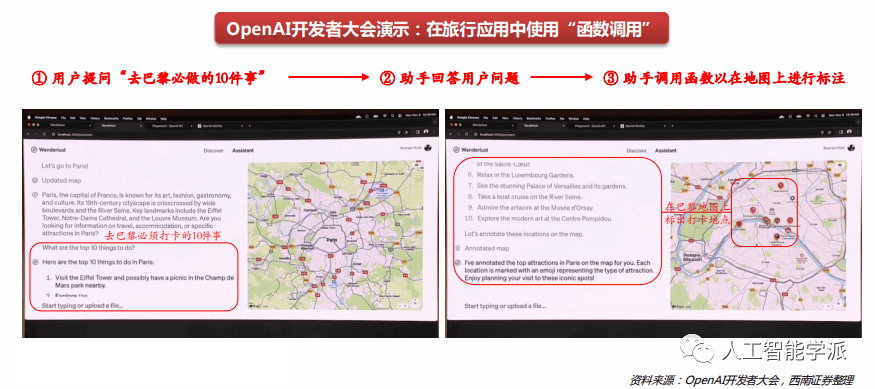
stm32mp157和imx6ull在设备树节点上设置ap3216c的主要区别
stm32mp157和imx6ull在设备树节点上设置ap3216c的主要区别是,它们使用的不同的硬件架构和不同的设备树格式。以下是两者之间的差异:
硬件架构:stm32mp157是基于ARM Cortex-M4内核的微控制器,而imx6ull则是基于ARM Cortex-A7内核的嵌入式处理器。
设备树格式:stm32mp157使用的设备树格式是Device Tree Compiler(DTC)格式,而imx6ull使用的是Flattened Device Tree(FDT)格式。
基于这些差异,设置ap3216c的设备树节点在两者之间有一些细微的差异。以下是一个示例:
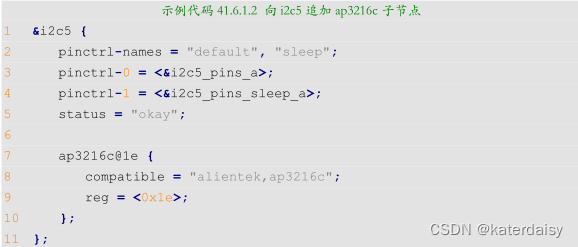
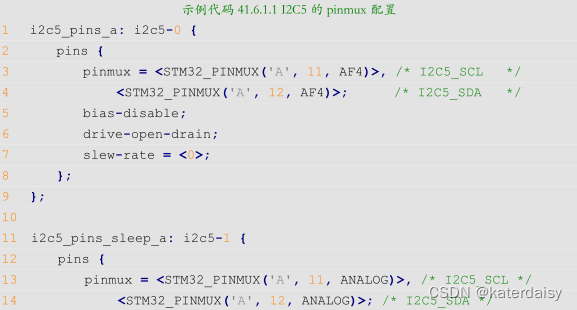
stm32mp157设备树节点示例:

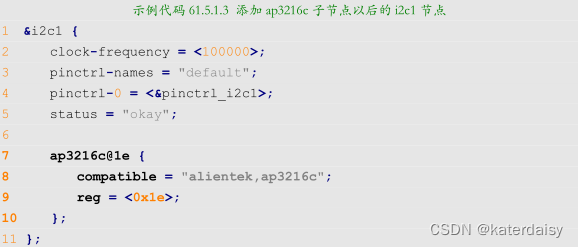
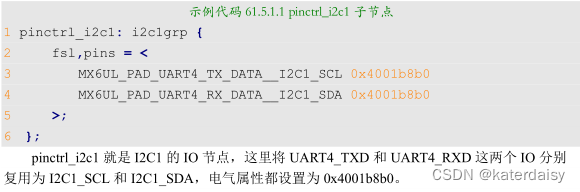
imx6ull设备树节点示例:
注意,在这两个示例中,ap3216c节点的名称和compatible属性都相同。
总体上来说,stm32mp157和imx6ull之间的差异在于它们所用的硬件架构和设备树格式,但在设置ap3216c设备树节点时,它们的区别不大。
备注:stm32mp157和imx6ull的ap3216c驱动是完全一样的,驱动代码如下:
ap3216creg.h:
#ifndef AP3216C_H
#define AP3216C_H
#define AP3216C_ADDR 0X1E /* AP3216C器件地址 */
/* AP3316C寄存器 /
#define AP3216C_SYSTEMCONG 0x00 / 配置寄存器 /
#define AP3216C_INTSTATUS 0X01 / 中断状态寄存器 /
#define AP3216C_INTCLEAR 0X02 / 中断清除寄存器 /
#define AP3216C_IRDATALOW 0x0A / IR数据低字节 /
#define AP3216C_IRDATAHIGH 0x0B / IR数据高字节 /
#define AP3216C_ALSDATALOW 0x0C / ALS数据低字节 /
#define AP3216C_ALSDATAHIGH 0X0D / ALS数据高字节 /
#define AP3216C_PSDATALOW 0X0E / PS数据低字节 /
#define AP3216C_PSDATAHIGH 0X0F / PS数据高字节 */
#endif
ap3216c.c:
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of_gpio.h>
#include <linux/semaphore.h>
#include <linux/timer.h>
#include <linux/i2c.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#include “ap3216creg.h”
#define AP3216C_CNT 1
#define AP3216C_NAME “ap3216c”
struct ap3216c_dev {
struct i2c_client client; / i2c 设备 /
dev_t devid; / 设备号 /
struct cdev cdev; / cdev */
struct class class; / 类 */
struct device device; / 设备 */
struct device_node nd; / 设备节点 /
unsigned short ir, als, ps; / 三个光传感器数据 */
};
/*
-
@description : 从ap3216c读取多个寄存器数据
-
@param - dev: ap3216c设备
-
@param - reg: 要读取的寄存器首地址
-
@param - val: 读取到的数据
-
@param - len: 要读取的数据长度
-
@return : 操作结果
*/
static int ap3216c_read_regs(struct ap3216c_dev *dev, u8 reg, void *val, int len)
{
int ret;
struct i2c_msg msg[2];
struct i2c_client *client = (struct i2c_client *)dev->client;/* msg[0]为发送要读取的首地址 /
msg[0].addr = client->addr; / ap3216c地址 /
msg[0].flags = 0; / 标记为发送数据 /
msg[0].buf = ® / 读取的首地址 /
msg[0].len = 1; / reg长度*//* msg[1]读取数据 /
msg[1].addr = client->addr; / ap3216c地址 /
msg[1].flags = I2C_M_RD; / 标记为读取数据*/
msg[1].buf = val; /* 读取数据缓冲区 /
msg[1].len = len; / 要读取的数据长度*/ret = i2c_transfer(client->adapter, msg, 2);
if(ret == 2) {
ret = 0;
} else {
printk(“i2c rd failed=%d reg=%06x len=%d\n”,ret, reg, len);
ret = -EREMOTEIO;
}
return ret;
}
/*
-
@description : 向ap3216c多个寄存器写入数据
-
@param - dev: ap3216c设备
-
@param - reg: 要写入的寄存器首地址
-
@param - val: 要写入的数据缓冲区
-
@param - len: 要写入的数据长度
-
@return : 操作结果
*/
static s32 ap3216c_write_regs(struct ap3216c_dev *dev, u8 reg, u8 *buf, u8 len)
{
u8 b[256];
struct i2c_msg msg;
struct i2c_client *client = (struct i2c_client *)dev->client;b[0] = reg; /* 寄存器首地址 /
memcpy(&b[1],buf,len); / 将要写入的数据拷贝到数组b里面 */msg.addr = client->addr; /* ap3216c地址 /
msg.flags = 0; / 标记为写数据 */msg.buf = b; /* 要写入的数据缓冲区 /
msg.len = len + 1; / 要写入的数据长度 */return i2c_transfer(client->adapter, &msg, 1);
}
/*
-
@description : 读取ap3216c指定寄存器值,读取一个寄存器
-
@param - dev: ap3216c设备
-
@param - reg: 要读取的寄存器
-
@return : 读取到的寄存器值
*/
static unsigned char ap3216c_read_reg(struct ap3216c_dev *dev, u8 reg)
{
u8 data = 0;ap3216c_read_regs(dev, reg, &data, 1);
return data;
}
/*
- @description : 向ap3216c指定寄存器写入指定的值,写一个寄存器
- @param - dev: ap3216c设备
- @param - reg: 要写的寄存器
- @param - data: 要写入的值
- @return : 无
*/
static void ap3216c_write_reg(struct ap3216c_dev *dev, u8 reg, u8 data)
{
u8 buf = 0;
buf = data;
ap3216c_write_regs(dev, reg, &buf, 1);
}
/*
-
@description : 读取AP3216C的数据,读取原始数据,包括ALS,PS和IR, 注意!
-
: 如果同时打开ALS,IR+PS的话两次数据读取的时间间隔要大于112.5ms -
@param - ir : ir数据
-
@param - ps : ps数据
-
@param - ps : als数据
-
@return : 无。
*/
void ap3216c_readdata(struct ap3216c_dev *dev)
{
unsigned char i =0;
unsigned char buf[6];/* 循环读取所有传感器数据 */
for(i = 0; i < 6; i++) {
buf[i] = ap3216c_read_reg(dev, AP3216C_IRDATALOW + i);
}if(buf[0] & 0X80) /* IR_OF位为1,则数据无效 /
dev->ir = 0;
else / 读取IR传感器的数据 */
dev->ir = ((unsigned short)buf[1] << 2) | (buf[0] & 0X03);dev->als = ((unsigned short)buf[3] << 8) | buf[2]; /* 读取ALS传感器的数据 */
if(buf[4] & 0x40) /* IR_OF位为1,则数据无效 /
dev->ps = 0;
else / 读取PS传感器的数据 */
dev->ps = ((unsigned short)(buf[5] & 0X3F) << 4) | (buf[4] & 0X0F);
}
/*
-
@description : 打开设备
-
@param - inode : 传递给驱动的inode
-
@param - filp : 设备文件,file结构体有个叫做private_data的成员变量
-
一般在open的时候将private_data指向设备结构体。 -
@return : 0 成功;其他 失败
*/
static int ap3216c_open(struct inode *inode, struct file filp)
{
/ 从file结构体获取cdev的指针,在根据cdev获取ap3216c_dev结构体的首地址 */
