华清远见嵌入式学习——ARM——作业3
作业要求:
代码效果图:

代码:
led.h
#ifndef __LED_H__
#define __LED_H__#define RCC_GPIO (*(unsigned int *)0x50000a28)
#define GPIOE_MODER (*(unsigned int *)0x50006000)
#define GPIOF_MODER (*(unsigned int *)0x50007000)
#define GPIOE_OTYPER (*(unsigned int *)0x50006004)
#define GPIOF_OTYPER (*(unsigned int *)0x50007004)
#define GPIOE_OSPEEDR (*(unsigned int *)0x50006008)
#define GPIOF_OSPEEDR (*(unsigned int *)0x50007008)
#define GPIOE_PUPDR (*(unsigned int *)0x5000600C)
#define GPIOF_PUPDR (*(unsigned int *)0x5000700c)
#define GPIOE_ODR (*(unsigned int *)0x50006014)
#define GPIOF_ODR (*(unsigned int *)0x50007014)void all_led_init();
void led1_on();
void led1_off();
void led2_on();
void led2_off();
void led3_on();
void led3_off();#endifled.c
#include "led.h"
void all_led_init()
{RCC_GPIO |= (0X3<<4);//时钟使能GPIOE_MODER &=(~(0X3<<20));//设置PE10输出GPIOE_MODER |= (0X1<<20);//设置PE10为推挽输出GPIOE_OTYPER &=(~(0x1<<10));//PE10为低速输出GPIOE_OSPEEDR &= (~(0x3<<20));//设置无上拉下拉GPIOE_PUPDR &= (~(0x3<<20));//LED2GPIOF_MODER &=(~(0X3<<20));//设置Pf10输出GPIOF_MODER |= (0X1<<20);//设置Pf10为推挽输出GPIOF_OTYPER &=(~(0x1<<10));//Pf10为低速输出GPIOF_OSPEEDR &= (~(0x3<<20));//设置无上拉下拉GPIOF_PUPDR &= (~(0x3<<20));//LED3GPIOE_MODER &=(~(0X3<<16));//设置PE8输出GPIOE_MODER |= (0X1<<16);//设置PE8为推挽输出GPIOE_OTYPER &=(~(0x1<<8));//PE8为低速输出GPIOE_OSPEEDR &= (~(0x3<16));//设置无上拉下拉GPIOE_PUPDR &= (~(0x3<<16));
}
void led1_on()
{GPIOE_ODR |= (0x1<<10);
}void led1_off()
{GPIOE_ODR &= (~(0x1<<10));
}
void led2_on()
{GPIOF_ODR |= (0x1<<10);
}void led2_off()
{GPIOF_ODR &= (~(0x1<<10));
}
void led3_on()
{GPIOE_ODR |= (0x1<<8);
}void led3_off()
{GPIOE_ODR &= (~(0x1<<8));
}uart.h
#ifndef __UART4_H__
#define __UART4_H__
#include"stm32mp1xx_rcc.h"
#include"stm32mp1xx_gpio.h"
#include"stm32mp1xx_uart.h"void uart4_config();
void putchar(char a);
char getchar();
void gets(char *s);
void puts(char *s);
int strcmp(char *s1,char *s2);
#endifuart.c
#include"uart4.h"//uart4的相关配置
void uart4_config()
{//1.使能GPIOB\GPIOG\UART4外设时钟RCC->MP_AHB4ENSETR |= (0x1<<1);//gpiobRCC->MP_AHB4ENSETR |= (0x1<<6);//gpiogRCC->MP_APB1ENSETR |= (0x1<<16);//uart4//2.设置PB2\PG11用于UART4的管脚复用//设置PG11GPIOG->MODER &= (~(0x3<<22));GPIOG->MODER |= (0x2<<22);GPIOG->AFRH &= (~(0xf<<12));GPIOG->AFRH |= (0x6<<12);//设置PB2GPIOB->MODER &= (~(0x3<<4));GPIOB->MODER |= (0x2<<4);GPIOB->AFRL &= (~(0xF<<8));GPIOB->AFRL |= (0x8<<8);//禁用串口USART4->CR1 &= (~0x1);//3.设置数据位宽为8位USART4->CR1 &= (~(0x1<<12));USART4->CR1 &= (~(0x1<<28));//4.设置无奇偶校验位USART4->CR1 &= (~(0x1<<10));//5.设置16倍过采样USART4->CR1 &= (~(0x1<<15));//6.设置1位停止位USART4->CR2 &= (~(0x3<<12));//7.设置不分频USART4->PRESC &= (~0xf);//8.设置波特率为115200USART4->BRR=0X22B;//9.使能发送器USART4->CR1 |= (0x1<<3);//10.使能接收器USART4->CR1 |= (0x1<<2);//11.使能串口USART4->CR1 |= (0x1);
}void putchar(char a)
{//1.先判断发送器是否为空,不为空等待while(!(USART4->ISR &(0x1<<7)));//2.向发送寄存器写入数据USART4->TDR=a;//3.等待发送完成while(!(USART4->ISR &(0x1<<6)));
}char getchar()
{char a;//1.判断接收器是否有准备好的数据,没有就等待while(!(USART4->ISR &(0x1<<5)));//2.读取数据a=USART4->RDR;//3.返回return a;
}//发送一个字符串
void puts(char *s)
{while(*s){putchar(*s);s++;}putchar('\r');putchar('\n');
}//接收一个字符串
void gets(char *s)
{while(1){*s=getchar();putchar(*s);//键盘输入的内容在串口上回显if(*s=='\r')break;s++;}*s='\0';}//实现字符串比较
int strcmp(char *s1,char *s2)
{int i = 0;while(((*(s1+i))==(*(s2+i)))){i++;if( (*(s1+i)=='\0')){break;}}int sub = ((*(s1+i))-(*(s2+i)));if(sub>0){return sub;}else if(sub<0){return sub;}else{return 0; }
}main.c
#include "uart4.h"
#include "led.h"int main()
{char buf[128];char *ledon1 = "led1on";char *ledon2 = "led2on";char *ledon3 = "led3on";char *ledoff1 = "led1off";char *ledoff2 = "led2off";char *ledoff3 = "led3off";uart4_config();all_led_init();while (1){gets(buf); // 读取字符串puts(buf); // 打印字符串//判断字符串,确定灯的亮与灭if((strcmp(buf,ledon1) == 0)) //一号灯亮{led1_on();}else if((strcmp(buf,ledoff1) == 0)) //一号灯灭{led1_off();}else if((strcmp(buf,ledon2) == 0)) //二号灯亮{led2_on();}else if((strcmp(buf,ledoff2) == 0)) //二号灯灭{led2_off();}else if((strcmp(buf,ledon3) == 0)) //三号灯亮{led3_on();}else if((strcmp(buf,ledoff3) == 0)) //三号灯灭{led3_off();} }
}
相关文章:
华清远见嵌入式学习——ARM——作业3
作业要求: 代码效果图: 代码: led.h #ifndef __LED_H__ #define __LED_H__#define RCC_GPIO (*(unsigned int *)0x50000a28) #define GPIOE_MODER (*(unsigned int *)0x50006000) #define GPIOF_MODER (*(unsigned int *)0x50007000) #defi…...

