ROS-ROS通信机制-服务通信
文章目录
- 一、服务通信基本知识
- 二、自定义srv
- 三、C++实现
- 四、Python实现
一、服务通信基本知识
服务通信也是ROS中一种极其常用的通信模式,服务通信是基于请求响应模式的,是一种应答机制。也即: 一个节点A向另一个节点B发送请求,B接收处理请求并产生响应结果返回给A。比如如下场景:
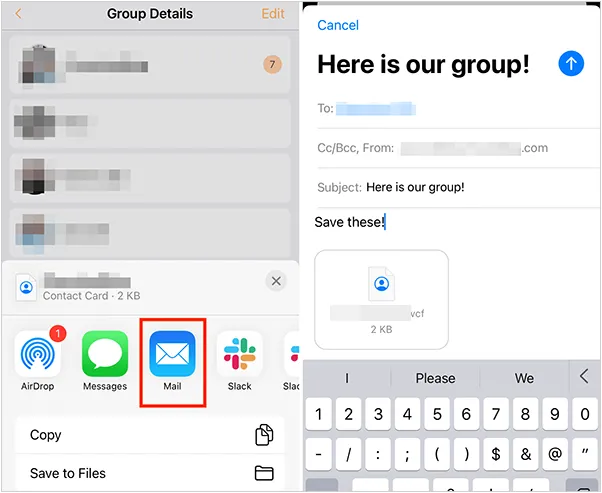
- 机器人巡逻过程中,控制系统分析传感器数据发现可疑物体或人… 此时需要拍摄照片并留存。
在上述场景中,就使用到了服务通信。
一个节点需要向相机节点发送拍照请求,相机节点处理请求,并返回处理结果
与上述应用类似的,服务通信更适用于对时时性有要求、具有一定逻辑处理的应用场景。
概念
以请求响应的方式实现不同节点之间数据交互的通信模式。
作用
用于偶然的、对时时性有要求、有一定逻辑处理需求的数据传输场景。
案例
实现两个数字的求和,客户端节点,运行会向服务器发送两个数字,服务器端节点接收两个数字求和并将结果响应回客户端。
服务通信较之于话题通信更简单些,理论模型如下图所示,该模型中涉及到三个角色:
- ROS master(管理者)
- Server(服务端)
- Client(客户端)
ROS Master 负责保管 Server 和 Client 注册的信息,并匹配话题相同的 Server 与 Client ,帮助 Server 与 Client 建立连接,连接建立后,Client 发送请求信息,Server 返回响应信息。
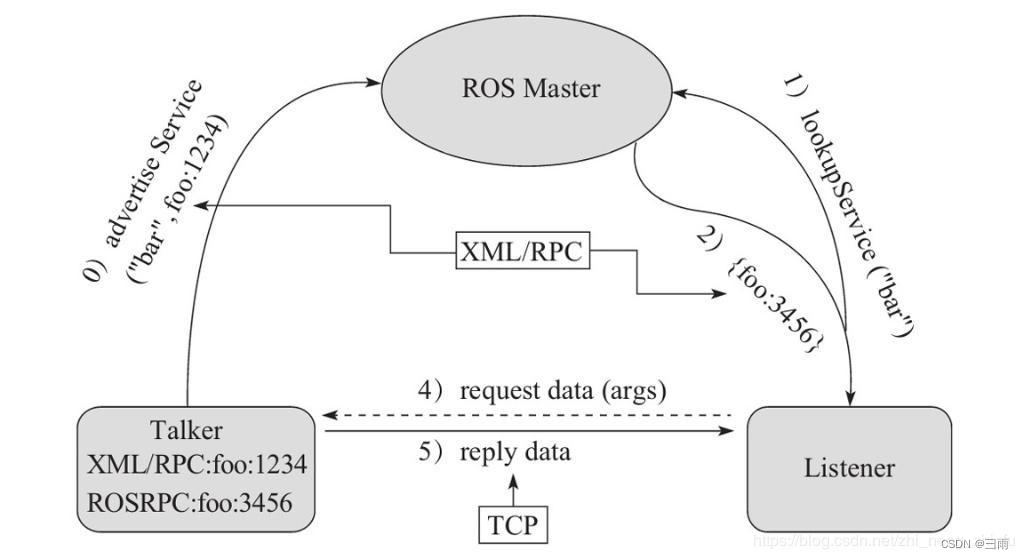
整个流程由以下步骤实现:
0.Server注册
Server 启动后,会通过RPC在 ROS Master 中注册自身信息,其中包含提供的服务的名称。ROS Master 会将节点的注册信息加入到注册表中。
1.Client注册
Client 启动后,也会通过RPC在 ROS Master 中注册自身信息,包含需要请求的服务的名称。ROS Master 会将节点的注册信息加入到注册表中。
2.ROS Master实现信息匹配
ROS Master 会根据注册表中的信息匹配Server和 Client,并通过 RPC 向 Client 发送 Server 的 TCP 地址信息。
