【计算机视觉】对极几何

文章目录
- 一、极线约束(Epipolar Constraint)
- 二、相机标定过的情况
- 三、相机没有标定过的情况
- 四、八点算法(eight-point algorithm)
我的《计算机视觉》系列参考UC Berkeley的CS180课程,PPT可以在课程主页看到。
在上一篇文章3D视觉中我们介绍了在两个照相机像平面共面的情况下如何计算深度:深度与景物在图片中的位移成反比。这篇文章我们讨论更一般的情形,像平面不必共面,甚至不必平行。假设两个相机的内参(intrinsics)都是标定(calibrate)过的。
一、极线约束(Epipolar Constraint)
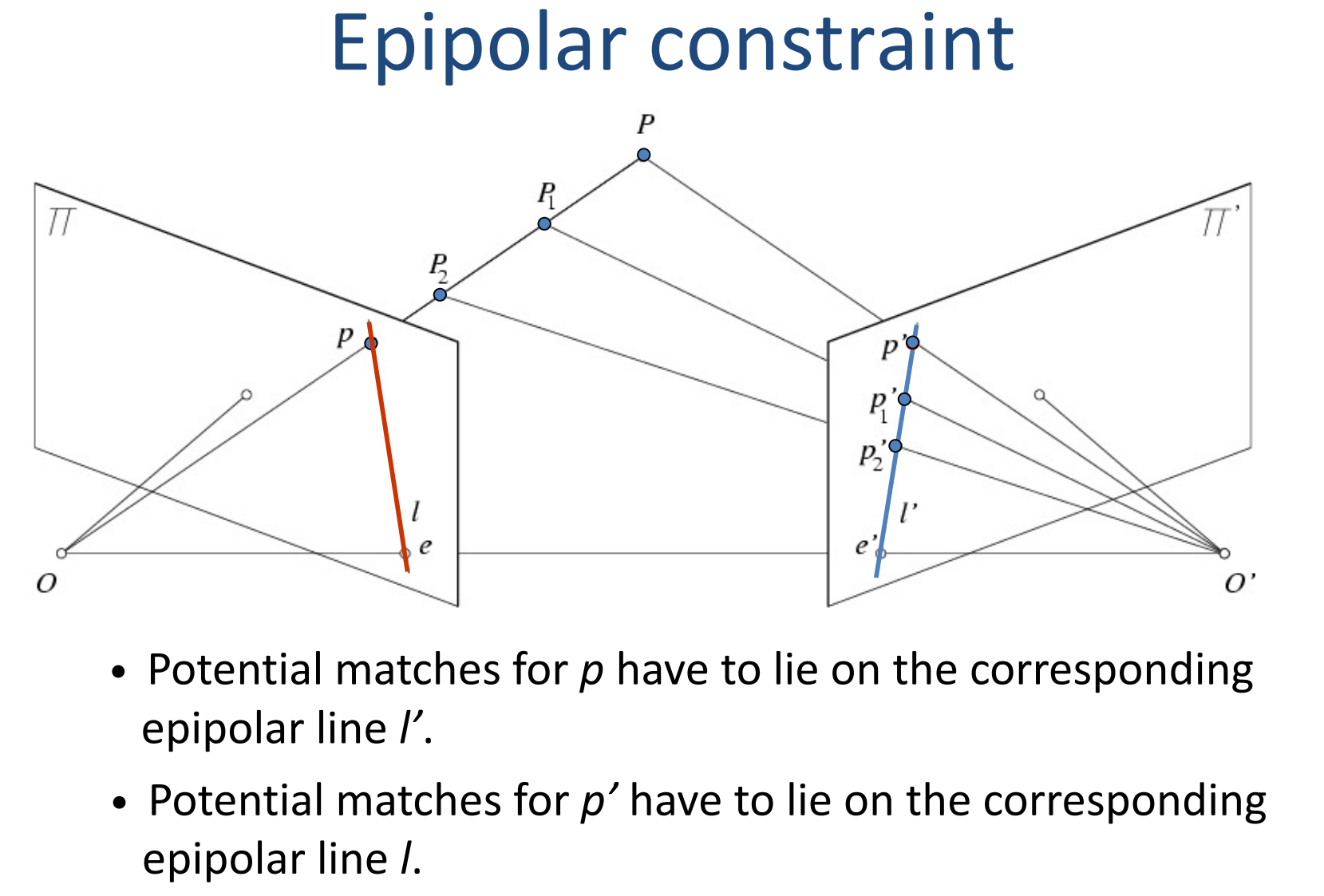
设两个相机的投影中心分别为 O O O和 O ′ O' O′(回想一下投影中心其实可以理解为所有光线都汇聚到的点),两个像平面分别为 Π \Pi Π和 Π ′ \Pi' Π′。设景物在 P P P点, O P OP OP与 Π \Pi Π交于点 p p p,这个 p p p就是景物在像平面 Π \Pi Π上的对应点。知道了 p p p在第一张照片上的坐标,就知道了景物所在的直线——图中的 O P OP OP。现在我们需要在第二张照片上找到景物对应的点。在哪儿找呢?上一篇文章我们讨论的情况中景物一定会出现在一条水平线上。在我们现在讨论的一般情况下,它还是出现在一条直线上吗?答案是肯定的。因为,任取 O P OP OP上的点 P 1 , P 2 , ⋯ P_1,P_2,\cdots P1,P2,⋯,令 O ′ P i O'P_i O′Pi与 Π ′ \Pi' Π′交于 p i ′ p_i' pi′, p i ′ p_i' pi′就是假设景物在 P i P_i Pi点时 其对应于第二张照片上的点。还是那个套路,我们知道 O P i OP_i OPi一定在 由 O P OP OP和 O O ′ OO' OO′确定的平面 O O ′ P OO'P OO′P上,那么 P i P_i Pi在第二张图片上的对应点 p i ′ p_i' pi′也一定在 平面 O O ′ P OO'P OO′P上;而 p ′ p' p′又在平面 Π ′ \Pi' Π′上,所以 p ′ p' p′一定在平面 Π ′ \Pi' Π′和平面 O O P ′ OOP' OOP′的交线上(图中的 l ′ l' l′)。所以,我们寻找 P P P在第二张图片上的对应点时只需要在直线 l ′ l' l′上寻找即可。直线 l l l和 l ′ l' l′称为极线(epipolar lines)。
但我们怎么知道极线 l ′ l' l′在哪里呢?两点确定一条直线,找到 l ′ l' l′上的两个点目前还有些困难,不过找到一个点是可以的。注意到, O O O点也在极线 O P OP OP上,而相机的内参是知道的,也就是说我们知道 O O O点的坐标(相对于 O ′ O' O′而言), O O ′ OO' OO′与 Π ′ \Pi' Π′的交点 e ′ e' e′一定在极线 l ′ l' l′上。 e ′ e' e′连同 O O ′ OO' OO′与 Π \Pi Π的交点 e e e被称为对极点(epipoles);其实就是一个相机看到另一个相机在图片中的位置,它不一定在图片上。当两个相机的像平面共面时,对极点 e e e和 e ′ e' e′就在无穷远处。 O O ′ OO' OO′称为摄影基线(baseline)。包含 O O ′ OO' OO′的所有平面称为极平面(epipolar plane),它绕着 O O ′ OO' OO′旋转;极平面和像平面的交点就是极线,它也绕着 O O ′ OO' OO′旋转。
二、相机标定过的情况
