软中断与tasklet简介
一、软中断
1.1 何为软中断?
Linux 系统为了解决中断处理程序执行过长的问题,将中断过程分成了两个阶段,分别是「上半部(Top Half)和下半部分(Bottom Half)」。
-
上半部用来快速处理中断。一般会暂时关闭中断请求,主要负责处理跟硬件紧密相关或者时间敏感的事情。
-
下半部用来延迟处理上半部未完成的工作。下半部由中断上半部分触发,主要是负责上半部未完成的工作,通常都是耗时比较长的事情,特点是延迟执行,一般以「内核线程」的方式运行。
软中断是内核实现中断下半部处理的机制之一。由中断上半部分触发,在专用的软中断守护线程ksoftirqd中或者在满足一定条件时在硬中断返回前被处理。
1.2 内核中记录软中断的数据结构
软中断描述符
struct softirq_action
{//只有一个action函数指针,该指针指向了软中断处理函数。void (*action)(struct softirq_action *);
};
软中断向量表
static struct softirq_action softirq_vec[NR_SOFTIRQS] __cacheline_aligned_in_smp;
由多个softirq_action 组成,目前linux共支持10类型的软中断,具体如下:
enum
{HI_SOFTIRQ=0,//------------------------最高优先级的软中断类型,给高优先级的tasklet使用TIMER_SOFTIRQ,//-----------------------Timer定时器软中断NET_TX_SOFTIRQ,//----------------------发送网络数据包软中断NET_RX_SOFTIRQ,//----------------------接收网络数据包软中断BLOCK_SOFTIRQ,//-----------------------块设备软中断BLOCK_IOPOLL_SOFTIRQ,//----------------块设备软中断TASKLET_SOFTIRQ,//---------------------专门为tasklet机制准备的软中断SCHED_SOFTIRQ,//-----------------------进程调度以及负载均衡软中断HRTIMER_SOFTIRQ,//---------------------高精度定时器软中断RCU_SOFTIRQ, /* Preferable RCU should always be the last softirq*/// --RCU服务软中断NR_SOFTIRQS
};
在enum中出现的顺序就是软中断的优先级,优先级越高越先被处理。
软中断状态寄存器
irq_cpustat_t __softirq_pending,其实就是一个unsigned int类型的变量,用于记录软中断是否发生,目前只用到了前10位。该变量并非全系统共用,而是每个CPU都有。
1.3 软中断的注册与激活
软中断注册
void open_softirq(int nr, void (*action)(struct softirq_action *))
{softirq_vec[nr].action = action;
}
//例如: open_softirq(NET_TX_SOFTIRQ, net_tx_action);
open_softirq由内核提供,驱动程序可通过调用该函数将软中断服务程序软中断向量号绑定(bind)。
软中断的激活
void raise_softirq(unsigned int nr)
{unsigned long flags;local_irq_save(flags);raise_softirq_irqoff(nr);//该函数完成软中断的激活local_irq_restore(flags);
}inline void raise_softirq_irqoff(unsigned int nr)
{__raise_softirq_irqoff(nr);//将软中断状态寄存器 __softirq_pending的第nr(nr从0开始)位 置为1if (!in_interrupt()) //判断当前调用是否在中断上下文中wakeup_softirqd(); //若不是在中断环境中则激活ksoftirqd线程处理软中断
}
软中断的激活表示软中断发生,调用路径为raise_softirq--->raise_softirq_irqoff ,raise_softirq_irqoff 函数主要完成将软中断状态寄存器中的nr位置为1表示向量号为nr的软中断已经发生,然后判断当前调用是否在中断环境中,若不在中断环境中则唤起ksoftirqd线程处理软中断。
注:软中断激活并不意味着软中断被立即处理。因为软中断的处理是异步的,激活仅仅是表示软中断发生,至于何时处理软中断下文将对此进行说明。
1.4 软中断的处理
何时处理软中断?
首先,处理软中断的函数为__do_softirq(),此函数会在两个地方被调用:
- 中断上半部完成时,会调用
irq_exit(),然后irq_exit-->invoke_softirq-->__do_softirq()。但是此处调用__do_softirq()是有**“条件”**的,只有条件满足时才会处理软中断,具体条件下文将介绍。 - 在ksoftirqd守护线程的执行函数中。
irq_exit中处理软中断
void irq_exit(void)
{.......//省略与软中断处理无关的代码preempt_count_sub(HARDIRQ_OFFSET);//修改preempt_count标志,表示退出硬中断上下文环境if (!in_interrupt() && local_softirq_pending())//检查是否在中断上下文环境中//以及有无待处理的软中断invoke_softirq();//处理软中断.......//省略与软中断处理无关的代码
}
irq_exit中调用preempt_count_sub(HARDIRQ_OFFSET)为hardirq_count减去1,hardirq_count表示中断嵌套的层数,0表示没有中断发生,该变量通常用于检查当前环境是否为中断上下文环境。preempt_count_sub(HARDIRQ_OFFSET)可以理解为退出当前硬中断上下文环境。
in_interrupt()会检查softirq_count与hardirq_count的值判断当前是否在软/硬中断的上下文环境中。
local_softirq_pending()会检查当前有无需要待处理的软中断。
irq_exit函数首先标记退出当前硬中断上下文环境,然后在检查当前是否在中断上下文环境;若是,则说明当前为嵌套中断(嵌套了硬中断或者抢占了软中断处理线程),此时不应该继续处理软中断;若否,则继续判断当前有无待处理的软中断,若有则调用invoke_softirq处理软中断。