3.Client发送请求
Client 根据步骤2 响应的信息,使用 TCP 与 Server 建立网络连接,并发送请求数据。
4.Server发送响应
Server 接收、解析请求的数据,并产生响应结果返回给 Client。
注意:
1.客户端请求被处理时,需要保证服务器已经启动;
2.服务端和客户端都可以存在多个。
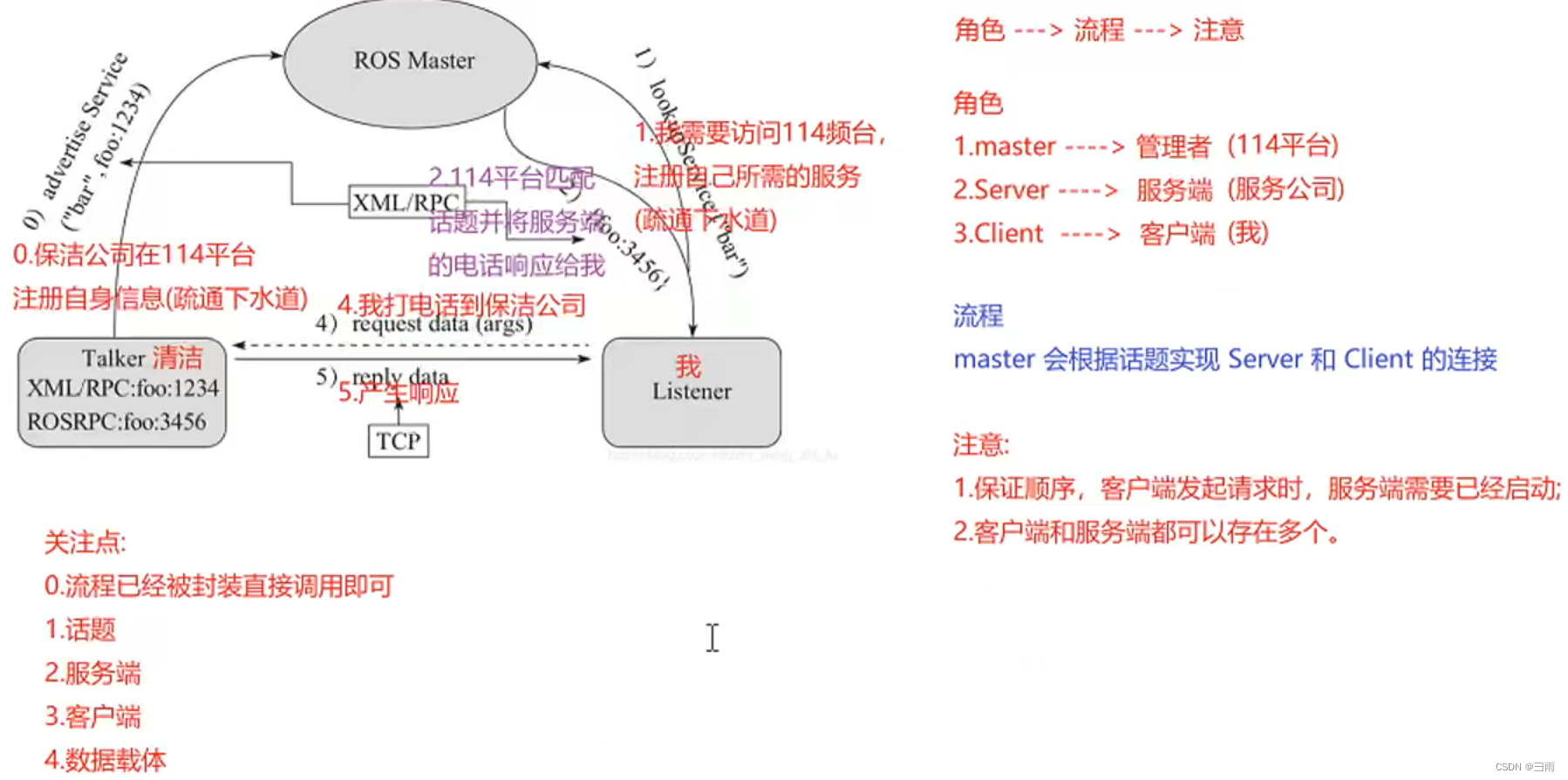
理解图:
二、自定义srv
需求:
服务通信中,客户端提交两个整数至服务端,服务端求和并响应结果到客户端,请创建服务器与客户端通信的数据载体。
流程:
srv 文件内的可用数据类型与 msg 文件一致,且定义 srv 实现流程与自定义 msg 实现流程类似:
- 按照固定格式创建srv文件
- 编辑配置文件
- 编译生成中间文件
1.定义srv文件
服务通信中,数据分成两部分,请求与响应,在 srv 文件中请求和响应使用—分割,具体实现如下:
功能包下新建 srv 目录,添加 xxx.srv 文件,内容:
# 客户端请求时发送的两个数字
int32 num1
int32 num2
---
# 服务器响应发送的数据
int32 sum
2.编辑配置文件
package.xml中添加编译依赖与执行依赖
<build_depend>message_generation</build_depend><exec_depend>message_runtime</exec_depend><!-- exce_depend 以前对应的是 run_depend 现在非法-->
CMakeLists.txt编辑 srv 相关配置
find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgsmessage_generation
)
# 需要加入 message_generation,必须有 std_msgs
add_service_files(FILESAddInts.srv
)
generate_messages(DEPENDENCIESstd_msgs
)
注意: 官网没有在 catkin_package 中配置 message_runtime,经测试配置也可以
3.编译
编译后的中间文件查看:
C++ 需要调用的中间文件(…/工作空间/devel/include/包名/xxx.h)