想要找到 l ′ l' l′上的另一个点其实是不可能的——没有另一个点可以找。但是,注意我们的相机是标定过的,我们知道两个相机之间的坐标变换。令点 p p p在第一个相机坐标系下的坐标为 x \boldsymbol{x} x,即 O P → = x \overrightarrow{OP}=\boldsymbol{x} OP=x,再令点 p ′ p' p′在第二个相机坐标系下的坐标为 x ′ \boldsymbol{x}' x′。现在我们在第二个相机坐标系(即 O ′ O' O′坐标系)下讨论问题。向量 x \boldsymbol{x} x就不能直接使用了,需要转换到 O ′ O' O′坐标系: x O = R x + t \boldsymbol{x}_O=R\boldsymbol{x}+\boldsymbol{t} xO=Rx+t,其中 R R R是旋转矩阵, t = O O ′ → \boldsymbol{t}=\overrightarrow{OO'} t=OO′是平移向量。我们还知道, x , x ′ , t \boldsymbol{x},\boldsymbol{x}',\boldsymbol{t} x,x′,t是共面的,即 x ′ ⋅ ( t × x O ) = 0 \boldsymbol{x}'\cdot(\boldsymbol{t}\times\boldsymbol{x}_O)=0 x′⋅(t×xO)=0其中 t × x \boldsymbol{t}\times\boldsymbol{x} t×x是极平面的法向量, x ′ \boldsymbol{x}' x′与其点积为 0 0 0说明与其垂直,进而说明 x ′ \boldsymbol{x}' x′在极平面上。化简: t × x O = t × ( R x + t ) = t × R x + x × t = t × R x + 0 = t × R x \boldsymbol{t}\times\boldsymbol{x}_O=\boldsymbol{t}\times (R\boldsymbol{x}+\boldsymbol{t})=\boldsymbol{t}\times R\boldsymbol{x}+\boldsymbol{x}\times \boldsymbol{t}=\boldsymbol{t}\times R\boldsymbol{x}+\boldsymbol{0}=\boldsymbol{t}\times R\boldsymbol{x} t×xO=t×(Rx+t)=t×Rx+x×t=t×Rx+0=t×Rx因此有 x ′ ⋅ ( t × R x ) = 0 \boldsymbol{x}'\cdot(\boldsymbol{t}\times R\boldsymbol{x})=0 x′⋅(t×Rx)=0叉乘可以转化成与一个反对称矩阵 [ t × ] [\boldsymbol{t}_\times] [t×]的乘法:
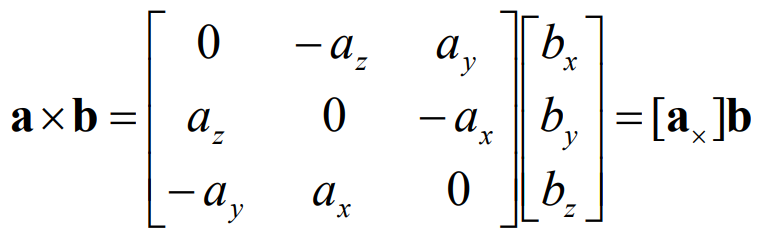
故等式化为 x ′ T [ t × ] R x = 0 \boldsymbol{x}'^T[\boldsymbol{t}_\times]R\boldsymbol{x}=0 x′T[t×]Rx=0。令 E = [ t × ] R E=[\boldsymbol{t}_\times]R E=[t×]R,则有 x ′ T E x = 0 \boldsymbol{x}'^TE\boldsymbol{x}=0 x′TEx=0这就是Longuet-Higgins方程。 E E E被称为本质矩阵(Essential Matrix)。
其实, E x E\boldsymbol{x} Ex就表示极线 l ′ l' l′。设 l ′ l' l′在像平面上的方程为 a x ′ + b y ′ + c = 0 ax'+by'+c=0 ax′+by′+c=0,即 [ a , b , c ] [ x ′ , y ′ , 1 ] T = 0 [a,b,c][x',y',1]^T=0 [a,b,c][x′,y′,1]T=0。注意像平面 Π ′ \Pi' Π′的法向量和 O ′ O' O′坐标系下的 z z z轴平行(即 Π ′ \Pi' Π′与 x ′ O y ′ x'Oy' x′Oy′面平行),所以 x ′ , y ′ x',y' x′,y′既是 O ′ O' O′坐标系下的横纵坐标,也是像平面坐标系下的横纵坐标。那么 a , b , c a,b,c a,b,c就可以用 E x E\boldsymbol{x} Ex来确定了。
