相机通用类之海康相机,软触发硬触发(飞拍),并输出halcon格式对象
//在此之前可以先浏览我编写的通用上位机类,更方便理解
https://blog.csdn.net/m0_51559565/article/details/134403745
最近完成一个关于海康采图的demo,记录并说明用法。
先上代码。
using System;
using System.Collections.Generic;
using System.Runtime.InteropServices;
using System.Threading;
using MvCamCtrl.NET;
using HalconDotNet;
using System.Windows.Forms;
using WeldingInspection.MyCamer;namespace WeldingInspection
{public partial class HKCamerSDK: MyBaseCamera{//创建相机集合,用于存放相机MyCamera.MV_CC_DEVICE_INFO_LIST m_pDeviceList;MyCamera.MV_CC_DEVICE_INFO device;MyCamera HKMyCamera = new MyCamera();MyCamera.cbOutputExdelegate ImageCallback;MyCamera.cbExceptiondelegate pCallBackFunc;HObject hPylonImage = new HObject();/// <summary>/// 查找并开启相机/// </summary>/// <param name="CamerNum">开启第几个相机</param>/// <returns>开启成功返回true,开启失败返回false,并在输出打印错误码</returns>public override List<string> FindCamer(){int nRet;List<string> CamerName = new List<string>();// ch:创建设备列表 en:Create Device ListSystem.GC.Collect();nRet = MyCamera.MV_CC_EnumDevices_NET(MyCamera.MV_GIGE_DEVICE | MyCamera.MV_USB_DEVICE, ref m_pDeviceList);if (0 != nRet){Console.WriteLine("NOT find Camer! {0:x8}", nRet);return null;}//在输出打印相机名称 for (int i = 0; i < m_pDeviceList.nDeviceNum; i++){MyCamera.MV_CC_DEVICE_INFO device = (MyCamera.MV_CC_DEVICE_INFO)Marshal.PtrToStructure(m_pDeviceList.pDeviceInfo[i], typeof(MyCamera.MV_CC_DEVICE_INFO));//网口相机if (device.nTLayerType == MyCamera.MV_GIGE_DEVICE){IntPtr buffer = Marshal.UnsafeAddrOfPinnedArrayElement(device.SpecialInfo.stGigEInfo, 0);MyCamera.MV_GIGE_DEVICE_INFO gigeInfo = (MyCamera.MV_GIGE_DEVICE_INFO)Marshal.PtrToStructure(buffer, typeof(MyCamera.MV_GIGE_DEVICE_INFO));if (gigeInfo.chUserDefinedName != ""){Console.WriteLine("GigE: " + gigeInfo.chUserDefinedName + " (" + gigeInfo.chSerialNumber + ")");CamerName.Add(gigeInfo.chSerialNumber);}else{Console.WriteLine("GigE: " + gigeInfo.chManufacturerName + " " + gigeInfo.chModelName + " (" + gigeInfo.chSerialNumber + ")");}}//usb接口相机else if (device.nTLayerType == MyCamera.MV_USB_DEVICE){IntPtr buffer = Marshal.UnsafeAddrOfPinnedArrayElement(device.SpecialInfo.stUsb3VInfo, 0);MyCamera.MV_USB3_DEVICE_INFO usbInfo = (MyCamera.MV_USB3_DEVICE_INFO)Marshal.PtrToStructure(buffer, typeof(MyCamera.MV_USB3_DEVICE_INFO));if (usbInfo.chUserDefinedName != ""){Console.WriteLine("USB: " + usbInfo.chUserDefinedName + " (" + usbInfo.chSerialNumber + ")");}else{Console.WriteLine("USB: " + usbInfo.chManufacturerName + " " + usbInfo.chModelName + " (" + usbInfo.chSerialNumber + ")");}}}if (m_pDeviceList.nDeviceNum == 0){Console.WriteLine("未找到USB或者网口相机", 0);return null;}return CamerName;}/// <summary>/// 根据相机序列号开启相机/// </summary>/// <param name="CamerSerialization"></param>/// <returns></returns>public override bool OpenCamer(string CamerSerialization){int nRet = 0;for (int i = 0; i < m_pDeviceList.pDeviceInfo.Length; i++){device = (MyCamera.MV_CC_DEVICE_INFO)Marshal.PtrToStructure(m_pDeviceList.pDeviceInfo[i], typeof(MyCamera.MV_CC_DEVICE_INFO));IntPtr buffer = Marshal.UnsafeAddrOfPinnedArrayElement(device.SpecialInfo.stGigEInfo, 0);MyCamera.MV_GIGE_DEVICE_INFO gigeInfo = (MyCamera.MV_GIGE_DEVICE_INFO)Marshal.PtrToStructure(buffer, typeof(MyCamera.MV_GIGE_DEVICE_INFO));if (gigeInfo.chSerialNumber== CamerSerialization){break;}}// ch:打开设备 | en:Open deviceif (null == HKMyCamera){HKMyCamera = new MyCamera();if (null == HKMyCamera){return false;}}//循环执行1000次,用于连接相机for (int i = 0; i < 10; i++){nRet = HKMyCamera.MV_CC_CreateDevice_NET(ref device);if (MyCamera.MV_OK != nRet){Thread.Sleep(1);//输出错误信息if (i == 9) Console.WriteLine("创建相机失败! {0:x8}", nRet);continue;}nRet = HKMyCamera.MV_CC_OpenDevice_NET();if (MyCamera.MV_OK != nRet){HKMyCamera.MV_CC_DestroyDevice_NET();Thread.Sleep(10);if (i == 9) Console.WriteLine("打开相机失败! {0:x8}", nRet);}else{break;}}// ch:探测网络最佳包大小(只对GigE相机有效) if (device.nTLayerType == MyCamera.MV_GIGE_DEVICE){int nPacketSize = HKMyCamera.MV_CC_GetOptimalPacketSize_NET();if (nPacketSize > 0){nRet = HKMyCamera.MV_CC_SetIntValue_NET("GevSCPSPacketSize", (uint)nPacketSize);if (nRet != MyCamera.MV_OK){Console.WriteLine("Warning: Set Packet Size failed {0:x8}", nRet);}}else{Console.WriteLine("Warning: Get Packet Size failed {0:x8}", nPacketSize);}}//注册断线重连回调函数nRet = HKMyCamera.MV_CC_RegisterExceptionCallBack_NET(pCallBackFunc, IntPtr.Zero);if (MyCamera.MV_OK != nRet){//ShowErrorMsg("Register expection callback failed!", nRet);return false;}GC.KeepAlive(pCallBackFunc);//注册图像回调函数ImageCallback = new MyCamera.cbOutputExdelegate(ImageCallbackFunc);nRet = HKMyCamera.MV_CC_RegisterImageCallBackEx_NET(ImageCallback, IntPtr.Zero);if (MyCamera.MV_OK != nRet){Console.WriteLine("Register image callback failed!");return false;}//设置开启触发模式HKMyCamera.MV_CC_SetEnumValue_NET("TriggerMode", (uint)MyCamera.MV_CAM_TRIGGER_MODE.MV_TRIGGER_MODE_ON);//设置开启软触发模式HKMyCamera.MV_CC_SetEnumValue_NET("TriggerSource", (uint)MyCamera.MV_CAM_TRIGGER_SOURCE.MV_TRIGGER_SOURCE_SOFTWARE);//使用软触发命令nRet = HKMyCamera.MV_CC_SetCommandValue_NET("TriggerSoftware");if (MyCamera.MV_OK != nRet){m_bGrabbing = false;// ShowErrorMsg("Start Grabbing Fail!", nRet);return false;}// ch:开始采集 nRet = HKMyCamera.MV_CC_StartGrabbing_NET();if (MyCamera.MV_OK != nRet){Console.WriteLine("开启相机采集失败! {0:x8}", nRet);return false;}Console.WriteLine("开启相机成功");return true;}/// <summary>/// 相机重连开启/// </summary>/// <param name="nMsgType"></param>/// <param name="pUser"></param>public override bool ReconnectCamer(string CamerName){CloseCamer( );for (int j = 0; j < m_pDeviceList.pDeviceInfo.Length; j++){device = (MyCamera.MV_CC_DEVICE_INFO)Marshal.PtrToStructure(m_pDeviceList.pDeviceInfo[j], typeof(MyCamera.MV_CC_DEVICE_INFO));IntPtr buffer = Marshal.UnsafeAddrOfPinnedArrayElement(device.SpecialInfo.stGigEInfo, 0);MyCamera.MV_GIGE_DEVICE_INFO gigeInfo = (MyCamera.MV_GIGE_DEVICE_INFO)Marshal.PtrToStructure(buffer, typeof(MyCamera.MV_GIGE_DEVICE_INFO));if (gigeInfo.chSerialNumber == CamerName){break;}}int i = 0;// ch:打开设备 | en:Open Devicewhile (true){int nRet = HKMyCamera.MV_CC_CreateDevice_NET(ref device);i++;//防止重连超时卡死if (i > 10000){Console.WriteLine("相机重连超时,请检查相机安装");nRet = -1;break;}if (MyCamera.MV_OK != nRet){Thread.Sleep(5);continue;}nRet = HKMyCamera.MV_CC_OpenDevice_NET();if (MyCamera.MV_OK != nRet){Thread.Sleep(5);HKMyCamera.MV_CC_DestroyDevice_NET();continue;}else{//nRet = InitCamera();if (MyCamera.MV_OK != nRet){Thread.Sleep(5);HKMyCamera.MV_CC_DestroyDevice_NET();continue;}break;}}return true;}/// <summary>/// 清空相机/// </summary>public override bool CloseCamer(){// ch:停止采集 | en:Stop GrabbingHKMyCamera.MV_CC_StopGrabbing_NET();// ch:关闭设备 | en:Close DeviceHKMyCamera.MV_CC_CloseDevice_NET();HKMyCamera.MV_CC_DestroyDevice_NET();return true;}//回调图像传出变量void ImageCallbackFunc(IntPtr pData, ref MyCamera.MV_FRAME_OUT_INFO_EX pFrameInfo, IntPtr pUser){Halcon_Image(pData, ref pFrameInfo, pUser);}public void Halcon_Image(IntPtr pData, ref MyCamera.MV_FRAME_OUT_INFO_EX pFrameInfo, IntPtr pUser){int nRet;HObject img = new HObject();IntPtr pImageBuf = IntPtr.Zero;int nImageBufSize = 0;IntPtr pTemp = IntPtr.Zero;if (IsColorPixelFormat(pFrameInfo.enPixelType)){if (pFrameInfo.enPixelType == MyCamera.MvGvspPixelType.PixelType_Gvsp_RGB8_Packed){pTemp = pData;}else{if (IntPtr.Zero == pImageBuf || nImageBufSize < (pFrameInfo.nWidth * pFrameInfo.nHeight * 3)){if (pImageBuf != IntPtr.Zero){Marshal.FreeHGlobal(pImageBuf);pImageBuf = IntPtr.Zero;}pImageBuf = Marshal.AllocHGlobal((int)pFrameInfo.nWidth * pFrameInfo.nHeight * 3);if (IntPtr.Zero == pImageBuf){Console.WriteLine("图像采集为空");return;}nImageBufSize = pFrameInfo.nWidth * pFrameInfo.nHeight * 3;}MyCamera.MV_PIXEL_CONVERT_PARAM stPixelConvertParam = new MyCamera.MV_PIXEL_CONVERT_PARAM();stPixelConvertParam.pSrcData = pData;//源数据stPixelConvertParam.nWidth = pFrameInfo.nWidth;//图像宽度stPixelConvertParam.nHeight = pFrameInfo.nHeight;//图像高度stPixelConvertParam.enSrcPixelType = pFrameInfo.enPixelType;//源数据的格式stPixelConvertParam.nSrcDataLen = pFrameInfo.nFrameLen;stPixelConvertParam.nDstBufferSize = (uint)nImageBufSize;stPixelConvertParam.pDstBuffer = pImageBuf;//转换后的数据stPixelConvertParam.enDstPixelType = MyCamera.MvGvspPixelType.PixelType_Gvsp_RGB8_Packed;nRet = HKMyCamera.MV_CC_ConvertPixelType_NET(ref stPixelConvertParam);//格式转换if (MyCamera.MV_OK != nRet){Console.WriteLine("图像转换异常");return;}pTemp = stPixelConvertParam.pDstBuffer;}try{HOperatorSet.GenImageInterleaved(out hPylonImage, (HTuple)pTemp, (HTuple)"rgb", (HTuple)pFrameInfo.nWidth, (HTuple)pFrameInfo.nHeight, -1, "byte", 0, 0, 0, 0, -1, 0);}catch (System.Exception ex){Console.WriteLine(ex.ToString());return;}}else if (IsMonoPixelFormat(pFrameInfo.enPixelType)){if (pFrameInfo.enPixelType == MyCamera.MvGvspPixelType.PixelType_Gvsp_Mono8){pTemp = pData;}else{if (IntPtr.Zero == pImageBuf || nImageBufSize < (pFrameInfo.nWidth * pFrameInfo.nHeight)){if (pImageBuf != IntPtr.Zero){Marshal.FreeHGlobal(pImageBuf);pImageBuf = IntPtr.Zero;}pImageBuf = Marshal.AllocHGlobal((int)pFrameInfo.nWidth * pFrameInfo.nHeight);if (IntPtr.Zero == pImageBuf){Console.WriteLine("图像采集为空");return;}nImageBufSize = pFrameInfo.nWidth * pFrameInfo.nHeight;}MyCamera.MV_PIXEL_CONVERT_PARAM stPixelConvertParam = new MyCamera.MV_PIXEL_CONVERT_PARAM();stPixelConvertParam.pSrcData = pData;//源数据stPixelConvertParam.nWidth = pFrameInfo.nWidth;//图像宽度stPixelConvertParam.nHeight = pFrameInfo.nHeight;//图像高度stPixelConvertParam.enSrcPixelType = pFrameInfo.enPixelType;//源数据的格式stPixelConvertParam.nSrcDataLen = pFrameInfo.nFrameLen;stPixelConvertParam.nDstBufferSize = (uint)nImageBufSize;stPixelConvertParam.pDstBuffer = pImageBuf;//转换后的数据stPixelConvertParam.enDstPixelType = MyCamera.MvGvspPixelType.PixelType_Gvsp_Mono8;nRet = HKMyCamera.MV_CC_ConvertPixelType_NET(ref stPixelConvertParam);//格式转换if (MyCamera.MV_OK != nRet){Console.WriteLine("图像转换异常");return;}pTemp = stPixelConvertParam.pDstBuffer; ;}try{HOperatorSet.GenImage1Extern(out