19.JavaSE
一、JavaSE。 (1)IO流。 1.字节字符流 2.标准流打印流对象流 (2)集合。 1.List/Set/Queue/Map集合 2.properties集合 (3)多线程。 1.线程创建的…...

仓库管理用什么软件
仓库管理是一个非常重要的话题,大到企业,小到个人,只要有货物的往来就会有仓库方面的管理,最为典型的就是货物的进出库存管理,这也是最为基础的仓库管理内容,那么仓库管理要用什么软件,从不同的…...

飞天使-k8s知识点8-kubernetes资源对象-编写中
文章目录 资源对象是k8s核心概念 资源对象是k8s核心概念 查看防火墙规则 32002 端口的去向 [rootkubeadm-master1 ~]# iptables -t nat -vnL |grep 32000 0 KUBE-MARK-MASQ tcp -- * * 0.0.0.0/0 0.0.0.0/0 /* kubernetes-dashboard/…...

Oracle Create user
sqlplus /nolog conn sys/pw123456orcl as sysdba CREATE USER zengwenfeng IDENTIFIED BY zengwenfeng ; GRANT ALL PRIVILEGES TO zengwenfeng ; COMMIT; C:\Users\Administrator>sqlplus /nologSQL*Plus: Release 11.2.0.1.0 Production on 星期日 12月 24 21:38:24 20…...