最后, E E E是奇异矩阵,秩为 2 2 2,有五个自由度:3个平移,2个旋转(平面绕法线旋转等于没旋转,所以少一个旋转自由度)。
三、相机没有标定过的情况
设图像上的坐标为 ( u , v ) (u,v) (u,v),令 x ^ = [ u , v , 1 ] T \hat{\boldsymbol{x}}=[u,v,1]^T x^=[u,v,1]T。令 K K K和 K ′ K' K′分别是连哥哥相机的 3 × 3 3\times 3 3×3版本的内参矩阵(intrinsic matrix),则 x = K − 1 x ^ \boldsymbol{x}=K^{-1}\hat{\boldsymbol{x}} x=K−1x^, x ′ = K ′ − 1 x ^ ′ \boldsymbol{x}'=K'^{-1}\hat{\boldsymbol{x}}' x′=K′−1x^′,代入 x ′ T E x = 0 \boldsymbol{x}'^TE\boldsymbol{x}=0 x′TEx=0得 x ^ ′ T ( K ′ − 1 ) T E K − 1 ⏟ F x ^ = 0 \hat{\boldsymbol{x}}'^T\underset{F}{\underbrace{{(K'^{-1})}^TEK^{-1}}}\hat{\boldsymbol{x}}=0 x^′TF (K′−1)TEK−1x^=0其中 F = ( K ′ − 1 ) T E K − 1 F={(K'^{-1})}^TEK^{-1} F=(K′−1)TEK−1称为基础矩阵(Fundamental Matrix)。它也是秩为2的矩阵,有7个自由度:秩为2相当于多一个方程,损失一个自由度;把 F F F放大若干倍等式不变,再损失一个自由度。
四、八点算法(eight-point algorithm)
如何求得基础矩阵 F F F呢?还是老套路,线性回归。给定两张图片上的8个点对,代入方程 x ^ ′ T F x ^ = 0 \hat{\boldsymbol{x}}'^T F\hat{\boldsymbol{x}}=0 x^′TFx^=0用最小二乘法求得最优的 F F F即可。
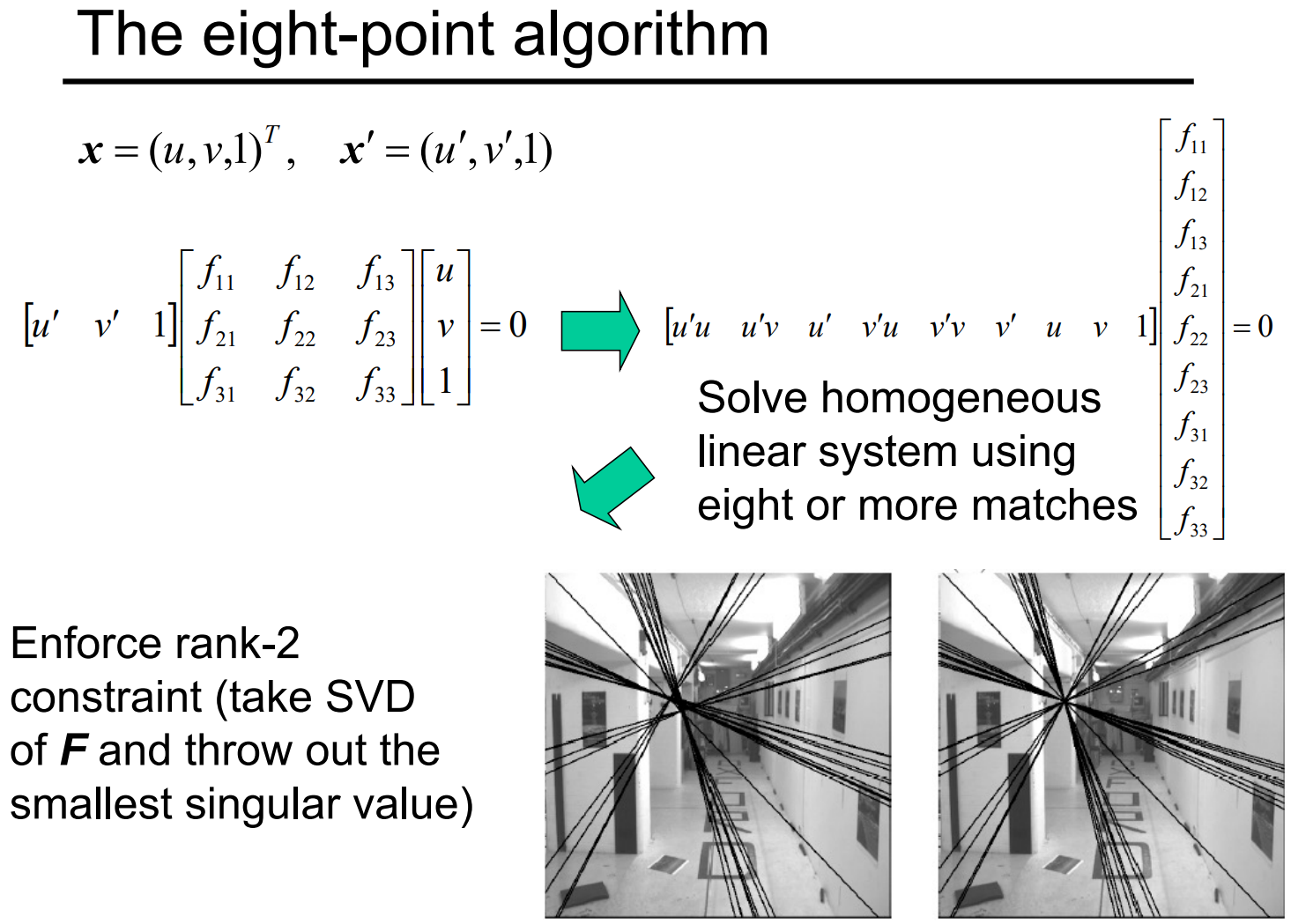
用 8 8 8个点是利用到了秩为 2 2 2的约束,少了一个自由度;另外一个缺失的自由度没必要利用,因为没必要手动确定 F F F的缩放大小。实践中应该用多于 8 8 8个点。
最后,如果我们标定了相机,那么就可以从 F F F求得 E E E;而 E E E又可以进行奇异值分解最终还原 R R R和 t \boldsymbol{t} t。过程比较复杂,可以参考https://inst.eecs.berkeley.edu/~ee290t/fa19/lectures/lecture10-3-decomposing-F-matrix-into-Rotation-and-Translation.pdf。
相关文章:
【计算机视觉】对极几何
文章目录 一、极线约束(Epipolar Constraint)二、相机标定过的情况三、相机没有标定过的情况四、八点算法(eight-point algorithm) 我的《计算机视觉》系列参考UC Berkeley的CS180课程,PPT可以在课程主页看到。 在上一…...
强大易于编辑的流程图组织图绘制工具draw.io Mac苹果中文版
draw.io可以绘制多种类型的图表,包括但不限于流程图、组织结构图、网络图、UML图、电气工程图等。draw.io提供了丰富的图形元素和编辑功能,使用户能够轻松地创建和编辑各种复杂的图表。同时,该软件还支持多种导出格式,方便用户在不…...
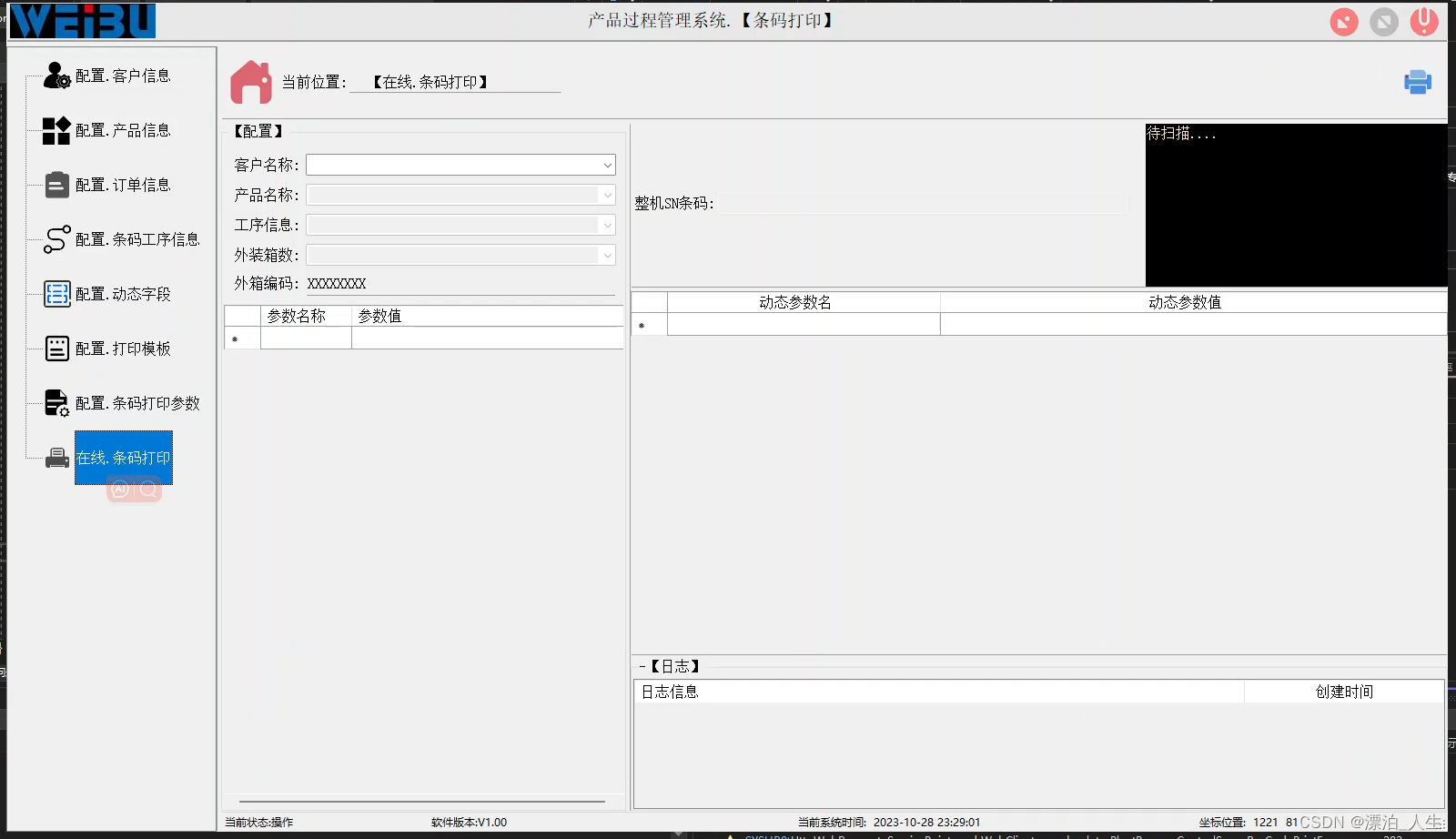
c# .net6 在线条码打印基于
条码打印基于:BarTender、ORM EF架构 UI展示: 主页代码: using NPOI.OpenXmlFormats.Spreadsheet; using ServerSide.Models; using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawi…...