struct cdev *cdev = filp->f_path.dentry->d_inode->i_cdev;
struct ap3216c_dev *ap3216cdev = container_of(cdev, struct ap3216c_dev, cdev);/* 初始化AP3216C /
ap3216c_write_reg(ap3216cdev, AP3216C_SYSTEMCONG, 0x04); / 复位AP3216C /
mdelay(50); / AP3216C复位最少10ms /
ap3216c_write_reg(ap3216cdev, AP3216C_SYSTEMCONG, 0X03); / 开启ALS、PS+IR */
return 0;
}
/*
-
@description : 从设备读取数据
-
@param - filp : 要打开的设备文件(文件描述符)
-
@param - buf : 返回给用户空间的数据缓冲区
-
@param - cnt : 要读取的数据长度
-
@param - offt : 相对于文件首地址的偏移
-
@return : 读取的字节数,如果为负值,表示读取失败
*/
static ssize_t ap3216c_read(struct file *filp, char __user *buf, size_t cnt, loff_t *off)
{
short data[3];
long err = 0;struct cdev *cdev = filp->f_path.dentry->d_inode->i_cdev;
struct ap3216c_dev *dev = container_of(cdev, struct ap3216c_dev, cdev);ap3216c_readdata(dev);
data[0] = dev->ir;
data[1] = dev->als;
data[2] = dev->ps;
err = copy_to_user(buf, data, sizeof(data));
return 0;
}
/*
- @description : 关闭/释放设备
- @param - filp : 要关闭的设备文件(文件描述符)
- @return : 0 成功;其他 失败
*/
static int ap3216c_release(struct inode *inode, struct file *filp)
{
return 0;
}
/* AP3216C操作函数 */
static const struct file_operations ap3216c_ops = {
.owner = THIS_MODULE,
.open = ap3216c_open,
.read = ap3216c_read,
.release = ap3216c_release,
};
/*
-
@description : i2c驱动的probe函数,当驱动与
-
设备匹配以后此函数就会执行 -
@param - client : i2c设备
-
@param - id : i2c设备ID
-
@return : 0,成功;其他负值,失败
*/
static int ap3216c_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
int ret;
struct ap3216c_dev *ap3216cdev;/* */
ap3216cdev = devm_kzalloc(&client->dev, sizeof(*ap3216cdev), GFP_KERNEL);
if(!ap3216cdev)
return -ENOMEM;/* 注册字符设备驱动 /
/ 1、创建设备号 */
ret = alloc_chrdev_region(&ap3216cdev->devid, 0, AP3216C_CNT, AP3216C_NAME);
if(ret < 0) {
pr_err(“%s Couldn’t alloc_chrdev_region, ret=%d\r\n”, AP3216C_NAME, ret);
return -ENOMEM;
}/* 2、初始化cdev */
ap3216cdev->cdev.owner = THIS_MODULE;
cdev_init(&ap3216cdev->cdev, &ap3216c_ops);/* 3、添加一个cdev */
ret = cdev_add(&ap3216cdev->cdev, ap3216cdev->devid, AP3216C_CNT);
if(ret < 0) {
goto del_unregister;
}/* 4、创建类 */
ap3216cdev->class = class_create(THIS_MODULE, AP3216C_NAME);
if (IS_ERR(ap3216cdev->class)) {
goto del_cdev;
}/* 5、创建设备 /
ap3216cdev->device = device_create(ap3216cdev->class, NULL, ap3216cdev->devid, NULL, AP3216C_NAME);
if (IS_ERR(ap3216cdev->device)) {
goto destroy_class;
}
ap3216cdev->client = client;
/ 保存ap3216cdev结构体 */
i2c_set_clientdata(client,ap3216cdev);return 0;
destroy_class:
device_destroy(ap3216cdev->class, ap3216cdev->devid);
del_cdev:
cdev_del(&ap3216cdev->cdev);
del_unregister:
unregister_chrdev_region(ap3216cdev->devid, AP3216C_CNT);
return -EIO;
}
/*
- @description : i2c驱动的remove函数,移除i2c驱动的时候此函数会执行
- @param - client : i2c设备
- @return : 0,成功;其他负值,失败
*/
static int ap3216c_remove(struct i2c_client *client)
{
struct ap3216c_dev ap3216cdev = i2c_get_clientdata(client);
/ 注销字符设备驱动 /
/ 1、删除cdev /
cdev_del(&ap3216cdev->cdev);
/ 2、注销设备号 /
unregister_chrdev_region(ap3216cdev->devid, AP3216C_CNT);
/ 3、注销设备 /
device_destroy(ap3216cdev->class, ap3216cdev->devid);
/ 4、注销类 */
class_destroy(ap3216cdev->class);
return 0;
}
/* 传统匹配方式ID列表 */
static const struct i2c_device_id ap3216c_id[] = {
{“ap3216c”, 0},
{}
};
/* 设备树匹配列表 /
static const struct of_device_id ap3216c_of_match[] = {
{ .compatible = “alientek,ap3216c” },
{ / Sentinel */ }
};
/* i2c驱动结构体 */
static struct i2c_driver ap3216c_driver = {
.probe = ap3216c_probe,
.remove = ap3216c_remove,
.driver = {
.owner = THIS_MODULE,
.name = “ap3216c”,
.of_match_table = ap3216c_of_match,
},
.id_table = ap3216c_id,
};
/*
-
@description : 驱动入口函数
-
@param : 无
-
@return : 无
*/
static int __init ap3216c_init(void)
{
int ret = 0;ret = i2c_add_driver(&ap3216c_driver);
return ret;
}
/*
- @description : 驱动出口函数
- @param : 无
- @return : 无
*/
static void __exit ap3216c_exit(void)
{
i2c_del_driver(&ap3216c_driver);
}
/* module_i2c_driver(ap3216c_driver) */
module_init(ap3216c_init);
module_exit(ap3216c_exit);
MODULE_LICENSE(“GPL”);
MODULE_AUTHOR(“ALIENTEK”);
MODULE_INFO(intree, “Y”);
相关文章:
stm32mp157和imx6ull在设备树节点上设置ap3216c的主要区别
stm32mp157和imx6ull在设备树节点上设置ap3216c的主要区别是,它们使用的不同的硬件架构和不同的设备树格式。以下是两者之间的差异: 硬件架构:stm32mp157是基于ARM Cortex-M4内核的微控制器,而imx6ull则是基于ARM Cortex-A7内核的…...

