MATLAB 机械臂逆运动学进行轨迹控制建模
系列文章目录
文章目录
- 系列文章目录
- 前言
- 一、模型概览
- 1.1 Target Pose Generation 目标姿势生成
- 1.2 Inverse Kinematics 逆运动学
- 1.3 Manipulator Dynamics 机械手动力学
- 1.4 Pose Measurement 姿势测量
- 二、机械手定义
- 三、生成航点
- 四、模型设置
- 五、模拟机械手运动
- 六、将结果可视化
前言
本 Simulink 示例演示了逆运动学块如何驱动机械手沿指定轨迹运动。所需的轨迹被指定为机械手末端效应器的一系列紧密间隔姿势。轨迹生成和航点定义代表了许多机器人应用,如拾取和放置操作、根据空间加速度和速度曲线计算轨迹,甚至利用摄像头和计算机视觉模拟外部对关键帧的观察。轨迹生成后,逆运动学模块可将其转换为关节空间轨迹,然后用于模拟机械手和控制器的动态。
一、模型概览
加载模型,看看它是如何构建的
open_system('IKTrajectoryControlExample.slx');
该模型由四个主要操作组成:
-
Target Pose Generation 目标姿势生成
-
Inverse Kinematics 逆运动学
-
Manipulator Dynamics 机械手动力学
-
Pose Measurement 姿势测量
1.1 Target Pose Generation 目标姿势生成
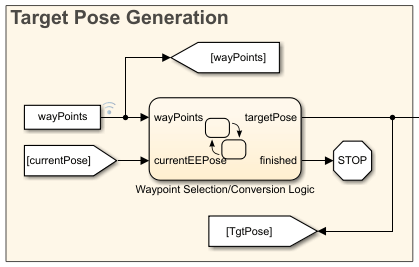
该状态流程图选择哪个航点作为操纵器的当前目标。一旦操纵器到达当前目标的容差范围内,图表就会将目标调整到下一个航点。该图表还通过 eul2tform 函数将航点的各组成部分转换并组合成一个同质变换。一旦没有更多的航点可选,图表就会终止模拟。
1.2 Inverse Kinematics 逆运动学
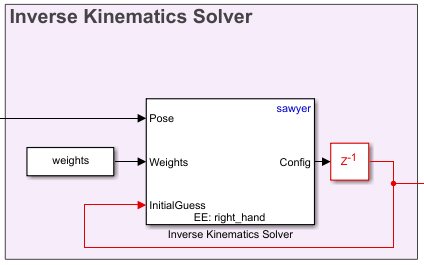
逆运动学通过计算一组关节角度,为末端效应器生成所需的姿态。使用带有刚体树模型的逆运动学,并将末端效应器的目标姿态指定为同质变换。为解决方案位置和方向的相对公差约束指定一系列权重,并给出关节位置的初始估计值。该程序块会输出一个关节位置矢量,根据程序块参数中指定的刚体树模型生成所需的姿势。为确保解决方案的平滑连续性,求解器将使用上一个配置解决方案作为起始位置。如果目标姿态在上一个模拟时间步之后没有更新,这也会减少计算的冗余。
1.3 Manipulator Dynamics 机械手动力学
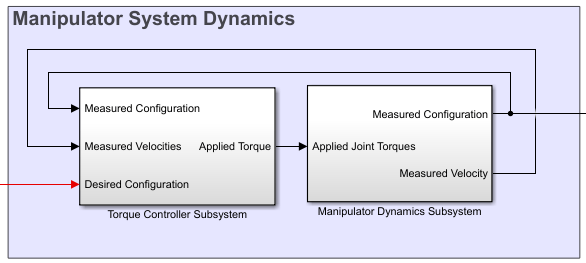
机械手动力学由两部分组成,一部分是用于产生扭矩信号的控制器,另一部分是用于模拟这些扭矩信号的机械手动力学模型。示例中的控制器使用通过机械手的反动力学计算得出的前馈组件和反馈 PD 控制器来修正误差。机械手的模型使用前向动力学模块,该模块与刚体树对象协同工作。如需更复杂的动力学和可视化技术,可考虑使用控制系统工具箱™ 块组和 Simscape Multibody™ 中的工具来替代前向动力学块。
1.4 Pose Measurement 姿势测量

