MATLAB的rvctools工具箱熟悉运动学【机械臂机器人示例】
1、rvctools下载安装
rvctools下载地址:rvctools下载
截图如下,点击红色箭头指示的“Download Shared Folder” 即可下载

下载之后进行解压,解压到D:\MATLAB\toolbox这个工具箱目录,这个安装路径根据自己的情况来选择,没有安装MATLAB,感兴趣的可以查阅:MatLab的下载、安装与使用(亲测有效)
然后我们打开MATLAB,打开上面解压的这个机器人工具箱,双击startup_rvc.m,点击运行,如下图:
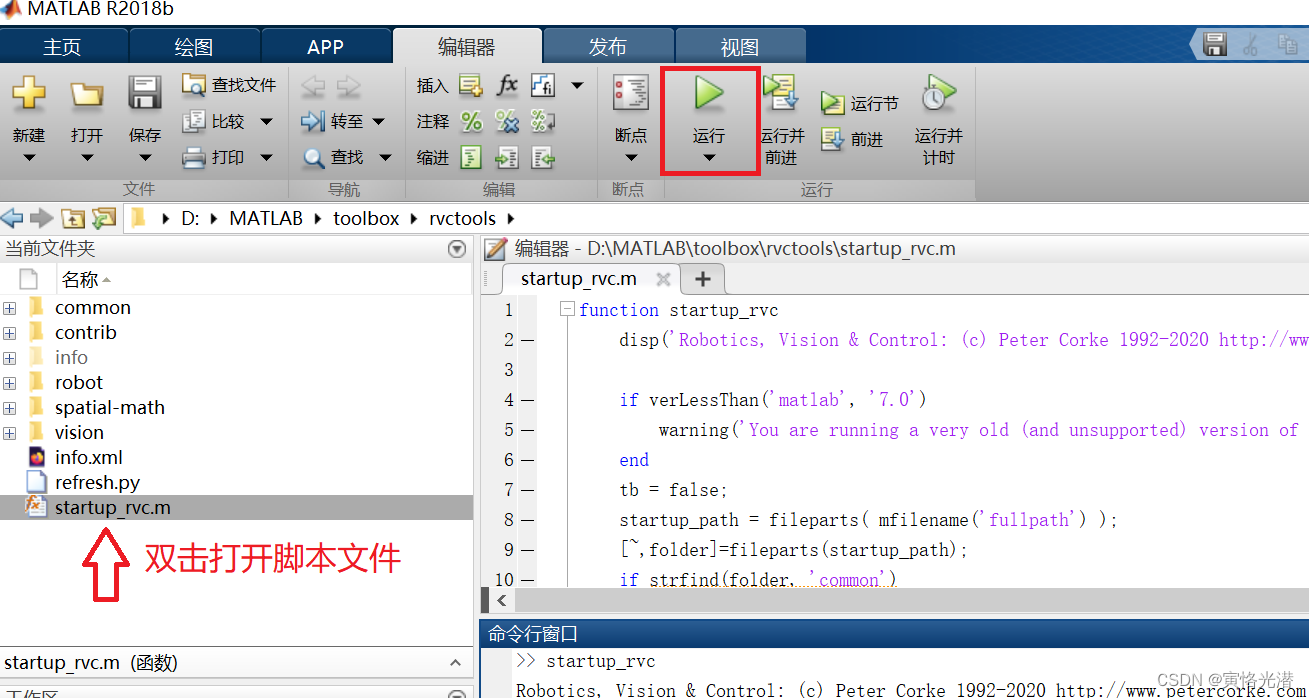
这样就愉快的安装好了这个机器人工具箱了,其中startup_rvc.m的代码如下:
function startup_rvcdisp('Robotics, Vision & Control: (c) Peter Corke 1992-2020 http://www.petercorke.com')if verLessThan('matlab', '7.0')warning('You are running a very old (and unsupported) version of MATLAB. You will very likely encounter significant problems using the toolboxes but you are on your own with this');endtb = false;startup_path = fileparts( mfilename('fullpath') );[~,folder]=fileparts(startup_path);if strfind(folder, 'common')% startup_rvc is in common folderrvcpath = fileparts(startup_path);else% startup_rvc is in folder above commonrvcpath = startup_path;endrobotpath = fullfile(rvcpath, 'robot');if exist(robotpath, 'dir')addpath(robotpath);tb = true;if exist('startup_rtb') == 2startup_rtbendendvisionpath = fullfile(rvcpath, 'vision');if exist(visionpath, 'dir')addpath(visionpath);tb = true;if exist('startup_mvtb') == 2startup_mvtbendendif tb% RTB or MVTB is present% add spatial math toolboxp = fullfile(rvcpath, 'spatial-math');if exist(p, 'dir')tryfp = fopen( fullfile(p, 'RELEASE'), 'r');release = fgetl(fp);fclose(fp);catch MErelease = [];endif releaserelease = ['(release ' release ')'];elserelease = '';endfprintf('- Spatial Math Toolbox for MATLAB %s\n', release)addpath(p);end% add common filesaddpath(fullfile(rvcpath, 'common'));elsefprintf('Neither Robotics Toolbox or MachineVision Toolbox found in %s\n', rvcpath);end% check for any install problemsrvccheck(false)
end后期如果关闭了MATLAB,想要运行机器人的话,运行函数startup_rvc即可
2、运动学
机器人或者说飞行器,随着时间而发生动作变换,叫做运动学(kinematics),这个跟动力学(dynamics)是不一样的,动力学是研究影响运动的因素,而动力学是不考虑作用力和质量等因素,研究的是随着时间在空间中的位置问题。对于运动基本上就是平移和旋转了,就会牵涉到坐标系和角度等转换,接下来我们来学习下
2.1、平移
物体的平移比较简单,就是沿着XYZ三轴平移
沿着X轴平移:transl(2,0,0)
沿着Y轴平移:transl(0,2,0)
沿着Z轴平移:transl(0,0,2)
当然也可以在XYZ轴都进行平移:transl(1,3,2)
我们对最后这个画图看下效果:trplot(transl(1,3,2)),如下图:

我标注红点的位置是(1,3,2),因为是在三维空间的展示,所以看起来XYZ轴的数值不对,其实是对的,大家可以在MATLAB中的这张图进行拖动旋转,然后就会发现红点的坐标就是(1,3,2)
2.2、旋转
旋转就是绕轴做圆周运动
绕X轴旋转:Rx = rotx(pi/2)
绕Y轴旋转:Ry = roty(pi/2)
绕Z轴旋转:Rz = rotz(pi/2)
旋转叠加:Rxy = Rx * Ry
动画演示:tranimate(Rxy),这样看起来非常清晰直观。
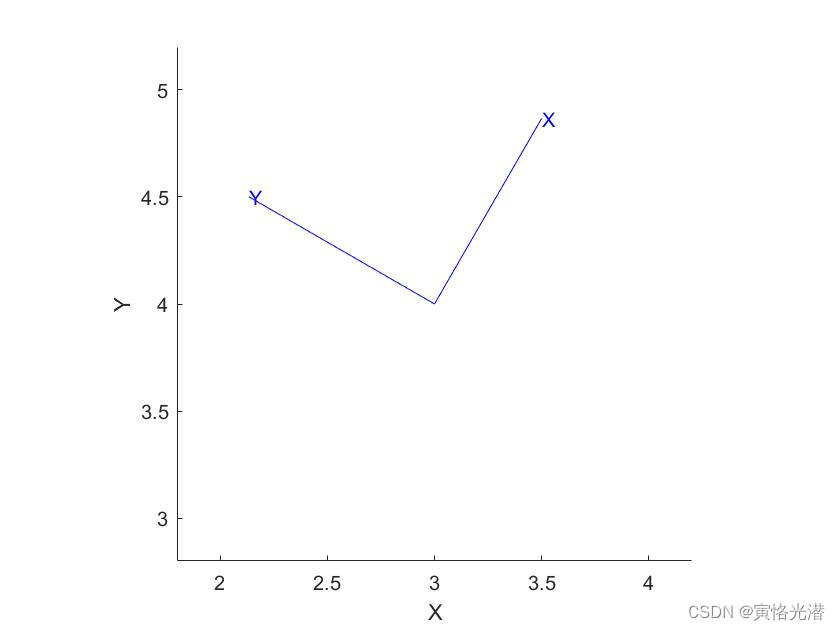
我们来看下点(3,4),旋转60度的情况:
T1=SE2(3,4,pi/3)T1 = 0.5000 -0.8660 30.8660 0.5000 40 0 1
对其画图:trplot(T1),如下:
我们也可以使用transforms3d库中的结果,用来验证在MATLAB中生成的结果,代码如下:
import transforms3d as tfs
import math
print(tfs.euler.euler2mat(math.pi/3,0,0))
/*
[[ 1. 0. 0. ][ 0. 0.5 -0.8660254][-0. 0.8660254 0.5 ]]
*/MATLAB中的结果如下:
T2=rotx(pi/3)
/*
T2 =1.0000 0 00 0.5000 -0.86600 0.8660 0.5000
*/上述是弧度制,也可以使用角度制, 指定deg参数:rotx(60,'deg')
3、六轴机器人
3.1、Link关节连杆
这里我们使用更改的D-H参数,也就是接下来的Link函数指定modified参数
L = Link([1 2 3 4],'modified')
%L = Revolute(mod): theta=q, d=2, a=3, alpha=4, offset=0Link函数里面的参数分别表示为,关节角度[L1.theta]、连杆偏距[L1.d]、连杆长度[L1.a]、连杆旋转角度[L1.alpha],参数modified表示的是改进版本的DH参数
这里附带介绍下D-H的相关知识:
DH参数是一种描述机器人关节之间关系的参数化方法,由Denavit和Hartenberg提出。DH参数法可以用4个参数来表示刚体之间的相对关系,包括沿Z轴的平移长度a、沿共同法线的旋转角度α、在XZ平面内的偏移距离d、绕Z轴的旋转角度θ。
DH参数在ROS中被广泛应用,用于描述机器人关节和坐标系之间的关系,主要用于正向运动学计算,可以通过DH表获取每个关节的变换矩阵,将所有变换矩阵相乘,最终获得从基准坐标系到末端执行器坐标系的变换矩阵。
这个D-H方法是在运动学中求解比较通用的,其余还有李代数方法等。
连杆类型
L.type()
%ans = 'R'也就是说这个是旋转的R(revolute)关节类型,除此之外还有一种是柱状形(prismatic)的关节
接下来就是分别创建6个关节,也就是为6轴的机械臂做准备:
L1 = Link([0 0 0 0],'modified')
L2 = Link([0 0.138+0.024 0 -pi/2],'modified')
L3 = Link([0 -0.127-0.024 0.42 0],'modified')
L4 = Link([0 0.114+0.021 0.375 0],'modified')
L5 = Link([0 0.114+0.021 0 -pi/2],'modified')
L6 = Link([0 0.09+0.021 0 pi/2],'modified')3.2、SerialLink机械臂
上面定义好了6个关节,接下来我们使用SerialLink将这些关节连接起来成为一个六轴机械臂的机器人。
MyBot = SerialLink([L1,L2,L3,L4,L5,L6],'name','Six Axis Robot')我们先来看下SerialLink有哪些方法:help(SerialLink)
--- SerialLink 的帮助 ---
SerialLink Serial-link robot class