hPylonImage, "byte", pFrameInfo.nWidth, pFrameInfo.nHeight, pTemp, IntPtr.Zero);}catch (System.Exception ex){MessageBox.Show(ex.ToString());return;}}else{Console.WriteLine("采集图像格式错误,不为彩色和黑白图像");return;}try{GetImage(hPylonImage);//调用相机基类的函数,用于传出变量hPylonImage.Dispose();m_bGrabbing = false;}catch (Exception e){Console.WriteLine(e.ToString());return;}}/// <summary>/// 设置相机曝光/// </summary>/// <param name="ExposureTime"></param>/// <returns></returns>public override bool SetExposureTime(int ExposureTime){try{HKMyCamera.MV_CC_SetEnumValue_NET("ExposureAuto", 0);int nRet = HKMyCamera.MV_CC_SetFloatValue_NET("ExposureTime", ExposureTime);if (nRet != MyCamera.MV_OK){return false;}return true;}catch (Exception){return false;}}/// <summary>/// 设置Gige相机心跳时间/// </summary>/// <param name="value"></param>public void SetHeartBeatTime(uint value){try{//判断是否是网口相机if (device.nTLayerType == MyCamera.MV_GIGE_DEVICE){HKMyCamera.MV_CC_SetHeartBeatTimeout_NET(value);}}catch (Exception){}}bool m_bGrabbing = false;/// <summary>/// 单张采集/// </summary>public override bool OneGrap(){try{if (m_bGrabbing){Console.WriteLine("Camera is now Continue Grabing Images!");return false;}else{// ch:标志位置位true | en:Set position bit truem_bGrabbing = true;//设置开启触发模式HKMyCamera.MV_CC_SetEnumValue_NET("TriggerMode", (uint)MyCamera.MV_CAM_TRIGGER_MODE.MV_TRIGGER_MODE_ON);//设置开启软触发模式HKMyCamera.MV_CC_SetEnumValue_NET("TriggerSource", (uint)MyCamera.MV_CAM_TRIGGER_SOURCE.MV_TRIGGER_SOURCE_SOFTWARE);int nRet;//使用软触发命令nRet = HKMyCamera.MV_CC_SetCommandValue_NET("TriggerSoftware");if (MyCamera.MV_OK != nRet){m_bGrabbing = false;return false;}// HeventSlim.Wait();return true;}}catch (Exception){return false;}}/// <summary>/// 开启硬触发/// </summary>/// <returns></returns>public override bool EncoderGrap(){try{if (m_bGrabbing){Console.WriteLine("Camera is now Continue Grabing Images!");return false;}else{// ch:标志位置位true | en:Set position bit truem_bGrabbing = true;HKMyCamera.MV_CC_SetEnumValue_NET("TriggerMode", (uint)MyCamera.MV_CAM_TRIGGER_MODE.MV_TRIGGER_MODE_ON);//设置使用硬触发模式int nRet = HKMyCamera.MV_CC_SetEnumValue_NET("TriggerSource", (uint)MyCamera.MV_CAM_TRIGGER_SOURCE.MV_TRIGGER_SOURCE_LINE0);if (MyCamera.MV_OK != nRet){m_bGrabbing = false;return false;}return true;}}catch (Exception){return false;}}/// <summary>/// 判断是否为彩色图像/// </summary>/// <param name="enType"></param>/// <returns></returns>private bool IsColorPixelFormat(MyCamera.MvGvspPixelType enType){switch (enType){case MyCamera.MvGvspPixelType.PixelType_Gvsp_RGB8_Packed:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BGR8_Packed:case MyCamera.MvGvspPixelType.PixelType_Gvsp_RGBA8_Packed:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BGRA8_Packed:case MyCamera.MvGvspPixelType.PixelType_Gvsp_YUV422_Packed:case MyCamera.MvGvspPixelType.PixelType_Gvsp_YUV422_YUYV_Packed:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerGR8:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerRG8:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerGB8:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerBG8:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerGB10:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerGB10_Packed:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerBG10:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerBG10_Packed:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerRG10:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerRG10_Packed:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerGR10:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerGR10_Packed:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerGB12:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerGB12_Packed:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerBG12:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerBG12_Packed:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerRG12:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerRG12_Packed:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerGR12:case MyCamera.MvGvspPixelType.PixelType_Gvsp_BayerGR12_Packed:return true;default:return false;}}/// <summary>/// 判断图像是否是黑白图像/// </summary>/// <param name="enType"></param>/// <returns></returns>private bool IsMonoPixelFormat(MyCamera.MvGvspPixelType enType){switch (enType){case MyCamera.MvGvspPixelType.PixelType_Gvsp_Mono8:case MyCamera.MvGvspPixelType.PixelType_Gvsp_Mono10:case MyCamera.MvGvspPixelType.PixelType_Gvsp_Mono10_Packed:case MyCamera.MvGvspPixelType.PixelType_Gvsp_Mono12:case MyCamera.MvGvspPixelType.PixelType_Gvsp_Mono12_Packed:return true;default:return false;}}}
}整体过程其实比较简单,由于海康相机没有像一些品牌相机一样可以直接使用序列号开启相机,所以我们需要通过对相机信息进行索引,根据索引到的相机序列号来开启相机。
如何显示图像:可以访问我文章开头的博客,通过编写相机通用类即可,程序中是有继承通用类,通过访问相机通用的获取图像数据,从而传输图像数据。具体可以查看相机通用类。
相关文章:
,并输出halcon格式对象)
相机通用类之海康相机,软触发硬触发(飞拍),并输出halcon格式对象
//在此之前可以先浏览我编写的通用上位机类,更方便理解 https://blog.csdn.net/m0_51559565/article/details/134403745最近完成一个关于海康采图的demo,记录并说明用法。 先上代码。using System; using System.Collections.Generic; using System.Runt…...

