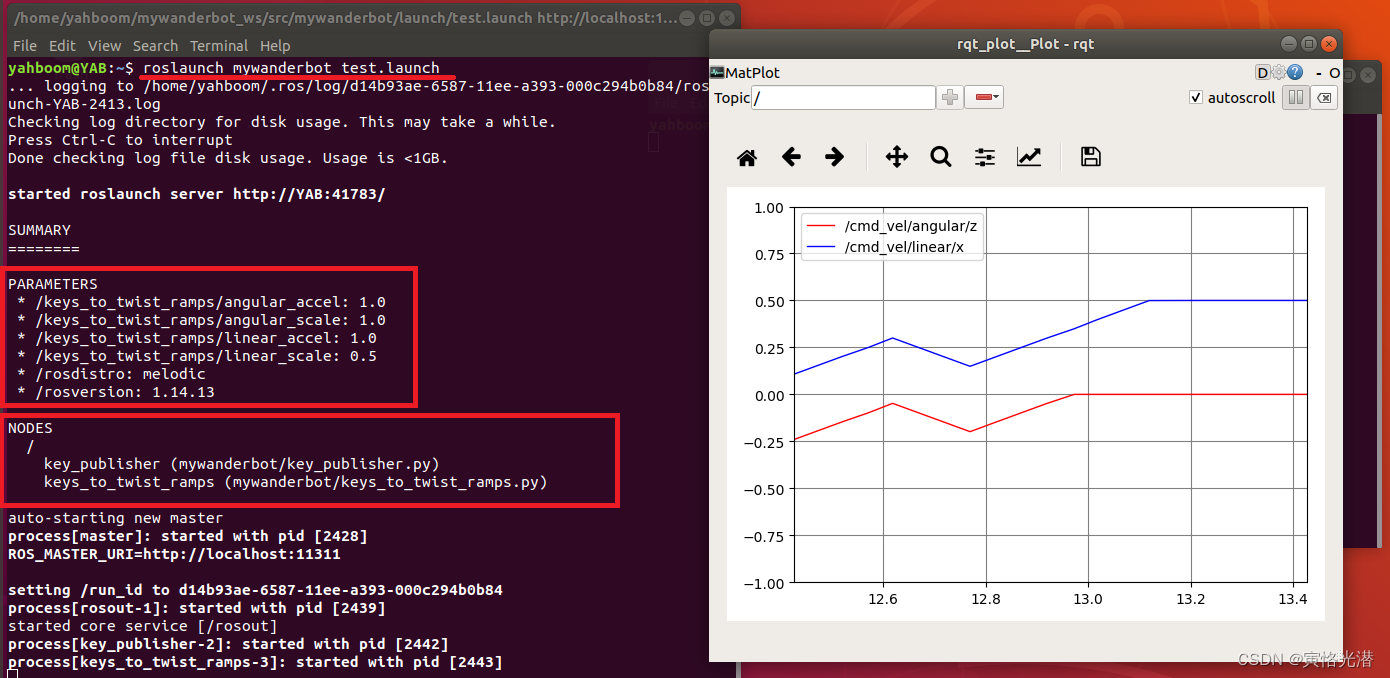
执行launch文件:roslaunch mywanderbot test.launch
这样就启动了定义的两个节点,以及将定义的参数也会加载到参数服务器里面
我们可以查看下实时速度:rqt_plot cmd_vel/linear/x cmd_vel/angular/z
如下图:
相关文章:
ROS键盘遥控机器人,通过参数服务器指定速度
1、引言 在上节的驱动机器人,我们知道是cmd_vel话题发布一串Twist类型消息来控制,我们可以输入如下命令查看这个Twist的详细信息:rosmsg show geometry_msgs/Twist geometry_msgs/Vector3 linear float64 x float64 y float64 z geome…...
具有快表的地址变换机构
1.快表(TLB) 快表,又称联想寄存器(TLB,translation lookaside buffer), 是一种访问速度比内存快很多的高速缓存(TLB不是内存! ), 用来存放最近访问的页表项的副本,可以加速地址变换的速度。 与…...

