嵌入式 STM32 红外遥控
目录
红外遥控
NEC码的位定义
硬件设计
软件设计
源码程序
红外遥控
红外遥控是一种无线、非接触控制技术,具有抗干扰能力强,信息传输可靠,功耗低,成本低,容易实现等显著的特点,被诸多电子设备特别是家用电器广泛采用,并越来越多的应用到计算机系统上面。
由于红外线遥控不具有像无线电遥控那样穿过障碍物去控制被控对象的能力,所以,在设计红外线遥控器的时候,不必要像无线电遥控器那样,每一套(发射器和接收器)要有不同的遥控频率或编码(否则,就会隔墙控制或干扰另据的家用电器),
所以同类产品的红外线遥控器,可以有相同的遥控频率或编码,而不会出现遥控信号“串门”的情况。这对于大批量生产以及在家用电器上普及红外线遥控提供了极大的方面。由于红外线为不可见光,因此对环境影响很小,再由红外光波动波长远小于无线电波的波长,所以红外线遥控不会影响其他家用电器,也不会影响临近的无线电设备。
红外遥控的编码方式目前广泛使用的是: PWM(脉冲宽度调制)的 NEC 协议和 Philips PPM(脉冲位置调制) 的 RC-5 协议的。 遥控器使用的是NEC 协议,其特征如下:
- 8 位地址和 8 位指令长度;
- 地址和命令 2 次传输(确保可靠性)
- PWM 脉冲位置调制,以发射红外载波的占空比代表“0”和“1”;
- 载波频率为 38Khz;
- 位时间为 1.125ms 或 2.25ms;
RGB超薄遥控器,1-32键遥控器,用于USB卡小音响遥控器/车载MP3遥控器/足浴器遥控器/灯具遥控器/数码相框遥控器/单片机遥控器/开发板遥控器等。详细参数如下:
- 尺寸:84.5*56.5*6.0mm。
- 产品内含1个CR2025纽扣电池。
- 有效角度:60度。
- 面贴材料:0.125mmPET,有效寿命2万次 。
- 含CR2025纽扣电池,有绝缘片(以免不用时耗电)。