static inline void invoke_softirq(void)
{if (!force_irqthreads) {//检查有无强制线程化
#ifdef CONFIG_HAVE_IRQ_EXIT_ON_IRQ_STACK/** We can safely execute softirq on the current stack if* it is the irq stack, because it should be near empty* at this stage.*/__do_softirq();
#else/** Otherwise, irq_exit() is called on the task stack that can* be potentially deep already. So call softirq in its own stack* to prevent from any overrun.*/do_softirq_own_stack();
#endif} else {wakeup_softirqd();}
}
invoke_softirq函数首先检查有无中断处理强制线程化,若有则唤起软中断处理守护线程ksoftirqd处理软中断。中断处理强制线程化是linux编译时的一个预定义,当启用时会强制所有中断都由中断线程处理,目前linux安装时并不会开启该功能。
当没有启用强制中断线程化时,软中断的处理也分成两种情况,主要是和软中断执行的时候使用的stack相关。如果arch支持单独的IRQ STACK,这时候,由于要退出中断,因此irq stack已经接近全空了,因此直接调用__do_softirq() 处理软中断就OK了,否则就调用do_softirq_own_stack函数在软中断自己的stack上执行。
注:irq_exit中执行软中断,此时的执行环境仍然在中断上下文中。也就是说硬中断还没有执行iret,没有恢复到进程上下文中。__do_softirq()函数是处理触发的所有软中断,因此并非在硬中断结束时只处理在硬中断中触发软中断
ksoftirqd中处理软中断
run_ksoftirqd为ksoftirqd守护线程执行函数。
static void run_ksoftirqd(unsigned int cpu){local_irq_disable();//关中断if (local_softirq_pending()) {//检查有无需要处理的软中断/** We can safely run softirq on inline stack, as we are not deep* in the task stack here.*/__do_softirq();//处理软中断local_irq_enable();//开中断cond_resched();//调度return;}local_irq_enable();}
ksoftirqd守护线程会关闭中断然后检查有无待处理的软中断,若有则调用__do_softirq()处理软中断,然后开中断,然后调用cond_resched()尽可能保证其他线程也能被正常调度到。
注:ksoftirqd是能被硬件中断所抢占的,run_ksoftirqd函数中一开始关中断是为了防止在检查有无需要处理的软中断时被中断,__do_softirq()在处理软中断时会开中断。
__do_softirq()
void __do_softirq(void)
{unsigned long end = jiffies + MAX_SOFTIRQ_TIME;//MAX_SOFTIRQ_TIME为2msint max_restart = MAX_SOFTIRQ_RESTART; //MAX_SOFTIRQ_RESTART为10次……pending = local_softirq_pending();//--获取softirq pending的状态__local_bh_disable_ip(_RET_IP_, SOFTIRQ_OFFSET);//标识下面的代码是正在处理softirqcpu = smp_processor_id();
restart:set_softirq_pending(0); //----清除pending标志local_irq_enable(); //------打开中断,softirq handler是开中断执行的h = softirq_vec; //-------获取软中断描述符指针//寻找pending中第一个被设定为1的bit,寻找顺序与软中断优先级一致while ((softirq_bit = ffs(pending))) {unsigned int vec_nr;int prev_count;h += softirq_bit - 1; //------指向pending的那个软中断描述符vec_nr = h - softirq_vec;//----获取soft irq numberh->action(h);//-----指向softirq handler;真正执行中断服务程序h++;pending >>= softirq_bit;}local_irq_disable(); //---关闭本地中断pending = local_softirq_pending();//---再次获取 软中断状态寄存器的值if (pending) {if (time_before(jiffies, end) && !need_resched() &&--max_restart)//判断是否超时、是否需要调度、是否超过restart最大次数goto restart;//继续循环wakeup_softirqd();}__local_bh_enable(SOFTIRQ_OFFSET);//------标识softirq处理完毕}
__do_softirq处理系统中的所有软中断(而不是针对某一特定的软中断)。函数执行过程中会先关闭中断,读取软中断状态寄存器的所有状态信息以获取哪一个软中断已经发生,然后开中断按照优先级依次执行已经被激活的软中断的处理函数,完成本轮处理后判定有无继续执行的**“条件”**,所谓的条件指的是下面三个条件的交集:
__do_softirq执行时间未超过2ms。restart次数不超过10次。restart次数表示一共处理了几轮软中断,当处理完软中断状态寄存器中所有的已激活的软中断时算作1轮。- 内核中没有线程需要调度。
注:__do_softirq在获取软中断状态寄存器时是关中断的,在执行软中断处理函数时是开中断的,因此软中断处理过程中可以被硬中断打断,但是不同类型的软中断在处理过程中是按照优先级串行处理的,而且软中断不可以打断软中断。
1.5 总结
目前linux内核支持10种类型的软中断,内核中维护一个软中断向量表用于记录着每个软中断的处理函数,驱动程序可以将软中断处理函数注册给内核。软中断处理过程中本着**“何处触发,何处处理”的原则,软中断在哪个CPU上被触发就需要在哪个CPU上处理,每个CPU都有一个“软中断状态寄存器”**(本质上是一个32bit的变量)记录着当前软中断的触发情况。
