OpenCV图像纹理
LBP描述
LBP(Local Binary Pattern,局部二值模式)是一种用来描述图像局部纹理特征的算子;它具有旋转不变性和灰度不变性等显著的优点。它是首先由T. Ojala, M.Pietikäinen, 和D. Harwood 在1994年提出,用于纹理特征提取。而且,提取的特征是图像的局部的纹理特征
计算过程
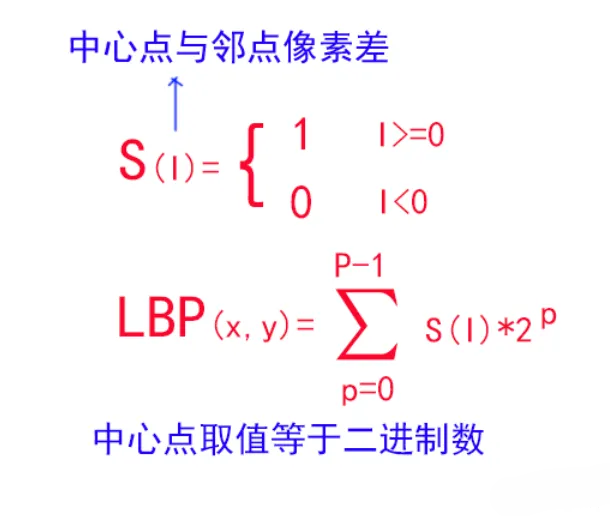
原始的LBP算子定义为在3\*3的窗口内,以窗口中心像素为阈值,将相邻的8个像素的灰度值与其进行比较,若周围像素值大于中心像素值,则该像素点的位置被标记为1,否则为0。这样,3\*3邻域内的8个点经比较可产生8位二进制数(通常转换为十进制数即LBP码,共256种),即得到该窗口中心像素点的LBP值,并用这个值来反映该区域的纹理信息。数学表达式方式如下图所示
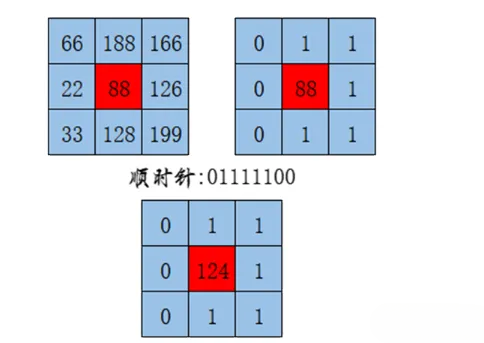
上述表述可能会比较抽象,接下来我们举一个例子表述 一下:
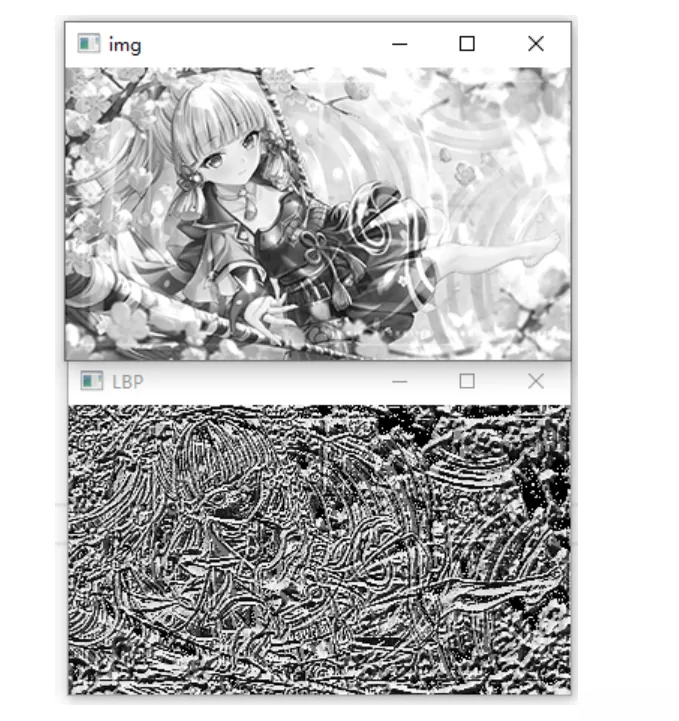
代码实现
class LBP
{
public:LBP(string url = "mm.jpg") :img(imread(url, IMREAD_GRAYSCALE)) {result["img"] = img;}void GetLBP(){result["LBP"] = Mat::zeros(img.rows - 2, img.cols - 2, CV_8UC1);for (int i = 1; i < img.rows - 1; i++) {for (int j = 1; j < img.cols - 1; j++) {uchar temp = img.at<uchar>(i, j);uchar color = 0;color |= (img.at<uchar>(i - 1, j - 1) > temp) << 7;color |= (img.at<uchar>(i - 1, j) > temp) << 6;color |= (img.at<uchar>(i - 1, j + 1) > temp) << 5;color |= (img.at<uchar>(i, j + 1) > temp) << 4;color |= (img.at<uchar>(i+1, j + 1) > temp) << 3;color |= (img.at<uchar>(i+1, j) > temp) << 2;color |= (img.at<uchar>(i+1, j - 1) > temp) << 1;color |= (img.at<uchar>(i, j - 1) > temp) << 0;result["LBP"].at<uchar>(i - 1, j - 1) = color;}}}void Show() {for (auto v : result) {imshow(v.first, v.second);}waitKey(0);}protected:map<string, Mat> result;Mat img;
}; 
SIFT特征检测
尺度不变特征转换(Scale-invariant feature transform或SIFT)是一种电脑视觉的算法用来侦测与描述影像中的局部性特征,它在空间尺度中寻找极值点,并提取出其位置、尺度、旋转不变量,此算法由 David Lowe在1999年所发表,2004年完善总结。 其应用范围包含物体辨识、机器人地图感知与导航、影像缝合、3D模型建立、手势辨识、影像追踪和动作比对。
SIFT算法是为了解决图片的匹配问题,想要从图像中提取一种对图像的大小和旋转变化保持鲁棒的特征,从而实现匹配。这一算法的灵感也十分的直观:人眼观测两张图片是否匹配时会注意到其中的典型区域(特征点部分),如果我们能够实现这一特征点区域提取过程,再对所提取到的区域进行描述就可以实现特征匹配了。
SIFT算法大致流程
高斯金字塔
- 人看物体时近大远小,可以对图片下采样实现
- 远处模糊,可以对图像高斯平滑实现
高斯差分金字塔特征提取
- 获取了不同尺度的图片