NEC码的位定义
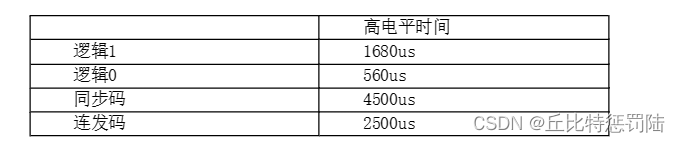
一个脉冲对应 560us 的连续载波,一个逻辑 1 传输需要 2.25ms(560us 高+1680us 低),一个逻辑 0 的传输需要 1.125ms(560us 高+560us 低)。而红外接收头在收到脉冲的时候为低电平,在没有脉冲的时候为高电平,这样,我们在接收头端收到的信号为:逻辑 1 应该是 560us 低+1680us 高,逻辑 0 应该是 560us 低+560us 高(接受头接受到的电平值取反)。
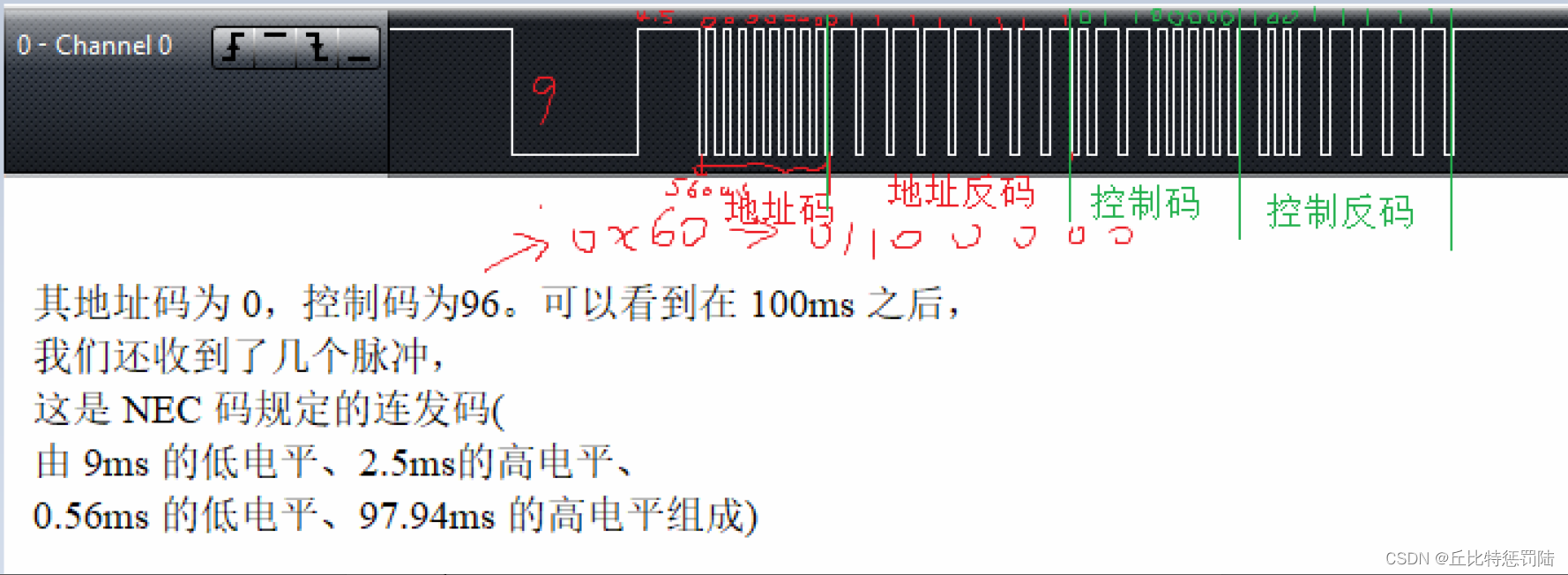
NEC 遥控指令的数据格式为:同步码头(引导码/起始码)、地址码(遥控ID)、地址反码、控制码(键值)、控制反码。同步码由一个 9ms 的低电平和一个 4.5ms 的高电平组成,地址码、地址反码、控制码、控制反码均是8 位数据格式。按照低位在前,高位在后的顺序发送。采用反码是为了增加传输的可靠性(可用于校验)。
我们遥控器的按键“OFF”按下时,从红外接收头端收到的波形如下图所示:

从上图中可以看到,其地址码为 0(一个周期看,低电平时间为560us,高电平时间为560us,表示逻辑0..),控制码为96。可以看到在 100ms 之后,我们还收到了几个脉冲,这是 NEC 码规定的连发码(由 9ms 的低电平、2.5ms的高电平、0.56ms 的低电平、97.94ms 的高电平组成),如果在一帧数据发送完毕之后,按键仍然没有放开,则发射重复码,即连发码,可以通过统计连发码的次数来标记按键按下的长短/次数。
硬件设计
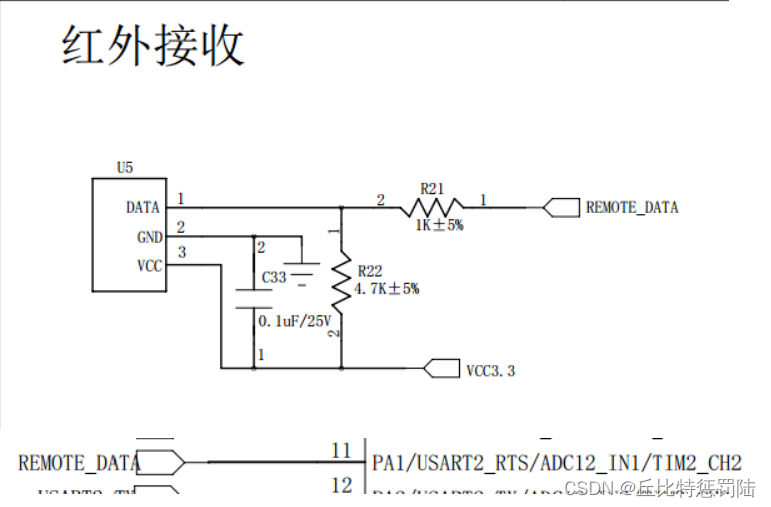
PA8--复用功能
采用TIM1_CH1输入捕获功能,通过波形的捕获得到当前的地址码+地址反码+控制码+控制反码(32位)
软件设计
当接收到同步码头就知道有按键被按下
开始接收地址码+地址反码+控制反码
重点是通过捕获一段的脉冲的高电平时间来区分是逻辑1还是逻辑0还是同步码还是连发码
源码程序
#include "remote.h"
#include "delay.h"
#include "usart.h"//红外遥控初始化
//设置IO以及定时器4的输入捕获
void Remote_Init(void)
{ GPIO_InitTypeDef GPIO_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_ICInitTypeDef TIM_ICInitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //使能PORTB时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE); //TIM4 时钟使能 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PB9 输入 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //上拉输入 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);GPIO_SetBits(GPIOB,GPIO_Pin_9); //初始化GPIOB.9TIM_TimeBaseStructure.TIM_Period = 10000; //设定计数器自动重装值 最大10ms溢出 TIM_TimeBaseStructure.TIM_Prescaler =(72-1); //预分频器,1M的计数频率,1us加1. TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMxTIM_ICInitStructure.TIM_Channel = TIM_Channel_4; // 选择输入端 IC4映射到TI4上TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频 TIM_ICInitStructure.TIM_ICFilter = 0x03;//IC4F=0011 配置输入滤波器 8个定时器时钟周期滤波TIM_ICInit(TIM4, &TIM_ICInitStructure);//初始化定时器输入捕获通道TIM_Cmd(TIM4,ENABLE ); //使能定时器4NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn; //TIM3中断NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //先占优先级0级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器 TIM_ITConfig( TIM4,TIM_IT_Update|TIM_IT_CC4,ENABLE);//允许更新中断 ,允许CC4IE捕获中断
}//遥控器接收状态
//[7]:收到了引导码标志
//[6]:得到了一个按键的所有信息
//[5]:保留
//[4]:标记上升沿是否已经被捕获
//[3:0]:溢出计时器
u8 RmtSta=0;
u16 Dval; //下降沿时计数器的值
u32 RmtRec=0; //红外接收到的数据
u8 RmtCnt=0; //按键按下的次数
//定时器4中断服务程序
void TIM4_IRQHandler(void)
{ if(TIM_GetITStatus(TIM4,TIM_IT_Update)!=RESET){if(RmtSta&0x80) //上次有数据被接收到了{ RmtSta&=~0X10; //取消上升沿已经被捕获标记if((RmtSta&0X0F)==0X00)RmtSta|=1<<6; //标记已经完成一次按键的键值信息采集if((RmtSta&0X0F)<14)RmtSta++;else{RmtSta&=~(1<<7); //清空引导标识RmtSta&=0XF0; //清空计数器 } } }if(TIM_GetITStatus(TIM4,TIM_IT_CC4)!=RESET){ if(RDATA)//上升沿捕获{TIM_OC4PolarityConfig(TIM4,TIM_ICPolarity_Falling); //CC4P=1 设置为下降沿捕获TIM_SetCounter(TIM4,0); //清空定时器值RmtSta|=0X10; //标记上升沿已经被捕获}else //下降沿捕获{Dval=TIM_GetCapture4(TIM4); //读取CCR4也可以清CC4IF标志位TIM_OC4PolarityConfig(TIM4,TIM_ICPolarity_Rising); //CC4P=0 设置为上升沿捕获if(RmtSta&0X10) //完成一次高电平捕获 {if(RmtSta&0X80)//接收到了引导码{if(Dval>300&&Dval<800) //560为标准值,560us{RmtRec<<=1; //左移一位.RmtRec|=0; //接收到0 }else if(Dval>1400&&Dval<1800) //1680为标准值,1680us{RmtRec<<=1; //左移一位.RmtRec|=1; //接收到1}else if(Dval>2200&&Dval<2600) //得到按键键值增加的信息 2500为标准值2.5ms{RmtCnt++; //按键次数增加1次RmtSta&=0XF0; //清空计时器 }}else if(Dval>4200&&Dval<4700) //4500为标准值4.5ms{RmtSta|=1<<7; //标记成功接收到了引导码RmtCnt=0; //清除按键次数计数器} }RmtSta&=~(1<<4);} }TIM_ClearITPendingBit(TIM4,TIM_IT_Update|TIM_IT_CC4);
}//处理红外键盘
//返回值:
// 0,没有任何按键按下
//其他,按下的按键键值.
u8 Remote_Scan(void)
{ u8 sta=0; u8 t1,t2; if(RmtSta&(1<<6))//得到一个按键的所有信息了{ t1=RmtRec>>24; //得到地址码t2=(RmtRec>>16)&0xff; //得到地址反码 if((t1==(u8)~t2)&&t1==REMOTE_ID)//检验遥控识别码(ID)及地址 { t1=RmtRec>>8;t2=RmtRec; if(t1==(u8)~t2)sta=t1;//键值正确 } if((sta==0)||((RmtSta&0X80)==0))//按键数据错误/遥控已经没有按下了{RmtSta&=~(1<<6);//清除接收到有效按键标识RmtCnt=0; //清除按键次数计数器}} return sta;
}相关文章:
嵌入式 STM32 红外遥控
目录 红外遥控 NEC码的位定义 硬件设计 软件设计 源码程序 红外遥控 红外遥控是一种无线、非接触控制技术,具有抗干扰能力强,信息传输可靠,功耗低,成本低,容易实现等显著的特点,被诸多电子设备特别…...
【java web篇】使用JDBC操作数据库
📋 个人简介 💖 作者简介:大家好,我是阿牛,全栈领域优质创作者。😜📝 个人主页:馆主阿牛🔥🎉 支持我:点赞👍收藏⭐️留言Ὅ…...