姿态测量从机械手模型中获取关节角度读数,并将其转换为同质变换矩阵,作为航点选择部分的反馈信息。
二、机械手定义
本示例使用的机械手是 Rethink Sawyer™ 机器人机械手。描述机械手的刚体树(rigidBodyTree)对象是使用 importrobot 从 URDF(统一机器人描述格式)文件导入的。
% Import the manipulator as a rigidBodyTree Object
sawyer = importrobot('sawyer.urdf');
sawyer.DataFormat = 'column';% Define end-effector body name
eeName = 'right_hand';% Define the number of joints in the manipulator
numJoints = 8;% Visualize the manipulator
show(sawyer);
xlim([-1.00 1.00])
ylim([-1.00 1.00]);
zlim([-1.02 0.98]);
view([128.88 10.45]);
三、生成航点
在本例中,操纵器的目标是追踪出在图片 coins.png 中检测到的硬币的边界。首先,对图像进行处理,找出硬币的边界。
I = imread('coins.png');
bwBoundaries = imread('coinBoundaries.png');figure
subplot(1,2,1)
imshow(I,'Border','tight')
title('Original Image')subplot(1,2,2)
imshow(bwBoundaries,'Border','tight')
title('Processed Image with Boundary Detection')
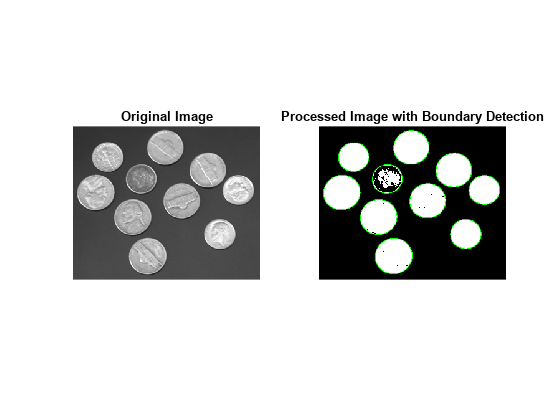
经过图像处理后,硬币的边缘被提取为像素位置。边界是一个单元格数组,每个单元格包含一个数组,描述单个检测边界的像素坐标。关于如何生成这些数据的更全面信息,请参阅示例 “图像中的边界追踪”(需要使用图像处理工具箱)。
load boundaryData.mat boundaries
whos boundaries
Name Size Bytes Class Attributesboundaries 10x1 25376 cell
要将这些数据映射到世界帧,我们需要定义图像的位置以及像素坐标和空间坐标之间的比例关系。
% Image origin coordinates
imageOrigin = [0.4,0.2,0.08];% Scale factor to convert from pixels to physical distance
scale = 0.0015;
还必须定义每个点上所需的末端效应器方向的欧拉角。
eeOrientation = [0, pi, 0];
在本例中,选择的方向是使末端效应器始终垂直于图像平面。
一旦确定了这些信息,就可以将每组所需的坐标和欧拉角编译成一个航点。每个航点都表示为一个六元素矢量,其中前三个元素对应的是操纵器在世界帧中的预期 xyz 位置。后三个元素对应于所需方位的 ZYX 欧拉角。
W a y p o i n t = [ X Y Z ϕ z ϕ y ϕ x ] \mathrm{Waypoint}=\ \!\left[X\ \ Y\ \ Z\ \ \phi_{z}\ \ \phi_{y}\ \ \phi_{x}\right] Waypoint= [X Y Z ϕz ϕy ϕx]
这些航点被连接成一个 n-by-6 的数组,其中 n 是轨迹中姿势的总数。数组中的每一行对应轨迹中的一个航点。
% Clear previous waypoints and begin building wayPoint array
clear wayPoints% Start just above image origin
waypt0 = [imageOrigin + [0 0 .2],eeOrientation];% Touch the origin of the image
waypt1 = [imageOrigin,eeOrientation];% Interpolate each element for smooth motion to the origin of the image
for i = 1:6interp = linspace(waypt0(i),waypt1(i),100);wayPoints(:,i) = interp';end
总共有 10 枚硬币。为了简化和提高速度,可以通过限制传递给航点的总数来追踪较少的硬币子集。该代码在图像中追踪的硬币数量为 3 枚。
% Define the number of coins to trace
numTraces = 3;% Assemble the waypoints for boundary tracing
for i = 1:min(numTraces, size(boundaries,1))%Select a boundary and map to physical sizesegment = boundaries{i}*scale;% Pad data for approach waypoint and lift waypoint between boundariessegment = [segment(1,:); segment(:,:); segment(end,:)];% Z-offset for moving between boundariessegment(1,3) = .02;segment(end,3) = .02;% Translate to origin of imagecartesianCoord = imageOrigin + segment;% Repeat desired orientation to match the number of waypoints being addedeulerAngles = repmat(eeOrientation,size(segment,1),1);% Append data to end of previous wayPoints wayPoints = [wayPoints;cartesianCoord, eulerAngles];