树莓派,mediapipe,Picamera2利用舵机云台追踪人手(PID控制)
一、项目目标 追踪人手大拇指指尖: 当人手移动时,摄像头通过控制两个伺服电机(分别是偏航和俯仰)把大拇指指尖放到视界的中心位置,本文采用了PID控制伺服电机 Mediapipe Hand简介 MediaPipe 手部标志任务可检测图像…...
DQL查询数据(超重点)以及distinct(去重)
DQL(Data Query Language:数据查询语言) 1.所有查询操作都用 SELECT 2.无论是简单的查询还是复杂的查询它都能做 3.数据库中最核心的语言,最重要的语句 4.使用频率最高的语句 语法: SELECT 字段1,字段2,……FROM 表 有时候…...

【网络奇缘】——奈氏准则和香农定理从理论到实践一站式服务|计算机网络
🌈个人主页: Aileen_0v0 🔥热门专栏: 华为鸿蒙系统学习|计算机网络|数据结构与算法 💫个人格言:"没有罗马,那就自己创造罗马~" 目录 失真 - 信号的变化 影响信号失真的因素: 编辑 失真的一种现象:码间…...

MongoDB 根据 _id 获取记录的创建时间并回填记录中
MongoDB 集合 test1,有字段 _id,createTime,createTimeStr,name字段 , 查询createTime不为空的,根据 _id 生成该条记录的创建时间时间戳并填写到字段 createTime 字段中 ,并打印时间戳 // 查询 createTime…...

【开源】基于JAVA语言的独居老人物资配送系统
目录 一、摘要1.1 项目介绍1.2 项目录屏 二、功能模块三、系统展示四、核心代码4.1 查询社区4.2 新增物资4.3 查询物资4.4 查询物资配送4.5 新增物资配送 五、免责说明 一、摘要 1.1 项目介绍 基于JAVAVueSpringBootMySQL的独居老人物资配送系统,包含了社区档案、…...
网络7层架构
网络 7 层架构 什么是OSI七层模型? OSI模型用于定义并理解数据从一台计算机转移到另一台计算机,在最基本的形式中,两台计算机通过网线和连接器相互连接,在网卡的帮助下共享数据,形成一个网络,但是一台计算…...
【Arthas】Arthas线上trace匿名函数/Lambda表达式/函数式接口
前言 Arthas是一个非常牛B的东西,我非常喜欢用,特别是在定位线上问题的时候,牛逼大发! 非常建议所有Java玩家都去学习一下 阅读对象 了解并使用过Arthas了解并使用过trace命令 先说结论 先说结论,lambda表达式的追…...

阿里云“块存储”是系统盘和数据盘的意思
阿里云“块存储”是什么意思?块存储是指阿里云服务器的系统盘或数据盘。块存储EBS(Elastic Block Storage)是为云服务器ECS提供的低时延、持久性、高可靠的块级随机存储。块存储支持在可用区内自动复制您的数据,防止意外硬件故障导…...

AI赋能金融创新:ChatGPT引领量化交易新时代
文章目录 一、引言二、ChatGPT与量化交易的融合三、实践应用:ChatGPT在量化交易中的成功案例四、挑战与前景五、结论《AI时代Python量化交易实战:ChatGPT让量化交易插上翅膀》📚→ [当当](http://product.dangdang.com/29658180.html) | [京东…...

数字化时代的探索:学生为何对数据可视化趋之若鹜?
随着信息时代的迅猛发展,数据已经成为我们生活中不可或缺的一部分。而在这个数字化浪潮中,越来越多的学生开始关注数据可视化,这并非偶然。下面,我就从可视化从业者的角度出发,简单聊聊为什么越来越多的学生开始关注数…...

vue2、vue3实现用aws s3协议操作minio进行文件存储和读取
亚马逊s3 API文档 最开始安装了aws-sdk/client-s3,但是不知道为什么一直报错,所以用了aws-sdk 准备工作: 需要已经搭建好minio、创建好桶 1. vue2 安装插件 yarn add aws-sdk s3配置 var AWS require("aws-sdk"); AWS.co…...

宏集应用 | 如何通过振动传感器防止造纸工业中的意外故障?
来源:宏集科技 工业物联网 宏集应用 | 如何通过振动传感器防止造纸工业中的意外故障? 原文链接:https://mp.weixin.qq.com/s/Z2qSdJnPLdOxJuG5qz-JJA 欢迎关注虹科,为您提供最新资讯! 一 应用背景 在造纸工业中&…...