网工学习6-配置和管理 VLAN
6.1VLAN概念 1> 什么是 VLAN? VLAN 是一种在交换机上划分逻辑网段的二层技术。 2> 为什么要通过交换机划分网段? ① 因为交换机的端口密度比路由器高,并且价格比路由器低,所以组网成本更低。 ② 因为交换机划分网段比…...

MySQL库与表的备份
库的备份 备份 语法 mysqldump -P3306 -u root -p 密码 -B 数据库名 > 数据库备份存储的文件路径 例 mysqldump -P3306 -u root -p123456 -B mytest > D:/mytest.sql 注意 这是在linux命令行下。 还原 语法 scource 数据库文件路径 例 source D:/mysql-5.7.22/mytest.s…...

Python核心编程之基础内功
目录 一、语句和语法 1、 注释( # ) 2、继续( \ ) 3、多个语句构成代码组(:):...
GPT4-Turbo技术原理研发现状及未来应用潜力分析报告
今天分享的是GPT4-Turb系列深度研究报告:《GPT4-Turbo技术原理研发现状及未来应用潜力分析报告》。 (报告出品方:深度行业分析研究) 报告共计:46页 图像理解能力提升:三大视觉学习方法 为打造视觉大模…...
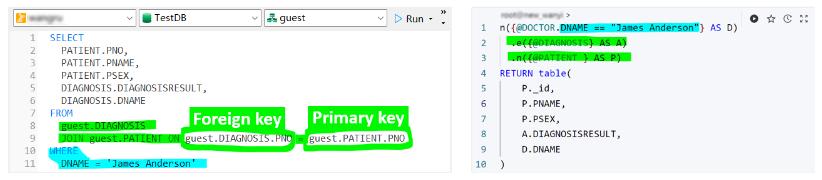
为什么 SQL 不适合图数据库
背景 “为什么你们的图形产品不支持 SQL 或类似 SQL 的查询语言?” 过去,我们的一些客户经常问这个问题,但随着时间的推移,这个问题变得越来越少。 尽管一度被忽视,但图数据库拥有无缝设计并适应其底层数据结构的查询…...
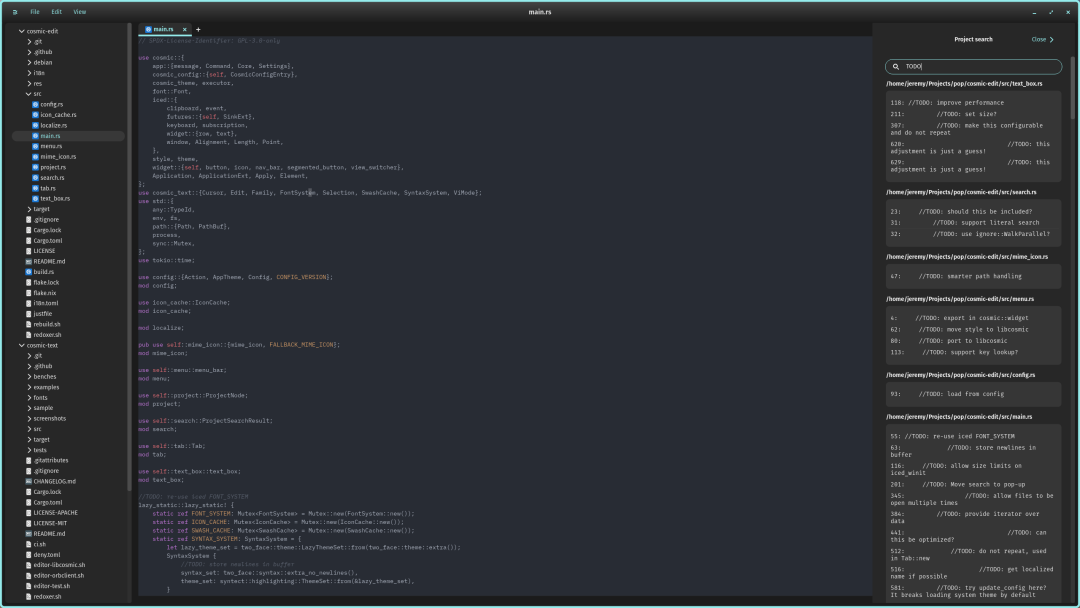
【Rust日报】2023-12-02 深度学习框架 Burn 发布 v0.11.0
深度学习框架 Burn 发布 v0.11.0 深度学习框架 Burn 发布 v0.11.0,新版本引入了自动内核融合(Kernel Fusion)功能,大大提升了访存密集型(memory-bound)操作的性能。同时宣布成立 Tracel AI (https://tracel…...