Hive SQL的编译过程
1.MapReduce实现基本SQL操作的原理 详细讲解SQL编译为MapReduce之前,我们先来看看MapReduce框架实现SQL基本操作的原理 1.1 Join的实现原理 select u.name, o.orderid from order o join user u on o.uid = u.uid; 在map的输出value中为不同表的数据打上tag标记,在reduce阶段…...
[架构之路-245/创业之路-76]:目标系统 - 纵向分层 - 企业信息化的呈现形态:常见企业信息化软件系统 - 企业资源管理计划ERP
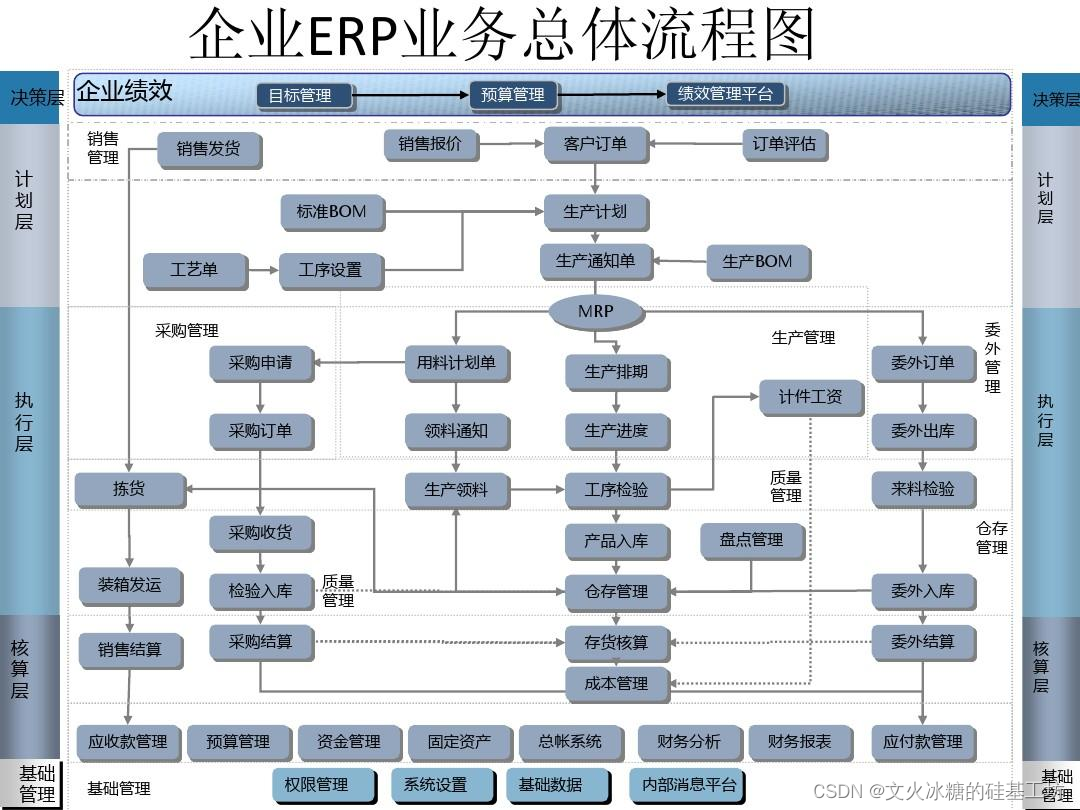
目录 前言: 一、企业信息化的结果:常见企业信息化软件 1.1 企业资源管理计划 1.1.1 什么是ERP:企业最常用的信息管理系统 1.1.2 ERP的演进过程 1.1.3 EPR模块 1.1.4 EPR五个层级 1.1.5 企业EPR业务总体流程图 1.1.6 什么类型的企业需…...
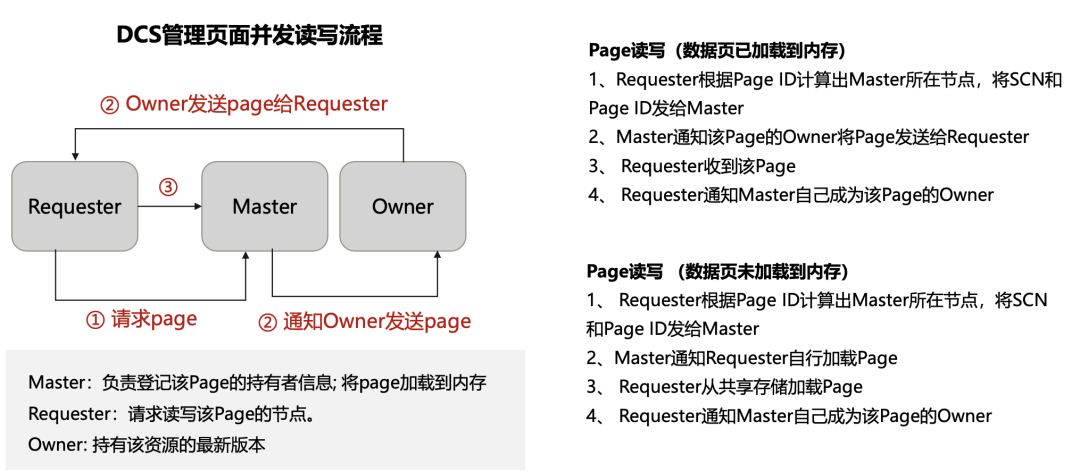
数据库简史:多主数据库架构的由来和华为参天引擎的机遇