华为OD机试题,用 Java 解【最小步骤数】问题
最近更新的博客 华为OD机试题,用 Java 解【停车场车辆统计】问题华为OD机试题,用 Java 解【字符串变换最小字符串】问题华为OD机试题,用 Java 解【计算最大乘积】问题华为OD机试题,用 Java 解【DNA 序列】问题华为OD机试 - 组成最大数(Java) | 机试题算法思路 【2023】使…...

JAVA中 throw 和 throws 的区别含案例
JAVA中 throw 和 throws 的区别含案例 在 Java 中,throw 和 throws 是两个关键字,它们用于处理异常。 throw 关键字用于抛出一个异常对象。一旦抛出异常,程序将停止执行当前方法的剩余代码,并尝试寻找与该异常匹配的 catch 块来…...

基于SpringCloud的可靠消息最终一致性05:保存并发送事务消息
在有了分布式事务的解决方案、项目的需求、骨架代码和基础代码,做好了所有的准备工作之后,接下来就可以继续深入了解「核心业务」了。 在前面了解分布式事务时,可靠消息最终一致性方案的流程图是这样的: 图三十一:可靠消息最终一致性 整个的流程是: 1、业务处理服务在事务…...

SQL语句大全(详解)
SQL前言1 DDL1.1 显示所包含的数据库1.2 创建数据库1.3 删除数据库1.4 使用数据库1.4.1 创建表1.4.2 查看表的结构1.4.3 查看当前数据库下的所有表1.4.4 基础的增删改查1.4.4.1 删除表1.4.4.2 添加列1.4.4.3 修改表名1.4.4.4 修改数据类型1.4.4.5 修改列名和数据类型2 DML2.1 给…...

视频营销活动中7个常见的错误
如今,越来越多的企业在社交媒体平台上开展视频营销活动。与其他传统营销策略不同,视频营销可以为企业带来更多的销售机会。随着越来越多的视频社交媒体平台的出现,营销人员更应该抓住这个机会。但在开始视频创作之前,您需要有一个…...

MapReduce小试牛刀
部署完hadoop单机版后,试下mapreduce是怎么分析处理数据的 Word Count Word Count 就是"词语统计",这是 MapReduce 工作程序中最经典的一种。它的主要任务是对一个文本文件中的词语作归纳统计,统计出每个出现过的词语一共出现的次…...