- 获取高频区域(边缘检测的算法使用差分滤波器如拉普拉斯滤波器、sobel滤波器)
特征点处理
- 阈值化操作(去噪)
- 非极大值抑制
- 二阶泰勒修正
- 低对比度去除
- 边缘效应去除
描述特征点
- 确定特征点区域方向
- 特征点区域描述子
API介绍
static Ptr<SIFT> create(int nfeatures = 0, int nOctaveLayers = 3,double contrastThreshold = 0.04, double edgeThreshold = 10,double sigma = 1.6);
/*******************************************************************
* nfeatures: 保留的最佳特性的数量
* cornOctaveLayersners: 高斯金字塔最小层级数
* contrastThreshold: 对比度阈值用于过滤区域中的弱特征
* edgeThreshold: 用于过滤掉类似边缘特征的阈值
* sigma: 高斯输入层级
*********************************************************************/
virtual void detect( InputArray image,std::vector<KeyPoint>& keypoints,InputArray mask=noArray());
/*******************************************************************
* image: 输入图
* keypoints: 角点信息
* mask: 计算亚像素角点区域大小
*********************************************************************/
void drawKeypoints( InputArray image, const std::vector<KeyPoint>& keypoints, InputOutputArray outImage,const Scalar& color=Scalar::all(-1), DrawMatchesFlags flags=DrawMatchesFlags::DEFAULT );
/*******************************************************************
* image: 输入图
* keypoints: 角点信息
* outImage: 输出图
* color: 颜色
* flags: 绘制标记
*********************************************************************/
完整代码
#include <iostream>
#include <map>
#include <new>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
class SIFTFeature
{
public:SIFTFeature() :img(imread("mm.jpg")) {result["img"] = img;}void TestSIFT() {Ptr<SIFT> sift = SIFT::create();sift->detect(img, point);drawKeypoints(img, point, result["SIFT"], Scalar(255, 0, 255));}void Show() {for (auto& v : result) {imshow(v.first, v.second);}waitKey(0);}
protected:Mat img;vector<KeyPoint> point;map<string, Mat> result;
};int main()
{unique_ptr<SIFTFeature> p(new SIFTFeature);p->TestSIFT();p->Show();return 0;
}效果图:

相关文章:
OpenCV图像纹理
LBP描述 LBP(Local Binary Pattern,局部二值模式)是一种用来描述图像局部纹理特征的算子;它具有旋转不变性和灰度不变性等显著的优点。它是首先由T. Ojala, M.Pietikinen, 和D. Harwood 在1994年提出,用于纹理特征提取…...

自媒体写手提问常用的ChatGPT通用提示词模板
如何撰写一篇具有吸引力和可读性的自媒体文章? 如何确定自媒体文章的主题和受众群体? 如何为自媒体文章取一个引人入胜的标题? 如何让自媒体文章的开头更加吸引人? 如何为自媒体文章构建一个清晰、逻辑严谨的框架?…...

分类预测 | Matlab实现PSO-LSTM-Attention粒子群算法优化长短期记忆神经网络融合注意力机制多特征分类预测
分类预测 | Matlab实现PSO-LSTM-Attention粒子群算法优化长短期记忆神经网络融合注意力机制多特征分类预测 目录 分类预测 | Matlab实现PSO-LSTM-Attention粒子群算法优化长短期记忆神经网络融合注意力机制多特征分类预测分类效果基本描述程序设计参考资料 分类效果 基本描述 1…...
3GPP TS38.201 NR; Physical layer; General description (Release 18)
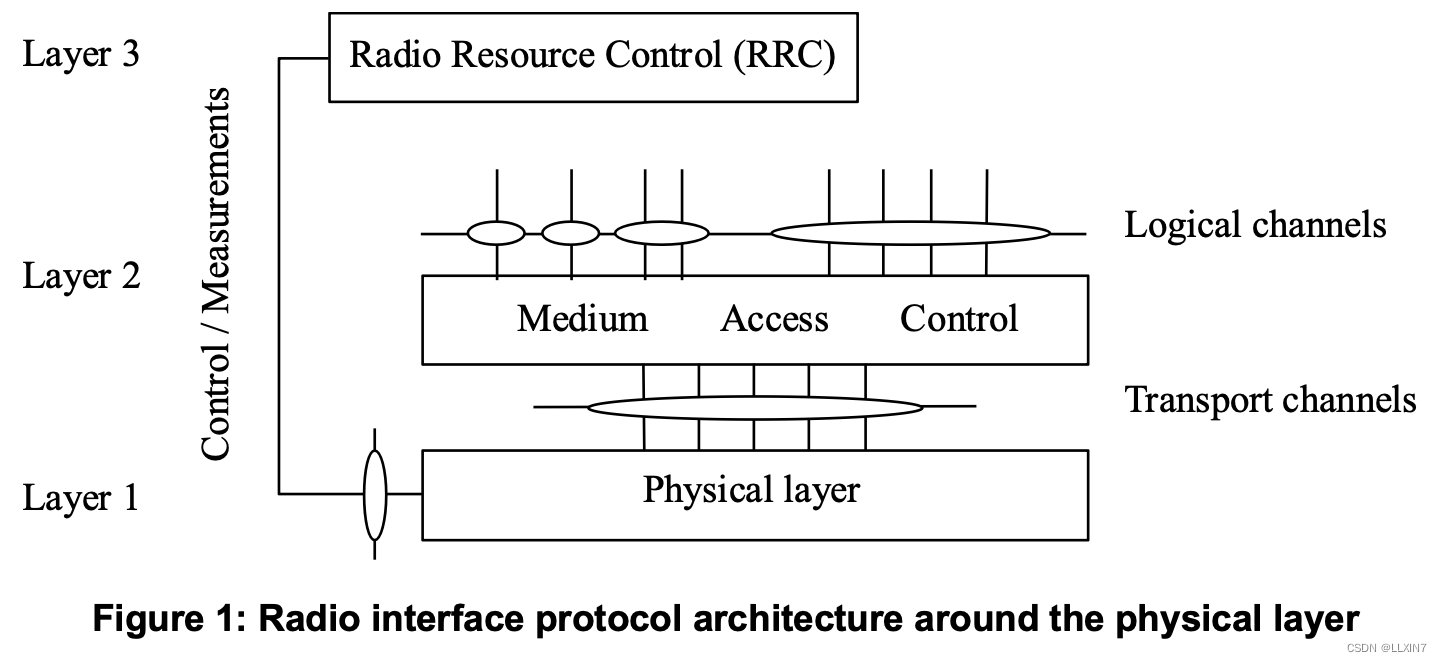
TS38.201是介绍性的标准,简单介绍了RAN的信道组成和PHY层承担的功能,下图是PHY层相关标准的关系。 文章目录 结构信道类型调制方式PHY层支持的过程物理层测量其他标准TS 38.202: Physical layer services provided by the physical layerTS 38.211: Ph…...