A concrete class that represents a serial-link arm-type robot. Each link
and joint in the chain is described by a Link-class object using Denavit-Hartenberg
parameters (standard or modified).
Constructor methods::
SerialLink general constructor
L1+L2 construct from Link objects
Display/plot methods::
animate animate robot model
display print the link parameters in human readable form
dyn display link dynamic parameters
edit display and edit kinematic and dynamic parameters
getpos get position of graphical robot
plot display graphical representation of robot
plot3d display 3D graphical model of robot
teach drive the graphical robot
Testing methods::
islimit test if robot at joint limit
isconfig test robot joint configuration
issym test if robot has symbolic parameters
isprismatic index of prismatic joints
isrevolute index of revolute joints
isspherical test if robot has spherical wrist
isdh test if robot has standard DH model
ismdh test if robot has modified DH model
Conversion methods::
char convert to string
sym convert to symbolic parameters
todegrees convert joint angles to degrees
toradians convert joint angles to radians
从SerialLink类提供的方法,我们了解到可以用来描述机器人的连杆结构:SerialLink类描述机器人的连杆结构,包括每个连杆的长度、方向和旋转轴。有了这些信息,我们可以用于计算机器人的运动学模型,从而对机器人做出控制和运动规划。
显示连接参数:MyBot.display()
MyBot = Six Axis Robot:: 6 axis, RRRRRR, modDH, slowRNE
+---+-----------+-----------+-----------+-----------+-----------+
| j | theta | d | a | alpha | offset |
+---+-----------+-----------+-----------+-----------+-----------+
| 1| q1| 0| 0| 0| 0|
| 2| q2| 0.162| 0| -1.5708| 0|
| 3| q3| -0.151| 0.42| 0| 0|
| 4| q4| 0.135| 0.375| 0| 0|
| 5| q5| 0.135| 0| -1.5708| 0|
| 6| q6| 0.111| 0| 1.5708| 0|
+---+-----------+-----------+-----------+-----------+-----------+操作机械臂:MyBot.teach()
这样就会生成六轴机械臂的机器人,然后我们就可以通过操作不同关节来操作机器人的机械臂了,如下图:

我们操作左边q1~q6,就会看到机械臂的运动以及XYZ轴和RPY欧拉角的变化
4、运动学
4.1、正运动学
运动学分为正解和逆解,正运动学(Forward kinematics):已知每个关节的位姿与连杆的长度等参数,求解末端执行器的位姿。
我们来看下正解
MyBot.fkine([pi/2 -pi/4 pi/2 pi/3 -pi/2 pi/6])
/*
ans = -0.8660 0.5000 0 -0.146-0.4830 -0.8365 0.2588 0.46050.1294 0.2241 0.9659 0.1740 0 0 1
*/生成的是对应关节角度的末端的齐次变换矩阵。
4.2、逆运动学
逆运动学(Inverse kinematics)跟正运动学是反过来的,根据机器人的末端执行器的位姿,计算出机器人各个关节的位姿等运动参数。这个要复杂点,因为它的求解可能是不确定的唯一解,会产生多重解的问题,当然也可能得不到解析解的情况。
迭代法:
%起始状态
init = [0.795 0.257 -0.135 0 0 -pi/2]
%目标状态
targ = [0 0.836 -0.135 0 -pi/3 -pi/2]
T0=MyBot.fkine(init)
/*
T0 = 0.0852 0.6951 -0.7139 0.35010.0869 0.7086 0.7003 0.72390.9926 -0.1217 0 -0.28640 0 0 1
*/
TF=MyBot.fkine(targ)
/*
TF = 0.6450 0.3821 -0.6618 0.40760 0.8660 0.5000 0.20150.7642 -0.3225 0.5586 -0.59470 0 0 1
*/
%每次迭代的末端执行器相对于首端的齐次变换矩阵
step =50
%ctraj是Matlab中机器人轨迹(trajectory)规划的函数
TC=ctraj(T0,TF,step)
%比如迭代到第50次
/*
TC(50) = 0.6450 0.3821 -0.6618 0.40760 0.8660 0.5000 0.20150.7642 -0.3225 0.5586 -0.59470 0 0 1
*/
qq = MyBot.ikine(TC,'mask',[1 1 1 0 0 0])返回的就是50*6的双精度数组,长度是50:length(qq)
0.7951 0.1852 0.0167 -0.0314 0.0432 0
0.7946 0.1853 0.0174 -0.0303 0.0422 0
0.7931 0.1856 0.0196 -0.0267 0.0394 0
......
-0.1278 0.6478 0.4212 0.2245 -0.2429 0
-0.1317 0.6494 0.4203 0.2230 -0.2419 0
-0.1330 0.6500 0.4201 0.2226 -0.2416 0
接下来我们使用ctraj来规划轨迹,使用ikine函数来做逆解,沿着轨迹进行运动。
5、直线轨迹规划
这里使用标准的DH参数来测试下,三个自由度的机械臂如何做运动规划的,一起来了解下:
%这里是第一次开启MATLAB时,运行这个函数,启动rvc:startup_rvc
%参数:关节角、偏置距离、连杆长度、连杆扭角、sigma为0表示旋转关节
L1 = Link([0 84.72 41.04 pi/2 0]);
L2 = Link([0 0 200 0 0]);
L3 = Link([0 0 214.8 0 0]);% 可以限制旋转角度范围
L1.qlim = [deg2rad(-170) deg2rad(170)];
L2.qlim = [deg2rad(-60) deg2rad(85)];
L3.qlim = [deg2rad(-90) deg2rad(10)];Bot2 = SerialLink([L1 L2 L3], 'name', '机械臂运动学');
%手动操作关节进行旋转
Bot2.teach()%起点
T1 = transl(100,-10,50);
%终点
T2 = transl(300,-30,200);
%规划轨迹(trajectory)
T = ctraj(T1,T2,50);
Tj = transl(T);
%输出末端轨迹
plot3(Tj(:,1),Tj(:,2),Tj(:,3));
%当反解的机械臂自由度少于6时,要用mask掩码减少自由度,否则无法直接调用ikine作为运动学反解函数
q = Bot2.ikine(T,'mask',[1 1 1 0 0 0]);
Bot2.plot(q);
这样就会看到沿着规划好的直线,自动进行运动了,简单起见截个图如下(实质是运动的):