MySQL性能调优-1-实际优化案例
关于SQL优化的思路,一般都是使用执行计划看看是否用到了索引,主要可能有两大类情况: 对业务字段建立了二级联合索引,但是MySQL错误地觉得走主键聚族索引全表扫描效率更高,而没有走二级索引 走二级索引,但…...

JavaScript空值合并运算符
The Nullish Coalescing Operator(空值合并运算符)是一种 JavaScript 的新运算符,用于解决默认值设定中存在的一些问题。它的语法为 ??(两个问号),表示当左侧的操作数为 null 或 undefined 时,…...

Spring Boot 集成 spring security 01
一、导入依赖(pom.xml) <?xml version"1.0" encoding"UTF-8"?> <project xmlns"http://maven.apache.org/POM/4.0.0" xmlns:xsi"http://www.w3.org/2001/XMLSchema-instance"xsi:schemaLocation&qu…...

C 编程中使用字符串
理解字符串: C 中的字符串是使用字符数组来操作的。数组中的每个字符对应字符串的一个元素,字符串的结尾由空字符(\0)标记。这个空字符至关重要,因为它表示字符串的结尾,并允许函数确定字符串在内存中的结…...

【GD32307E-START】04 使用TinyMaix进行手写数字识别
【GD32307E-START】04 使用TinyMaix进行手写数字识别 参考博客 【GD32F427开发板试用】使用TinyMaix进行手写数字识别 https://blog.csdn.net/weixin_47569031/article/details/129009839 软硬件平台 GD32F307E-START Board开发板GCC Makefile TinyMaix简介 TinyMaix是国…...
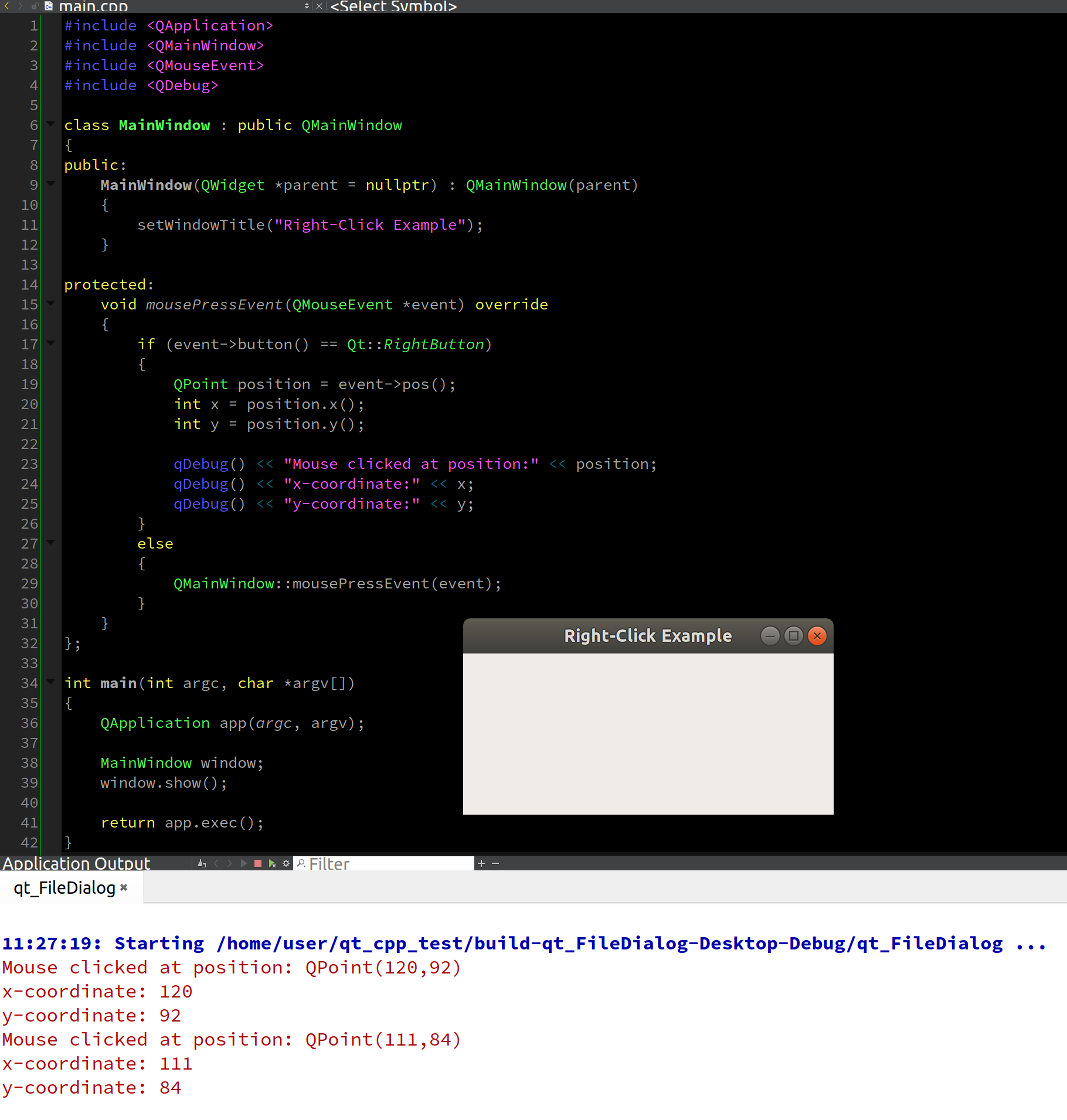
qt-C++笔记之识别点击鼠标右键、点击位置以及Qt坐标系详解
qt-C笔记之识别点击鼠标右键、点击位置以及Qt坐标系详解 code review! 文章目录 qt-C笔记之识别点击鼠标右键、点击位置以及Qt坐标系详解1.示例运行2.event->pos();详解3.event->pos()的坐标系原点4.Qt中的坐标系详解5.QMainWindow::mousePressEvent(event);详解 1.示例…...
小程序开发平台源码系统:搭建新的商业体系 附带完整的搭建教程
小程序开发平台源码系统是在移动互联网快速发展的背景下诞生的。随着微信小程序的普及,越来越多的人开始关注小程序的开发与运营。然而,对于很多初学者和小型企业来说,开发一个小程序需要专业的技术知识和大量的时间投入,这无疑是…...