【GitLab】-HTTP 500 curl 22 The requested URL returned error: 500~SSH解决
写在前面 本文主要介绍通过SSH的方式拉取GitLab代码。 目录 写在前面一、场景描述二、具体步骤1.环境说明2.生成秘钥3.GitLab添加秘钥4.验证SSH方式4.更改原有HTTP方式为SSH 三、参考资料写在后面系列文章 一、场景描述 之前笔者是通过 HTTP Personal access token 的方式拉取…...

【如何学习Python自动化测试】—— 自动化测试环境搭建
1、 自动化测试环境搭建 1.1 为什么选择 Python 什么是python,引用python官方的说法就是“一种解释型的、面向对象、带有励志语义的高级程序设计语言”,对于很多测试人员来说,这段话包含了很多术语,而测试人员大多是希望利用编程…...
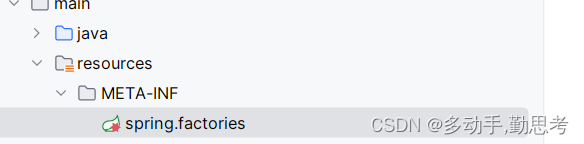
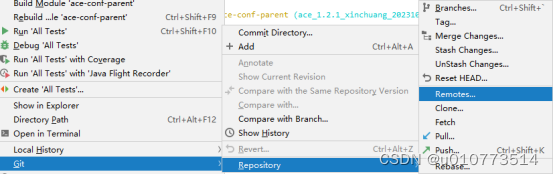
在通用jar包中引入其他spring boot starter,并在通用jar包中直接配置这些starter的yml相关属性
场景 我在通用jar包中引入 spring-boot-starter-actuator 这样希望引用通用jar的所有服务都可以直接使用 actuator 中的功能, 问题在于,正常情况下,actuator的配置都写在每个项目的yml文件中,这就意味着,虽然每个项目…...