end
该数组是模型的主要输入。该数组是模型的主要输入。该数组是模型的主要输入。
四、模型设置
在模型运行之前,必须对几个参数进行初始化。
% Initialize size of q0, the robot joint configuration at t=0. This will
% later be replaced by the first waypoint.
q0 = zeros(numJoints,1);% Define a sampling rate for the simulation.
Ts = .01;% Define a [1x6] vector of relative weights on the orientation and
% position error for the inverse kinematics solver.
weights = ones(1,6);% Transform the first waypoint to a Homogenous Transform Matrix for initialization
initTargetPose = eul2tform(wayPoints(1,4:6));
initTargetPose(1:3,end) = wayPoints(1,1:3)';% Solve for q0 such that the manipulator begins at the first waypoint
ik = inverseKinematics('RigidBodyTree',sawyer);
[q0,solInfo] = ik(eeName,initTargetPose,weights,q0);
五、模拟机械手运动
要模拟该模型,请使用 sim 命令。模型会生成输出数据集 jointData,并在两个图中显示进度:
-
X Y 图显示了机械手自上而下的追踪动作。当机械手从一个硬币轮廓过渡到下一个硬币轮廓时,圆圈之间会出现线条。
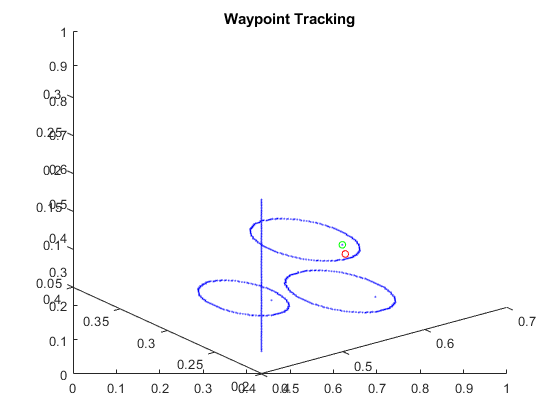
-
航点跟踪图显示的是三维进展情况。绿点表示目标位置。红点表示末端执行器通过反馈控制实现的实际末端执行器位置。
% Close currently open figures
close all% Open & simulate the model
open_system('IKTrajectoryControlExample.slx');
sim('IKTrajectoryControlExample.slx');
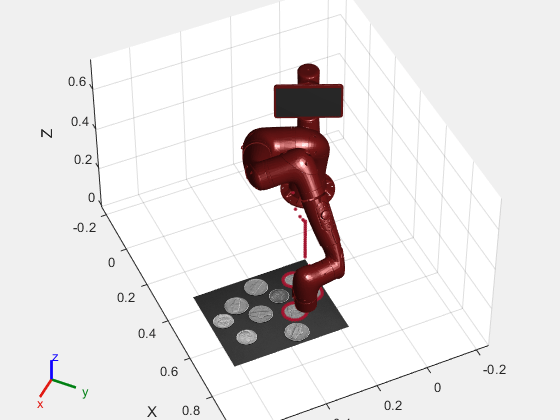
六、将结果可视化
模型会输出两个数据集,用于模拟后的可视化。关节配置以 jointData 的形式提供。机器人末端执行器的姿势以 poseData 的形式输出。
% Remove unnecessary meshes for faster visualization
clearMeshes(sawyer);% Data for mapping image
[m,n] = size(I);[X,Y] = meshgrid(0:m,0:n);
X = imageOrigin(1) + X*scale;
Y = imageOrigin(2) + Y*scale;Z = zeros(size(X));
Z = Z + imageOrigin(3);% Close all open figures
close all% Initialize a new figure window
figure;
set(gcf,'Visible','on');% Plot the initial robot position
show(sawyer, jointData(1,:)');
hold on% Initialize end effector plot position
p = plot3(0,0,0,'.');
warp(X,Y,Z,I');% Change view angle and axis
view(65,45)
axis([-.25 1 -.25 .75 0 0.75])% Iterate through the outputs at 10-sample intervals to visualize the results
for j = 1:10:length(jointData)% Display manipulator modelshow(sawyer,jointData(j,:)', 'Frames', 'off', 'PreservePlot', false);% Get end effector position from homoegenous transform outputpos = poseData(1:3,4,j);% Update end effector position for plotp.XData = [p.XData pos(1)];p.YData = [p.YData pos(2)];p.ZData = [p.ZData pos(3)];% Update figuredrawnow
end
相关文章:
MATLAB 机械臂逆运动学进行轨迹控制建模
系列文章目录 文章目录 系列文章目录前言一、模型概览1.1 Target Pose Generation 目标姿势生成1.2 Inverse Kinematics 逆运动学1.3 Manipulator Dynamics 机械手动力学1.4 Pose Measurement 姿势测量 二、机械手定义三、生成航点四、模型设置五、模拟机械手运动六、将结果可视…...
【计算机组成原理】定点加法、减法运算
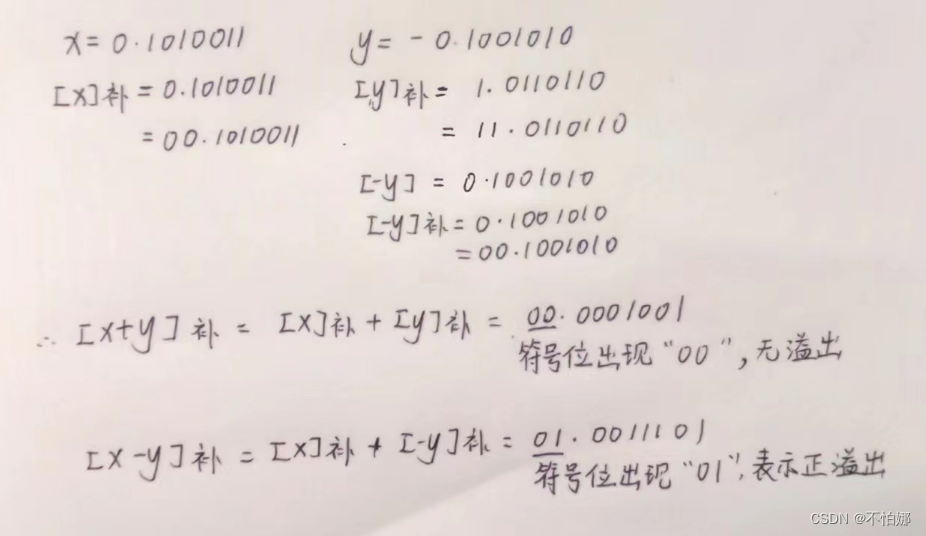
系列文章目录 绘制出纯整数(1字节)和纯小数的数轴 将十进制数20.59375,转换成754标准的32位浮点数的二进制存储格式 用双符号位补码求 x 0.1010011, y -0.1001010, 分别求出 x y, x - y,并判溢出...