Python 需要调用的中间文件(…/工作空间/devel/lib/python3/dist-packages/包名/srv)

后续调用相关 srv 时,是从这些中间文件调用的
三、C++实现
需求:
编写服务通信,客户端提交两个整数至服务端,服务端求和并响应结果到客户端。
分析:
在模型实现中,ROS master 不需要实现,而连接的建立也已经被封装了,需要关注的关键点有三个:
- 服务端
- 客户端
- 数据
流程:
- 编写服务端实现;
- 编写客户端实现;
- 编辑配置文件;
- 编译并执行。
0.vscode配置
需要像之前自定义 msg 实现一样配置c_cpp_properies.json 文件,如果以前已经配置且没有变更工作空间,可以忽略,如果需要配置,配置方式与之前相同:
{"configurations": [{"browse": {"databaseFilename": "","limitSymbolsToIncludedHeaders": true},"includePath": ["/opt/ros/noetic/include/**","/usr/include/**","/xxx/yyy工作空间/devel/include/**" //配置 head 文件的路径 ],"name": "ROS","intelliSenseMode": "gcc-x64","compilerPath": "/usr/bin/gcc","cStandard": "c11","cppStandard": "c++17"}],"version": 4
}
1.服务端
/*需求: 编写两个节点实现服务通信,客户端节点需要提交两个整数到服务器服务器需要解析客户端提交的数据,相加后,将结果响应回客户端,客户端再解析服务器实现:1.包含头文件2.初始化 ROS 节点3.创建 ROS 句柄4.创建 服务 对象5.回调函数处理请求并产生响应6.由于请求有多个,需要调用 ros::spin()*/
#include "ros/ros.h"
#include "demo03_server_client/AddInts.h"// bool 返回值由于标志是否处理成功
bool doReq(demo03_server_client::AddInts::Request& req,demo03_server_client::AddInts::Response& resp){int num1 = req.num1;int num2 = req.num2;ROS_INFO("服务器接收到的请求数据为:num1 = %d, num2 = %d",num1, num2);//逻辑处理if (num1 < 0 || num2 < 0){ROS_ERROR("提交的数据异常:数据不可以为负数");return false;}//如果没有异常,那么相加并将结果赋值给 respresp.sum = num1 + num2;return true;}int main(int argc, char *argv[])
{setlocale(LC_ALL,"");// 2.初始化 ROS 节点ros::init(argc,argv,"AddInts_Server");// 3.创建 ROS 句柄ros::NodeHandle nh;// 4.创建 服务 对象ros::ServiceServer server = nh.advertiseService("AddInts",doReq);ROS_INFO("服务已经启动....");// 5.回调函数处理请求并产生响应// 6.由于请求有多个,需要调用 ros::spin()ros::spin();return 0;
}
2.客户端
/*需求: 编写两个节点实现服务通信,客户端节点需要提交两个整数到服务器服务器需要解析客户端提交的数据,相加后,将结果响应回客户端,客户端再解析服务器实现:1.包含头文件2.初始化 ROS 节点3.创建 ROS 句柄4.创建 客户端 对象5.请求服务,接收响应*/
// 1.包含头文件
#include "ros/ros.h"
#include "demo03_server_client/AddInts.h"int main(int argc, char *argv[])
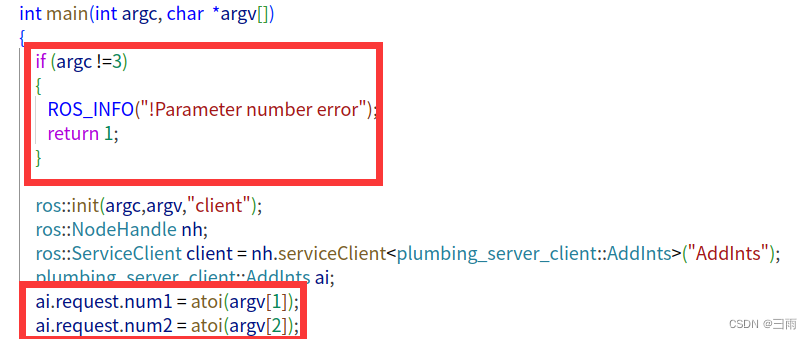
{setlocale(LC_ALL,"");// 调用时动态传值,如果通过 launch 的 args 传参,需要传递的参数个数 +3if (argc != 3)// if (argc != 5)//launch 传参(0-文件路径 1传入的参数 2传入的参数 3节点名称 4日志路径){ROS_ERROR("请提交两个整数");return 1;}// 2.初始化 ROS 节点ros::init(argc,argv,"AddInts_Client");// 3.创建 ROS 句柄ros::NodeHandle nh;// 4.创建 客户端 对象ros::ServiceClient client = nh.serviceClient<demo03_server_client::AddInts>("AddInts");//等待服务启动成功//方式1ros::service::waitForService("AddInts");//方式2// client.waitForExistence();// 5.组织请求数据demo03_server_client::AddInts ai;ai.request.num1 = atoi(argv[1]);ai.request.num2 = atoi(argv[2]);// 6.发送请求,返回 bool 值,标记是否成功bool flag = client.call(ai);// 7.处理响应if (flag){ROS_INFO("请求正常处理,响应结果:%d",ai.response.sum);}else{ROS_ERROR("请求处理失败....");return 1;}return 0;
}3.配置 CMakeLists.txt
add_executable(AddInts_Server src/AddInts_Server.cpp)
add_executable(AddInts_Client src/AddInts_Client.cpp)add_dependencies(AddInts_Server ${PROJECT_NAME}_gencpp)
add_dependencies(AddInts_Client ${PROJECT_NAME}_gencpp)target_link_libraries(AddInts_Server${catkin_LIBRARIES}
)
target_link_libraries(AddInts_Client${catkin_LIBRARIES}
)4.执行
流程:
- 需要先启动服务:rosrun 包名 服务
- 然后再调用客户端 :rosrun 包名 客户端 参数1 参数2
结果:
- 会根据提交的数据响应相加后的结果。
注意:
- 如果先启动客户端,那么会导致运行失败
优化:
-
在客户端发送请求前添加:client.waitForExistence();