2023年全国最新工会考试精选真题及答案7
百分百题库提供工会考试试题、工会考试预测题、工会考试真题、工会证考试题库等,提供在线做题刷题,在线模拟考试,助你考试轻松过关。 21.会员大会或会员代表大会与职工代表大会或职工大会须分别行使职权,()…...
13-mvc框架原理与实现方式
1、mvc原理 # mvc 与框架## 1.mvc 是什么1. m:model,模型(即数据来源),主要是针对数据库操作 2. v:view,视图,html 页面。视图由一个一个模板构成(模板是视图的一个具体展现或载体,视图是模板的一个抽象) 3. c:controller,控制器,用于mv之间的数据交互## 2.最简单的 mvc 就是一…...
弹性盒子布局
目录一、弹性盒子属性二、认识flex的坐标轴三、简单学习父级盒子属性三、属性说明3.1、flex-grow一、弹性盒子属性 说明: div的默认样式:display:block 块盒子 display:flex弹性盒子(可以控制下级盒子的位置) 当两种盒子单独出现…...
C# Sqlite数据库加密
sqlite官方的数据库加密是收费的,而且比较贵。 幸亏微软提供了一种免费的方法。 1 sqlite加密demo 这里我做了一个小的demo演示如下: 在界面中拖入数据库名、密码、以及保存的路径 比如我选择保存路径桌面的sqlite目录,数据库名guigutool…...
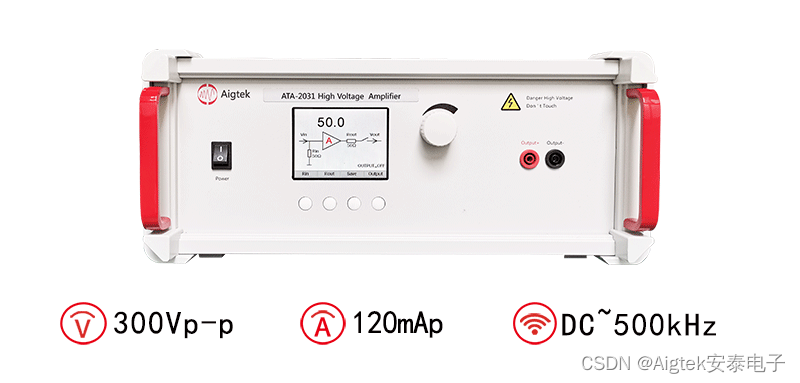
高压放大器在声波谐振电小天线收发测试系统中的应用
实验名称:高压放大器在声波谐振电小天线收发测试系统中的应用研究方向:信号传输测试目的:声波谐振电小天线颠覆了传统电小天线以电磁波谐振作为理论基础的天线发射和接收模式,它借助声波谐振实现电磁信号的辐射或接收。因为同频的…...
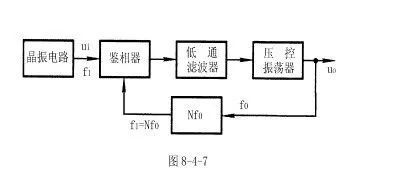
锁相环的组成和原理及应用
一.锁相环的基本组成 许多电子设备要正常工作,通常需要外部的输入信号与内部的振荡信号同步,利用锁相环路就可以实现这个目的。 锁相环路是一种反馈控制电路,简称锁相环(PLL)。锁相环的特点是:利用外部输入的参考信号控制环路内…...

[C++]string类模拟实现
目录 前言: 1. string框架构造 2. 默认函数 2.1 构造函数 2.2 析构函数 2.3 拷贝构造 2.4 赋值重载 3. 迭代器 4. 整体程序 前言: 本篇文章模拟实现了C中string的部分功能,有助于大家了解和熟悉string类,虽然这个类不难实…...

一个更适合Java初学者的轻量级开发工具:BlueJ
Java是世界上最流行的编程语言之一,它被广泛用于从Web开发到移动应用的各种应用程序。大部分Java工程师主要是用IDEA、Eclipse为主,这两个开发工具由于有强大的能力,所以复杂度上就更高一些。如果您刚刚开始使用Java,或者您更适合…...