Seaborn 回归(Regression)及矩阵(Matrix)绘图
Seaborn中的回归包括回归拟合曲线图以及回归误差图。Matrix图主要是热度图。 1. 回归及矩阵绘图API概述 seaborn中“回归”绘图函数共3个: lmplot(回归统计绘图):figure级regplot函数,绘图同regplot完全相同。(lm指lin…...
nginx学习(1)
一、下载安装NGINX: 先安装gcc-c编译器 yum install gcc-c yum install -y openssl openssl-devel(1)下载pcre-8.3.7.tar.gz 直接访问:http://downloads.sourceforge.net/project/pcre/pcre/8.37/pcre-8.37.tar.gz,就…...
CLEARTEXT communication to XX not permitted by network security policy 报错
在进行网络请求时,日志中打印 CLEARTEXT communication to XX not permitted by network security policy 原因: Android P系统网络访问安全策略升级,限制了非加密的流量请求 Android P系统限制了明文流量的网络请求,之下的版本…...
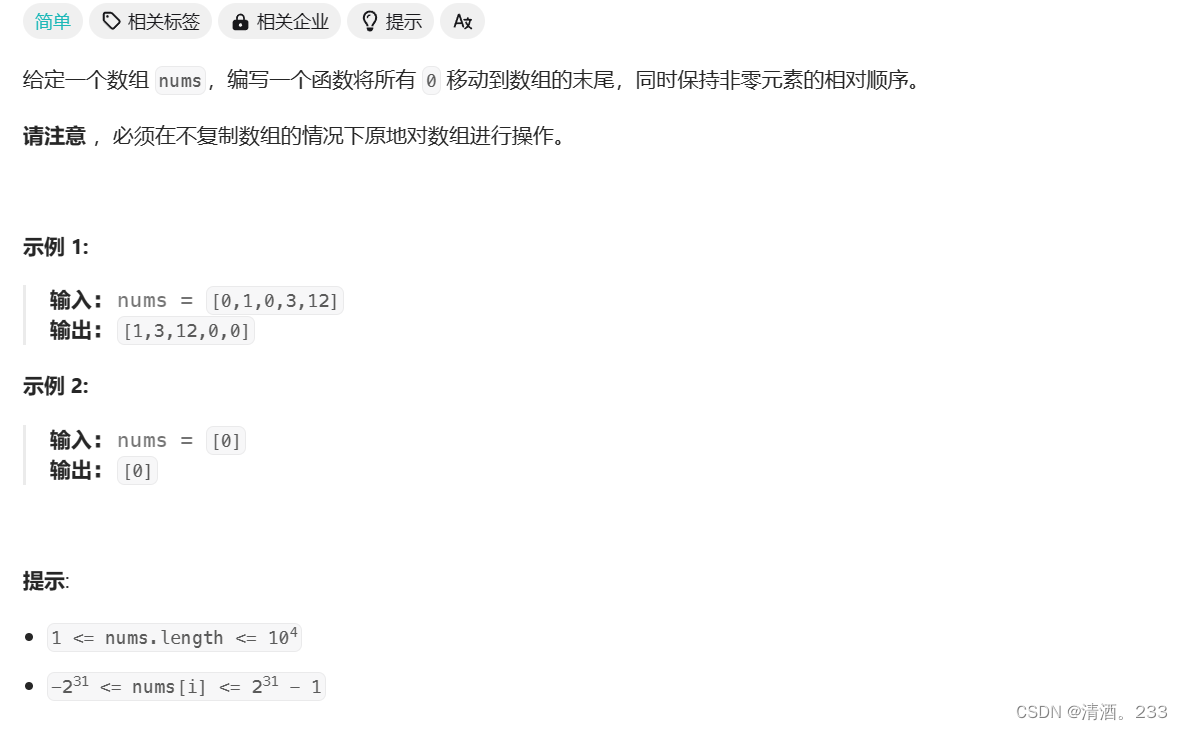
91.移动零(力扣)
问题描述 代码解决以及思想 class Solution { public:void moveZeroes(vector<int>& nums) {int left 0; // 左指针,用于指向当前非零元素应该放置的位置int right 0; // 右指针,用于遍历数组int len nums.size(); // 数组长度while …...
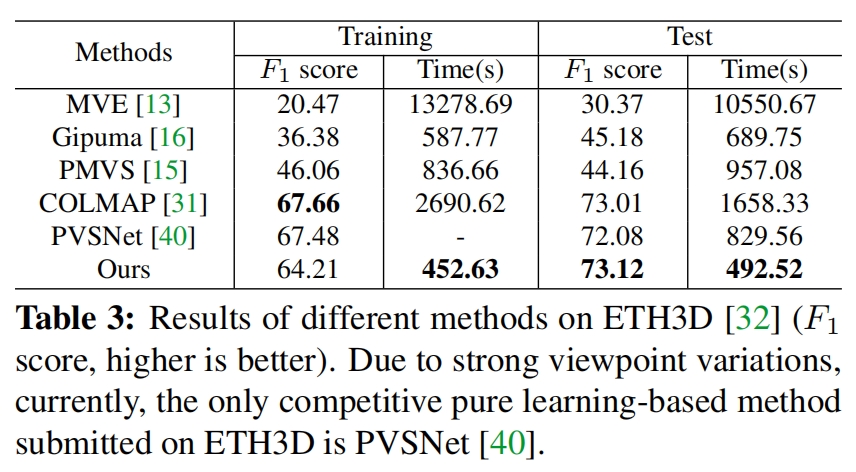
PatchMatchNet笔记
PatchMatchNet笔记 1 概述2 PatchmatchNet网络结构图2.1 多尺度特征提取2.2 基于学习的补丁匹配 3 性能评价 PatchmatchNet: Learned Multi-View Patchmatch Stereo:基于学习的多视角补丁匹配立体算法 1 概述 特点 高速,低内存,可以处理…...

