ros2创建一个工程
第一步:创建src目录
$ mkdir ros2-demo
$ cd ros2-demo/
$ mkdir src
$ cd src/第二步:创建功能包
cd src$
ros2 pkg create --build-type ament_cmake ros2_demo --dependencies rclcpp std_msgsros2 pkg create --build-type ament_python learning_pkg_python # Pythonros2命令中:
pkg:表示功能包相关的功能;
create:表示创建功能包;
build-type:表示新创建的功能包是C++还是Python的,如果使用C++或者C,那这里就跟ament_cmake,如果使用Python,就跟ament_python
package_name:新建功能包的名字。比如在终端中分别创建C++和Python版本的功能包:
第三步:确定功能包
c++/c功能包
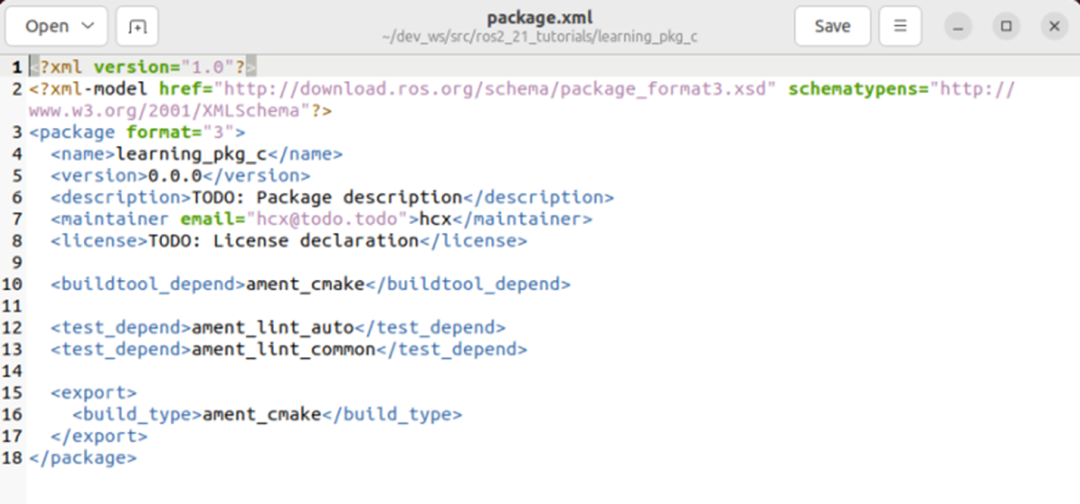
首先看下C++类型的功能包,其中必然存在两个文件:package.xml和CMakerLists.txt。

package.xml文件的主要内容如下,包含功能包的版权描述,和各种依赖的声明。
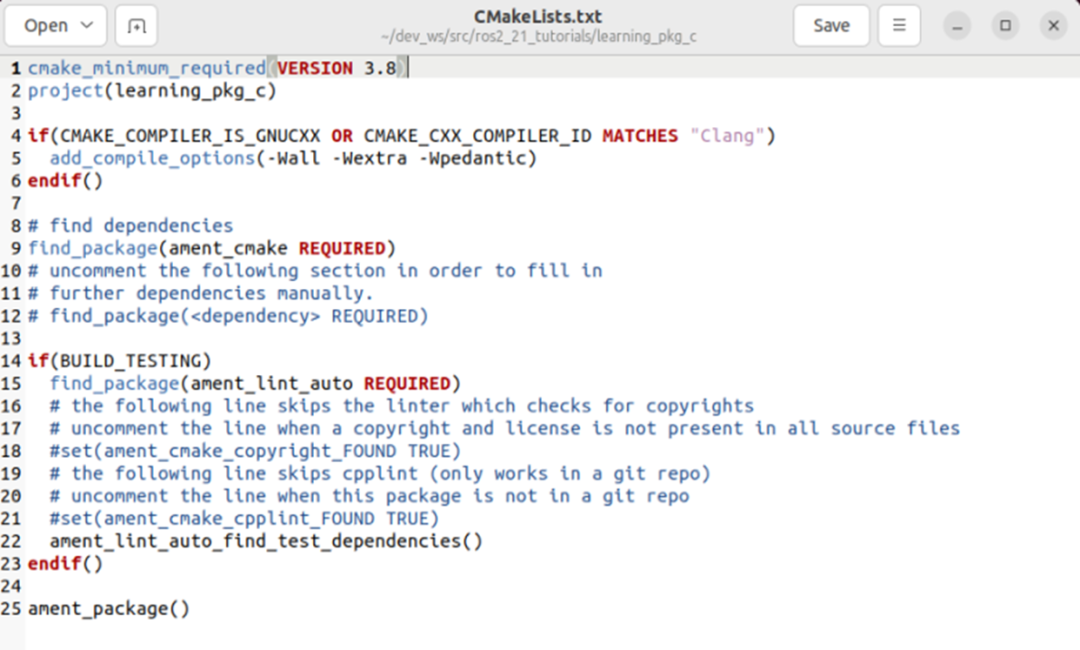