从程序员到项目组长,要经历六重修炼
最近和粉丝朋友们交流时发现,有很多刚刚开始做项目组长的朋友自我认可度非常低,感觉做组长之后天天打杂,技术也荒废了。领导天天找你要成果,下属天天找你说困难,你在中间受领导和下属的夹板气。时间久了,你…...
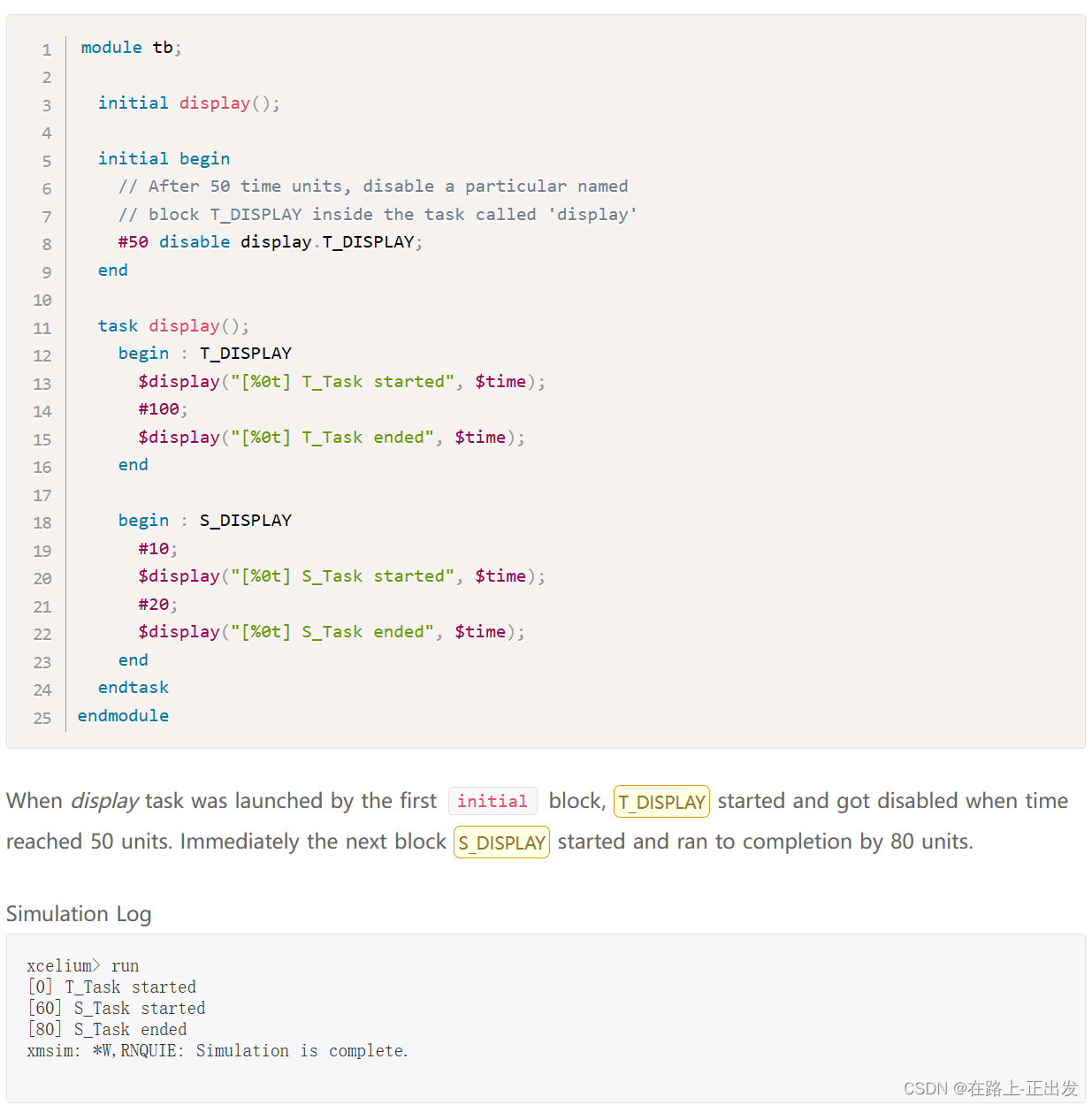
我的 System Verilog 学习记录(5)
、 引言 本文简单介绍 System Verilog 语言的 控制流。 前文链接: 我的 System Verilog 学习记录(1) 我的 System Verilog 学习记录(2) 我的 System Verilog 学习记录(3) 我的 System Ver…...

多芯片设计 Designing For Multiple Die
Why a system-level approach is essential, and why its so challenging作者:Ann MutschlerAnn Mutschler is executive editor at Semiconductor Engineering.将多个裸片或芯粒集成到一个封装中,与将它们放在同一硅片上有着很大的区别。在同一硅片上&a…...