6、圆轨迹规划
N = (0:0.5:100)';
center = [200 -150 -50];
radius = 60;
theta = (N/N(end))*2*pi;
points = (center + radius*[cos(theta) sin(theta) zeros(size(theta))])';
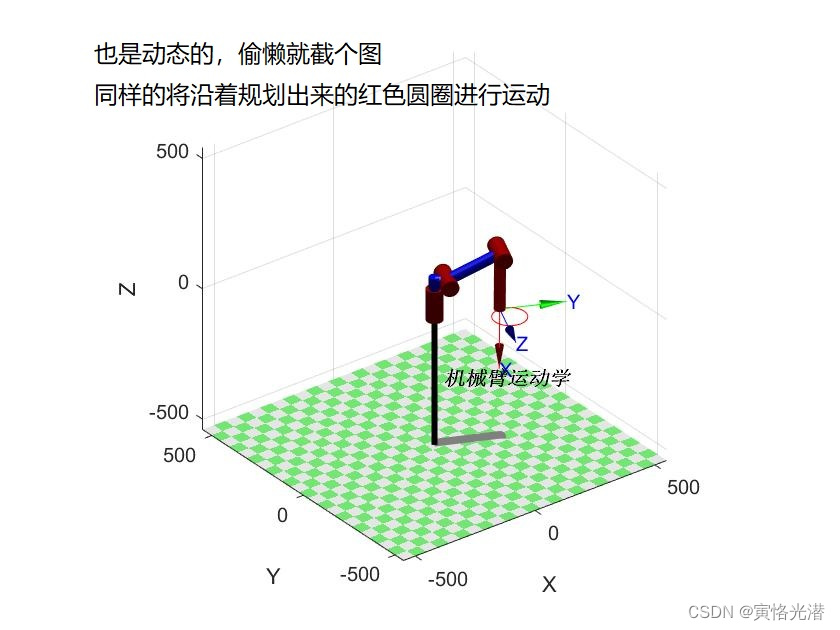
plot3(points(1,:),points(2,:),points(3,:),'r');%沿着圆的轨迹平移
T = transl(points');
q2 = Bot2.ikine(T,'mask',[1 1 1 0 0 0]);
Bot2.plot(q2);这样就会看到沿着规划好的圆,自动进行运动了,简单起见截个图如下(实质是运动的):
7、常见用法
其余的一些常见用法,如下:
关节数:MyBot.n
画出机械臂:MyBot.plot([0 0 0 0 0 0])
机器人的结构类型:Mybot.config
关节范围:MyBot.qlim
连杆向量(更直观):MyBot.links
重力方向([gx gy gz]):MyBot.gravity
连杆的动力学属性:MyBot.dyn
是否是旋转关节:MyBot.isrevolute
是否是移动关节:MyBot.isprismatic
是否是球关节:MyBot.isspherical
关节与连杆是否有符号参数:MyBot.issym
可以编辑动力学参数:MyBot.edit
8、小结
文章主要介绍了机器人工具箱rvctools,以及它的用法,了解运动学的相关知识,对坐标的变换,轨迹的规划等有个直观的了解,最后在进行运动规划的时候,有时候会出现下面这样的错误:
警告: failed to converge: try a different initial value of joint coordinates
收敛失败:尝试不同的关节坐标初始值
这样的情况一般是关节不能到达那个坐标,所以需要更改坐标为合理值即可。
另外仔细观察代码中会出现一些矩阵带单引号',这个表示转置的意思,比如:
size(N)的形状是1 x 201,而size(N')的形状就是201 x 1
元素个数numel(N) 结果:201,维度ndims(N) 结果:2
相关文章:
MATLAB的rvctools工具箱熟悉运动学【机械臂机器人示例】
1、rvctools下载安装 rvctools下载地址:rvctools下载 截图如下,点击红色箭头指示的“Download Shared Folder” 即可下载 下载之后进行解压,解压到D:\MATLAB\toolbox这个工具箱目录,这个安装路径根据自己的情况来选择,…...