-
或:ros::service::waitForService(“AddInts”);

这是一个阻塞式函数,只有服务启动成功后才会继续执行
此处可以使用 launch 文件优化,但是需要注意 args 传参特点
1.不知道为啥报错

但由于这个错误会影响C++程序编写,只能把该相对路径改为绝对路径
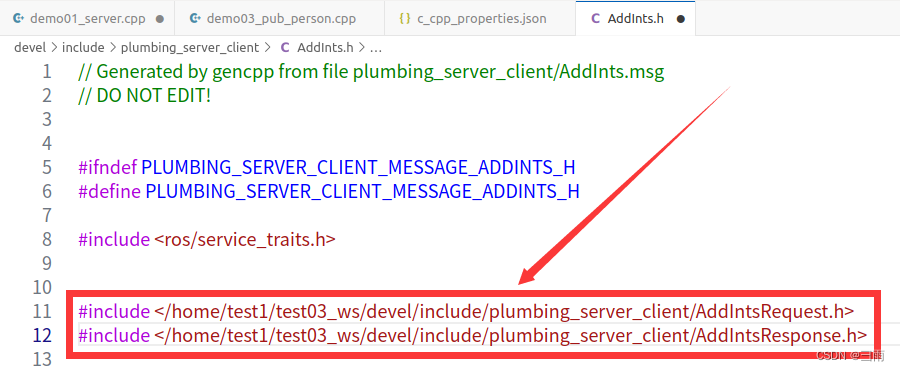
发现问题了!!!!!,include path 不知道什么时候被我多打了一个s。
2.在使用rosservice测试的时候未能自动补齐两个数。
解决:先source一下,然后在输入addInts后空一格,然后tab键同时按两次即可补齐

3.main函数中argc代表传入的参数的总数量,在本例中,第一个参数指程序名,第二个参数是12,第三个参数是34,所以argc是3。argv中保存的为参数具体值。通过atoi将字符串类型的参数转换为整型。