【使用python和flask建个人博客】修复侧边栏最新文章、最多阅读等链接不能打开的问题
自从上次因版本兼容问题修改过部分代码之后,好长时间没光顾woniunote这个个人博客模块了,最近发文章的时候发现侧边栏的文章打不开,定位了bug,并进行了修复。 <div class="col-12 side"><div class="tip" align...
ShareX使用说明——优秀的录屏软件
ShareX初识 ShareX 是一个自由及开放源代码的截图录像软件,目前仅支持Windows系统。 项目源代码在GitHub平台上发布, 软件可以在Microsoft商店和Steam上下载。 ShareX is a free and open source program that lets you capture or record any area of y…...
10.14~10.15verilog操作流程与Block Design
后面的那个是延时精度 verilog文件结构 文件名称与写的模板没有关系,这个文件名为P1,但模板名为andgate 但是如果是仿真文件,就需要开头的模板名和仿真文件名相同 .v是源文件,设计文件 .v在设计与sim里都有,静态共享࿰…...

小解C语言文件编译过程【linux】
小解C语言文件编译过程【linux】 库动态库静态库 C语言文件 程序编译过程整体预处理编译汇编链接动态链接静态链接两种方法对比 库 看到标题是文件编译过程 但是开头却是库,这可不是挂羊头卖狗肉,而是因为库也是代码不可缺少的一部分,并且在…...
[Python]黑色背景白色块滑动视频
黑色背景白色块滑动视频,单帧效果如下: 配置参数 1920 1080 400 400 300 60 1920x1080.avi import numpy as np import cv2 as cv import os import syswidth 1920 height 1080 rect_szx 400 rect_szy 300 sz_y_init 400 fps 24width int(sys.a…...

【linux kernel】对linux内核设备的注册机制和查找机制分析
文章目录 1、简介2、device_initialize分析3、device_add分析4、总结 🔺【linux内核系列文章】 👉对一些文章内容进行了勘误,本系列文章长期不定时更新,希望能分享出优质的文章! 1、《linux内核数据结构分析之哈希表》…...
asp.net酒店餐饮管理系统VS开发sqlserver数据库web结构c#编程Microsoft Visual Studio
一、源码特点 asp.net酒店餐饮管理系统是一套完善的web设计管理系统,系统具有完整的源代码和数据库,系统主要采用B/S模式开发。开发环境为vs2010,数据库为sqlserver2008,使用c#语言 开发 ASP.NE 酒店餐饮管理系统 二、功能…...
38_Nginx 启动流程
文章目录 src/core/nginx.cint ngx_cdecl main(int argc, char *const *argv) {ngx_buf_t *b;...
数据特征选择 | Lasso特征选择(Python)
文章目录 效果一览文章概述源码设计小结效果一览 文章概述 Lasso算法是一种经典的线性回归算法,被广泛应用于特征选择和降维问题。相较于传统的线性回归算法,Lasso算法能够在保持预测准确性的同时,自动筛选出对目标变量影响较大的特征变量,从而达到降低模型复杂度、提高泛化…...

最小覆盖子串[困难]
优质博文:IT-BLOG-CN 一、题目 给你一个字符串s、一个字符串t。返回s中涵盖t所有字符的最小子串。如果s中不存在涵盖t所有字符的子串,则返回空字符串"" 。 对于t中重复字符,我们寻找的子字符串中该字符数量必须不少于t中该字符数量…...
保姆级搭建Mysql 并进行视图可视化操作
安装MySQL数据库 选择mysql5.7.36_x32.msi”,双击运行,如下图所示: 在此窗口中,选择“Custom”选项,点击“Next>”进入下一步; 在此窗口中,选择号下的MySQL Server 5.7.36 – x64&…...

设计模式的学习顺序
设计模式的学习顺序可以按照以下步骤进行: 掌握基础知识:先确保你对编程语言和软件开发的基本概念有深入的理解,包括面向对象编程、继承、多态等。学习常用设计模式:首先学习并理解一些常用的设计模式,例如单例模式、…...

数据结构和算法——树结构
二叉树 又叫二叉排序树。 节点是数量为,,n为层数。 满二叉树:所有的叶子节点都在最后一层。 完全二叉树:如果所有叶子节点都在最后一层和倒数第二层,而且每个叶子节点都有左右子节点。 完全二叉树 前序遍历 1、先输…...