如何精准操作无人机自动停机坪?
无人机自动停机坪通过自主导航和避障功能,实现了无人机的自主降落和起飞,在无人机技术领域起到了至关重要的作用。停机坪不仅仅是无人机的起降平台,还具备自动换电或充电等功能,为无人机的自动化提供了关键支持。为更有效地操作无…...
【蓝桥杯】带分数
带分数 题目要求用一个ab/c的形式得到一个值,而且只能在1~9里面不重复的组合。 可以对1~9进行全排列,然后不断划分区间。 #include<iostream> #include<vector> using namespace std; int st[15]; int num[15]; int res; int n;int calc(i…...

软件工程 课堂测验 选择填空
系统流程图用图形符号表示系统中各个元素,表达了系统中各个元素之间的 信息流动 喷泉模型是一种以用户需求为动力,以 对象 为驱动的模型。 软件生存周期中最长的是 维护 阶段。 变换流的DFD由三部分组成,不属于其中一部分的是 事务中心 软…...
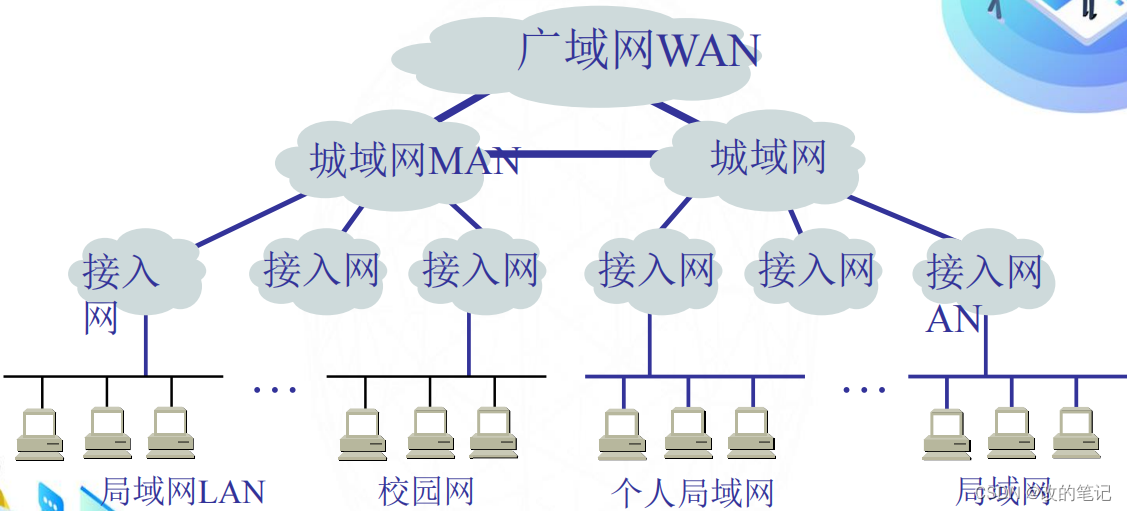
计算机网络的分类
目录 一、按照传输介质进行分类 1、有线网络 2、无线网络 二、按照使用者进行分类 1、公用网 (public network) 2、专用网(private network) 三、按照网络规模和作用范围进行分类 1、PAN 个人局域网 2、LAN 局域网 3、MAN 城域网 4、 WAN 广域网 5、Internet 因特…...