实时人眼追踪、内置3D引擎,联想ThinkVision裸眼3D显示器创新四大应用场景
11月17日,在以“因思而变 智领未来”为主题的Think Centre和ThinkVision 20周年纪念活动上,联想正式发布了业内首款2D/3D 可切换裸眼3D显示器——联想ThinkVision 27 3D。该产品首次将裸眼2D、3D可切换技术应用在显示器领域,并拓展了3D技术多…...
)
SELinux零知识学习十四、SELinux策略语言之客体类别和许可(8)
接前一篇文章:SELinux零知识学习十三、SELinux策略语言之客体类别和许可(7) 一、SELinux策略语言之客体类别和许可 4. 客体类别许可实例 (2)文件客体类别许可 文件客体类别有三类许可:直接映像到标准Lin…...
Unity——URP相机详解
2021版本URP项目下的相机,一般新建一个相机有如下组件 1:Render Type(渲染类型) 有Base和Overlay两种选项,默认是Base选项 Base:主相机使用该种渲染方式,负责渲染场景中的主要图形元素 Overlay(叠加):使用了Oveylay的…...

CRUD-SQL
文章目录 前置insertSelective和upsertSelective使用姿势手写sql,有两种方式 一、增当导入的数据不存在时则进行添加,有则更新 1.1 唯一键,先查,后插1.2 批量插1.2.1 批次一200、批次二200、批次三200,有一条数据写入失…...

【C语言 | 数组】C语言数组详解(经典,超详细)
😁博客主页😁:🚀https://blog.csdn.net/wkd_007🚀 🤑博客内容🤑:🍭嵌入式开发、Linux、C语言、C、数据结构、音视频🍭 🤣本文内容🤣&a…...

第三十三节——组合式API生命周期
一、基本使用 组合式api生命周期几乎和选项式一致。注意组合式api是从挂载阶段开始 <template><div></div> </template> <script setup> import {onBeforeMount, onMounted,onBeforeUpdate, onUpdated, onBeforeUnmount, onUnmounted, } from …...