linux时间调整
查看当前系统时间 [rootVM-12-12-centos ~]# date Sat Nov 18 16:09:11 CST 2023 Sat:表示星期六Saturday的缩写 Nov:表示十一月November的缩写 18:表示日期18号 16:09:11:时间 CST:China Standard Time中国标准…...

C++模版初阶
泛型编程 如下的交换函数中,它们只有类型的不同,应该怎么实现一个通用的交换函数呢? void Swap(int& left, int& right) {int temp left;left right;right temp; }void Swap(double& left, double& right) {double temp…...
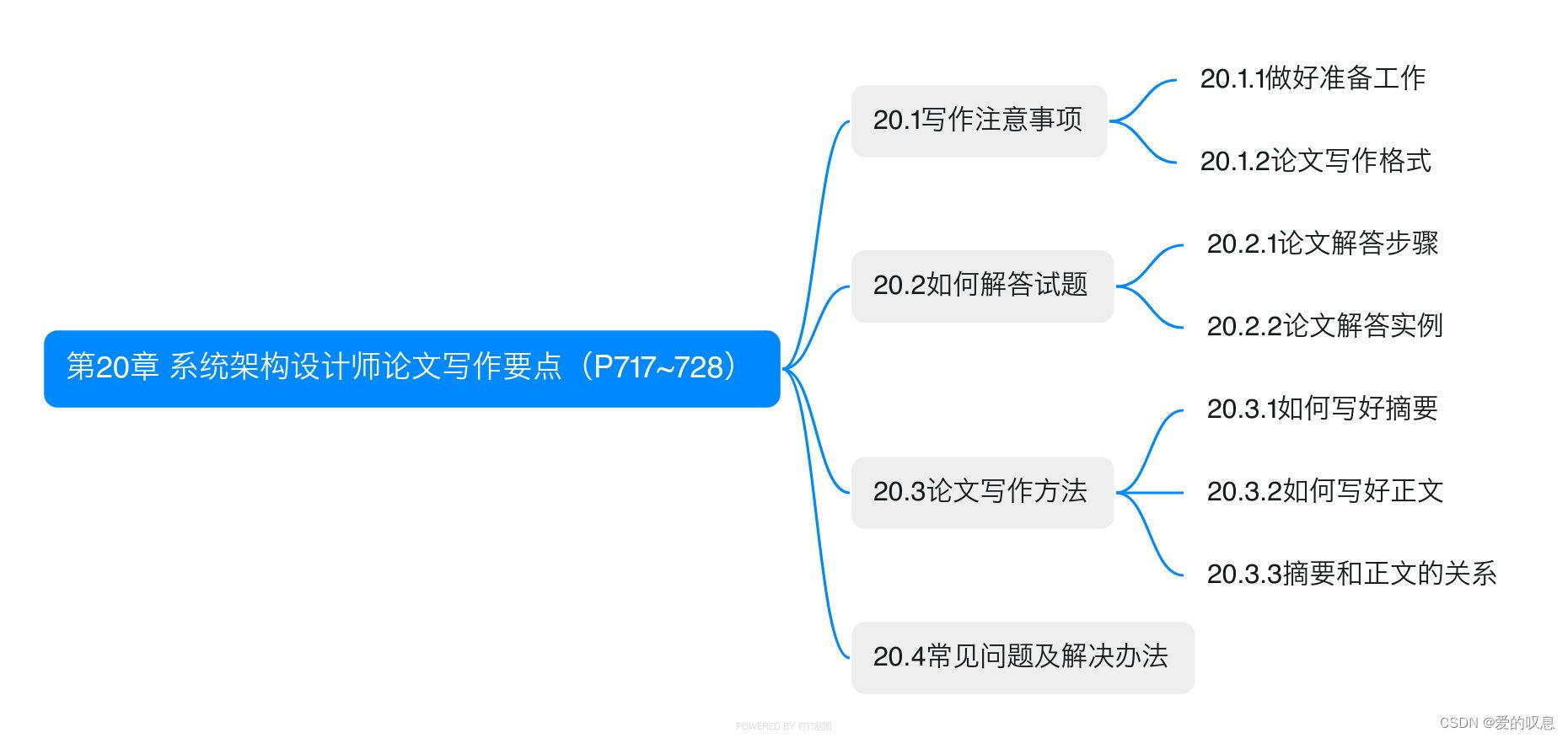
软考-高级-系统架构设计师教程(清华第2版)【第20章 系统架构设计师论文写作要点(P717~728)-思维导图】
软考-高级-系统架构设计师教程(清华第2版)【第20章 系统架构设计师论文写作要点(P717~728)-思维导图】 课本里章节里所有蓝色字体的思维导图...

