超维空间S2无人机使用说明书——51、基础版——使用yolov8进行目标跟踪
引言:为了提高yolo识别的质量,提高了yolo的版本,改用yolov8进行物体识别,同时系统兼容了低版本的yolo,包括基于C++的yolov3和yolov4,以及yolov7。
简介,为了提高识别速度,系统采用了GPU进行加速,在使用7W功率的情况,大概可以稳定在20FPS,满功率情况下可以适当提高。
硬件:D435摄像头,Jetson orin nano 8G
环境:ubuntu20.04,ros-noetic, yolov8
注:目标跟随是在木根识别的基础上进行,因此本小节和yolov8识别小节类似,只是在此基础上添加了跟随控制程序
步骤一: 启动摄像头,获取摄像头发布的图像话题
roslaunch realsense2_camera rs_camera.launch
没有出现红色报错,出现如下界面,表明摄像头启动成功
步骤二:启动yolov8识别节点
roslaunch yolov8_ros yolo_v8.launch
launch文件如下,参数use_cpu设置为false,因为实际使用GPU加速,不是CPU跑,另外参数pub_topic是yolov8识别到目标后发布出来的物体在镜头中的位置,程序作了修改,直接给出目标物的中心位置,其中参数image_topic是订阅的节点话题,一定要与摄像头发布的实际话题名称对应上。
<?xml version="1.0" encoding="utf-8"?>
<launch><!-- Load Parameter --><param name="use_cpu" value="false" /><!-- Start yolov8 and ros wrapper --><node pkg="yolov8_ros" type="yolo_v8.py" name="yolov8_ros" output="screen" ><param name="weight_path" value="$(find yolov8_ros)/weights/yolov8n.pt"/><param name="image_topic" value="/camera/color/image_raw" /><param name="pub_topic" value="/object_position" /><param name="camera_frame" value="camera_color_frame"/><param name="visualize" value="false"/><param name="conf" value="0.3" /></node>
</launch>
出现如下界面表示yolov8启动成功

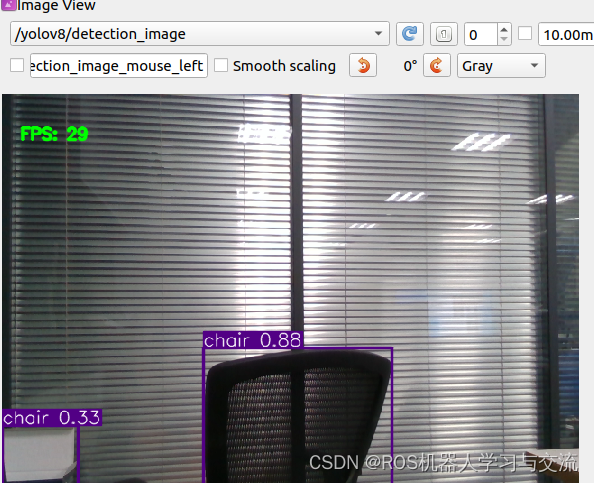
步骤三:打开rqt工具,查看识别效果
注:步骤三不是必须的,可以跳过直接进行步骤四
rqt_image_view