css3新增的伪类有哪些?
CSS3新增的伪类有: :first-of-type,选择属于其父元素的特定类型的第一个子元素。:last-of-type,选择属于其父元素的特定类型的最后一个子元素。:only-of-type,选择属于其父元素的特定类型的唯一子元素。:only-child,选…...
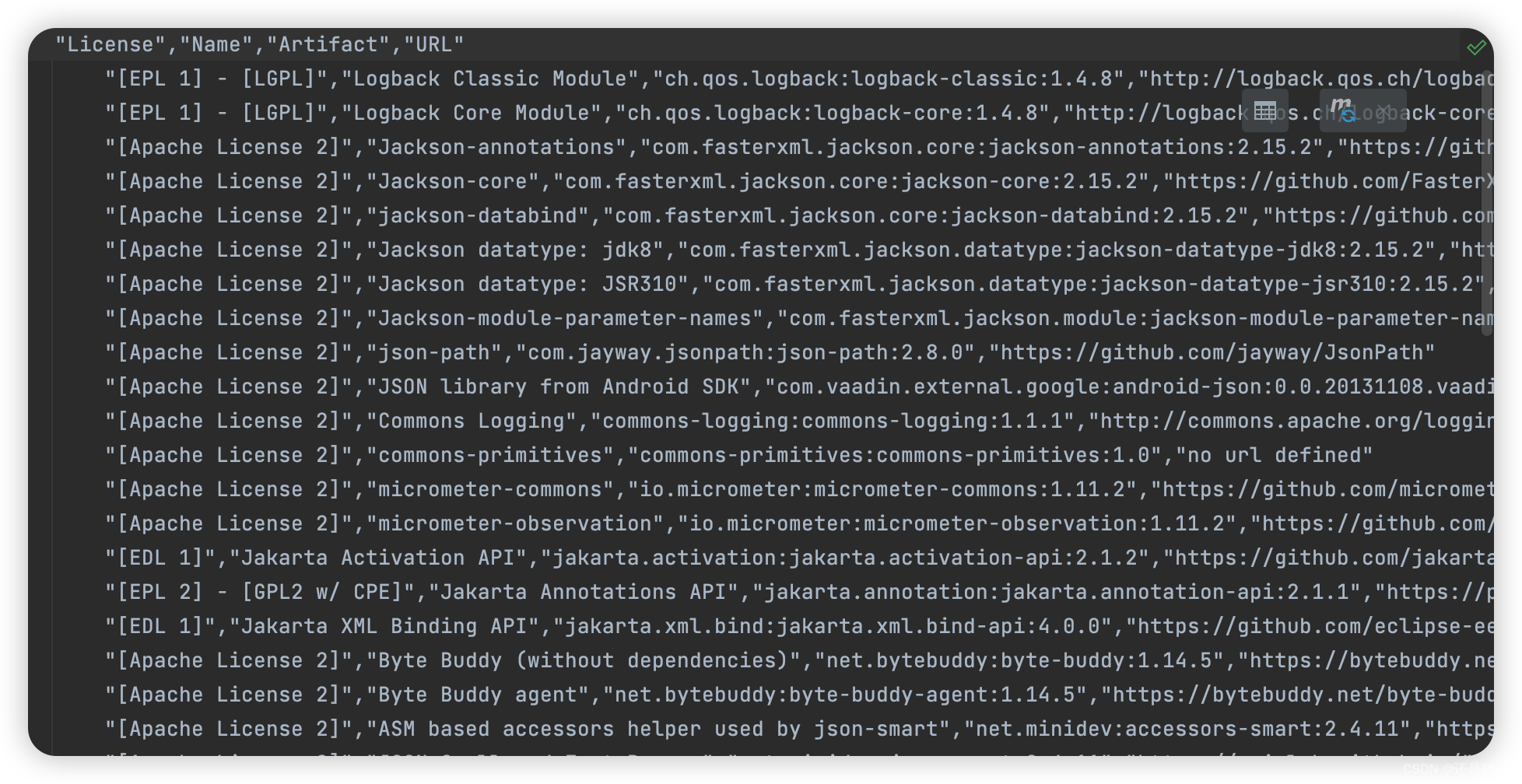
开源软件license介绍与检测
开源License介绍 通俗来讲,开源许可证就是一种允许软件使用者在一定条件内按照需要自由使用和修改软件及其源代码的的法律条款。借此条款,软件作者可以将这些权利许可给使用者,并告知使用限制。这些许可条款可以由个人、商业公司或非赢利组织…...