注:本文发表后,收到了很多后台反馈,其中关于大型机的早期成就不容省略。微调重发本文,纯属个人观点,错谬之处,仍然期待指正。 2023年10月13日,在北京举办的“2023金融业数据库技术大会"上&…...
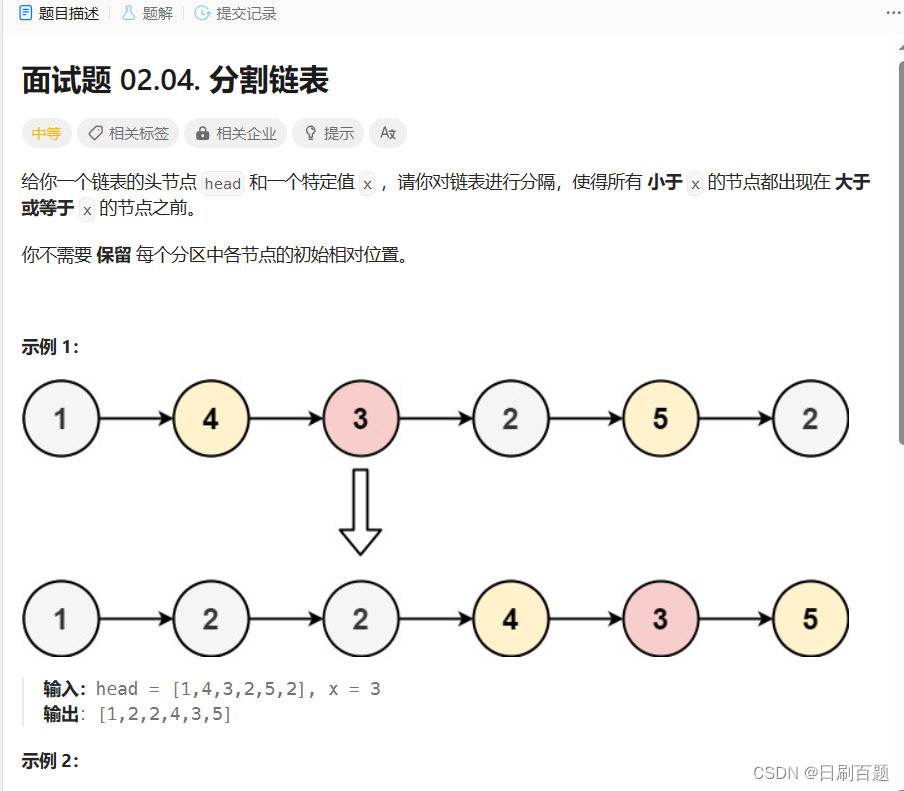
C语言每日一练(二)
单链表经典算法专题 一、 单链表相关经典算法OJ题1:移除链表元素 解法一:在原链表中删除Node.nextnext的节点 typedef struct ListNode ListNode; struct ListNode* removeElements( ListNode* head, int val) {ListNode* pcur head;ListNode* pre h…...
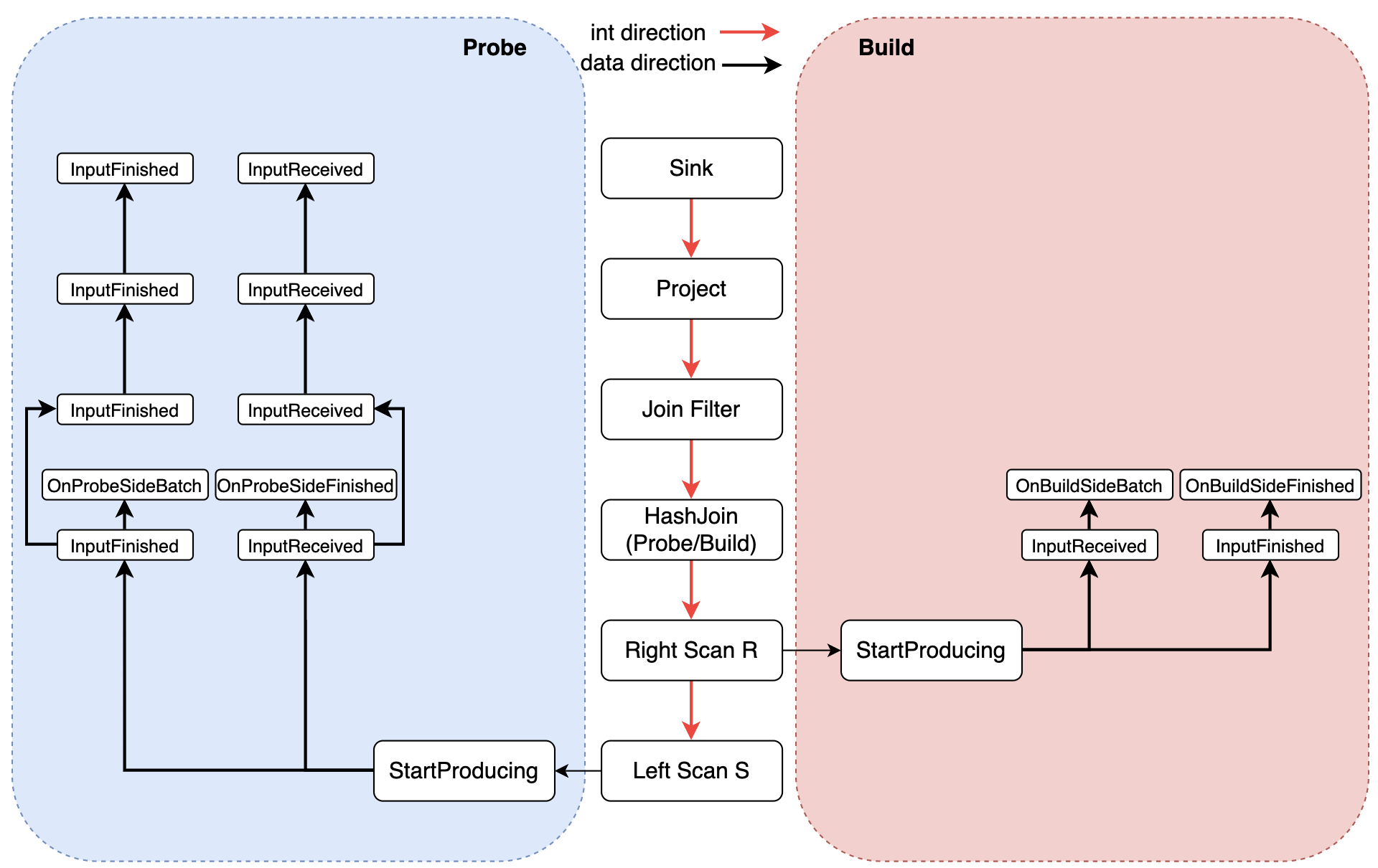
HashJoin 在 Apache Arrow 和PostgreSQL 中的实现
文章目录 背景PostgreSQL HashJoin实现PG 执行器架构HashJoin 基本流程HashJoin 实现细节Join 类型HashJoin 的划分阶段HashJoin 的分批处理阶段JOIN 类型的状态机转换HashJoin 的投影和过滤 Arrow Acero HashJoin实现Acero 基本框架HashJoin 基本流程 总结 背景 近两个月转到…...