4.Alt+方向键:可快速移动整行代码
四、Python实现
0.vscode配置
需要像之前自定义 msg 实现一样配置settings.json 文件,如果以前已经配置且没有变更工作空间,可以忽略,如果需要配置,配置方式与之前相同:
{"python.autoComplete.extraPaths": ["/opt/ros/noetic/lib/python3/dist-packages",]
}
1.服务端
#! /usr/bin/env python
"""需求: 编写两个节点实现服务通信,客户端节点需要提交两个整数到服务器服务器需要解析客户端提交的数据,相加后,将结果响应回客户端,客户端再解析服务器端实现:1.导包2.初始化 ROS 节点3.创建服务对象4.回调函数处理请求并产生响应5.spin 函数"""
# 1.导包
import rospy
from demo03_server_client.srv import AddInts,AddIntsRequest,AddIntsResponse
# 回调函数的参数是请求对象,返回值是响应对象
def doReq(req):# 解析提交的数据sum = req.num1 + req.num2rospy.loginfo("提交的数据:num1 = %d, num2 = %d, sum = %d",req.num1, req.num2, sum)# 创建响应对象,赋值并返回# resp = AddIntsResponse()# resp.sum = sumresp = AddIntsResponse(sum)return respif __name__ == "__main__":# 2.初始化 ROS 节点rospy.init_node("addints_server_p")# 3.创建服务对象server = rospy.Service("AddInts",AddInts,doReq)# 4.回调函数处理请求并产生响应# 5.spin 函数rospy.spin()
2.客户端
#! /usr/bin/env python"""需求: 编写两个节点实现服务通信,客户端节点需要提交两个整数到服务器服务器需要解析客户端提交的数据,相加后,将结果响应回客户端,客户端再解析客户端实现:1.导包2.初始化 ROS 节点3.创建请求对象4.发送请求5.接收并处理响应优化:加入数据的动态获取"""
#1.导包
import rospy
from demo03_server_client.srv import *
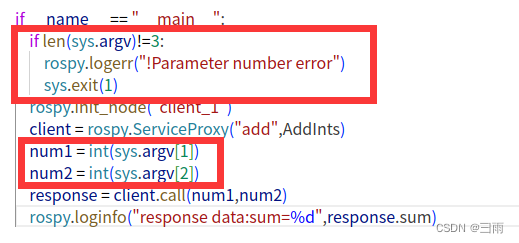
import sysif __name__ == "__main__":#优化实现if len(sys.argv) != 3:rospy.logerr("请正确提交参数")sys.exit(1)# 2.初始化 ROS 节点rospy.init_node("AddInts_Client_p")# 3.创建请求对象client = rospy.ServiceProxy("AddInts",AddInts)# 请求前,等待服务已经就绪# 方式1:# rospy.wait_for_service("AddInts")# 方式2client.wait_for_service()# 4.发送请求,接收并处理响应# 方式1# resp = client(3,4)# 方式2# resp = client(AddIntsRequest(1,5))# 方式3req = AddIntsRequest()# req.num1 = 100# req.num2 = 200 #优化req.num1 = int(sys.argv[1])req.num2 = int(sys.argv[2]) resp = client.call(req)rospy.loginfo("响应结果:%d",resp.sum)3.设置权限
终端下进入 scripts 执行:chmod +x *.py
4.配置 CMakeLists.txt
catkin_install_python(PROGRAMSscripts/AddInts_Server_p.py scripts/AddInts_Client_p.pyDESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
5.执行
流程:
- 需要先启动服务:rosrun 包名 服务
- 然后再调用客户端 :rosrun 包名 客户端 参数1 参数2
结果:
- 会根据提交的数据响应相加后的结果。
1.在对发布方测试时,num1:40 冒号后面的空格一定不能删,不然会被认为是str类型
2.sys显示未定义,应在头文件import sys

3.优化
动态参数传入:
客户端先启动不会报异常,会挂起等待服务端启动

参考:
[1]Autolabor-ROS机器人入门课程《ROS理论与实践》季基础教程
[2]【Autolabor初级教程】ROS机器人入门
[3]胡春旭.ROS机器人开发实践[M].机械工业出版社,2018.
相关文章:
ROS-ROS通信机制-服务通信
文章目录 一、服务通信基本知识二、自定义srv三、C实现四、Python实现 一、服务通信基本知识 服务通信也是ROS中一种极其常用的通信模式,服务通信是基于请求响应模式的,是一种应答机制。也即: 一个节点A向另一个节点B发送请求,B接收处理请求…...
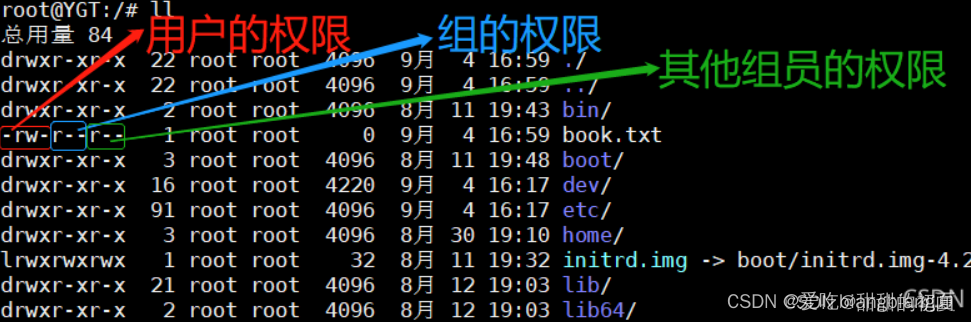
chown和chmod
chown和chmod都是在Linux和Unix系统中用于设置文件和文件夹权限的命令,但它们的功能和用途有所不同。 功能:chown主要用于修改文件或文件夹的所有者和所属组,而chmod则主要用于修改文件或文件夹的读写执行权限。用途:如果想要授权…...