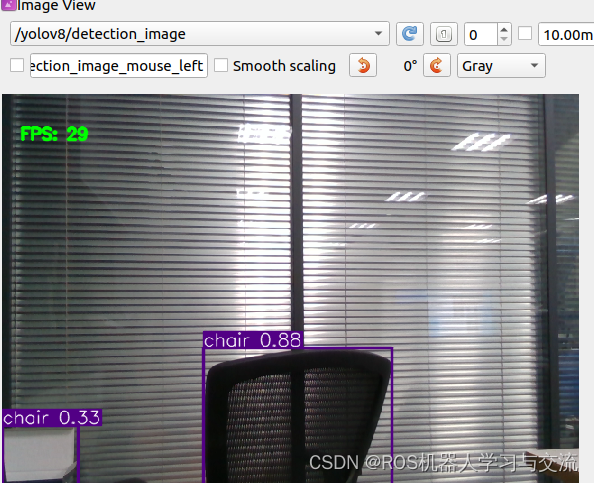
等待出现如下界面后,选择yolov8/detection_image查看yolov8识别效果
步骤四:启动跟随控制程序
(1)、终端启动程序
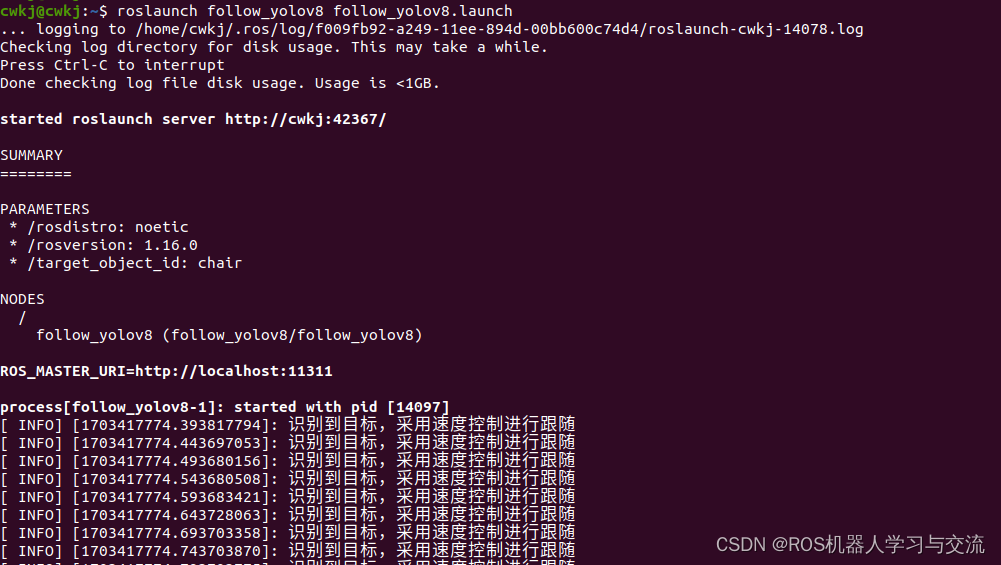
roslaunch follow_yolov8 follow_yolov8.launch
(2)、launch文件详解
<?xml version="1.0" encoding="utf-8"?>
<launch><param name="target_object_id" value="chair" /><node pkg="follow_yolov8" type="follow_yolov8" name="follow_yolov8" output="screen" />
</launch>
launch文件中加载的参数target_object_id是指定跟随的目标名称,无人机在识别到这个目标以后,会通过全向的速度控制保持目标始终在无人机的视野中。launch文件中指定参数chair,因此在识别chair以后,可以看到终端会打印日志已经识别到指定的目标物
步骤五:控制部分代码
此处抛砖引玉,仅仅做最简单的速度控制,读者可以根据自己的理解,添加类似PID等控制跟随的算法,本文不再展开
#include <ros/ros.h>
#include <std_msgs/Bool.h>
#include <geometry_msgs/PoseStamped.h>
#include <geometry_msgs/TwistStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
#include <mavros_msgs/PositionTarget.h>
#include <cmath>
#include <tf/transform_listener.h>
#include <nav_msgs/Odometry.h>
#include <mavros_msgs/CommandLong.h>
#include <yolov8_ros_msgs/BoundingBoxes.h>
#include <string>#define MAX_ERROR 50
#define VEL_SET 0.15
#define ALTITUDE 0.40using namespace std;yolov8_ros_msgs::BoundingBoxes object_pos;
nav_msgs::Odometry local_pos;
mavros_msgs::State current_state;
mavros_msgs::PositionTarget setpoint_raw;//检测到的物体坐标值
double position_detec_x = 0;
double position_detec_y = 0;
std::string Class = "no_object";std::string target_object_id = "eight";void state_cb(const mavros_msgs::State::ConstPtr& msg);void local_pos_cb(const nav_msgs::Odometry::ConstPtr& msg);void object_pos_cb(const yolov8_ros_msgs::BoundingBoxes::ConstPtr& msg);int main(int argc, char **argv)
{//防止中文输出乱码setlocale(LC_ALL, "");//初始化节点,名称为visual_throwros::init(argc, argv, "follow_yolov8");//创建句柄ros::NodeHandle nh;//订阅无人机状态话题ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>("mavros/state", 100, state_cb);//订阅无人机实时位置信息ros::Subscriber local_pos_sub = nh.subscribe<nav_msgs::Odometry>("/mavros/local_position/odom", 100, local_pos_cb);//订阅实时位置信息ros::Subscriber object_pos_sub = nh.subscribe<yolov8_ros_msgs::BoundingBoxes>("object_position", 100, object_pos_cb);//发布无人机位置控制话题ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>("mavros/setpoint_position/local", 100);//发布无人机多维控制话题ros::Publisher mavros_setpoint_pos_pub = nh.advertise<mavros_msgs::PositionTarget>("/mavros/setpoint_raw/local", 100); //请求无人机解锁服务 ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>("mavros/cmd/arming");//请求无人机设置飞行模式,本代码请求进入offboardros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>("mavros/set_mode");//请求控制舵机客户端ros::ServiceClient ctrl_pwm_client = nh.serviceClient<mavros_msgs::CommandLong>("mavros/cmd/command");//循环频率ros::Rate rate(20.0); ros::param::get("target_object_id", target_object_id);//等待连接到PX4无人机while(ros::ok() && current_state.connected){ros::spinOnce();rate.sleep();}setpoint_raw.type_mask = 1 + 2 + /*4 + 8 + 16 + 32*/ + 64 + 128 + 256 + 512 + 1024 + 2048;setpoint_raw.coordinate_frame = 8;setpoint_raw.position.x = 0;setpoint_raw.position.y = 0;setpoint_raw.position.z = 0 + ALTITUDE;mavros_setpoint_pos_pub.publish(setpoint_raw);for(int i = 100; ros::ok() && i > 0; --i){mavros_setpoint_pos_pub.publish(setpoint_raw);ros::spinOnce();rate.sleep();}//请求offboard模式变量mavros_msgs::SetMode offb_set_mode;offb_set_mode.request.custom_mode = "OFFBOARD";//请求解锁变量mavros_msgs::CommandBool arm_cmd;arm_cmd.request.value = true;ros::Time last_request = ros::Time::now();//请求进入offboard模式并且解锁无人机,15秒后退出,防止重复请求 while(ros::ok()){//请求进入OFFBOARD模式if( current_state.mode != "OFFBOARD" && (ros::Time::now() - last_request > ros::Duration(5.0))){if( set_mode_client.call(offb_set_mode) && offb_set_mode.response.mode_sent){ROS_INFO("Offboard enabled");}last_request = ros::Time::now();}else {//请求解锁if( !current_state.armed && (ros::Time::now() - last_request > ros::Duration(5.0))){if( arming_client.call(arm_cmd) && arm_cmd.response.success){ROS_INFO("Vehicle armed");}last_request = ros::Time::now();}}if(ros::Time::now() - last_request > ros::Duration(5.0))break;mavros_setpoint_pos_pub.publish(setpoint_raw);ros::spinOnce();rate.sleep();} while(ros::ok()){ //此处表示识别到launch文件中指定的目标//if(object_pos.bounding_boxes[0].Class == "chair")if(Class == target_object_id){ROS_INFO("识别到目标,采用速度控制进行跟随");//摄像头向下安装,因此摄像头的Z对应无人机的X前后方向,Y对应Y左右方向//无人机左右移动速度控制if(position_detec_x-320 >= MAX_ERROR){setpoint_raw.velocity.y = -VEL_SET;} else if(position_detec_x-320 <= -MAX_ERROR){setpoint_raw.velocity.y = VEL_SET;} else{setpoint_raw.velocity.y = 0;}//无人机前后移动速度控制if(position_detec_y-240 >= MAX_ERROR){setpoint_raw.velocity.x = -VEL_SET;} else if(position_detec_y-240 <= -MAX_ERROR){setpoint_raw.velocity.x = VEL_SET;} else{setpoint_raw.velocity.x = 0;}}else{setpoint_raw.velocity.x = 0;setpoint_raw.velocity.y = 0;}setpoint_raw.type_mask = 1 + 2 +/* 4 + 8 + 16 + 32*/ + 64 + 128 + 256 + 512 /*+ 1024 + 2048*/;setpoint_raw.coordinate_frame = 8;setpoint_raw.velocity.x = 0;setpoint_raw.position.z = 0 + ALTITUDE;setpoint_raw.yaw = 0;mavros_setpoint_pos_pub.publish(setpoint_raw);ros::spinOnce();rate.sleep();}return 0;
}void state_cb(const mavros_msgs::State::ConstPtr& msg)
{current_state = *msg;
}void local_pos_cb(const nav_msgs::Odometry::ConstPtr& msg)
{local_pos = *msg;
}void object_pos_cb(const yolov8_ros_msgs::BoundingBoxes::ConstPtr& msg)
{object_pos = *msg;position_detec_x = object_pos.bounding_boxes[0].xmin;position_detec_y = object_pos.bounding_boxes[0].ymin;Class = object_pos.bounding_boxes[0].Class;
}从图中可以看出,在10W功率的情况下,大概在30帧的效果,识别准确度比较高
相关文章:
超维空间S2无人机使用说明书——51、基础版——使用yolov8进行目标跟踪
引言:为了提高yolo识别的质量,提高了yolo的版本,改用yolov8进行物体识别,同时系统兼容了低版本的yolo,包括基于C的yolov3和yolov4,以及yolov7。 简介,为了提高识别速度,系统采用了G…...