FL Studio21.2.0.3421最新汉化破解版中文解锁下载完整版本
音乐在人们心中的地位日益增高,近几年音乐选秀的节目更是层出不穷,喜爱音乐,创作音乐的朋友们也是越来越多,音乐的类型有很多,好比古典,流行,摇滚等等。对新手友好程度基本上在首位,…...

docker在java项目中打成tar包
docker在java项目中打成tar包 1、首先安装一个docker desktop 2、mvn install项目后,建立一个自己的dockerfile 这里我以我的代码举例,from 镜像,这里你也能打包好一个镜像的基础上,from打好的镜像,这里我们用openj…...
No175.精选前端面试题,享受每天的挑战和学习
🤍 前端开发工程师(主业)、技术博主(副业)、已过CET6 🍨 阿珊和她的猫_CSDN个人主页 🕠 牛客高级专题作者、在牛客打造高质量专栏《前端面试必备》 🍚 蓝桥云课签约作者、已在蓝桥云课上架的前后端实战课程《Vue.js 和 Egg.js 开发企业级健康管理项目》、《带你从入…...

【网安AIGC专题10.19】论文6:Java漏洞自动修复+数据集 VJBench+大语言模型、APR技术+代码转换方法+LLM和DL-APR模型的挑战与机会
How Effective Are Neural Networks for Fixing Security Vulnerabilities 写在最前面摘要贡献发现 介绍背景:漏洞修复需求和Java漏洞修复方向动机方法贡献 数据集先前的数据集和Java漏洞Benchmark数据集扩展要求数据处理工作最终数据集 VJBenchVJBench 与 Vul4J 的…...

解决国外镜像无法访问导致的R包无法安装问题
我自己的方法: install.packages("vcd", repos "https://mirrors.tuna.tsinghua.edu.cn/CRAN/") R包安装镜像设置的三种方法:R包安装镜像设置的三种方法 - 简书 更新了Rstudio后,出现 unable to access index for rep…...
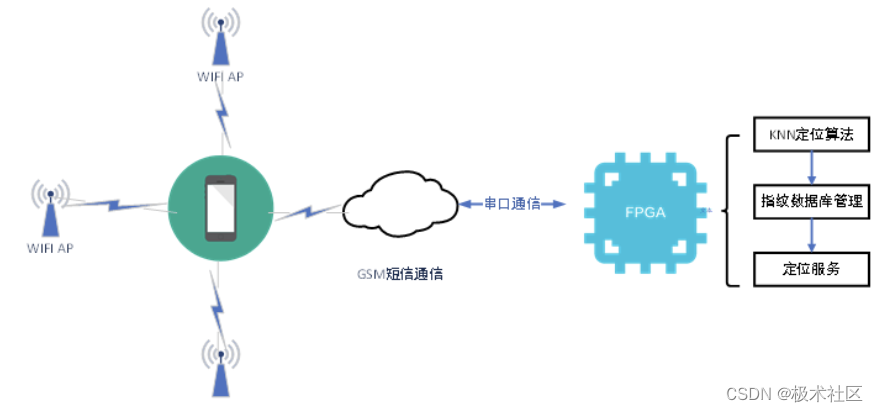
【2021集创赛】Robei杯一等奖:基于Robei EDA工具的隔离病房看护机器人设计
本作品参与极术社区组织的有奖征集|秀出你的集创赛作品风采,免费电子产品等你拿~活动。 团队介绍 参赛单位:重庆交通大学 队伍名称:一丘之貉 指导老师:毕波 李艾星 参赛队员:郁航 张坤 秦衡 总决赛奖项:Robei杯一等奖…...

Python之函数-传实参的两种方式
Python之函数-传实参的两种方式 函数参数 函数在定义是要定义好形式参数,调用时也提供足够的实际参数,一般来说,形参和实参个数要一致(可变参数除外)。实参传参方式 1、位置传参 定义时def f(x, y, z), 调用使用 f(1, 3, 5)&am…...

Hive客户端和Beeline命令行的基本使用
本专栏案例数据集链接: https://download.csdn.net/download/shangjg03/88478038 1.Hive CLI 1.1 命令帮助Help 使用 `hive -H` 或者 `hive --help` 命令可以查看所有命令的帮助,显示如下: usage: hive-d,--define <key=value> Variable subsitution to ap…...