中断处理的上半部分可以通过rasie_softirq函数触发软中断,但是触发软中断并不意味着软中断会被立即处理。软中断会在两种场景下被处理:
irq_exit函数中。此时软中断会在硬中断返回前,且在满足一定 “条件”时会被处理,这个条件指的是 (硬中断返回时有未处理的软中断) 且 (硬中断不是嵌套中断且未打断软中断处理线程)且(没有执行强制中断处理线程化)。满足上述条件时会在硬中断返回前调用__do_softirq,__do_softirq每次调用最多占用2ms,且最多处理10轮软中断,当有线程需要切换时会停止执行。- ksoftirqd软中断守护线程中。该守护线程会先关闭中断去检查有无软中断需要处理,然后调用
__do_softirq去处理已经触发的软中断。执行完__do_softirq会进行线程调度,以防止其他线程发生“饥饿”。
二 、tasklet
2.1何为tasklet?
tasklet是中断下半部分处理的另一种机制,它是基于软中断实现的,使用tasklet实现的中断下半部分的实际处理仍然是由软中断守护进程ksoftirqd或者中断上半部分完成后处理。软中断中向量号为 HI_SOFTIRQ、TASKLET_SOFTIRQ 号对应的软中断处理程序tasklet_hi_action、tasklet_action专门用于处理需要执行的tasklet的两个软中断的,这个两个软中断处理程序是在内核启动时就注册好的,不允许驱动程序注册。tasklet分为两种,分别是有高优先级tasklet和低优先级tasklet,二者只不过在执行时高优先级的会被优先执行(因为高优先级的tasklet对应的软中断优先级高于低优先级tasklet对应的软中断),其原理无差别。
2.2为何要有tasklet?
首先分析下通过软中断处理中断下半段有哪些缺点:
- 软中断处理函数较难开发(需要考虑并行执行的情况)。软中断的处理本着“何处触发,何处处理”的原则,即软中段在哪个CPU上触发就在哪个CPU上处理。软中断一般由硬中断触发,硬中断可以发生在不同CPU上,因此不同CPU可能会同时执行软中断处理函数,所以对驱动开发而言,软中断处理函数需要考虑到并行执行的情况,就难免避不开考虑互斥等操作。
- **软中断的数量是有限的。**上文提到目前Linux支持10类型的软中断,除了内核专用的软中断以外驱动程序只有四个软中断可用(分别给网络设备和块设备用),其他驱动程序需要中断下半段处理时就不够用了。
针对上述问题,tasklet有如下几个特性:
- tasklet处理程序在所有CPU上是串行的。同一时刻某一tasklet的处理程序只能在一个CPU上执行。
- linux 对tasklet无数量限制。
2.3内核中tasklet相关的数据结构
tasklet描述符
struct tasklet_struct
{struct tasklet_struct *next;//------------------多个tasklet串成一个链表。unsigned long state;//--------------------------TASKLET_STATE_SCHED表示tasklet已经//被调度,正准备运行;TASKLET_STATE_RUN表示tasklet正在运行中。atomic_t count;//-------------------------------0表示tasklet处于激活状态;//非0表示该tasklet被禁止,不允许执行。void (*func)(unsigned long);//------------------该tasklet处理程序unsigned long data;//---------------------------传递给tasklet处理函数的参数
};
tasklet描述符中state记录tasklet的状态,当tasklet已经被调度时第TASKLET_STATE_SCHED(0位)位置为1,当tasklet正在被执行时第TASKLET_STATE_RUN(1位)被置为1。atomic_t count用于表示tasklet是否处于可运行状态,0表示可运行,1表示不可运行。func、data变量分别是函数指针和函数参数。
tasklet链表
struct tasklet_head {struct tasklet_struct *head;struct tasklet_struct **tail;
};
每个CPU维护者两个tasklet链表(高优先级、低优先级各一个),链表由多个tasklet描述符组成,记录着等待执行的tasklet。
2.4 tasklet的调度
**tasklet的调度类似于软中断中的触发(激活)操作。**tasklet调度通常发生在中断上半部分,调度后并不立即执行,而是将tasklet描述符挂到当前CPU tasklet链表中,触发软中断,然后等待在软中断处理函数(tasklet_action)中去执行tasklet处理函数。
tasklet 调度函数
static inline void tasklet_schedule(struct tasklet_struct *t)
{//置TASKLET_STATE_SCHED位,如果原来未被置位,则调用__tasklet_schedule()if (!test_and_set_bit(TASKLET_STATE_SCHED, &t->state)) // ----说明(1)__tasklet_schedule(t);
}void __tasklet_schedule(struct tasklet_struct *t)
{unsigned long flags;local_irq_save(flags);t->next = NULL;*__this_cpu_read(tasklet_vec.tail) = t;//将t挂入到tasklet_vec链表中__this_cpu_write(tasklet_vec.tail, &(t->next));raise_softirq_irqoff(TASKLET_SOFTIRQ);//触发 TASKLET_SOFTIRQ 软中断。local_irq_restore(flags);
}
__tasklet_schedule(t)负责将tasklet t挂到当前CPU的tasklet链表中,并触发一次TASKLET_SOFTIRQ软中断。
说明(1):此处测试并置TASKLET_STATE_SCHED位(第0位)。当第0位没有置位时会将该位置位,并调用