Go 语言结构体验证详解:validate 标签与自定义规则
介绍 Go 语言中,结构体验证是保障数据完整性和正确性的重要手段之一。本文将深入探讨 validate 标签的使用方式,并介绍如何结合验证库 go-playground/validator 进行自定义验证规则。 安装与导入验证库 首先,请确保已安装验证库:…...
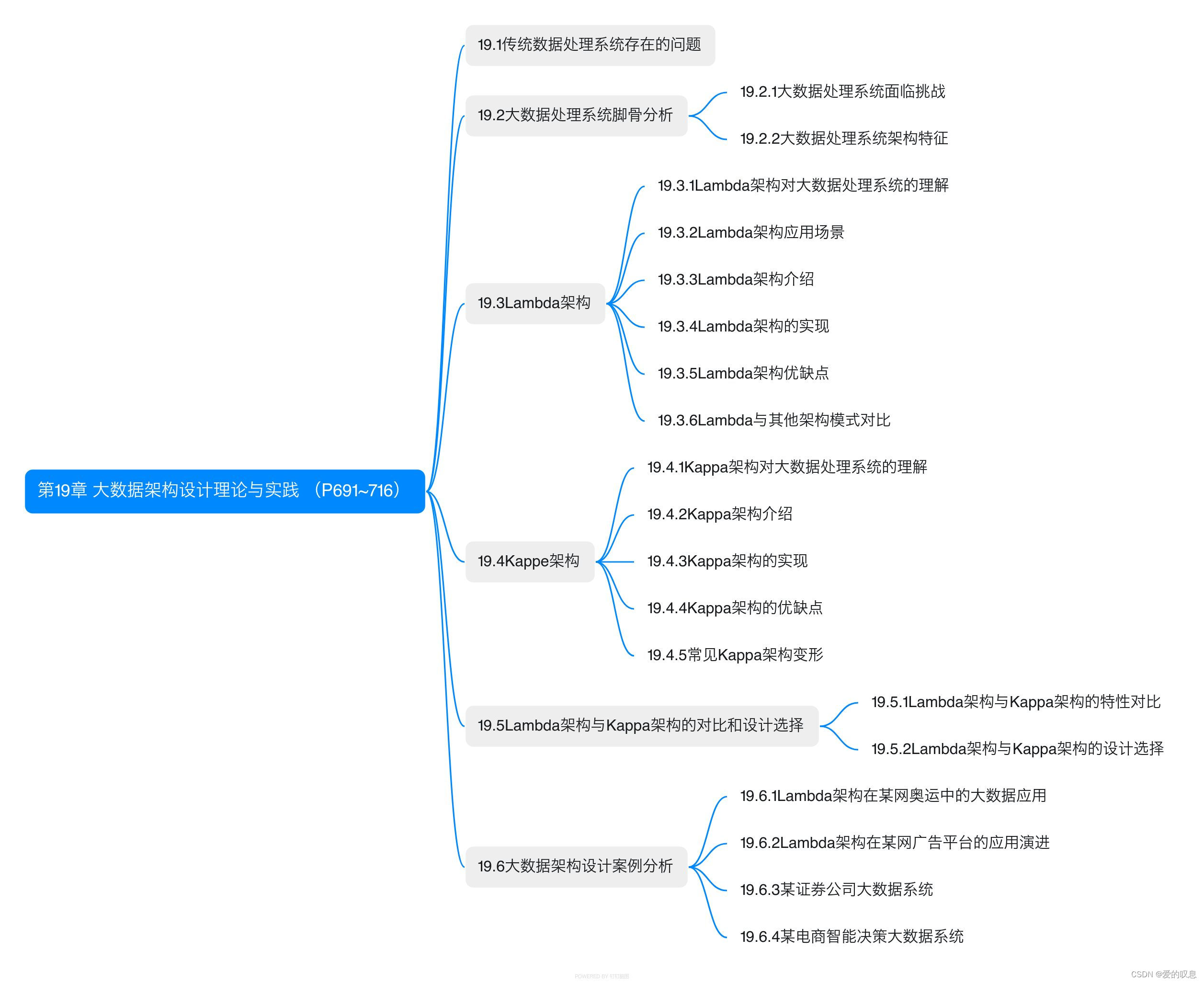
软考-高级-系统架构设计师教程(清华第2版)【第19章 大数据架构设计理论与实践 (P691~716)-思维导图】
软考-高级-系统架构设计师教程(清华第2版)【第19章 大数据架构设计理论与实践 (P691~716)-思维导图】 课本里章节里所有蓝色字体的思维导图...