Ubuntu 22.04自动登录进入桌面
1.编辑gdm3配置文件 sudo vim /etc/gdm3/custom.conf 2.修改内容为 AutomaticLoginEnableTrue AutomaticLoginusername 3.查看和重启服务 # 查看服务状态 systemctl --user status gnome-remote-desktop.service # 重启服务 systemctl --user restart gnome-remote-deskt…...
C#__简单了解XML文档
/* XML(可扩展标记语言):用于传输和存储数据 XML文档:树结构;包含根元素 XML元素:从开始标签到结束标签的部分 XML语法规则: 1、所有XML元素都必须有结束标签 …...

云游数智农业世界,体验北斗时空智能
今日,2023年中国国际农业机械展览会在武汉正式拉开帷幕,众多与会者云集,各类农机产品纷呈,盛况空前。 千寻位置作为国家北斗地基增强系统的建设与运营方,在中国国际农业机械展览会上亮相,以「北斗时空智能 …...

C# 递归算法使用简介_常用整理
一、递归简介 递归算法是一种直接或者间接调用自身函数或者方法的算法。 递归算法的实质是把问题分解成规模缩小的同类问题的子问题,然后递归调用方法来表示问题的解。递归算法对解决一大类问题很有效,它可以使算法简洁和易于理解。 递归本质是循环&a…...

关于nvm与node.js
1 安装nvm 安装过程中手动修改 nvm的安装路径, 以及修改 通过nvm安装node后正在使用的node的存放目录【这句话可能难以理解,但接着往下看你就了然了】 2 修改nvm中settings.txt文件配置 nvm安装成功后,通常在该文件中会出现以下配置&…...

论文浅尝 | 基于判别指令微调生成式大语言模型的知识图谱补全方法(ISWC2024)
笔记整理:刘治强,浙江大学硕士生,研究方向为知识图谱表示学习,大语言模型 论文链接:http://arxiv.org/abs/2407.16127 发表会议:ISWC 2024 1. 动机 传统的知识图谱补全(KGC)模型通过…...

(转)什么是DockerCompose?它有什么作用?
一、什么是DockerCompose? DockerCompose可以基于Compose文件帮我们快速的部署分布式应用,而无需手动一个个创建和运行容器。 Compose文件是一个文本文件,通过指令定义集群中的每个容器如何运行。 DockerCompose就是把DockerFile转换成指令去运行。 …...

MySQL用户和授权
开放MySQL白名单 可以通过iptables-save命令确认对应客户端ip是否可以访问MySQL服务: test: # iptables-save | grep 3306 -A mp_srv_whitelist -s 172.16.14.102/32 -p tcp -m tcp --dport 3306 -j ACCEPT -A mp_srv_whitelist -s 172.16.4.16/32 -p tcp -m tcp -…...
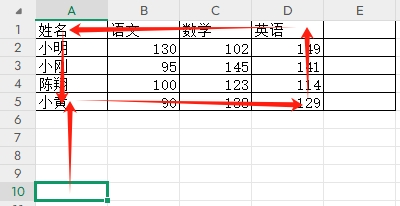
3-11单元格区域边界定位(End属性)学习笔记
返回一个Range 对象,只读。该对象代表包含源区域的区域上端下端左端右端的最后一个单元格。等同于按键 End 向上键(End(xlUp))、End向下键(End(xlDown))、End向左键(End(xlToLeft)End向右键(End(xlToRight)) 注意:它移动的位置必须是相连的有内容的单元格…...
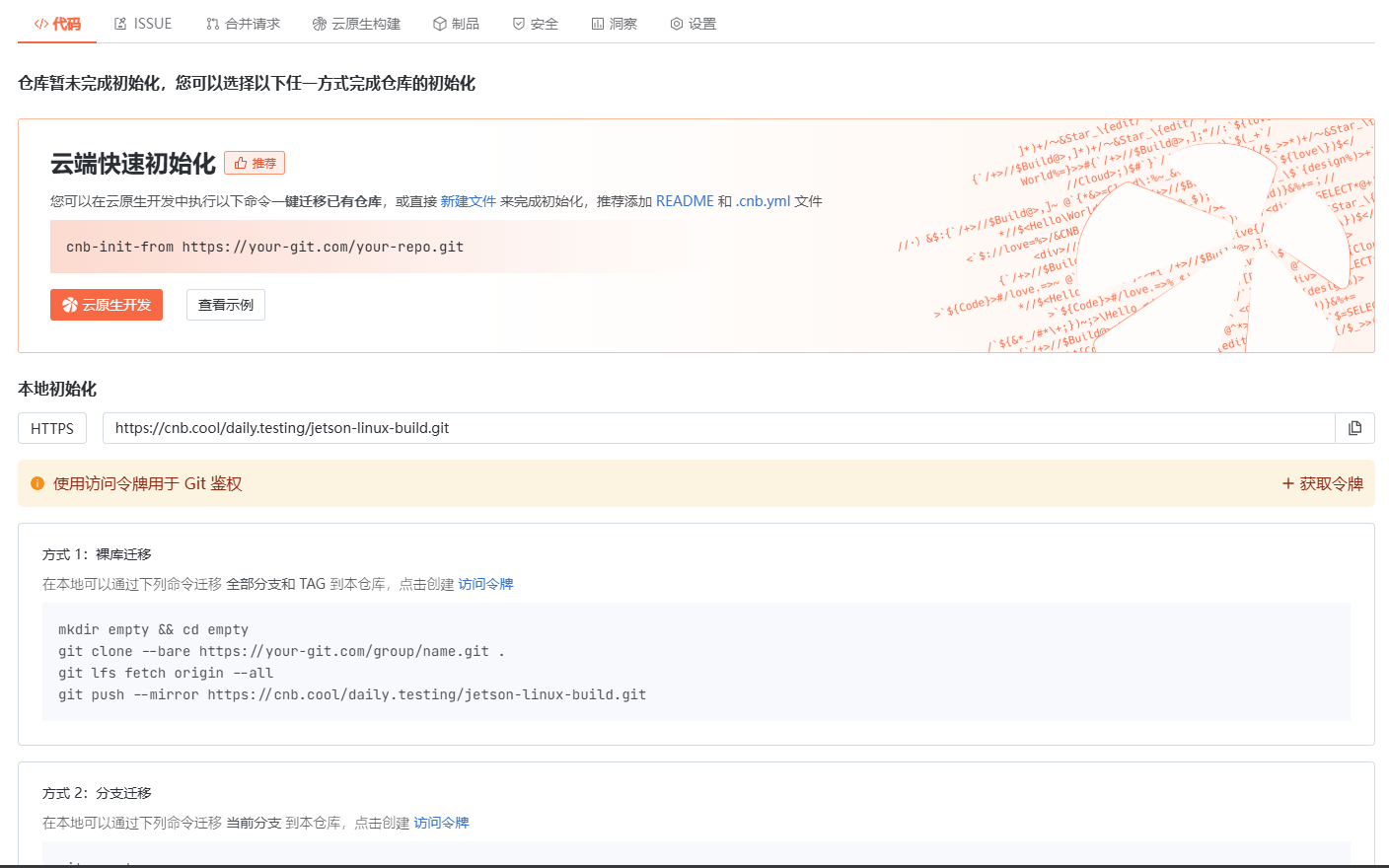
云原生玩法三问:构建自定义开发环境
云原生玩法三问:构建自定义开发环境 引言 临时运维一个古董项目,无文档,无环境,无交接人,俗称三无。 运行设备的环境老,本地环境版本高,ssh不过去。正好最近对 腾讯出品的云原生 cnb 感兴趣&…...
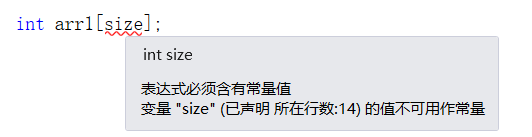
C++使用 new 来创建动态数组
问题: 不能使用变量定义数组大小 原因: 这是因为数组在内存中是连续存储的,编译器需要在编译阶段就确定数组的大小,以便正确地分配内存空间。如果允许使用变量来定义数组的大小,那么编译器就无法在编译时确定数组的大…...