scp 跨服务器传输命令,把一个服务器上的文件复制传到当前服务器目录下
要将一个服务器上的文件复制到当前服务器的目录下,可以使用 scp 命令进行跨服务器传输。以下是具体的命令格式: 复制 scp usernamesource_server:/path/to/source_file destination_directory username: 远程服务器的用户名。 source_server: 远程服务…...

【python基础】用户输入和while循环详解
文章目录 一. 函数input()的工作原理1. 编写清晰的程序2. 使用int()来获取数值输入3. 求模运算符 二. while循环简介1. 使用while循环2. 让用户选择何时退出3. 使用标志4. 使用break退出循环5. 在循环中使用continue 三. 使用while循环处理列表和字典1. 在列表之间移动元素2. 删…...
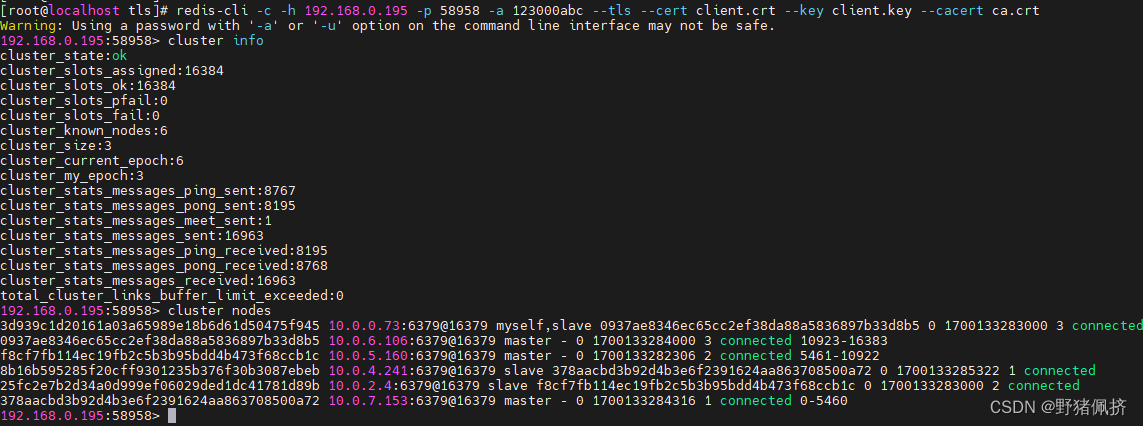
k8s-部署Redis-cluster(TLS)
helm pull bitnami/redis-cluster v8.3.8拉取源码生成证书 git clone https://github.com/redis/redis.git #文档 https://redis.io/docs/management/security/encryption/#getting-started生成你的TLS证书用官网的工具生成 1 Run ./utils/gen-test-certs.sh 生成根CA和服务…...