Transformer(seq2seq、self-attention)学习笔记
在self-attention 基础上记录一篇Transformer学习笔记 Transformer的网络结构EncoderDecoder 模型训练与评估 Transformer的网络结构 Transformer是一种seq2seq 模型。输入一个序列,经过encoder、decoder输出结果也是一个序列,输出序列的长度由模型决定…...

2023-12-29 服务器开发-centos部署ftp
摘要: 2023-12-29 服务器开发-centos-部署ftp 部署ftp vsftpd(very secure FTP daemon)是Linux下的一款小巧轻快、安全易用的FTP服务器软件。本教程介绍如何在Linux实例上安装并配置vsftpd。 前提条件 已创建ECS实例并为实例分配了公网IP地址。 背景…...
C卷 (JavaPythonNode.jsC语言C++))
螺旋数字阵(100%用例)C卷 (JavaPythonNode.jsC语言C++)
疫情期间,小明隔离在家,百无聊赖,在纸上写数字玩。他发明了一种写法: 给出数字个数n和行数m (0 < n <= 999,0 < m <= 999) ,从左上角的1开始,按照顺时针螺旋向内写方式,依次写出2,3...n,最终形成一个m行矩阵 小明对这个矩阵有些要求 1.每行数字的个数一样多…...
(二))
AUTOSAR从入门到精通-网络通信(UDPNm)(二)
目录 前言 原理 UdpNm工作原理 UdpNm与CanNM的区别联系 网络管理算法...
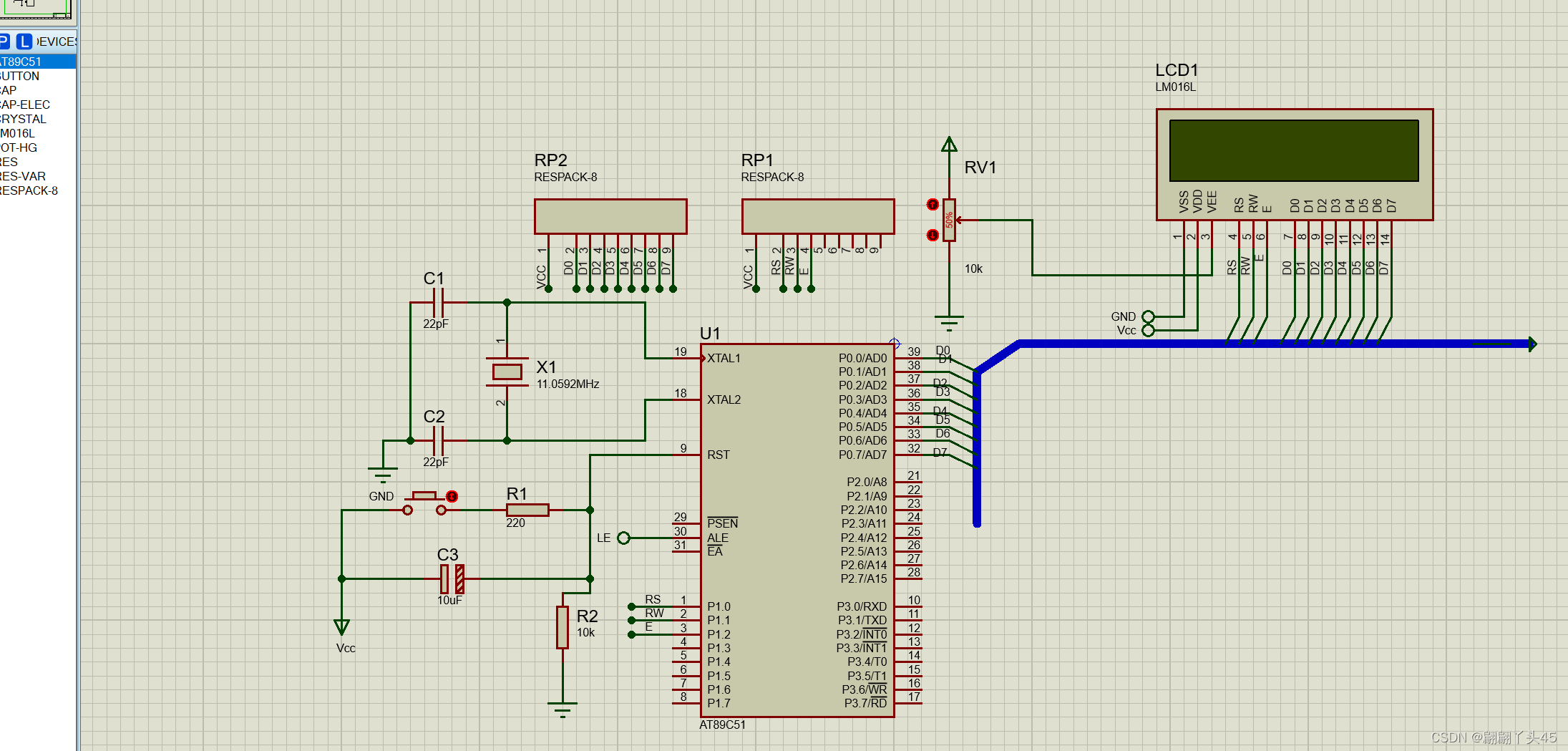
显示器与按键(LCD 1602 + button)
一、实验目的: (1)学习lcd 1602的编程与使用、 (2)机械式复位开关button软件消抖的方法。 二、实验内容: 1、必做:先显示开机画面,:在1602显示器上,分两行…...