__tasklet_schedule(t),当第0位已经置位时,tasklet_schedule不会执行任何操作。这个地方保证了正常情况下每个tasklet在被执行完前只能分配给一个CPU执行。该设置主要应对如下这种情况:
当硬件A触发CPU0硬中断时,在硬中断服务程序中(硬件A的驱动程序)会初始化一个tasklet描述符并调用tasklet_schedule,由于第一次调用tasklet_schedule,此时会将tasklet挂到CPU0的tasklet链表中等待被执行。在该tasklet被执行之前,如果硬件A再次触发硬中断,且硬中断被CPU1响应,此时硬中断服务程序仍然会调用tasklet_schedule,但是tasklet已经被分配给CPU0,所以此次tasklet_schedule不会有任何操作,硬件A驱动中的tasklet不会被分配到CPU1上。
2.4 tasklet 处理程序的执行
负责执行tasklet处理程序的函数
static void tasklet_action(struct softirq_action *a)
{struct tasklet_struct *list;local_irq_disable();//在关中断情况下读取tasklet_vec表头作为临时链表listlist = __this_cpu_read(tasklet_vec.head);__this_cpu_write(tasklet_vec.head, NULL);//重新初始化tasklet_vec__this_cpu_write(tasklet_vec.tail, this_cpu_ptr(&tasklet_vec.head));local_irq_enable();while (list) {//开中断情况下遍历tasklet_vec链表,所以tasklet是开中断的struct tasklet_struct *t = list;list = list->next;if (tasklet_trylock(t)) {//如果返回false,表示当前tasklet已经在其他CPU上运行//这一轮将会跳过此tasklet。确保同一个tasklet只能在一个CPU上运行。if (!atomic_read(&t->count)) {//表示当前tasklet处于激活状态if (!test_and_clear_bit(TASKLET_STATE_SCHED,&t->state))//清TASKLET_STATE_SCHED位;//如果原来没有被置位,则返回0,触发BUG()。BUG();t->func(t->data);//执行当前tasklet处理函数tasklet_unlock(t);continue;//跳到while继续遍历余下的tasklet}tasklet_unlock(t);}local_irq_disable();//此种情况说明即将要执行tasklet时,发现该tasklet已经在别的CPU上运行。t->next = NULL;*__this_cpu_read(tasklet_vec.tail) = t;//把当前tasklet挂入到当前CPU的tasklet_vec中, //等待下一次触发时再执行。__this_cpu_write(tasklet_vec.tail, &(t->next));__raise_softirq_irqoff(TASKLET_SOFTIRQ);//再次置TASKLET_SOFTIRQ位local_irq_enable();}
}
tasklet_action是TASKLET_SOFTIRQ软中断的处理程序。tasklet_action中先关中断获取待处理的tasklet链表,并清空该链表,然后开中断。之后遍历tasklet链表依次执行链表中每个tasklet的处理函数。在执行每个tasklet的处理函数前会调用tasklet_trylock(t),该函数主要是测试tasklet->state中的第TASKLET_STATE_RUN位然后置位。当第TASKLET_STATE_RUN位已经被置位时,说明该tasklet已经在其他CPU上执行了。(问题1) ;然后检查tasklet->count来得知该tasklet是否可执行,然后测试并清空tasklet->state中的第TASKLET_STATE_SCHED位,再然后执行该tasklet的处理函数**(t->func(t->data)此时是开中断的)**。执行完t->func(t->data)后会清掉第TASKLET_STATE_RUN位。
问题1:既然通过测试第TASKLET_STATE_SCHED位可以保证该tasklet不被再次分配到其他CPU上,为什么运行前再检测第TASKLET_STATE_RUN位来保证当前tasklet不被其他CPU运行呢?
答:测试并置位第TASKLET_STATE_SCHED位,仅仅能保证正常情况下tasklet不被分配到其他CPU上。因为在执行t->func(t->data)(tasklet处理函数)时第TASKLET_STATE_SCHED位已经被清掉,而且此时是开中断的,所以执行t->func(t->data)的过程(假设tasklet对应的硬件为HW0,此时CPU0正在执行其处理程序)中有可能会被其他中断中断掉,然后CPU1若来了HW0的硬中断,因为此时的tasklet第TASKLET_STATE_SCHED位已经被清掉,所以中断服务程序可能会将该tasklet添加到CPU1的 tasklet链表中,这样就有可能发生多个CPU并行执行tasklet服务程序的情况。所以在执行t->func(t->data)时要检查并置位第TASKLET_STATE_RUN位。
2.5 总结
本文以低优先级的tasklet为例,阐述了其具体原理。高优先级的tasklet与低优先级的tasklet原理上没有区别,只不过高优先级tasklet的处理在tasklet_hi_action函数中(HI_SOFTIRQ软中断的处理程序)。高优先级tasklet的描述符为tasklet_hi_struct,调度函数为tasklet_hi_schedule。
在处理中断下半部分时,tasklet与软中断机制的区别在于tasklet处理程序在所有CPU间是串行执行的,且系统中没有tasklet的数量限制。每个tasklet描述符除了有tasklet处理程序及其参数外,还有一个state变量和count变量,state记录当前tasklet有没有被调度和运行,通过检查state变量的第0位和第1位可以得知该tasklet有没有被调度和执行。若tasklet被调度但未被执行时,再次调用调度函数不会有任何操作,这保证了tasklet描述符在正常情况下不会被分到其他CPU tasklet链表中。由于执行tasklet处理程序时是开中断的,所以tasklet描述符还是有可能被分到多个CPU tasklet链表中的,所以在执行tasklet处理程序前会检查state变量的第1位,以判断有无被其他CPU执行。count变量用于表示当前tasklet是否已经启用(0表示已经启用),tasklet_enable、tasklet_disable 这两个函数主要通过操作该变量来实现对tasklet的使能/关闭。
相关文章:

软中断与tasklet简介
一、软中断 1.1 何为软中断? Linux 系统为了解决中断处理程序执行过长的问题,将中断过程分成了两个阶段,分别是「上半部(Top Half)和下半部分(Bottom Half)」。 上半部用来快速处理中断。一…...

JUC 之 线程阻塞工具 LockSupport
——LockSupport 与 线程中断 线程中断机制 一个线程不应该由其他线程来强制中断或停止,而是应该由线程自己自行停止,所以,Thread.stop,Thread.suspend,Thread.resume 都已经被废弃 在 Java 中没有办法立即停止一条线…...

常用数据结构总结-Java版
常用数据结构总结(Java版) C/Java/Python 数据结构大比较 [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Dokzp1HQ-1677329125447)(assets/image-20220116142815859.png)] array 同一种类型数据的集合,其实数组…...
【基础算法】二分例题(我在哪?)
🌹作者:云小逸 📝个人主页:云小逸的主页 📝Github:云小逸的Github 🤟motto:要敢于一个人默默的面对自己,强大自己才是核心。不要等到什么都没有了,才下定决心去做。种一颗树,最好的时间是十年前…...

怕上当?来看这份网络钓鱼和诈骗技术趋势
网络钓鱼和诈骗:当前的欺诈类型 网络钓鱼 钓鱼者可以攻击任何在线服务——银行、社交网络、政府门户网站、在线商店、邮件服务、快递公司等——中的证书。但是,顶级品牌的客户往往面临更大风险,因为相比小品牌,人们更喜欢使用和…...

2023年全国最新保安员精选真题及答案6
百分百题库提供保安员考试试题、保安职业资格考试预测题、保安员考试真题、保安职业资格证考试题库等,提供在线做题刷题,在线模拟考试,助你考试轻松过关。 61.关于保安员职业资格条件说法正确的是()。 A:必须考试合格…...

unity热更新新方案,ILRuntime
ILRuntime 是一个独立的、跨平台的 .NET Runtime,可用于在 Unity 中实现热更功能。使用 ILRuntime,您可以在游戏运行时加载和执行 C# 脚本,而不需要重新编译整个项目。 以下是一些使用 ILRuntime 的基本步骤: 在 Unity Asset St…...

【J1】【队列】报数游戏
题目描述 有 n 个小朋友围成一圈玩游戏,小朋友从 1 至 n 编号,2 号小朋友坐在 1 号小朋友的顺时针方向,3 号小朋友坐在 2 号小朋友的顺时针方向,……,1 号小朋友坐在 n 号小朋友的顺时针方向。 游戏开始,…...
《程序员的自我修养》阅读笔记
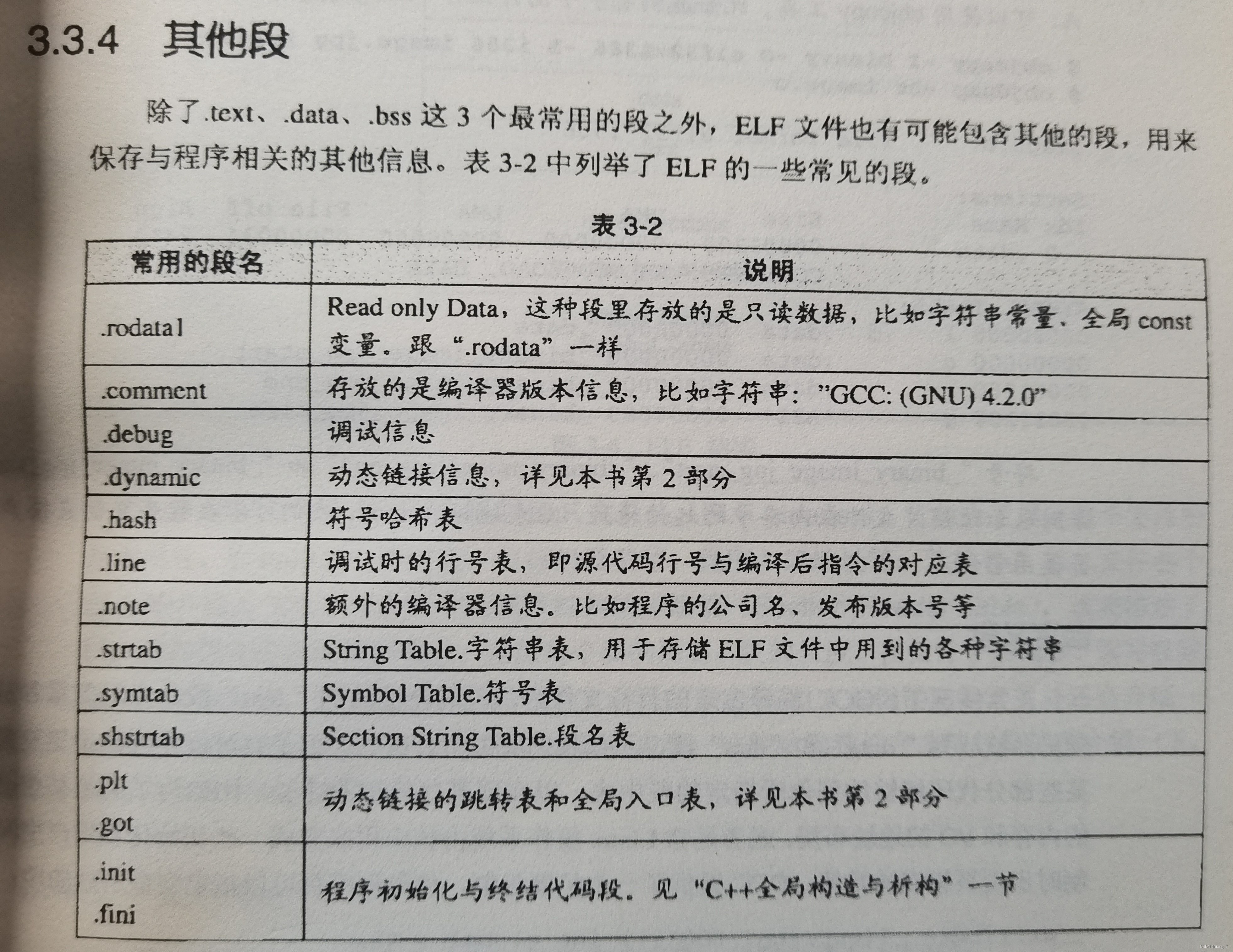
文章目录【第2部分】静态链接1 编译过程2 编辑器的工作流程3 链接——模块的拼接4 目标文件目标文件中的段(section)ELF文件结构5 静态链接1 空间与地址分配2 符号解析与重定位【第3部分】装载与动态链接1 装载的方式2 进程的启动3 为什么需要动态链接&a…...