【Java】Integer包装类
Integer:对基本数据类型 int 实现包装 方法名称说明public Integer(int value)根据 int 值创建 Integer 对象(JDK9以后过时)public integer(String s)根据 String 值创建 Integer 对象…...
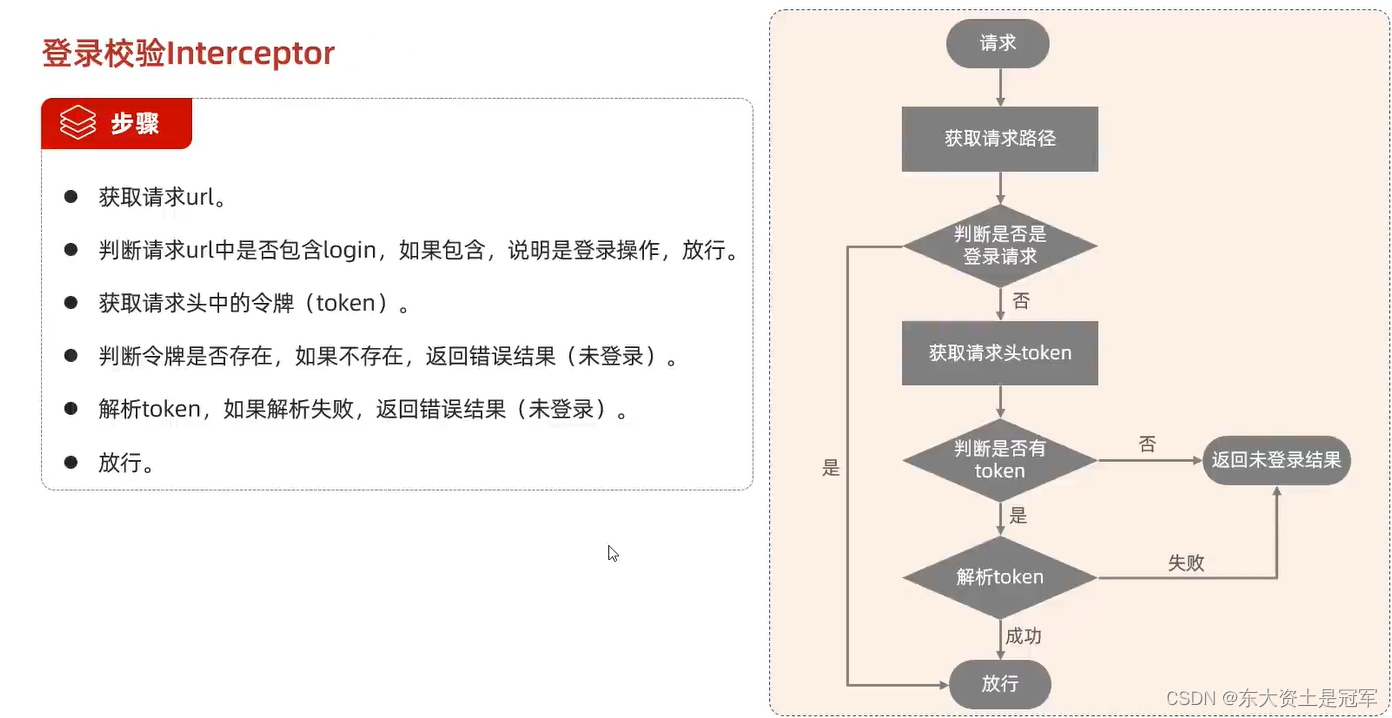
Web后端开发登录校验及JWT令牌,过滤器,拦截器详解
如果用户名正确则成功进入 登录功能 代码 Controller Service Mapper 结果 若登录成功结果如下: 如果登录失败,结果如下 登录校验 为什么需要登录校验 有时再未登录情况下, 我们也可以直接访问部门管理, 员工管理等功能 因此我们需要一个登录校验操作, 只有确认用户登录…...

大语言模型迎来重大突破!找到解释神经网络行为方法
前不久,获得亚马逊40亿美元投资的ChatGPT主要竞争对手Anthropic在官网公布了一篇名为《朝向单义性:通过词典学习分解语言模型》的论文,公布了解释经网络行为的方法。 由于神经网络是基于海量数据训练而成,其开发的AI模型可以生成…...

zabbix内置宏、自动发现与注册
一、zabbix内置宏 1、概念: 在Zabbix中,内置宏是一种特殊的变量,通常用在 Trigger 名称和表达式中,引用有关监控对象的信息。 2、种类: {HOST.NAME} 主机名 {HOST.IP} 主机 IP 地址 {TRIGGER.DESCRIPTION} 触…...