2020年认证杯SPSSPRO杯数学建模B题(第一阶段)分布式无线广播全过程文档及程序
2020年认证杯SPSSPRO杯数学建模 B题 分布式无线广播 原题再现: 以广播的方式来进行无线网通信,必须解决发送互相冲突的问题。无线网的许多基础通信协议都使用了令牌的方法来解决这个问题,在同一个时间段内,只有唯一一个拿到令牌…...

【CISSP学习笔记】7. 安全评估与测试
该知识领域涉及如下考点,具体内容分布于如下各个子章节: 设计和验证评估、测试和审计策略进行安全控制测试收集安全过程数据(例如,技术和管理)分析测试输出并生成报告执行或协助安全审计 7.1. 构建安全评估和测试方案…...
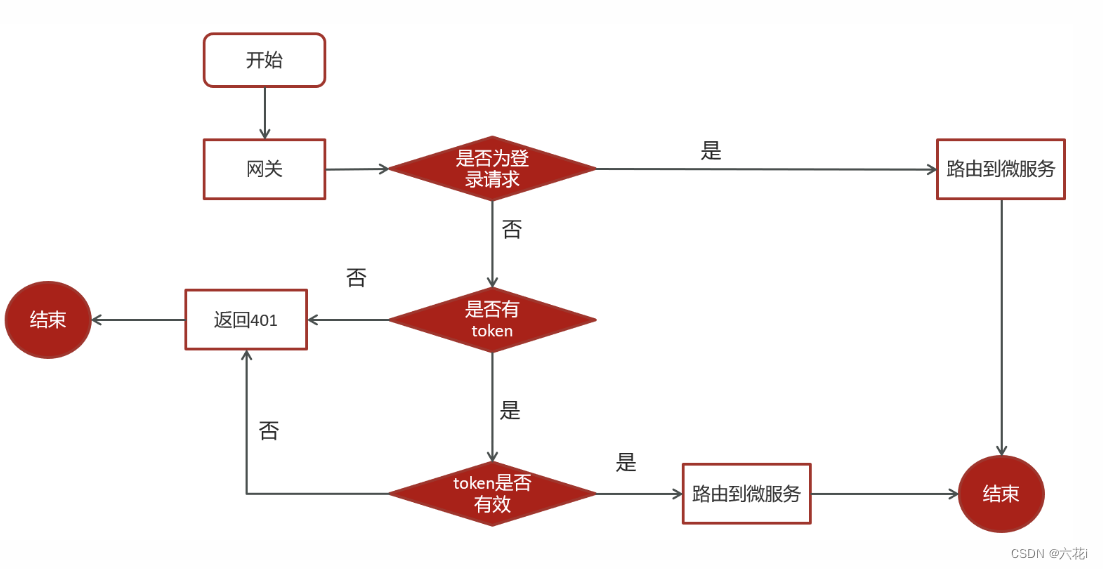
Gateway集成方法以及拦截器和过滤器的使用
前提:请先创建好一个SpringBoot项目 1. 引入依赖 SpringCloud 和 alibabaCloud 、 SpringBoot间对版本有强制要求,我使用的springboot是3.0.2的版本。版本对应关系请看:版本说明 alibaba/spring-cloud-alibaba Wiki GitHub <dependency…...
第G2周:人脸图像生成(DCGAN)
🍨 本文为[🔗365天深度学习训练营学习记录博客\n🍦 参考文章:365天深度学习训练营\n🍖 原作者:[K同学啊 | 接辅导、项目定制]\n🚀 文章来源:[K同学的学习圈子](https://www.yuque.co…...

【Web】Ctfshow Thinkphp5 非强制路由RCE漏洞
目录 非强制路由RCE漏洞 web579 web604 web605 web606 web607-610 前面审了一些tp3的sql注入,终于到tp5了,要说tp5那最经典的还得是rce 下面介绍非强制路由RCE漏洞 非强制路由RCE漏洞原理 非强制路由相当于开了一个大口子,可以任意调用当前框…...

python3遇到Can‘t connect to HTTPS URL because the SSL module is not available.
远程服务器centos7系统上有minicoda3,觉得太占空间,就把整个文件夹删了,原先的Python3也没了,都要重装。 我自己的步骤:进入管理员模式 1.下载Python3的源码: wget https://www.python.org/ftp/python/3.1…...