【跟着ChatGPT学深度学习】ChatGPT带我入门深度学习
❤️觉得内容不错的话,欢迎点赞收藏加关注😊😊😊,后续会继续输入更多优质内容❤️👉有问题欢迎大家加关注私戳或者评论(包括但不限于NLP算法相关,linux学习相关,读研读博…...

软工2023个人作业一——阅读和提问
项目内容这个作业属于哪个课程2023年北航敏捷软件工程这个作业的要求在哪里个人作业-阅读和提问我在这个课程的目标是学习并掌握现代软件开发和项目管理技术,体验敏捷开发工作流程这个作业在哪个具体方面帮助我实现目标通读《构建之法》,了解软件工程中基…...
【Redis】线程模型:Redis是单线程还是多线程?
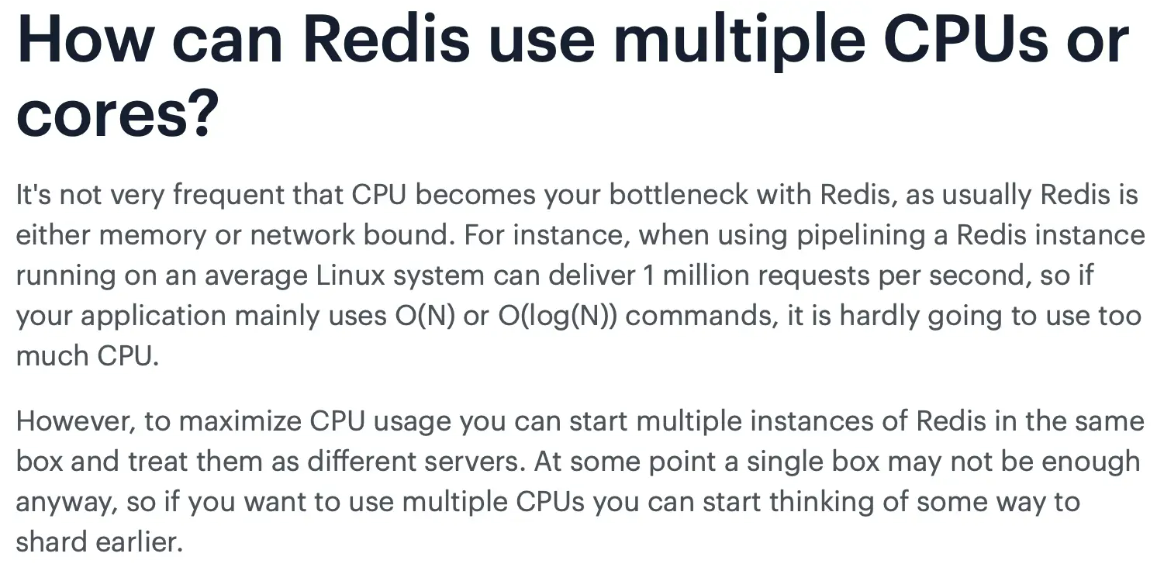
【Redis】线程模型:Redis是单线程还是多线程? 文章目录【Redis】线程模型:Redis是单线程还是多线程?Redis 是单线程吗?Redis 单线程模式是怎样的?Redis 采用单线程为什么还这么快?Redis 6.0 之前…...
)
FSM(有限状态机)
FSM有限状态机FSM创建控制有限状态机的脚本设置FSM状态机下的各个状态添加测试类FSM的优点FSM 虽然Unity已经有了动画状态机,但是为了代码的开放封闭原则,这时FSM有限状态机的作用就凸显了出来。 创建控制有限状态机的脚本 先创建一个脚本用来控制有限…...