计算机毕业设计选题推荐-幼儿园管理微信小程序/安卓APP-项目实战
✨作者主页:IT毕设梦工厂✨ 个人简介:曾从事计算机专业培训教学,擅长Java、Python、微信小程序、Golang、安卓Android等项目实战。接项目定制开发、代码讲解、答辩教学、文档编写、降重等。 ☑文末获取源码☑ 精彩专栏推荐⬇⬇⬇ Java项目 Py…...

ElasticStack日志分析平台-ES 集群、Kibana与Kafka
一、Elasticsearch 1、介绍: Elasticsearch 是一个开源的分布式搜索和分析引擎,Logstash 和 Beats 收集的数据可以存储在 Elasticsearch 中进行搜索和分析。 Elasticsearch为所有类型的数据提供近乎实时的搜索和分析:一旦数据被索引&#…...
微机原理_10
一、单项选择题(本大题共15小题,每小题3分,共45分。在每小题给出的四个备选项中,选出一个正确的答案。) 1,将二进制数110110.01转换为十六进制为() A. 66.1H B. 36.4H C. 66.4 D. 36.2 2,一台计算机的字长是4个字节,含义是() A.能处理的最大…...
第八章:SpringMVC程序开发)
(SpringBoot)第八章:SpringMVC程序开发
文章目录 一:Spring MVC概述(1)什么是Spring MVC(2)什么是MVC(3)Spring MVC和SpringBoot(4)如何学习Spring MVC二:Spring MVC创建和连接(1)Spring MVC项目创建(2)@RequestMapping注解三:Spring MVC处理参数(1)传递简单参数(2)传递对象(3)@RequestParam:重…...
)
openssl + 3DES开发实例(linux)
文章目录 一、3DES介绍3DES 的特点:3DES 加密的步骤:3DES 的应用场景: 二、3DES原理1. DES 原理回顾:2. 3DES 原理:3. 3DES 的加密流程: 三、openssl 3DES开发实例 一、3DES介绍 3DES(Triple …...

遵循开源软件安全路线图
毫无疑问,开源软件对于满足联邦任务所需的开发和创新至关重要,因此其安全性至关重要。 OSS(运营支持系统) 支持联邦政府内的每个关键基础设施部门。 联邦政府认识到这一点,并正在采取措施优先考虑 OSS 安全ÿ…...