【GPU】linux 安装、卸载 nvidia 显卡驱动、cuda 的官方文档、推荐方式(runfile)
文章目录 1. 显卡驱动1.1. 各版本下载地址1.2. 各版本文档地址1.3. 安装、卸载方式 2. CUDA2.1. 各版本下载地址2.2. 各版本文档地址2.3. 安装、卸载方式2.4. 多版本 CUDA 切换方式 1. 显卡驱动 1.1. 各版本下载地址 https://www.nvidia.com/Download/Find.aspx?langzh-cn 1…...
6页手写笔记总结信号与系统常考知识大题知识点
题型一 判断系统特性题型二 求系统卷积题型三 求三大变换正反变换题型四 求全响应题型五 已知微分方程求系统传递函数题型六 已知系统的传递函数求微分方程题型七 画出系统的零极点图,并判断系统的因果性和稳定性 (笔记适合快速复习,可能会有…...

Qt-QSplitter正确设置比例
简短版本: splitter->setSizes({1000, 2000}); // 这个值至少跟像素值设置的一样大,或者更大,例如x10倍详细版本: setSizes 官方介绍如下: Sets the child widgets’ respective sizes to the values given in the…...

一篇吃透大厂面试题,2024找工作一帆风顺。
🏆作者简介,普修罗双战士,一直追求不断学习和成长,在技术的道路上持续探索和实践。 🏆多年互联网行业从业经验,历任核心研发工程师,项目技术负责人。 🎉欢迎 👍点赞✍评论…...

【1day】用友 U8 Cloud系统TaskTreeQuery接口SQL注入漏洞学习
注:该文章来自作者日常学习笔记,请勿利用文章内的相关技术从事非法测试,如因此产生的一切不良后果与作者无关。 目录 一、漏洞描述 二、影响版本 三、资产测绘 四、漏洞复现...

华为快应用中自定义Slider效果
文章目录 一、前言二、实现代码三、参考链接 一、前言 在华为快应用中官方提供了<slider>控件,但是这个控件的限制比较多,比如滑块无法自定义,所以这里进行下自定义,自己修改样式。 二、实现代码 整体效果如下: 源码如下…...
C语言每日一题(43)旋转链表
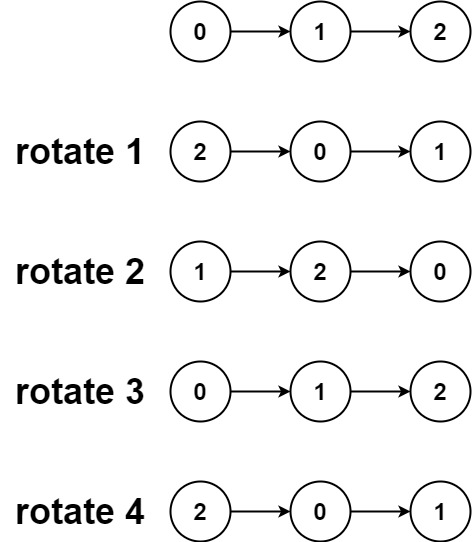
力扣 61 旋转链表 题目描述 给你一个链表的头节点 head ,旋转链表,将链表每个节点向右移动 k 个位置。 示例 1: 输入:head [1,2,3,4,5], k 2 输出:[4,5,1,2,3]示例 2: 输入:head [0,1,2], …...

CCF计算机软件能力认证考试—202209-1如此编码
题目背景 某次测验后,顿顿老师在黑板上留下了一串数字 23333 便飘然而去。凝望着这个神秘数字,小 P 同学不禁陷入了沉思…… 题目描述 已知某次测验包含 � 道单项选择题,其中第 � 题(1≤�≤&…...
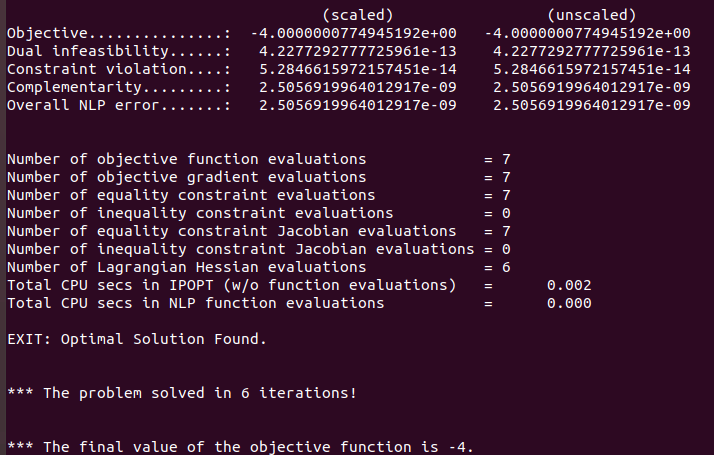
Ubuntu18.04安装Ipopt-3.12.8流程
本文主要介绍在Ubuntu18.04中安装Ipopt库的流程,及过程报错的解决方法,已经有很多关于Ipopt安装的博客,但经过我的测试,很多都失效了,经过探索,找到可流畅的安装Ipopt的方法,总结成本篇博客。 …...
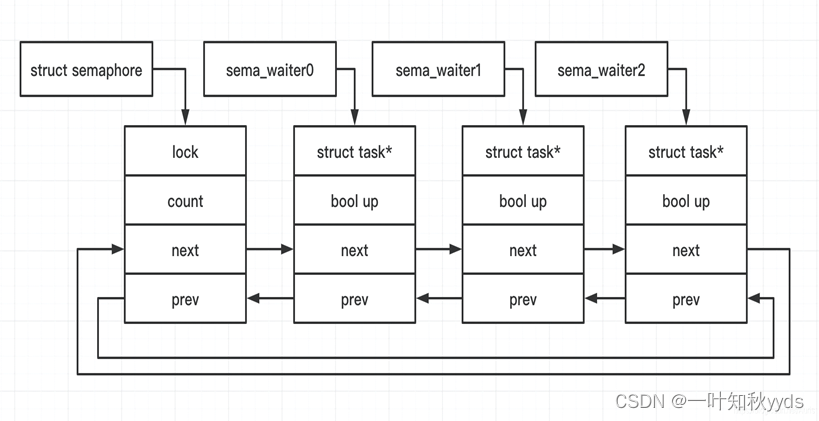
linux 内核同步互斥技术之信号量
信号量 信号量允许多个进程同时进入临界区,大多数情况下只允许一个进程进入临界区,把信号量的计数值设置为 1,即二值信号量,这种信号量称为互斥信号量。可允许多个锁持有者。 和自旋锁相比,信号量适合保护比较长的临界…...