QSPI Flash xip取指同时program过程中概率性出现usb播歌时断音
项目场景: USB Audio芯片,代码放到qspi flash中,执行代码时,客户会偶尔保存一些参数,即FPGA验证过程中,每隔10ms向flash info区烧写4个byte(取指过程一直存在,且时隙软件不可控&…...

MySQL聚簇索引和非聚簇索引的区别
前言: 聚簇索引和非聚簇索引是数据库中的两种索引类型,他们在组织和存储数据时有不同的方式。 聚簇索引: 简单理解,就是将数据和索引放在了一起,找到了索引也就找到了数据。对于聚簇索引来说,他的非叶子节点上存储的是…...

【C#】蜗牛爬井问题C#控制台实现
文章目录 一、问题描述二、C#控制台代码 一、问题描述 井深30米,蜗牛在井底,每天爬3米又滑下1米,问第几天爬出来 二、C#控制台代码 using System; using System.Collections.Generic; using System.Linq; using System.Text; using System…...
IP地址的四大类型:动态IP、固定IP、实体IP、虚拟IP的区别与应用
在网络通信中,IP地址是设备在互联网上唯一标识的关键元素。动态IP、固定IP、实体IP和虚拟IP是四种不同类型的IP地址,它们各自具有独特的特点和应用场景。 1. 动态IP地址: 动态IP地址是由Internet Service Provider(ISPÿ…...

Linux Debian12安装和使用ImageMagick图像处理工具 常见图片png、jpg格式转webp格式
一、ImageMagick简介 ImageMagick是一套功能强大、稳定而且免费的工具集和开发包。可以用来读、写和图像格式转换,可以处理超过100种图像格式,包括流行的TIFF, JPEG, GIF, PNG, PDF以及PhotoCD等格式。对图片的操作,即可以通过命令行进行&am…...

JavaScript二
目录 流程控制 if判断 while循环 do while for循环 forEach for in Map与set iterator 流程控制 if判断 <script>use strictvar age 5;if(age < 3){alert("haha");}else if(age < 5){alert("hi world");}else{alert("hello wor…...

JavaScript系列——正则表达式
文章目录 需求场景正则表达式的定义创建正则表达式通过 / 表示式/ 创建通过构造函数创建 编写一个正则表达式的模式使用简单模式使用特殊字符常用特殊字符列表特殊字符组和范围 正则表达式使用代码演示 常用示例验证手机号码合法性 小结 需求场景 在前端开发领域,在…...

命令行创建Vue项目
Vue项目创建 1. 打开UI界面 在命令行中,执行如下指令: vue ui 2. 打开项目管理器 3. 创建项目 创建项目的过程,需要联网进行,这可能会耗时比较长的时间,请耐心等待。 windows的命令行,容易卡顿,…...
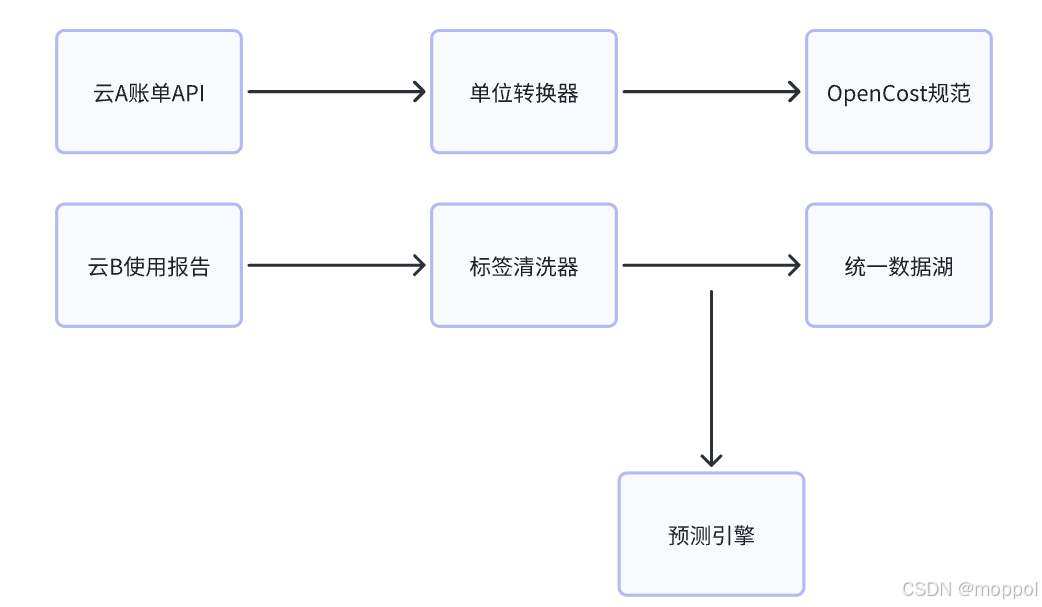
多云管理“拦路虎”:深入解析网络互联、身份同步与成本可视化的技术复杂度
一、引言:多云环境的技术复杂性本质 企业采用多云策略已从技术选型升维至生存刚需。当业务系统分散部署在多个云平台时,基础设施的技术债呈现指数级积累。网络连接、身份认证、成本管理这三大核心挑战相互嵌套:跨云网络构建数据…...