294_C++_
1、全部大致解析: struct alarminfo_t {unsigned int alarmid;INTF_ALARM_INFO_S pAlarm; };typedef enum{INTF_IO_ALARM_E= 0, //I/O探头告警开始INTF_MOTION_ALARM_E, //移动侦测告警开始INTF_AI_ALARM_E,...
【计算机网络笔记】网络地址转换(NAT)
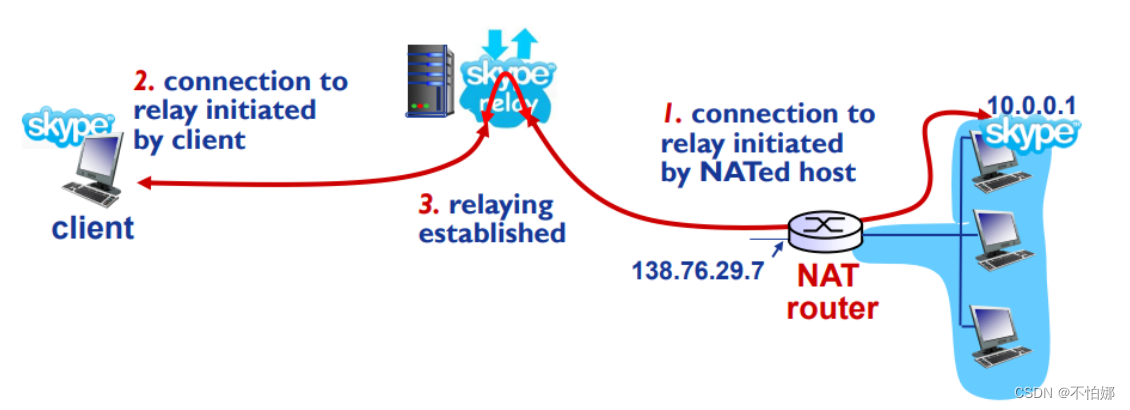
系列文章目录 什么是计算机网络? 什么是网络协议? 计算机网络的结构 数据交换之电路交换 数据交换之报文交换和分组交换 分组交换 vs 电路交换 计算机网络性能(1)——速率、带宽、延迟 计算机网络性能(2)…...
【flink理论】动态表:关系查询处理流的思路:连续查询、状态维护;表转换为流需要编码编码
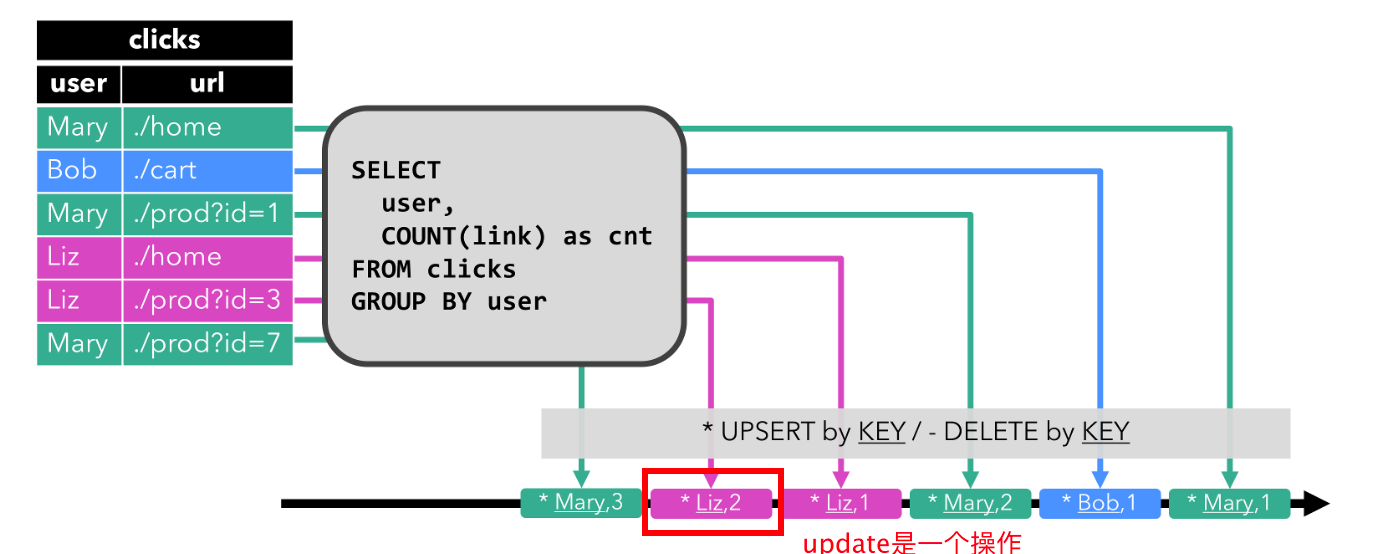
文章目录 一. 使用关系查询处理流的讨论二. 动态表 & 连续查询(Continuous Query)三. 在流上定义表1. 连续查询2. 查询限制2.1. 维护状态2.2. 计算更新 四. 表到流的转换1. Append-only 流2. Retract 流3. Upsert 流 本文主要讨论了: 讨论通过关系查询处理无界流…...