【LeeCode】142.环形链表II
给定一个链表的头节点 head ,返回链表开始入环的第一个节点。 如果链表无环,则返回 null。 如果链表中有某个节点,可以通过连续跟踪 next 指针再次到达,则链表中存在环。 为了表示给定链表中的环,评测系统内部使用整数…...

nodejs微信小程序+python+PHP健身房信息管理系统的设计与实现-计算机毕业设计推荐
目 录 摘 要 I ABSTRACT II 目 录 II 第1章 绪论 1 1.1背景及意义 1 1.2 国内外研究概况 1 1.3 研究的内容 1 第2章 相关技术 3 2.1 nodejs简介 4 2.2 express框架介绍 6 2.4 MySQL数据库 4 第3章 系统分析 5 3.1 需求分析 5 3.2 系统可行性分析 5 3.2.1技术可行性:…...

springboot集成springsecurity
转载自:www.javaman.cn 1、整合springsecurity 添加pom.xml <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-security</artifactId> </dependency>2、springsecurity认证授权流程…...

脏读、不可重复读、幻读
一、脏读 A事务读取B事务尚未提交的数据,此时如果B事务发生错误并执行回滚操作,那么A事务读取到的数据就是脏数据。就好像原本的数据比较干净、纯粹,此时由于B事务更改了它,这个数据变得不再纯粹。这个时候A事务立即读取了这个脏…...
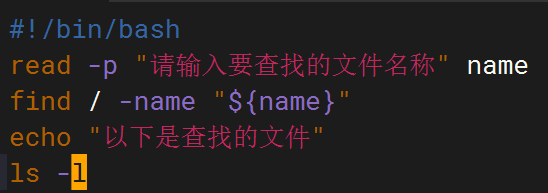
shell脚本--常见案例
1、自动备份文件或目录 2、批量重命名文件 3、查找并删除指定名称的文件: 4、批量删除文件 5、查找并替换文件内容 6、批量创建文件 7、创建文件夹并移动文件 8、在文件夹中查找文件...
基于uniapp+WebSocket实现聊天对话、消息监听、消息推送、聊天室等功能,多端兼容
基于 UniApp + WebSocket实现多端兼容的实时通讯系统,涵盖WebSocket连接建立、消息收发机制、多端兼容性配置、消息实时监听等功能,适配微信小程序、H5、Android、iOS等终端 目录 技术选型分析WebSocket协议优势UniApp跨平台特性WebSocket 基础实现连接管理消息收发连接…...
详解:相对定位 绝对定位 固定定位)
css的定位(position)详解:相对定位 绝对定位 固定定位
在 CSS 中,元素的定位通过 position 属性控制,共有 5 种定位模式:static(静态定位)、relative(相对定位)、absolute(绝对定位)、fixed(固定定位)和…...
多模态大语言模型arxiv论文略读(108)
CROME: Cross-Modal Adapters for Efficient Multimodal LLM ➡️ 论文标题:CROME: Cross-Modal Adapters for Efficient Multimodal LLM ➡️ 论文作者:Sayna Ebrahimi, Sercan O. Arik, Tejas Nama, Tomas Pfister ➡️ 研究机构: Google Cloud AI Re…...