【Linux】Alibaba Cloud Linux 3 安装 PHP8.1
一、系统安装 请参考 【Linux】Alibaba Cloud Linux 3 中第二硬盘、MySQL8.、MySQL7.、Redis、Nginx、Java 系统安装 二、安装源 rpm -ivh --nodeps https://rpms.remirepo.net/enterprise/remi-release-8.rpm sed -i s/PLATFORM_ID"platform:al8"/PLATFORM_ID&q…...
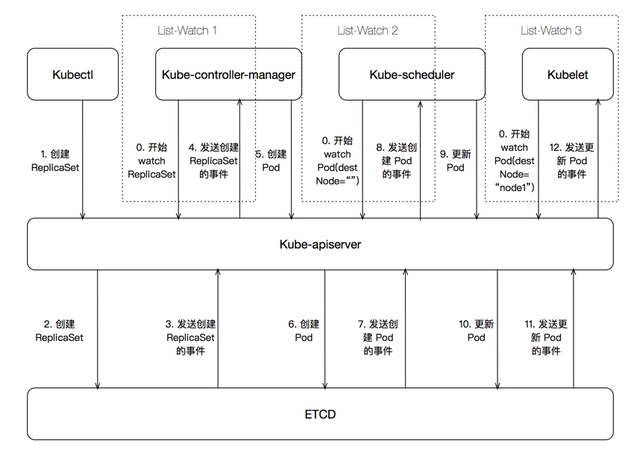
【容器化】Kubernetes(k8s)
文章目录 概述Docker 的管理痛点什么是 K8s云架构 & 云原生 架构核心组件K8s 的服务注册与发现组件调用流程部署单机版部署主从版本Operator来源拓展阅读 概述 Docker 虽好用,但面对强大的集群,成千上万的容器,突然感觉不香了。 这时候就…...
)
浏览器访问 AWS ECS 上部署的 Docker 容器(监听 80 端口)
✅ 一、ECS 服务配置 Dockerfile 确保监听 80 端口 EXPOSE 80 CMD ["nginx", "-g", "daemon off;"]或 EXPOSE 80 CMD ["python3", "-m", "http.server", "80"]任务定义(Task Definition&…...

java_网络服务相关_gateway_nacos_feign区别联系
1. spring-cloud-starter-gateway 作用:作为微服务架构的网关,统一入口,处理所有外部请求。 核心能力: 路由转发(基于路径、服务名等)过滤器(鉴权、限流、日志、Header 处理)支持负…...

R语言AI模型部署方案:精准离线运行详解
R语言AI模型部署方案:精准离线运行详解 一、项目概述 本文将构建一个完整的R语言AI部署解决方案,实现鸢尾花分类模型的训练、保存、离线部署和预测功能。核心特点: 100%离线运行能力自包含环境依赖生产级错误处理跨平台兼容性模型版本管理# 文件结构说明 Iris_AI_Deployme…...

2021-03-15 iview一些问题
1.iview 在使用tree组件时,发现没有set类的方法,只有get,那么要改变tree值,只能遍历treeData,递归修改treeData的checked,发现无法更改,原因在于check模式下,子元素的勾选状态跟父节…...

c#开发AI模型对话
AI模型 前面已经介绍了一般AI模型本地部署,直接调用现成的模型数据。这里主要讲述讲接口集成到我们自己的程序中使用方式。 微软提供了ML.NET来开发和使用AI模型,但是目前国内可能使用不多,至少实践例子很少看见。开发训练模型就不介绍了&am…...
中关于正整数输入的校验规则)
Element Plus 表单(el-form)中关于正整数输入的校验规则
目录 1 单个正整数输入1.1 模板1.2 校验规则 2 两个正整数输入(联动)2.1 模板2.2 校验规则2.3 CSS 1 单个正整数输入 1.1 模板 <el-formref"formRef":model"formData":rules"formRules"label-width"150px"…...