Oracle与Mysql语法区别
database 一、数据类型二、update..select语句三、upsert语句四、常见函数五、自动更新列时间戳一、数据类型 OracleMysqlnumberint/decimal变长字符:varchar2varchardatedatetime/timestampinttinyint/smallint/mediumint/int/bigint二、update…select语句 Oracle update t…...

[特殊字符] 智能合约中的数据是如何在区块链中保持一致的?
🧠 智能合约中的数据是如何在区块链中保持一致的? 为什么所有区块链节点都能得出相同结果?合约调用这么复杂,状态真能保持一致吗?本篇带你从底层视角理解“状态一致性”的真相。 一、智能合约的数据存储在哪里…...

springboot 百货中心供应链管理系统小程序
一、前言 随着我国经济迅速发展,人们对手机的需求越来越大,各种手机软件也都在被广泛应用,但是对于手机进行数据信息管理,对于手机的各种软件也是备受用户的喜爱,百货中心供应链管理系统被用户普遍使用,为方…...
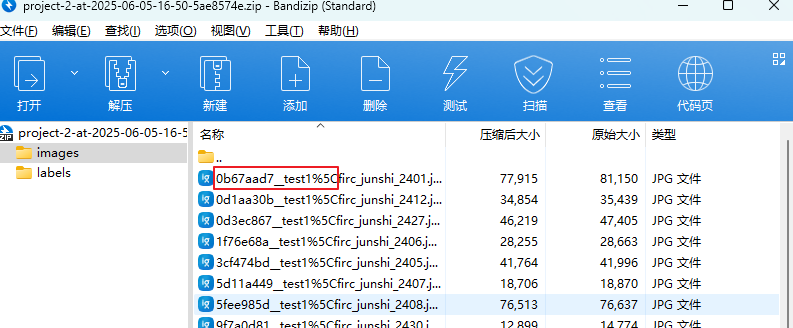
label-studio的使用教程(导入本地路径)
文章目录 1. 准备环境2. 脚本启动2.1 Windows2.2 Linux 3. 安装label-studio机器学习后端3.1 pip安装(推荐)3.2 GitHub仓库安装 4. 后端配置4.1 yolo环境4.2 引入后端模型4.3 修改脚本4.4 启动后端 5. 标注工程5.1 创建工程5.2 配置图片路径5.3 配置工程类型标签5.4 配置模型5.…...
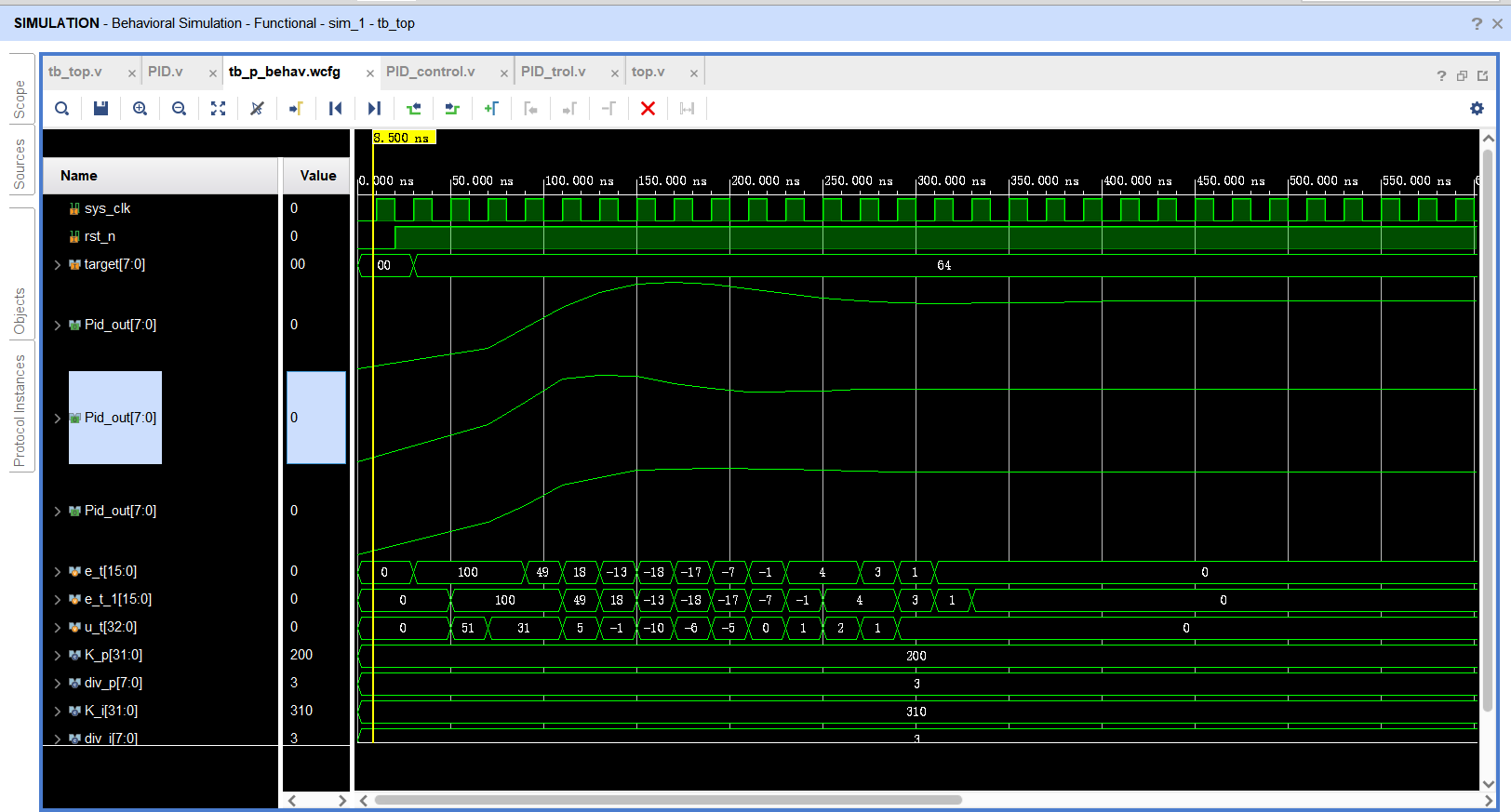
基于FPGA的PID算法学习———实现PID比例控制算法
基于FPGA的PID算法学习 前言一、PID算法分析二、PID仿真分析1. PID代码2.PI代码3.P代码4.顶层5.测试文件6.仿真波形 总结 前言 学习内容:参考网站: PID算法控制 PID即:Proportional(比例)、Integral(积分&…...
【HarmonyOS 5.0】DevEco Testing:鸿蒙应用质量保障的终极武器
——全方位测试解决方案与代码实战 一、工具定位与核心能力 DevEco Testing是HarmonyOS官方推出的一体化测试平台,覆盖应用全生命周期测试需求,主要提供五大核心能力: 测试类型检测目标关键指标功能体验基…...