#Uniapp篇:chrome调试unapp适配
chrome调试设备----使用Android模拟机开发调试移动端页面 Chrome://inspect/#devices MuMu模拟器Edge浏览器:Android原生APP嵌入的H5页面元素定位 chrome://inspect/#devices uniapp单位适配 根路径下 postcss.config.js 需要装这些插件 “postcss”: “^8.5.…...
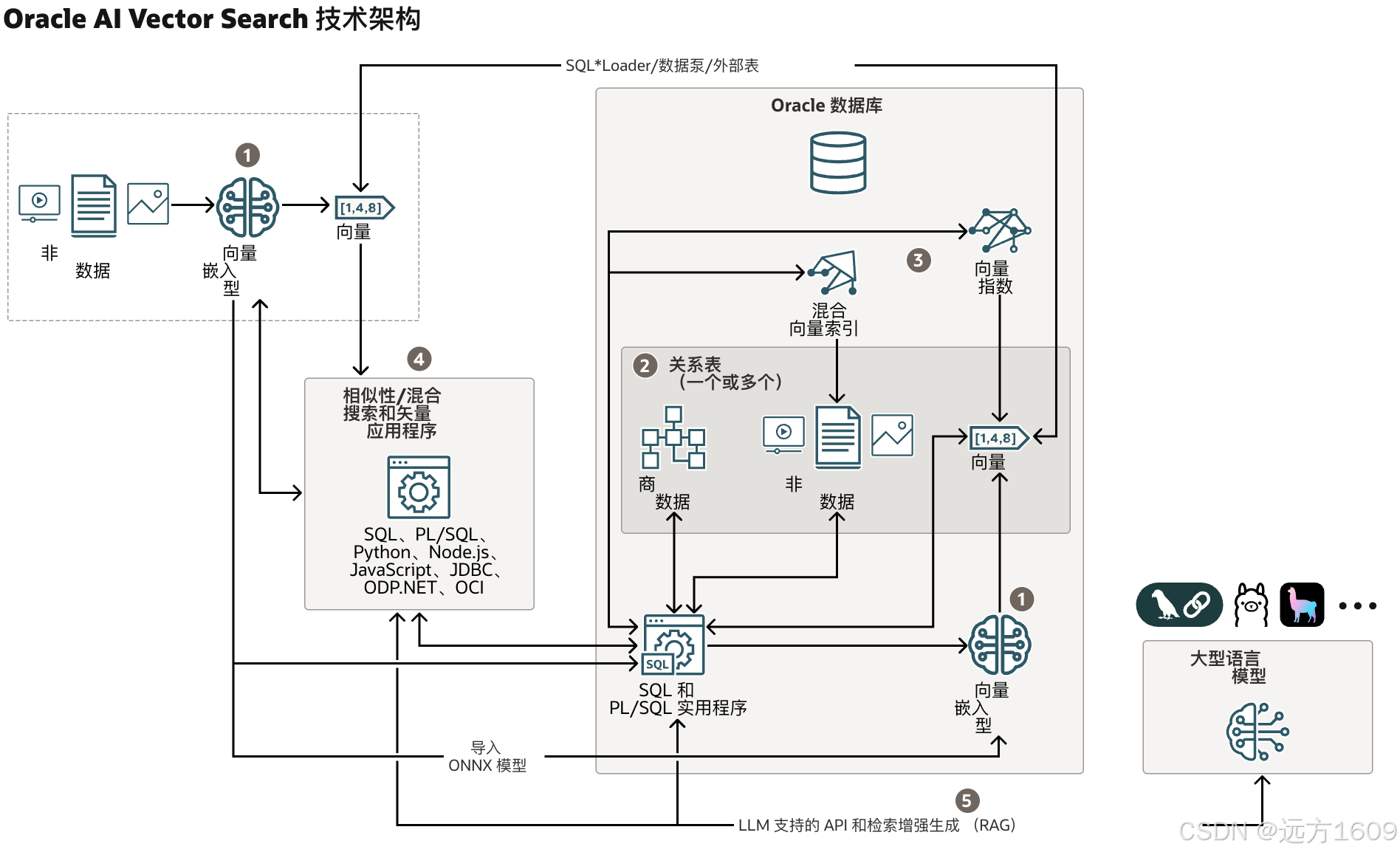
9-Oracle 23 ai Vector Search 特性 知识准备
很多小伙伴是不是参加了 免费认证课程(限时至2025/5/15) Oracle AI Vector Search 1Z0-184-25考试,都顺利拿到certified了没。 各行各业的AI 大模型的到来,传统的数据库中的SQL还能不能打,结构化和非结构的话数据如何和…...

StarRocks 全面向量化执行引擎深度解析
StarRocks 全面向量化执行引擎深度解析 StarRocks 的向量化执行引擎是其高性能的核心设计,相比传统行式处理引擎(如MySQL),性能可提升 5-10倍。以下是分层拆解: 1. 向量化 vs 传统行式处理 维度行式处理向量化处理数…...

初探用uniapp写微信小程序遇到的问题及解决(vue3+ts)
零、关于开发思路 (一)拿到工作任务,先理清楚需求 1.逻辑部分 不放过原型里说的每一句话,有疑惑的部分该问产品/测试/之前的开发就问 2.页面部分(含国际化) 整体看过需要开发页面的原型后,分类一下哪些组件/样式可以复用,直接提取出来使用 (时间充分的前提下,不…...

[QMT量化交易小白入门]-六十二、ETF轮动中简单的评分算法如何获取历史年化收益32.7%
本专栏主要是介绍QMT的基础用法,常见函数,写策略的方法,也会分享一些量化交易的思路,大概会写100篇左右。 QMT的相关资料较少,在使用过程中不断的摸索,遇到了一些问题,记录下来和大家一起沟通,共同进步。 文章目录 相关阅读1. 策略概述2. 趋势评分模块3 代码解析4 木头…...

SpringCloud优势
目录 完善的微服务支持 高可用性和容错性 灵活的配置管理 强大的服务网关 分布式追踪能力 丰富的社区生态 易于与其他技术栈集成 完善的微服务支持 Spring Cloud 提供了一整套工具和组件来支持微服务架构的开发,包括服务注册与发现、负载均衡、断路器、配置管理等功能…...