深度学习YOLOv5车辆颜色识别检测 - python opencv 计算机竞赛
文章目录 1 前言2 实现效果3 CNN卷积神经网络4 Yolov56 数据集处理及模型训练5 最后 1 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 **基于深度学习YOLOv5车辆颜色识别检测 ** 该项目较为新颖,适合作为竞赛课题方向࿰…...
c语言-浅谈指针(3)
文章目录 1.字符指针变量常见的字符指针初始化另一种字符指针初始化例: 2.数组指针变量什么是数组指针变量数组指针变量创建数组指针变量初始化例(二维数组传参的本质) 3.函数指针变量什么是函数指针变量呢?函数指针变量创建函数指…...

从服务器端获取人脸数据,在本地检测特征,并将特征发送给服务器
目录 1.定义函数get_database_process: 2.定义函数features_construct: 3.定义函数send_features_data: 4. 定义函数database_features_construct: 5. main 函数 1.定义函数get_database_process: …...
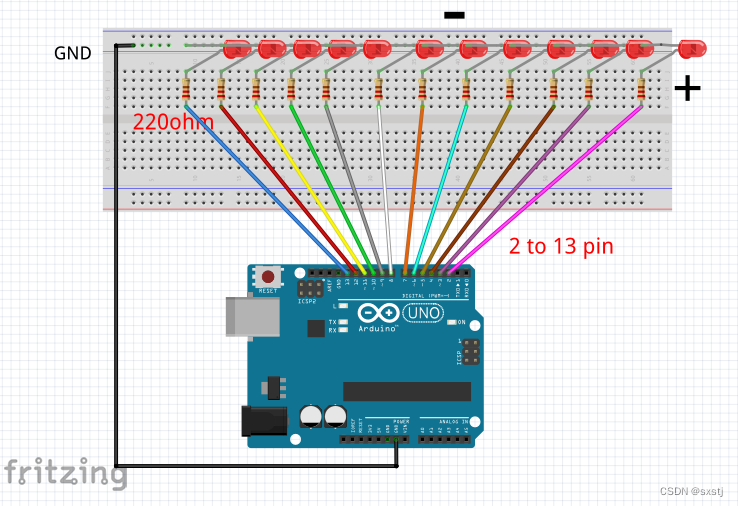
ARDUINO UNO 12颗LED超酷流水灯效果
效果代码: #define t 30 #define t1 20 #define t2 100 #define t3 50 void setup() { // set up pins 2 to 13 as outputs for (int i 2; i < 13; i) { pinMode(i, OUTPUT); } } /Effect 1 void loop() { effect_1(); effect_1(); effect_…...

Linux下查看pytorch运行时真正调用的cuda版本
一般情况我们会安装使用多个cuda版本。而且pytorch在安装时也会自动安装一个对应的版本。 正确查看方式: 想要查看 Pytorch 实际使用的运行时的 cuda 目录,可以直接输出 cpp_extension.py 中的 CUDA_HOME 变量。 import torch import torch.utils imp…...

分享mfc140u.dll丢失的解决方法,针对原因解决mfc140u.dll丢失的问题
作为电脑小白,如果电脑中出现了mfc140u.dll丢失的问题,肯定会比较的慌乱。但是出现mfc140u.dll丢失的问题,其实也有很简单的办法,所以大家不用慌张,接下来就教大家解决办法,能够有效的解决mfc140u.dll丢失的…...
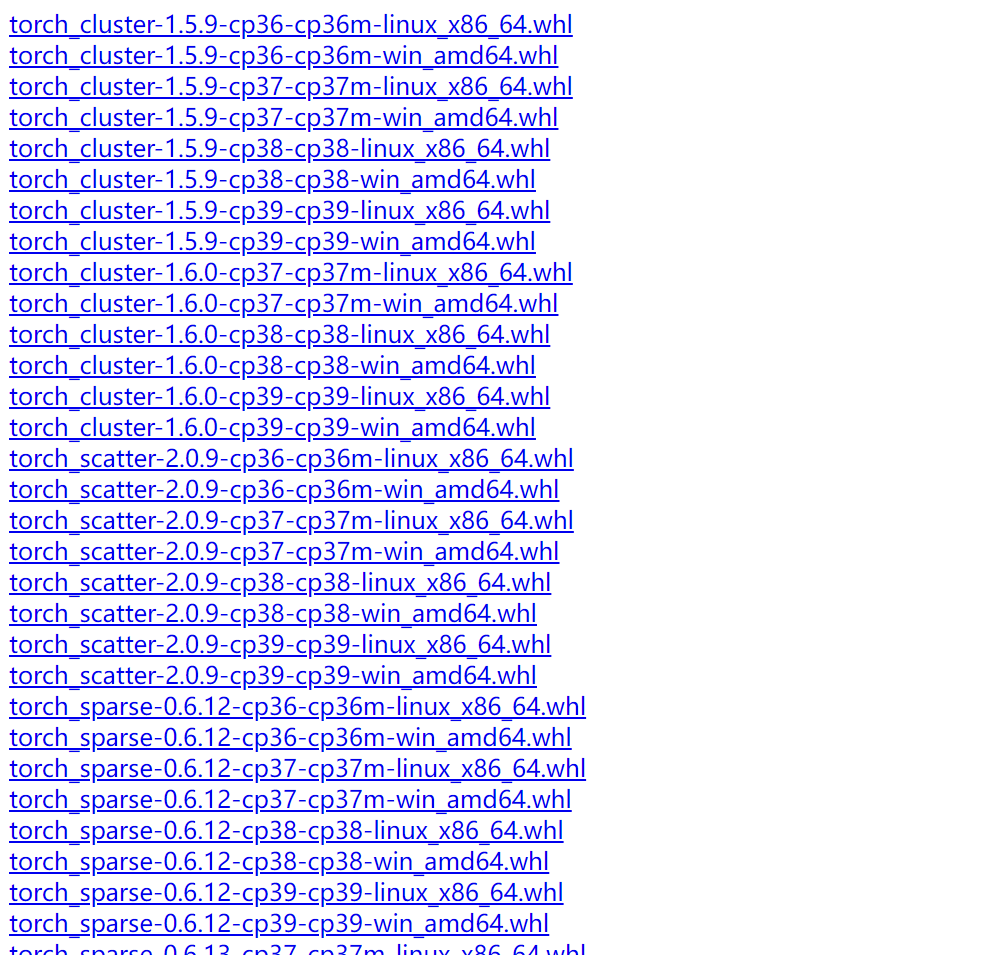
torch_cluster、torch_scatter、torch_sparse三个包的安装
涉及到下面几个包安装的时候经常会出现问题,这里我使用先下载然后再安装的办法: pip install torch_cluster pip install torch_scatter pip install torch_sparse 1、选择你对应的torch版本:https://data.pyg.org/whl/ 2、点进去然后&…...
软件安利——火绒安全
近年来,以优化、驱动、管理为目标所打造的软件屡见不鲜,大同小异的电脑管家相继走入了公众的视野。然而,在这日益急功近利的社会氛围驱动之下,真正坚持初心、优先考虑用户体验的电脑管家逐渐湮没在了浪潮之中。无论是鲁大师&#…...