2023年09月 Python(六级)真题解析#中国电子学会#全国青少年软件编程等级考试
Python等级考试(1~6级)全部真题・点这里 一、单选题(共25题,每题2分,共50分) 第1题 以下选项中,不是tkinter变量类型的是?( ) A: IntVar() B: StringVar() C: DoubleVar() D: FloatVar() 答案:D tkinter 无 FloatVar()变量类型。 第2题 关于tkinter,以下说…...
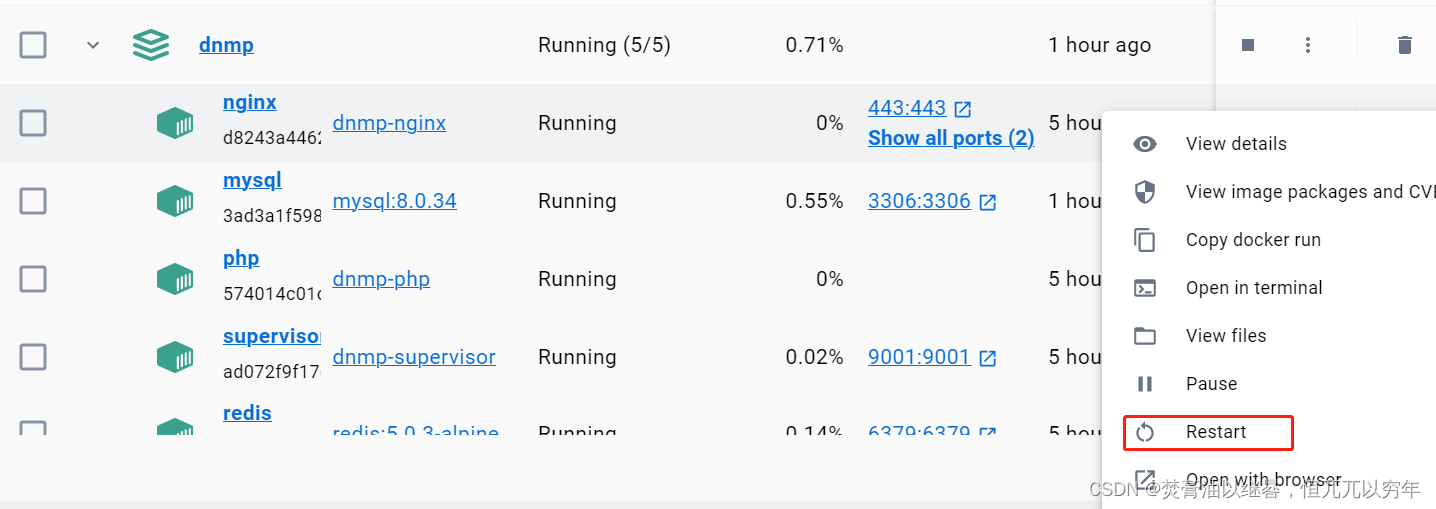
Ubuntu16.04上安装Docker
Ubuntu16.04上安装Docker 更新 apt 包索引: sudo apt-get update安装依赖包,以便使用 HTTPS 仓库 sudo apt-get install apt-transport-https ca-certificates curl software-properties-common添加 Docker GPG 密钥 curl -fsSL https://download.docker.com/linux/ubuntu…...
FSOD论文阅读 - 基于卷积和注意力机制的小样本目标检测
来源:知网 标题:基于卷积和注意力机制的小样本目标检测 作者:郭永红,牛海涛,史超,郭铖 郭永红,牛海涛,史超,郭铖.基于卷积和注意力机制的小样本目标检测 [J/OL].兵工学报. https://…...
Windows系统中搭建docker (ubuntu,Docker-desktop)
一、docker安装前的准备工作 1. 开启CPU虚拟化,新电脑该默认是开启的,如果没开启可以根据自己电脑型号品牌搜索如克开启CPU虚拟化。当开启成功后可在设备管理器中看到。 2.开通Hyper-V 通过 Windows 控制面板 --> 程序和功能 -->启用或关闭…...

使用记录-MongoDB
find常用方法 在 MongoDB 的 find 方法中,可以使用各种查询操作符来执行不同类型的查询。其中之一是 $in 操作符,它用于在一个字段中匹配多个值。 $eq 操作符: 用于匹配字段值等于指定值的文档。 // 查询 age 字段等于 25 的文档 db.colle…...
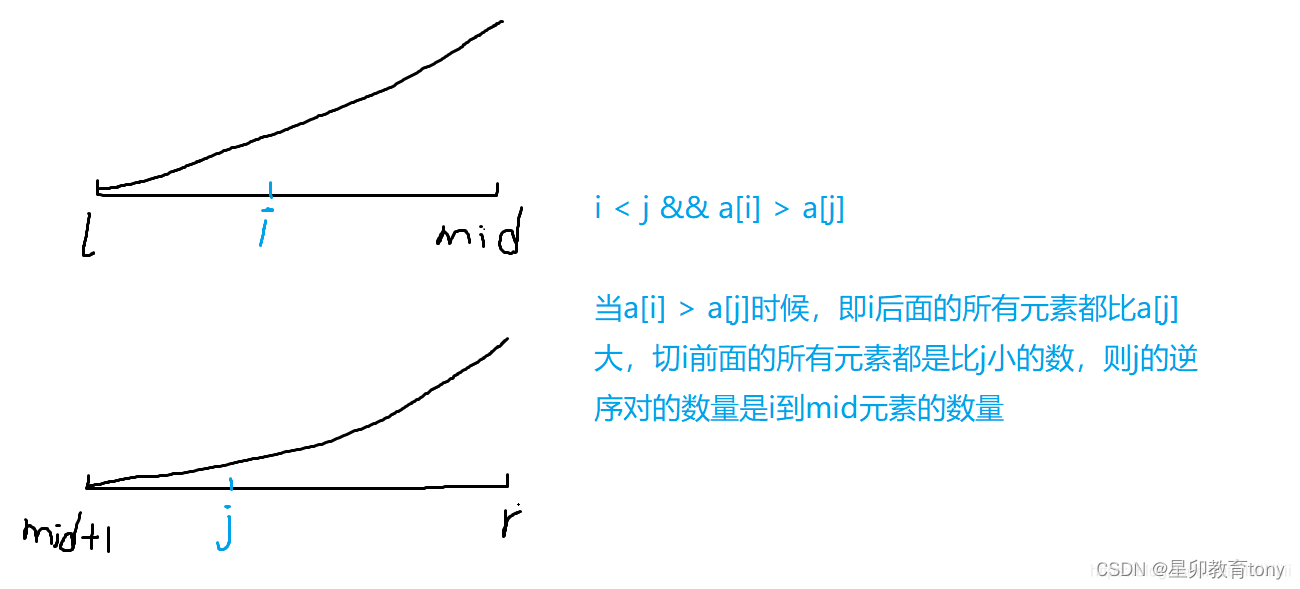
用归并排序算法merge_sort( )求解 逆序对的数量 降低时间复杂度为 nlogn
题目简述 给定一个序列有n个数,求n个数中逆序对的个数,逆序对的定义:i < j && a[i] > a[j]。 输入格式 第一行包含一个整数n。 第二行包含 n 个整数(所有整数均在1~1e9范围内),表示整数数…...
:OpenBCI_GUI:从环境搭建到数据可视化(下))
脑机新手指南(八):OpenBCI_GUI:从环境搭建到数据可视化(下)
一、数据处理与分析实战 (一)实时滤波与参数调整 基础滤波操作 60Hz 工频滤波:勾选界面右侧 “60Hz” 复选框,可有效抑制电网干扰(适用于北美地区,欧洲用户可调整为 50Hz)。 平滑处理&…...