奇妙的background-clip:text
我们在学习CSS3时,一个背景属性background-clip用来对背景进行裁剪,即指定背景绘制的区域,通常我们使用的几个属性如下:值说明border-box默认值。背景绘制在边框方框内(剪切成边框方框)。padding-box背景绘…...
Vmware虚拟机无法联通主机解决方法二
昨天在遇到了VMware 虚拟机无法联通主机,导致我在CentOS-7 搭建的伪Hadoop3 服务,无法访问管理平台,使用将网络编辑器修改为“桥接”模式解决。今天在学习HBase 时,昨天的问题又重新了,我通过SSH 工具MobaXterm 都无法…...
Boost资料整理备忘
Boost资料整理备忘 网络资源 书籍: The Boost C Libraries官方文档 Boost Library Documentation random boost.randomBoost随机库的简单使用:Boost.Random(STL通用)tutorialstd::random boost::asio Boost.Asio 网络编程 - 基本原理Boost.Asio DocBoost定时器 网…...

规则引擎与风控系统01:新问题,新挑战
如果说在支付系统中使用设计模式,以及开发自定义协议的物联网这两类应用还不够酷的话,那么接下来,咱们就来学一点高逼格的技术吧。 在互联网已经日益普遍的时代,不管是开发2C应用还是2B应用,相信大部分的开发者都有过处理复杂业务逻辑的经历,比如电商、社交、电子政务、O…...
Oracle-00-卸载篇
这里给出企业级的Oracle 10g的卸教程,新安装的19c并没有正经去做卸载的操作,为了后面教程的进度,这里就先借用下10g,如果有需要会重新更新19c的卸载教程 windows服务中将Oracle所有服务全部停掉 选中Oracle - OraDb10g_home2->Oracle Installation Products->Univers…...
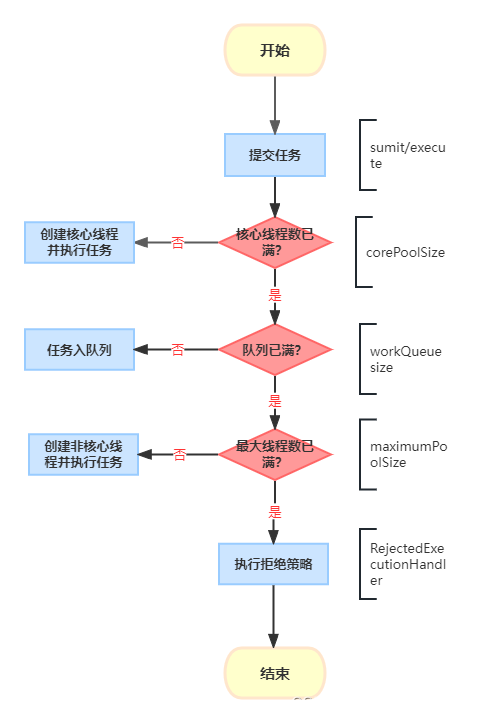
Java线程池使用与原理解析1(线程池优点、使用方法、参数含义及线程池运转机制)
为什么要使用线程池? JDK1.5后JUC包添加了线程池相关接口,在Java诞生之初并没有线程池这个概念。刚开始Java程序都是自行创建线程去处理任务。随着应用使用的线程越来越多,JDK开发者们发现有必要使用一个统一的类来管理这些线程,…...
windows下编译leveldb(动态库+静态库)
环境准备 1)下载cmake并安装 下载路径: https://cmake.org/download/2)下载leveldb源码 git clone https://github.com/google/leveldb.git3)下载googletest和benchmark,cmake编译时需要 # 进入leveldb源码路径下的third_part…...

ssc377d修改flash分区大小
1、flash的分区默认分配16M、 / # df -h Filesystem Size Used Available Use% Mounted on /dev/root 1.9M 1.9M 0 100% / /dev/mtdblock4 3.0M...

《用户共鸣指数(E)驱动品牌大模型种草:如何抢占大模型搜索结果情感高地》
在注意力分散、内容高度同质化的时代,情感连接已成为品牌破圈的关键通道。我们在服务大量品牌客户的过程中发现,消费者对内容的“有感”程度,正日益成为影响品牌传播效率与转化率的核心变量。在生成式AI驱动的内容生成与推荐环境中࿰…...

工程地质软件市场:发展现状、趋势与策略建议
一、引言 在工程建设领域,准确把握地质条件是确保项目顺利推进和安全运营的关键。工程地质软件作为处理、分析、模拟和展示工程地质数据的重要工具,正发挥着日益重要的作用。它凭借强大的数据处理能力、三维建模功能、空间分析工具和可视化展示手段&…...

MySQL中【正则表达式】用法
MySQL 中正则表达式通过 REGEXP 或 RLIKE 操作符实现(两者等价),用于在 WHERE 子句中进行复杂的字符串模式匹配。以下是核心用法和示例: 一、基础语法 SELECT column_name FROM table_name WHERE column_name REGEXP pattern; …...