Induced AI:一个专门为自动化任务而设计的AI原生浏览器RPA平台
内容来源:xiaohuggg Induced AI:一个专门为自动化任务而设计的AI原生浏览器RPA平台 刚刚获得OpenAI CEOsama的个人投资! 它能够模拟人类浏览网页的行为,自动化地浏览网页,搜集关键信息,并对这些信息进行…...
)
vue3中使用reactive定义的变量响应式丢失问题(大坑!!!)
前言 在Vue 3中,可以使用reactive函数将普通JavaScript对象转换为响应式对象,这样当对象的属性发生变化时,就会自动更新相应的UI。 但是请注意以下情况可能会丢失数据的响应式: 响应式丢失的情况: 1、对使用reactiv…...

Windows Server 2012 R2系统服务器远程桌面服务多用户登录配置分享
Windows Server 2012系统在没有安装远程多界面的情况下,最多只能同时运行2个远程桌面,如果是有多个技术员、合伙人同时操作或是像游戏开发需要用到多界面,但是没有安装就很不方便,今天飞飞来和你们分享Windows server 2012R2系统远…...
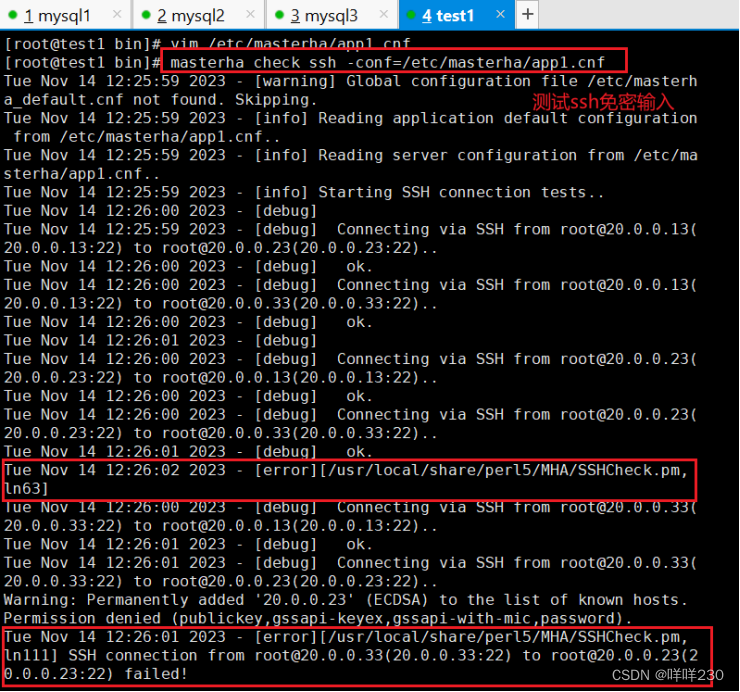
mysql之搭建MHA架构实现高可用
1、定义 全称是masterhigh avaliabulity。基于主库的高可用环境下可以实现主从复制及故障切换(基于主从复制才能故障切换) MHA最少要求一主两从,半同步复制模式 2、作用 解决mysql的单点故障问题。一旦主库崩溃,MHA可以在0-30…...
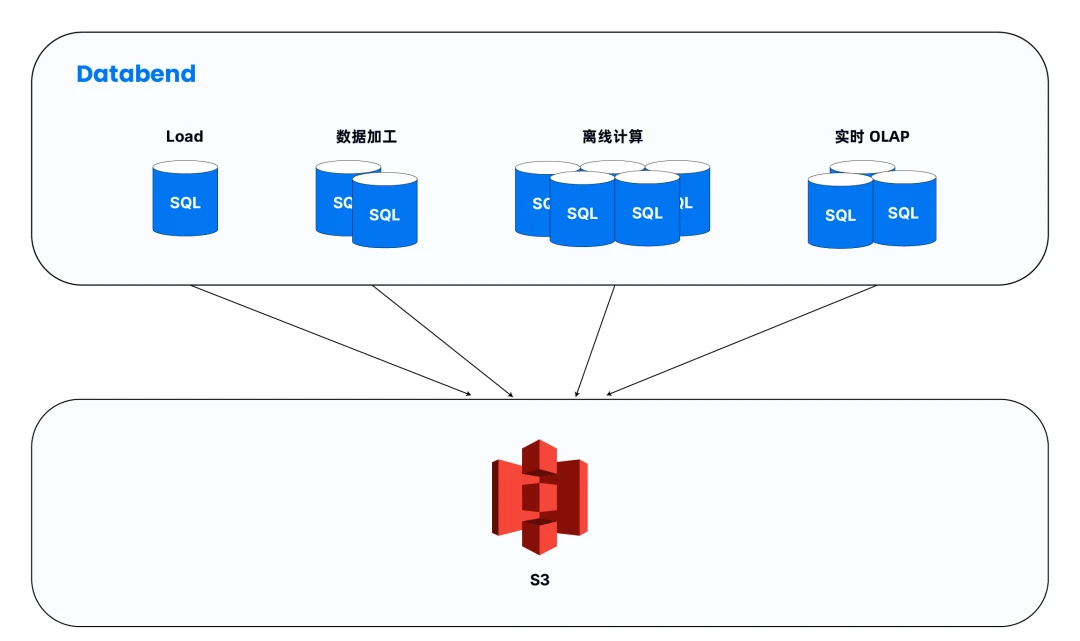
Databend 与海外某电信签约:共创海外电信数据仓库新纪元
为什么选择 Databend 海外某电信面临的主要挑战是随着业务量的增加,传统的 Clickhouse Hive 方案在数据存储和处理上开始显露不足。 原来的大数据分析采用的 Clickhouse Hive 方案进行离线的实时报表。但随着业务量的上升后,Hive的数据存储压力变大&…...