交通强国添力量 无人机巡航为何备受期待?
在高速建设交通强国的过程中,交通运输部海事局计划完善“陆海空天”一体化水上交通运输安全保障体系。无人机巡航系统将在提升海事船舶监管和水上搜救能力方面发挥关键作用,以构建更为全面的监管体系。尽管已初步建立了海事监管体系,但仍存在…...

【PID学习笔记 6 】控制系统的性能指标之二
写在前面 上文介绍了控制系统的稳态与动态、过渡过程、阶跃响应以及阶跃信号作用下过渡过程的四种形式。本文紧接上文,首先总结过渡过程的分类,然后介绍控制系统的性能评价,最后重点介绍控制系统性能指标中的单项指标。 一、过渡过程的分类…...
ZLMediakit-method ANNOUNCE failed: 401 Unauthorized(ffmpeg、obs推流rtmp到ZLM发现的问题)
错误截图 解决办法:能推流成功,但是不能写入到wvp数据库中 修改配置文件config.ini 改成0 修改之后 重启服务 systemctl restart zlm*推流成功 解决办法:能推流,能写入数据库中 替换zlm版本,可以用我文章中提供的编译…...

聊聊logback的ThrowableProxyConverter
序 本文主要研究一下logback的ThrowableProxyConverter ThrowableHandlingConverter ch/qos/logback/classic/pattern/ThrowableHandlingConverter.java /*** Converter which handle throwables should be derived from this class.**/ public abstract class ThrowableHa…...

Kubernetes(k8s)访问不了Pod服务
在k8s集群部署java web应用的服务时,浏览器访问不了pod服务或linux终端curl http://192.168.138.112:30000即curl http://ip地址:端口号失败,如下图: 在网上找了很久的答案,最后还是没解决,后来突然想起来一直是在k8…...
python-学生管理|汉罗塔
1.编写程序,实现学生信息管理系统。 运行程序,在控制台输入“1”之后的结果如下所示: 学生管理系统 1.添加学生信息 2.删除学生信息 3.修改学生信息 4.显示所有学生信息 0.退出系统 请选择功能:1 请输入新学生的姓名:小红 请输入…...

python 堆与栈
【一】堆与栈 【 1 】简介 栈(stack),有些地方称为堆栈,是一种容器,可存入数据元素、访问元素、删除元素,它的特点在于只能允许在容器的一端(称为栈顶端指标,英语:top&a…...
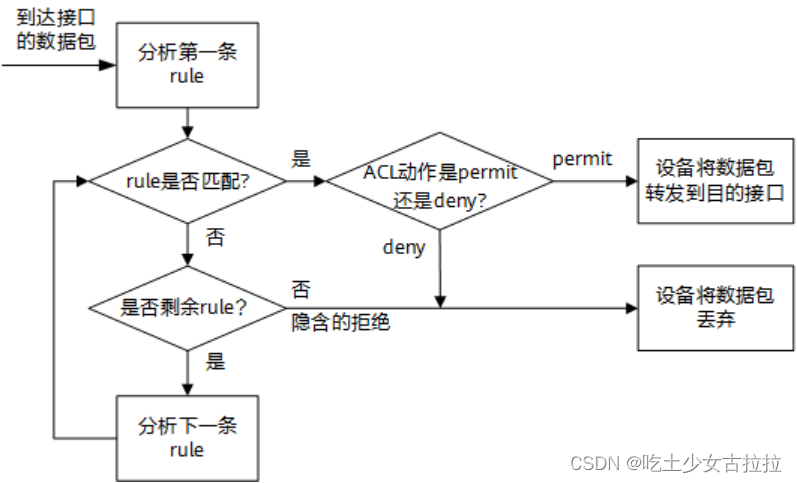
园区规划技术要点
(一)技术点介绍 1.WLAN:无线局域网WLAN(Wireless Local Area Network)是一种无线计算机网络,使用无线信道代替有线传输介质连接两个或多个设备形成一个局域网LAN(Local Area Network)…...