百度收录批量查询工具,免费SEO优化排名工具
拥有一个在搜索引擎中得到良好收录的网站对于个人和企业都至关重要。而百度,作为中国最大的搜索引擎,其收录情况直接影响着网站的曝光度和流量。 百度搜索引擎是中文用户获取信息的重要途径之一。而在这个竞争激烈的网络环境中,了解自己网站…...

select选择框里填充图片,下拉选项带图片
遇到一个需求,选择下拉框选取图标,填充到框里 1、效果展示 2、代码 <el-form-item label"工种图标" class"Form_icon Form_label"><el-select ref"select" :value"formLabelAlign.icon" placeholder&…...

轨道交通数字孪生可视化平台,助力城市交通运营智慧化
随着经济和科技的快速发展,轨道交通运营管理在日常操作者面临各种挑战。数字孪生技术被认为是未来轨道交通运营管理的重要手段之一。它可以提高轨道交通的运营效率和安全性,助力城市交通运营智慧化。以城市轨道交通运维管理业务需求为导向,从数据感知、融…...

【每日OJ —— 101. 对称二叉树】
每日OJ —— 101. 对称二叉树 1.题目:101. 对称二叉树2.解法2.1.算法讲解2.2.代码实现2.3.提交通过展示 1.题目:101. 对称二叉树 2.解法 2.1.算法讲解 1.该题是判断二叉树是否对称,关键在于,左子树等于右子树,而所给的…...

善网商城上线洁柔产品 公益人专享爱心价官方正品
近日,中国善网慈善商城(以下简称善网商城)系统经升级后重新上线。目前善网商城线上销售的中顺洁柔旗下慈善产品已顺利获得中顺洁柔纸业股份有限公司授权,双方就合作事宜达成共识,并于近日签订线上经营授权书。 &#x…...

禁止谷歌浏览器自动更新
禁止谷歌浏览器自动更新 在使用Python包selenium的时候浏览器版版本发生变化后产生很多问题如: 1、直接版本不对应无法运行 2、版本不一致导致debug启动浏览器超级慢 这里是已谷歌浏览器为代表的。 禁止自动更新的方法如下: 1、WinR调出运行&#x…...
给C#)
Oracle存储过程返回DataSet(多个DataTable)给C#
一、存储过程 CREATE OR REPLACE PROCEDURE GET_SENDEXCEL_XY ( ZGJ182X OUT SYS_REFCURSOR , ZGJ182Y OUT SYS_REFCURSOR , ZXN182X OUT SYS_REFCURSOR , ZXN182Y OUT SYS_REFCURSOR , ZLH182X OUT SYS_REFCURSOR …...
如何往excel中写子表?
with pd.ExcelWriter("C:/last_date.xlsx") as writer:for i in range(0, 10):df pd.DataFrame()df.to_excel(writer, indexFalse, sheet_namestr(days[i 1]))...

Flutter 控件查阅清单
为了方便记录和使用Flutter中的各种控件,特写此博客以记之,好记性不如烂笔头嘛:) 通过控件的首字母进行查找,本文会持续更新 控件目录 AAppBar BCContainerColumn (列) DDivider (分割线) EElev…...

【高效开发工具系列】gson入门使用
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 推荐:kwan 的首页,持续学…...

Python中的缺失值
Python中的缺失值 1、情景描述2、Python中的缺失值 1、情景描述 在使用Pandas中的文件读取API读取Excel、CSV或TXT等文件时,我们可能需要对读取到的数据进行简单清洗。例如,将其中的表示空值的字符串替换为真正意义上的缺失值 来看一个例子:…...
JVM 字节码
JVM概述 问题引出 你是否也遇到过这些问题? 运行着的线上系统突然卡死,系统无法访问,甚至直接OOM!想解决线上JVM GC问题,但却无从下手。新项目上线,对各种JVM参数设置一脸茫然,直接默认吧&…...