2022年全国职业院校技能大赛(中职组)网络安全竞赛试题A(10)
目录 竞赛内容 模块A 基础设施设置与安全加固 一、项目和任务描述: 二、服务器环境说明 三、具体任务(每个任务得分以电子答题卡为准) A-1任务一 登录安全加固(Windows, Linux) 1.密码策略(Windows, …...

OpenClaw多模型切换:GLM-4.7-Flash与Qwen混合使用指南
OpenClaw多模型切换:GLM-4.7-Flash与Qwen混合使用指南 1. 为什么需要多模型切换? 去年我在尝试用OpenClaw自动化处理技术文档时,发现单一模型很难满足所有需求。有些任务需要快速响应(如简单问答),有些则…...

打造高性价比DIY回音壁:从零开始的多媒体音箱制作指南
1. 为什么选择DIY回音壁? 每次看到商场里标价上万元的回音壁音箱,我都会想:这东西真的值这个价吗?作为一个玩了十几年音响的发烧友,我决定用不到500元的预算,打造一套属于自己的高性价比回音壁。你可能不知…...

IE浏览器已成过去式?Win10用户必看的IE性能优化与安全设置
IE浏览器性能优化与安全设置指南:告别卡顿与劫持困扰 微软宣布放弃IE浏览器已经过去多年,但这款"古董级"浏览器依然顽固地存在于我们的Windows系统中。对于许多企业用户和特定行业从业者来说,完全卸载IE并非可行选项——某些老旧的…...
UE5 Pixel Streaming配置HTTPS全流程:从证书申请到成功运行(避坑指南)
UE5 Pixel Streaming HTTPS配置实战:从零搭建到安全部署的完整指南 在虚幻引擎5(UE5)的实时交互应用开发中,Pixel Streaming技术正成为连接3D内容与终端用户的重要桥梁。而HTTPS协议的配置,则是确保数据传输安全性的关…...

为机械臂视觉抓取做准备:在Ubuntu 18.04上配置ROS+YOLOv5运行环境的完整避坑清单
为机械臂视觉抓取做准备:在Ubuntu 18.04上配置ROSYOLOv5运行环境的完整避坑清单 当机械臂遇上YOLOv5,视觉抓取的能力边界将被重新定义。但在这之前,开发者需要跨越环境配置的"死亡之谷"——特别是当Ubuntu 18.04、ROS Melodic和PyT…...

从Demo到生产级:免费开源Agentic RAG实战课程,手把手教你构建智能系统!
Production Agentic RAG Course是一个免费开源课程,旨在帮助开发者从零构建生产级Agentic RAG系统。课程分为5个模块,共17节课,涵盖架构设计、工具集成、性能优化和生产部署等关键内容。Agentic RAG通过引入Agent能力,实现主动规划…...

DDPG与TD3算法训练中tanh饱和区导致的边界值问题分析与调优
1. 为什么DDPG/TD3会卡在动作边界值? 第一次用DDPG训练机械臂控制任务时,我盯着监控曲线看了整整三天——那个该死的关节角度永远卡在30度的极限位置。后来换成TD3算法,发现同样会陷入这个怪圈。这就像新手司机开车总把方向盘打死,…...

多模态融合新思路:POE在图像与文本数据融合中的5个实战案例
多模态融合新思路:POE在图像与文本数据融合中的5个实战案例 当图像遇见文字,机器如何像人类一样理解两者之间的微妙联系?这正是多模态学习试图解决的核心问题。在医疗影像分析、自动驾驶、智能客服等场景中,单一模态的数据往往存在…...

Avalonia11 Canvas拖拽与动态渲染保姆级教程:从MVVM绑定到事件处理完整流程
Avalonia11 Canvas拖拽与动态渲染实战:构建高性能迷你地图导航系统 在复杂的图形界面应用中,迷你地图导航已经成为提升用户体验的标准配置。想象一下,当你在处理一张超大的设计图纸或地图时,如何快速定位到感兴趣的局部区域&#…...

OpenClaw多模态探索:百川2-13B+OCR实现图片信息自动化处理
OpenClaw多模态探索:百川2-13BOCR实现图片信息自动化处理 1. 为什么需要图片信息自动化处理 上周我收到一份电子合同,需要从中提取关键条款进行汇总。手动翻查30多页PDF时,突然想到:既然OpenClaw能操控电脑,为什么不…...