scala解析命令行参数
如何用scala解析命令行参数: 首先,需要在项目中添加Apache Commons CLI库的依赖。可以在build.sbt文件中添加如下行: libraryDependencies "commons-cli" % "commons-cli" % "1.4" import org.apache.comm…...

StructBERT中文情感模型API集成实战:对接企业微信/钉钉通知系统
StructBERT中文情感模型API集成实战:对接企业微信/钉钉通知系统 1. 项目概述与核心价值 StructBERT中文情感分析模型是百度基于StructBERT预训练模型微调后的经典模型,专门用于识别中文文本的情感倾向(正面/负面/中性)。这个模型…...

Pinocchio机器人动力学库在不同开发环境下的安装与配置指南
1. Pinocchio机器人动力学库简介 Pinocchio是一个开源的机器人动力学计算库,专门用于高效计算多体系统的运动学和动力学特性。我第一次接触这个库是在开发六轴机械臂控制项目时,当时需要快速计算关节空间到任务空间的转换关系。相比其他动力学库…...

OWL ADVENTURE多模态模型快速上手:环境验证+测试脚本,30分钟跑通全流程
OWL ADVENTURE多模态模型快速上手:环境验证测试脚本,30分钟跑通全流程 1. 环境准备:检查你的基础配置 在开始OWL ADVENTURE的探索之旅前,我们需要确保你的开发环境已经准备就绪。这个步骤就像出发前检查装备,确保不会…...

Phi-3 Forest Lab多场景落地:教育问答、代码辅导、文档摘要三合一实践
Phi-3 Forest Lab多场景落地:教育问答、代码辅导、文档摘要三合一实践 1. 引言:当AI遇见森林美学 在数字世界的喧嚣中,我们创造了一个与众不同的AI对话空间——Phi-3 Forest Lab。这个项目将微软Phi-3 Mini 128K Instruct模型的强大能力&am…...

避开这些坑!RK3568 Android11分区表配置指南:parameter.txt的MTD分区定义详解
RK3568 Android11分区表配置实战:parameter.txt的MTD分区避坑手册 当你在RK3568平台上定制Android11系统时,parameter.txt文件就像是一张精密的电路图,任何一个错误的布线都可能导致系统无法启动。这份文件不仅仅是简单的配置清单,…...

Tomcat安装配置全攻略
好的!以下是一份详细的 Tomcat 安装及配置教程,适用于 Windows 和 Linux 系统,涵盖基础安装、环境配置、常见问题解决及优化建议。 一、准备工作 安装 JDK Tomcat 依赖 Java 环境,需先安装 JDK(推荐 JDK 8)…...

AI专著写作工具大揭秘,快速产出高质量专著不是梦
学术专著创作难题与AI工具助力 对于许多研究者来说,撰写学术专著时面临的最大挑战,无疑是“有限的精力”和“无限的需求”之间的矛盾。专著的创作通常需要三到五年,甚至更长的时间,而研究者们日常需要应对教学、科研项目及学术交…...

YOLOV8模型衣物皮革类 布匹织物瑕疵数据集 2115张,6种瑕疵类型 json格式与yolo格式标签 目标检测 深度学习
,使用YOLOv8训练布匹织物瑕疵数据集。我们将从数据准备、模型训练、评估和可视化等方面详细介绍整个流程。此外,我们还会提供一些常用的自动脚本,帮助你进行数据预处理和探索性数据分析(EDA)。1. 环境准备 首先&#x…...

bypass-mdm-v2对比v1:自动UID冲突检测如何提升成功率?
bypass-mdm-v2对比v1:自动UID冲突检测如何提升成功率? 【免费下载链接】bypass-mdm Bypass MDM Setup for MacOS, up to Sonoma 14.4.1 (23E224). 项目地址: https://gitcode.com/gh_mirrors/byp/bypass-mdm bypass-mdm是一款专为macOS设计的MDM绕…...

如何实现Reddit移动适配:响应式设计与移动API优化完整指南
如何实现Reddit移动适配:响应式设计与移动API优化完整指南 【免费下载链接】reddit 项目地址: https://gitcode.com/gh_mirrors/red/reddit GitHub加速计划中的red/reddit项目是一个备受欢迎的开源社区平台,为全球用户提供内容分享和交流服务。随…...