Swift 协议扩展精进之路:解决 CoreData 托管实体子类的类型不匹配问题(下)
概述 在 Swift 开发语言中,各位秃头小码农们可以充分利用语法本身所带来的便利去劈荆斩棘。我们还可以恣意利用泛型、协议关联类型和协议扩展来进一步简化和优化我们复杂的代码需求。 不过,在涉及到多个子类派生于基类进行多态模拟的场景下,…...
DIY|Mac 搭建 ESP-IDF 开发环境及编译小智 AI
前一阵子在百度 AI 开发者大会上,看到基于小智 AI DIY 玩具的演示,感觉有点意思,想着自己也来试试。 如果只是想烧录现成的固件,乐鑫官方除了提供了 Windows 版本的 Flash 下载工具 之外,还提供了基于网页版的 ESP LA…...

实现弹窗随键盘上移居中
实现弹窗随键盘上移的核心思路 在Android中,可以通过监听键盘的显示和隐藏事件,动态调整弹窗的位置。关键点在于获取键盘高度,并计算剩余屏幕空间以重新定位弹窗。 // 在Activity或Fragment中设置键盘监听 val rootView findViewById<V…...
分布式增量爬虫实现方案
之前我们在讨论的是分布式爬虫如何实现增量爬取。增量爬虫的目标是只爬取新产生或发生变化的页面,避免重复抓取,以节省资源和时间。 在分布式环境下,增量爬虫的实现需要考虑多个爬虫节点之间的协调和去重。 另一种思路:将增量判…...

AI,如何重构理解、匹配与决策?
AI 时代,我们如何理解消费? 作者|王彬 封面|Unplash 人们通过信息理解世界。 曾几何时,PC 与移动互联网重塑了人们的购物路径:信息变得唾手可得,商品决策变得高度依赖内容。 但 AI 时代的来…...