ComfiUI API调用随记
来进行知识接力了: 首先了解下ComfiUI的APIstable diffusion comfyui的api使用教程-CSDN博客 对于ComfiUI,接口比较简单。查询接口比较容易看明白。 对于发起prompt的请求,如果需要图片的,则需预先上传图片给ComfiUI,…...
Dockerfile讲解
Dockerfile 1. 构建过程解析2. Dockerfile常用保留字指令3. 案例3.1. 自定义镜像mycentosjava83.2. 虚悬镜像 4. Docker微服务实战 dockerfile是用来构建docker镜像的文本文件,是由一条条构建镜像所需的指令和参数构成的脚本。 dockerfile定义了进程需要的一切东西&…...

Ansible及其优势是什么?
Ansible是一款极其简单的开源的自动化运维工具,基于Python开发,集合了众多运维工具(puppet, cfengine, chef, func, fabric)的优点。实现了批量系统配置,批量程序部署,批量运行命令等功能。同时Ansible是基于模块工作,…...

终极指南:如何将danger-js与Webpack集成实现自动化代码审查
终极指南:如何将danger-js与Webpack集成实现自动化代码审查 【免费下载链接】danger-js ⚠️ Stop saying "you forgot to …" in code review 项目地址: https://gitcode.com/gh_mirrors/da/danger-js Danger JS是一个强大的自动化代码审查工具&a…...

Youtu-VL-4B-Instruct效果展示:高清OCR+精准Box定位+多轮图文对话作品集
Youtu-VL-4B-Instruct效果展示:高清OCR精准Box定位多轮图文对话作品集 1. 引言:当“看图说话”进化成“看图办事” 你有没有遇到过这种情况?看到一张复杂的图表,想快速提取里面的数据,却要手动一个个去数;…...

从Java全栈工程师视角看Web开发的实战与思考
从Java全栈工程师视角看Web开发的实战与思考 面试现场:一次真实的技术对话 面试官:你好,我是今天的面试官,很高兴见到你。请先简单介绍一下自己。 应聘者:你好,我叫李明,28岁,本科学…...

企业级离线OCR深度解析:5大策略实现高性能文字识别
企业级离线OCR深度解析:5大策略实现高性能文字识别 【免费下载链接】Umi-OCR OCR software, free and offline. 开源、免费的离线OCR软件。支持截屏/批量导入图片,PDF文档识别,排除水印/页眉页脚,扫描/生成二维码。内置多国语言库…...

AI合规 I 算法备案、大模型备案和登记的区别,双备案又是什么?
开头附上完整阅读链接:AI合规 I 算法备案、大模型备案和登记的区别,双备案又是什么?https://mp.weixin.qq.com/s/QjjnWhbeDvPGduz31O49dQ 公司马上要上线一个新的AI产品,但是突然发现:"我好像需要做备案…...

OpenClaw学习助手方案:Qwen2.5-VL-7B解析教材插图生成记忆卡片
OpenClaw学习助手方案:Qwen2.5-VL-7B解析教材插图生成记忆卡片 1. 为什么需要AI辅助学习工具 去年备考专业认证时,我发现自己总在重复低效的学习循环——花大量时间手动整理教材图表中的关键数据,再誊写到Anki卡片上。这种机械劳动不仅耗时…...

linux系统中简单统计java项目代码行数信息
新建脚本文件(最好在项目根目录下):count_java.shvi count_java.sh编辑内容:按一下键盘上的i键,屏幕左下角会出现 -- INSERT --,输入一下内容: #!/bin/bash find . -name "*.java" -p…...

【原创改进代码】考虑电动汽车移动储能特性的多区域电网功率波动平抑优化调控附python代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。 🍎 往期回顾关注个人主页:Matlab科研工作室 👇 关注我领取海量matlab电子…...
iPhone上跑Transformer太慢?试试EfficientFormer-L1,实测延迟比MobileViT快一倍
iPhone端Transformer模型加速实战:EfficientFormer-L1性能优化解析 移动端AI开发者常面临一个核心矛盾:如何在有限的计算资源下,既保持模型精度又实现实时推理?传统方案往往需要在MobileNet等轻量卷积网络和视觉Transformer&#…...

PasteMD用户调研报告:2024年文档格式转换需求分析
PasteMD用户调研报告:2024年文档格式转换需求分析 1. 调研背景与核心发现 最近整理了500份来自不同行业用户的实际反馈,这些反馈不是问卷里的标准答案,而是真实工作场景中留下的痕迹——有深夜赶论文时的抱怨截图,有项目汇报前的…...