DeepSeek 赋能智慧能源:微电网优化调度的智能革新路径
目录 一、智慧能源微电网优化调度概述1.1 智慧能源微电网概念1.2 优化调度的重要性1.3 目前面临的挑战 二、DeepSeek 技术探秘2.1 DeepSeek 技术原理2.2 DeepSeek 独特优势2.3 DeepSeek 在 AI 领域地位 三、DeepSeek 在微电网优化调度中的应用剖析3.1 数据处理与分析3.2 预测与…...
)
Spring Boot 实现流式响应(兼容 2.7.x)
在实际开发中,我们可能会遇到一些流式数据处理的场景,比如接收来自上游接口的 Server-Sent Events(SSE) 或 流式 JSON 内容,并将其原样中转给前端页面或客户端。这种情况下,传统的 RestTemplate 缓存机制会…...

【Java学习笔记】Arrays类
Arrays 类 1. 导入包:import java.util.Arrays 2. 常用方法一览表 方法描述Arrays.toString()返回数组的字符串形式Arrays.sort()排序(自然排序和定制排序)Arrays.binarySearch()通过二分搜索法进行查找(前提:数组是…...
微信小程序 - 手机震动
一、界面 <button type"primary" bindtap"shortVibrate">短震动</button> <button type"primary" bindtap"longVibrate">长震动</button> 二、js逻辑代码 注:文档 https://developers.weixin.qq…...

江苏艾立泰跨国资源接力:废料变黄金的绿色供应链革命
在华东塑料包装行业面临限塑令深度调整的背景下,江苏艾立泰以一场跨国资源接力的创新实践,重新定义了绿色供应链的边界。 跨国回收网络:废料变黄金的全球棋局 艾立泰在欧洲、东南亚建立再生塑料回收点,将海外废弃包装箱通过标准…...
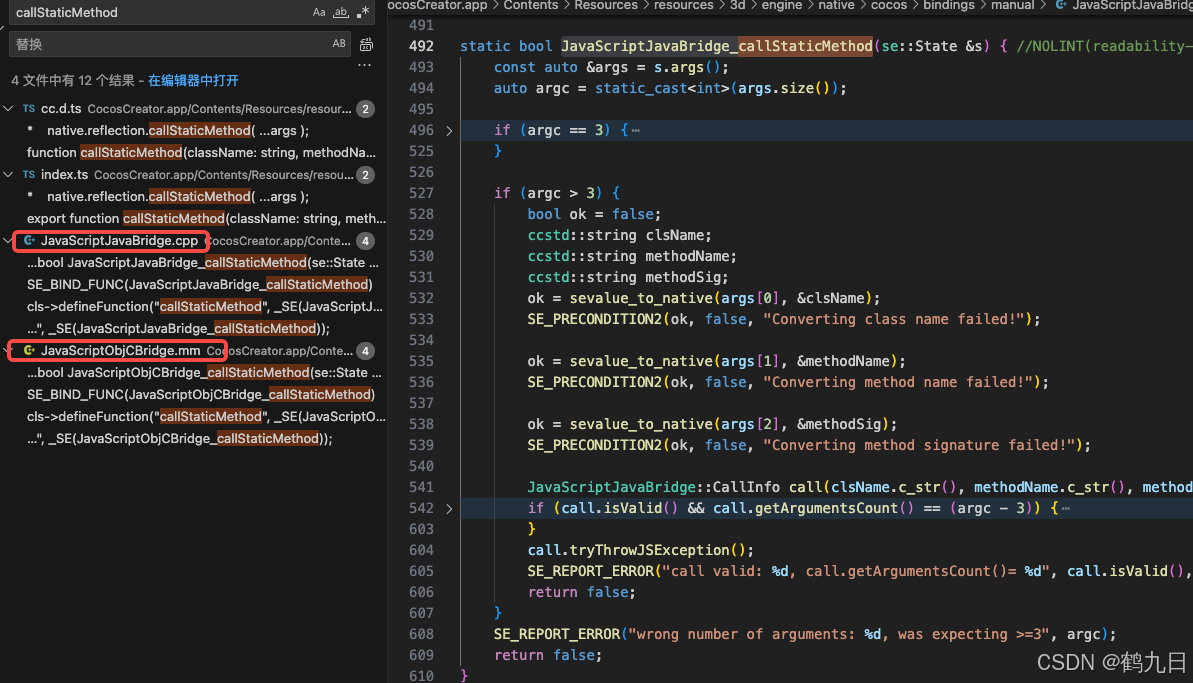
CocosCreator 之 JavaScript/TypeScript和Java的相互交互
引擎版本: 3.8.1 语言: JavaScript/TypeScript、C、Java 环境:Window 参考:Java原生反射机制 您好,我是鹤九日! 回顾 在上篇文章中:CocosCreator Android项目接入UnityAds 广告SDK。 我们简单讲…...