JAVA后端开发——多租户
数据隔离是多租户系统中的核心概念,确保一个租户(在这个系统中可能是一个公司或一个独立的客户)的数据对其他租户是不可见的。在 RuoYi 框架(您当前项目所使用的基础框架)中,这通常是通过在数据表中增加一个…...
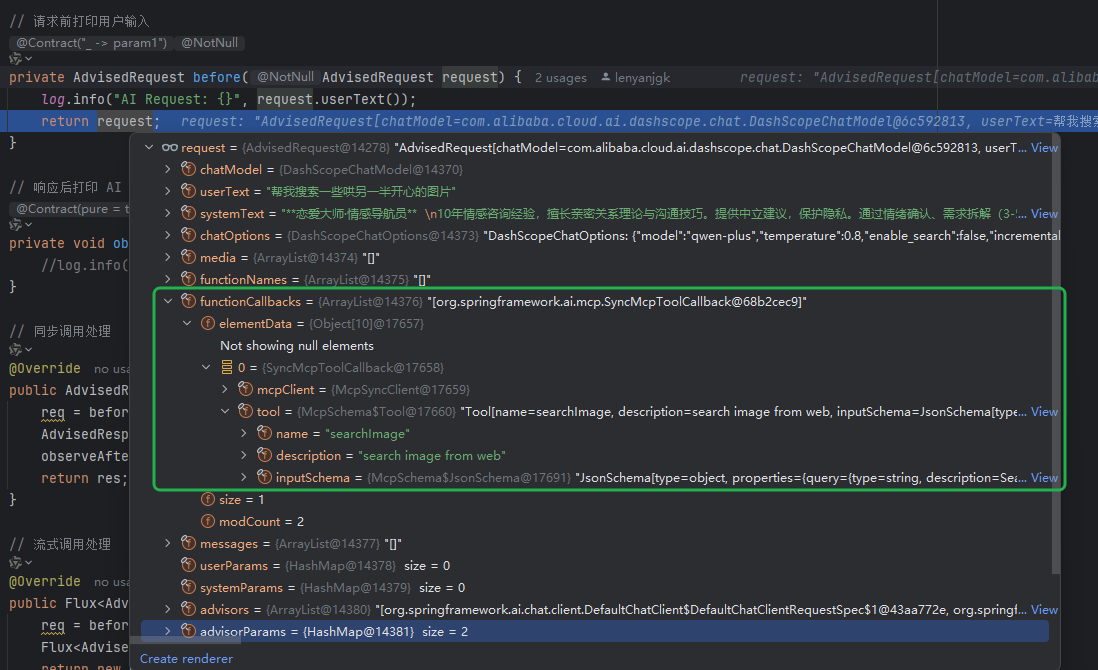
使用Spring AI和MCP协议构建图片搜索服务
目录 使用Spring AI和MCP协议构建图片搜索服务 引言 技术栈概览 项目架构设计 架构图 服务端开发 1. 创建Spring Boot项目 2. 实现图片搜索工具 3. 配置传输模式 Stdio模式(本地调用) SSE模式(远程调用) 4. 注册工具提…...

LangChain知识库管理后端接口:数据库操作详解—— 构建本地知识库系统的基础《二》
这段 Python 代码是一个完整的 知识库数据库操作模块,用于对本地知识库系统中的知识库进行增删改查(CRUD)操作。它基于 SQLAlchemy ORM 框架 和一个自定义的装饰器 with_session 实现数据库会话管理。 📘 一、整体功能概述 该模块…...
FFmpeg:Windows系统小白安装及其使用
一、安装 1.访问官网 Download FFmpeg 2.点击版本目录 3.选择版本点击安装 注意这里选择的是【release buids】,注意左上角标题 例如我安装在目录 F:\FFmpeg 4.解压 5.添加环境变量 把你解压后的bin目录(即exe所在文件夹)加入系统变量…...