【华为OD题库-110】反转每对括号间的子串-java
题目 给出一个字符串s(仅含有小写英文字母和括号)。 请你按照从括号内到外的顺序,逐层反转每对匹配括号中的字符串,并返回最终的结果。注意,您的结果中不应包含任何括号。 示例1: 输入: s “(abcd)” 输出: “dcba” 示例2: 输入: s “(u(l…...

如何搭建一个高效的Python开发环境
“工欲善其事,必先利其器”,这里我们来搭建一套高效的 Python 开发环境,为后续的数据分析做准备。 关于高效作业,对于需要编写 Python 代码进行数据分析的工作而言,主要涉及两个方面。 1. 一款具备强大的自动完成和错…...

Reactor 和 Proactor模式,IO复用与epoll、同步IO,异步IO与协程
汽车软件中的CPU密集与IO密集任务 在汽车软件中,涉及到ADAS的长期占用CPU的计算任务可以算的上是CPU密集型。 另外的,众多SOA原子服务或者各种数据收集、处理、分发、log系统,应该算是IO密集型任务。 寻求一些手段优化IO性能的原因 在过去…...

DockerHub与私有镜像仓库在容器化中的应用与管理
哈喽,大家好,我是左手python! Docker Hub的应用与管理 Docker Hub的基本概念与使用方法 Docker Hub是Docker官方提供的一个公共镜像仓库,用户可以在其中找到各种操作系统、软件和应用的镜像。开发者可以通过Docker Hub轻松获取所…...
通过Wrangler CLI在worker中创建数据库和表
官方使用文档:Getting started Cloudflare D1 docs 创建数据库 在命令行中执行完成之后,会在本地和远程创建数据库: npx wranglerlatest d1 create prod-d1-tutorial 在cf中就可以看到数据库: 现在,您的Cloudfla…...
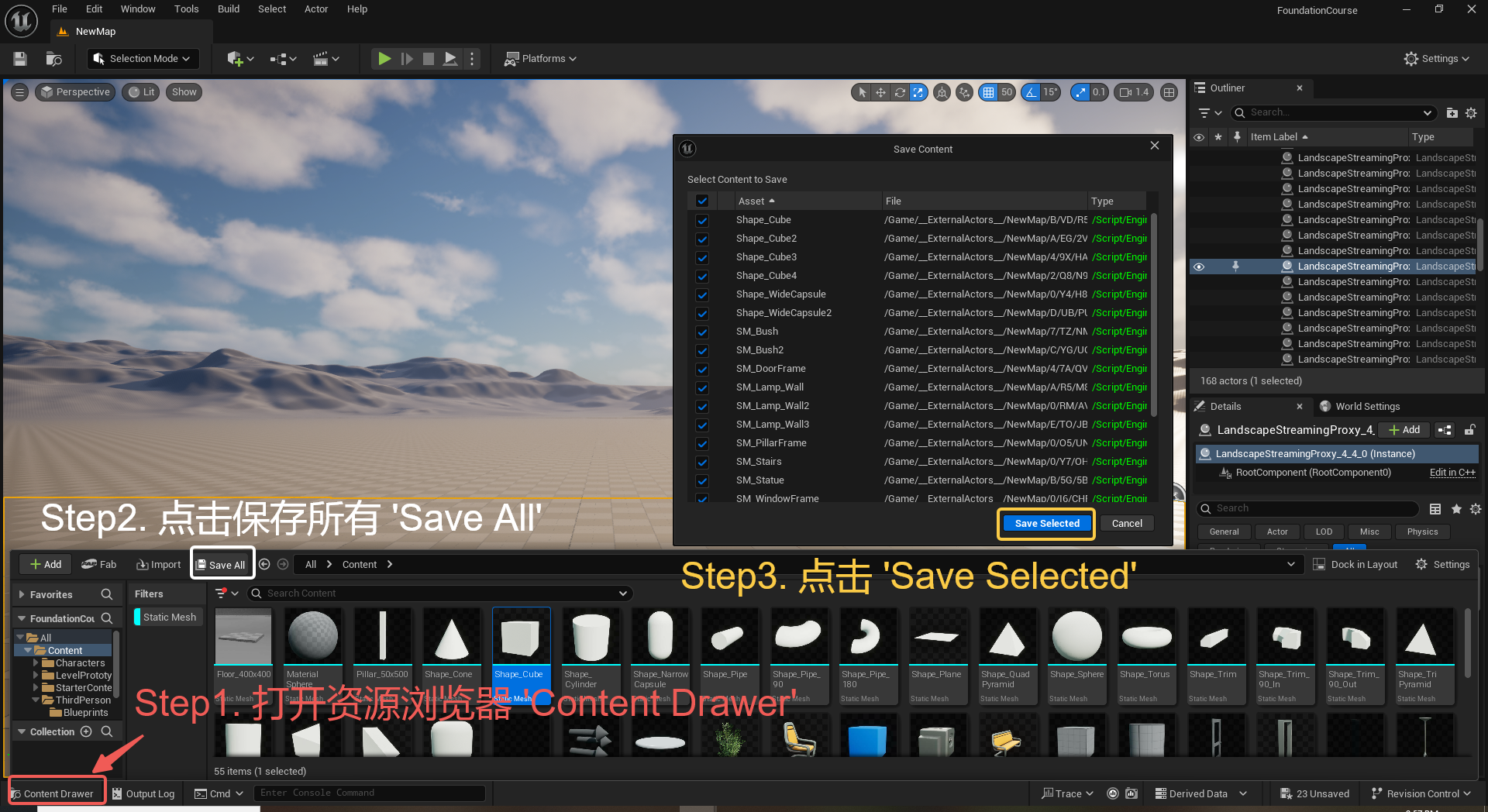
UE5 学习系列(三)创建和移动物体
这篇博客是该系列的第三篇,是在之前两篇博客的基础上展开,主要介绍如何在操作界面中创建和拖动物体,这篇博客跟随的视频链接如下: B 站视频:s03-创建和移动物体 如果你不打算开之前的博客并且对UE5 比较熟的话按照以…...