SpringBoot-17-MyBatis动态SQL标签之常用标签
文章目录 1 代码1.1 实体User.java1.2 接口UserMapper.java1.3 映射UserMapper.xml1.3.1 标签if1.3.2 标签if和where1.3.3 标签choose和when和otherwise1.4 UserController.java2 常用动态SQL标签2.1 标签set2.1.1 UserMapper.java2.1.2 UserMapper.xml2.1.3 UserController.ja…...

AI-调查研究-01-正念冥想有用吗?对健康的影响及科学指南
点一下关注吧!!!非常感谢!!持续更新!!! 🚀 AI篇持续更新中!(长期更新) 目前2025年06月05日更新到: AI炼丹日志-28 - Aud…...
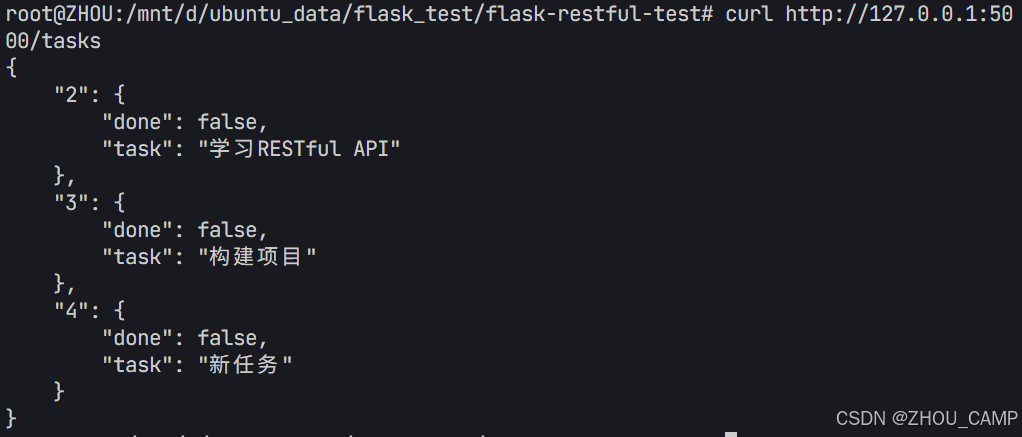
Flask RESTful 示例
目录 1. 环境准备2. 安装依赖3. 修改main.py4. 运行应用5. API使用示例获取所有任务获取单个任务创建新任务更新任务删除任务 中文乱码问题: 下面创建一个简单的Flask RESTful API示例。首先,我们需要创建环境,安装必要的依赖,然后…...

MySQL 隔离级别:脏读、幻读及不可重复读的原理与示例
一、MySQL 隔离级别 MySQL 提供了四种隔离级别,用于控制事务之间的并发访问以及数据的可见性,不同隔离级别对脏读、幻读、不可重复读这几种并发数据问题有着不同的处理方式,具体如下: 隔离级别脏读不可重复读幻读性能特点及锁机制读未提交(READ UNCOMMITTED)允许出现允许…...

多场景 OkHttpClient 管理器 - Android 网络通信解决方案
下面是一个完整的 Android 实现,展示如何创建和管理多个 OkHttpClient 实例,分别用于长连接、普通 HTTP 请求和文件下载场景。 <?xml version"1.0" encoding"utf-8"?> <LinearLayout xmlns:android"http://schemas…...

Objective-C常用命名规范总结
【OC】常用命名规范总结 文章目录 【OC】常用命名规范总结1.类名(Class Name)2.协议名(Protocol Name)3.方法名(Method Name)4.属性名(Property Name)5.局部变量/实例变量(Local / Instance Variables&…...

条件运算符
C中的三目运算符(也称条件运算符,英文:ternary operator)是一种简洁的条件选择语句,语法如下: 条件表达式 ? 表达式1 : 表达式2• 如果“条件表达式”为true,则整个表达式的结果为“表达式1”…...

五年级数学知识边界总结思考-下册
目录 一、背景二、过程1.观察物体小学五年级下册“观察物体”知识点详解:由来、作用与意义**一、知识点核心内容****二、知识点的由来:从生活实践到数学抽象****三、知识的作用:解决实际问题的工具****四、学习的意义:培养核心素养…...
如何将联系人从 iPhone 转移到 Android
从 iPhone 换到 Android 手机时,你可能需要保留重要的数据,例如通讯录。好在,将通讯录从 iPhone 转移到 Android 手机非常简单,你可以从本文中学习 6 种可靠的方法,确保随时保持连接,不错过任何信息。 第 1…...

WordPress插件:AI多语言写作与智能配图、免费AI模型、SEO文章生成
厌倦手动写WordPress文章?AI自动生成,效率提升10倍! 支持多语言、自动配图、定时发布,让内容创作更轻松! AI内容生成 → 不想每天写文章?AI一键生成高质量内容!多语言支持 → 跨境电商必备&am…...