反射获取方法和属性
Java反射获取方法 在Java中,反射(Reflection)是一种强大的机制,允许程序在运行时访问和操作类的内部属性和方法。通过反射,可以动态地创建对象、调用方法、改变属性值,这在很多Java框架中如Spring和Hiberna…...

三体问题详解
从物理学角度,三体问题之所以不稳定,是因为三个天体在万有引力作用下相互作用,形成一个非线性耦合系统。我们可以从牛顿经典力学出发,列出具体的运动方程,并说明为何这个系统本质上是混沌的,无法得到一般解…...
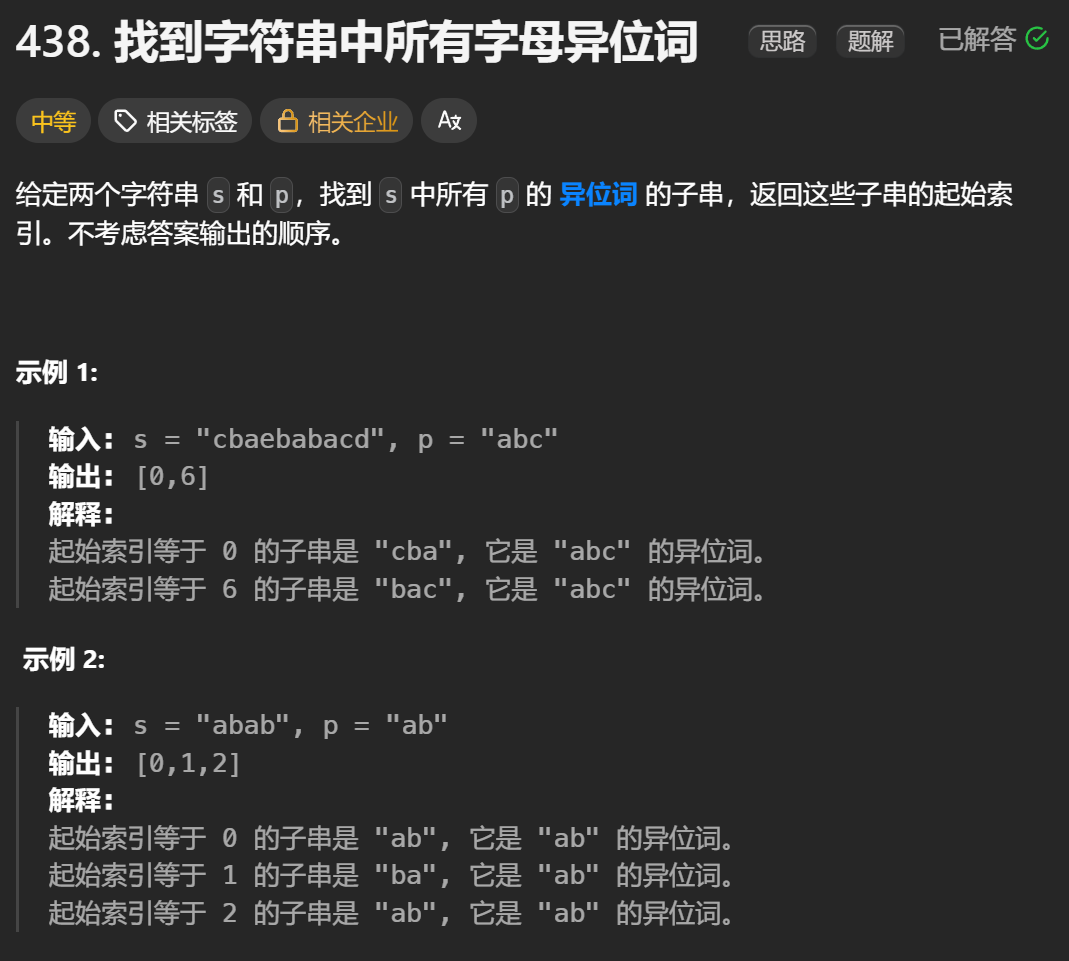
12.找到字符串中所有字母异位词
🧠 题目解析 题目描述: 给定两个字符串 s 和 p,找出 s 中所有 p 的字母异位词的起始索引。 返回的答案以数组形式表示。 字母异位词定义: 若两个字符串包含的字符种类和出现次数完全相同,顺序无所谓,则互为…...