【无标题】路径问题的革命性重构:基于二维拓扑收缩色动力学模型的零点隧穿理论
路径问题的革命性重构:基于二维拓扑收缩色动力学模型的零点隧穿理论 一、传统路径模型的根本缺陷 在经典正方形路径问题中(图1): mermaid graph LR A((A)) --- B((B)) B --- C((C)) C --- D((D)) D --- A A -.- C[无直接路径] B -…...

【Linux】Linux 系统默认的目录及作用说明
博主介绍:✌全网粉丝23W,CSDN博客专家、Java领域优质创作者,掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域✌ 技术范围:SpringBoot、SpringCloud、Vue、SSM、HTML、Nodejs、Python、MySQL、PostgreSQL、大数据、物…...
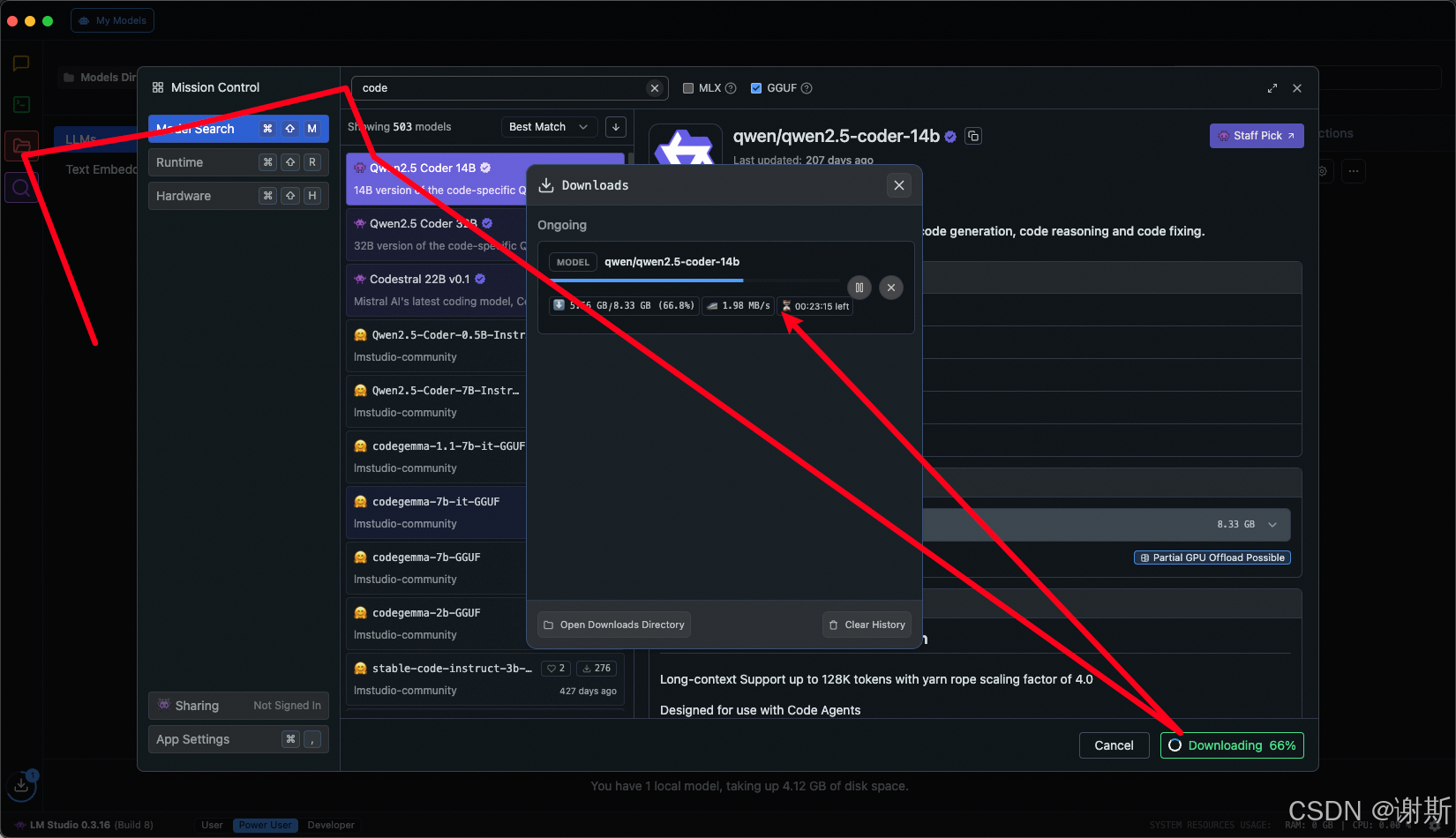
[大语言模型]在个人电脑上部署ollama 并进行管理,最后配置AI程序开发助手.
ollama官网: 下载 https://ollama.com/ 安装 查看可以使用的模型 https://ollama.com/search 例如 https://ollama.com/library/deepseek-r1/tags # deepseek-r1:7bollama pull deepseek-r1:7b改token数量为409622 16384 ollama命令说明 ollama serve #:…...