Go 语言接口详解
Go 语言接口详解 核心概念 接口定义 在 Go 语言中,接口是一种抽象类型,它定义了一组方法的集合: // 定义接口 type Shape interface {Area() float64Perimeter() float64 } 接口实现 Go 接口的实现是隐式的: // 矩形结构体…...

蓝牙 BLE 扫描面试题大全(2):进阶面试题与实战演练
前文覆盖了 BLE 扫描的基础概念与经典问题蓝牙 BLE 扫描面试题大全(1):从基础到实战的深度解析-CSDN博客,但实际面试中,企业更关注候选人对复杂场景的应对能力(如多设备并发扫描、低功耗与高发现率的平衡)和前沿技术的…...
安装docker)
Linux离线(zip方式)安装docker
目录 基础信息操作系统信息docker信息 安装实例安装步骤示例 遇到的问题问题1:修改默认工作路径启动失败问题2 找不到对应组 基础信息 操作系统信息 OS版本:CentOS 7 64位 内核版本:3.10.0 相关命令: uname -rcat /etc/os-rele…...

Linux 中如何提取压缩文件 ?
Linux 是一种流行的开源操作系统,它提供了许多工具来管理、压缩和解压缩文件。压缩文件有助于节省存储空间,使数据传输更快。本指南将向您展示如何在 Linux 中提取不同类型的压缩文件。 1. Unpacking ZIP Files ZIP 文件是非常常见的,要在 …...

Web中间件--tomcat学习
Web中间件–tomcat Java虚拟机详解 什么是JAVA虚拟机 Java虚拟机是一个抽象的计算机,它可以执行Java字节码。Java虚拟机是Java平台的一部分,Java平台由Java语言、Java API和Java虚拟机组成。Java虚拟机的主要作用是将Java字节码转换为机器代码&#x…...

MinIO Docker 部署:仅开放一个端口
MinIO Docker 部署:仅开放一个端口 在实际的服务器部署中,出于安全和管理的考虑,我们可能只能开放一个端口。MinIO 是一个高性能的对象存储服务,支持 Docker 部署,但默认情况下它需要两个端口:一个是 API 端口(用于存储和访问数据),另一个是控制台端口(用于管理界面…...

【学习笔记】erase 删除顺序迭代器后迭代器失效的解决方案
目录 使用 erase 返回值继续迭代使用索引进行遍历 我们知道类似 vector 的顺序迭代器被删除后,迭代器会失效,因为顺序迭代器在内存中是连续存储的,元素删除后,后续元素会前移。 但一些场景中,我们又需要在执行删除操作…...