【SpringBoot】100、SpringBoot中使用自定义注解+AOP实现参数自动解密
在实际项目中,用户注册、登录、修改密码等操作,都涉及到参数传输安全问题。所以我们需要在前端对账户、密码等敏感信息加密传输,在后端接收到数据后能自动解密。 1、引入依赖 <dependency><groupId>org.springframework.boot</groupId><artifactId...
指令的指南)
在Ubuntu中设置开机自动运行(sudo)指令的指南
在Ubuntu系统中,有时需要在系统启动时自动执行某些命令,特别是需要 sudo权限的指令。为了实现这一功能,可以使用多种方法,包括编写Systemd服务、配置 rc.local文件或使用 cron任务计划。本文将详细介绍这些方法,并提供…...
微服务商城-商品微服务
数据表 CREATE TABLE product (id bigint(20) UNSIGNED NOT NULL AUTO_INCREMENT COMMENT 商品id,cateid smallint(6) UNSIGNED NOT NULL DEFAULT 0 COMMENT 类别Id,name varchar(100) NOT NULL DEFAULT COMMENT 商品名称,subtitle varchar(200) NOT NULL DEFAULT COMMENT 商…...
BCS 2025|百度副总裁陈洋:智能体在安全领域的应用实践
6月5日,2025全球数字经济大会数字安全主论坛暨北京网络安全大会在国家会议中心隆重开幕。百度副总裁陈洋受邀出席,并作《智能体在安全领域的应用实践》主题演讲,分享了在智能体在安全领域的突破性实践。他指出,百度通过将安全能力…...

Caliper 配置文件解析:config.yaml
Caliper 是一个区块链性能基准测试工具,用于评估不同区块链平台的性能。下面我将详细解释你提供的 fisco-bcos.json 文件结构,并说明它与 config.yaml 文件的关系。 fisco-bcos.json 文件解析 这个文件是针对 FISCO-BCOS 区块链网络的 Caliper 配置文件,主要包含以下几个部…...

Spring是如何解决Bean的循环依赖:三级缓存机制
1、什么是 Bean 的循环依赖 在 Spring框架中,Bean 的循环依赖是指多个 Bean 之间互相持有对方引用,形成闭环依赖关系的现象。 多个 Bean 的依赖关系构成环形链路,例如: 双向依赖:Bean A 依赖 Bean B,同时 Bean B 也依赖 Bean A(A↔B)。链条循环: Bean A → Bean…...

Java + Spring Boot + Mybatis 实现批量插入
在 Java 中使用 Spring Boot 和 MyBatis 实现批量插入可以通过以下步骤完成。这里提供两种常用方法:使用 MyBatis 的 <foreach> 标签和批处理模式(ExecutorType.BATCH)。 方法一:使用 XML 的 <foreach> 标签ÿ…...

华为OD机考-机房布局
import java.util.*;public class DemoTest5 {public static void main(String[] args) {Scanner in new Scanner(System.in);// 注意 hasNext 和 hasNextLine 的区别while (in.hasNextLine()) { // 注意 while 处理多个 caseSystem.out.println(solve(in.nextLine()));}}priv…...

[ACTF2020 新生赛]Include 1(php://filter伪协议)
题目 做法 启动靶机,点进去 点进去 查看URL,有 ?fileflag.php说明存在文件包含,原理是php://filter 协议 当它与包含函数结合时,php://filter流会被当作php文件执行。 用php://filter加编码,能让PHP把文件内容…...