Rapidio门铃消息FIFO溢出机制
关于RapidIO门铃消息FIFO的溢出机制及其与中断抖动的关系,以下是深入解析: 门铃FIFO溢出的本质 在RapidIO系统中,门铃消息FIFO是硬件控制器内部的缓冲区,用于临时存储接收到的门铃消息(Doorbell Message)。…...
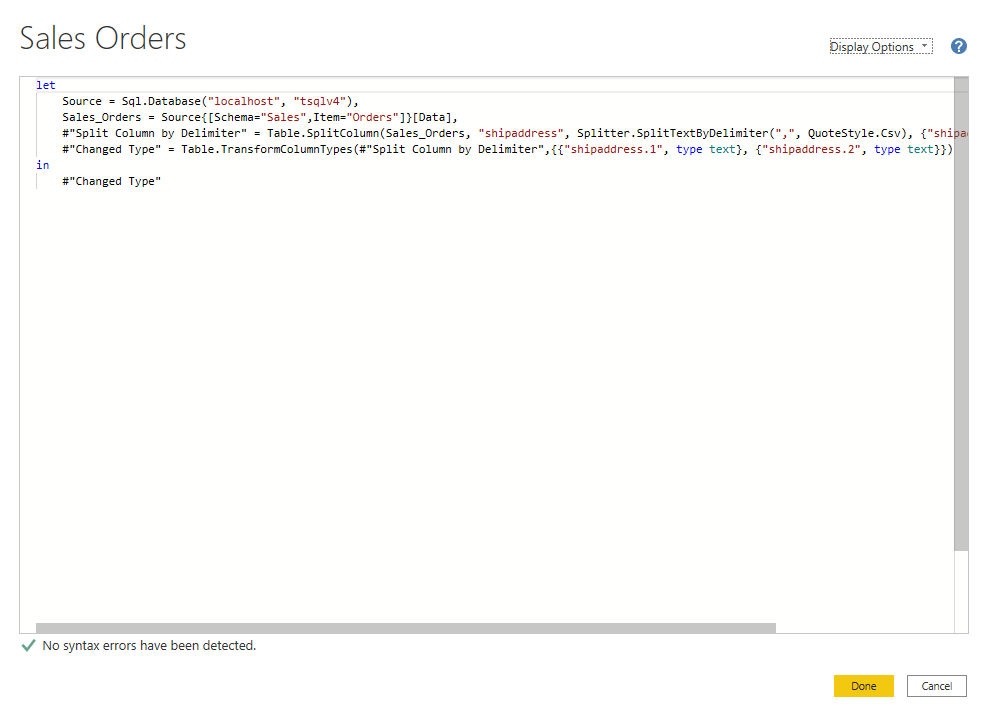
微软PowerBI考试 PL300-在 Power BI 中清理、转换和加载数据
微软PowerBI考试 PL300-在 Power BI 中清理、转换和加载数据 Power Query 具有大量专门帮助您清理和准备数据以供分析的功能。 您将了解如何简化复杂模型、更改数据类型、重命名对象和透视数据。 您还将了解如何分析列,以便知晓哪些列包含有价值的数据,…...

AI,如何重构理解、匹配与决策?
AI 时代,我们如何理解消费? 作者|王彬 封面|Unplash 人们通过信息理解世界。 曾几何时,PC 与移动互联网重塑了人们的购物路径:信息变得唾手可得,商品决策变得高度依赖内容。 但 AI 时代的来…...

LangChain知识库管理后端接口:数据库操作详解—— 构建本地知识库系统的基础《二》
这段 Python 代码是一个完整的 知识库数据库操作模块,用于对本地知识库系统中的知识库进行增删改查(CRUD)操作。它基于 SQLAlchemy ORM 框架 和一个自定义的装饰器 with_session 实现数据库会话管理。 📘 一、整体功能概述 该模块…...
【C++进阶篇】智能指针
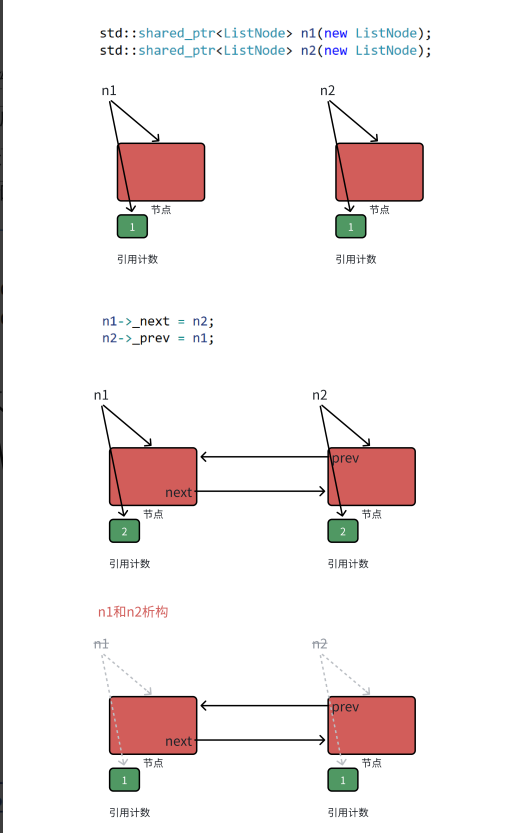
C内存管理终极指南:智能指针从入门到源码剖析 一. 智能指针1.1 auto_ptr1.2 unique_ptr1.3 shared_ptr1.4 make_shared 二. 原理三. shared_ptr循环引用问题三. 线程安全问题四. 内存泄漏4.1 什么是内存泄漏4.2 危害4.3 避免内存泄漏 五. 最后 一. 智能指针 智能指…...

libfmt: 现代C++的格式化工具库介绍与酷炫功能
libfmt: 现代C的格式化工具库介绍与酷炫功能 libfmt 是一个开源的C格式化库,提供了高效、安全的文本格式化功能,是C20中引入的std::format的基础实现。它比传统的printf和iostream更安全、更灵活、性能更好。 基本介绍 主要特点 类型安全:…...