CMakeLists.txt文件是编译规则,C++代码需要编译才能运行,所以必须要在该文件中设置如何编译,使用CMake语法。
2.python功能包
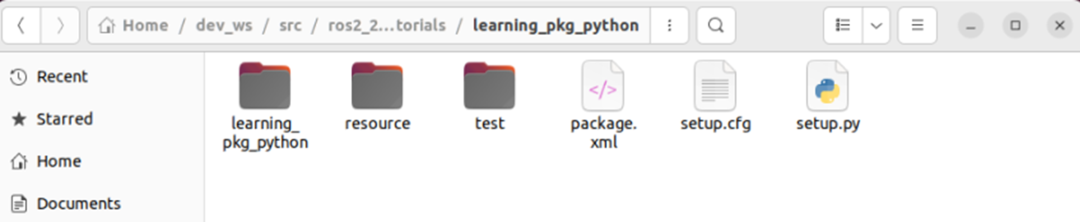
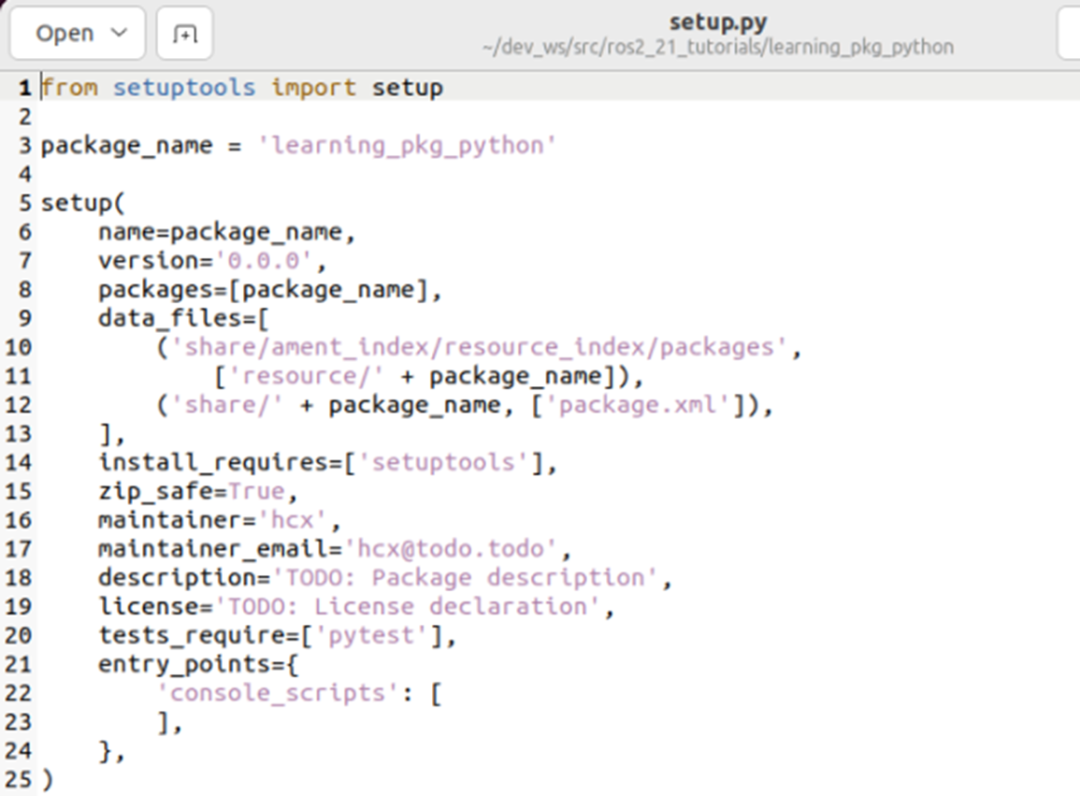
C++功能包需要将源码编译成可执行文件,但是Python语言是解析型的,不需要编译,所以会有一些不同,但也会有这两个文件:package.xml和setup.py。
package.xml文件的主要内容和C++版本功能包一样,包含功能包的版权描述,和各种依赖的声明。
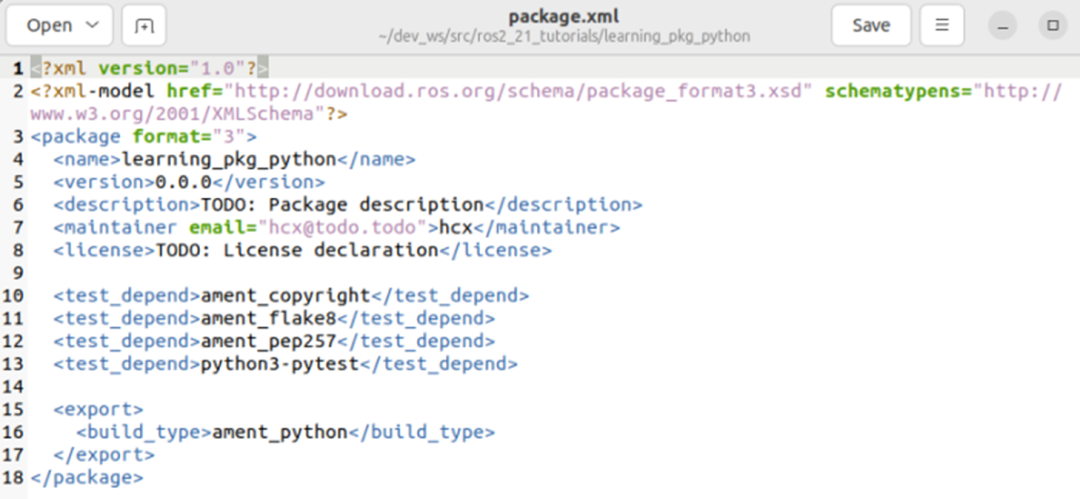
setup.py文件里边也包含一些版权信息,除此之外,还有“entry_points”配置的程序入口。
第四步:创建节点文件
cd ~/ros2-demo/src/ros2_demo
sudo gedit sub_node.cppsub_node.cpp代码具体如下:
#include <chrono>
#include "rclcpp/rclcpp.hpp"
using namespace std::chrono_literals;
/* This example creates a subclass of Node and uses a fancy C++11 lambda* function to shorten the timer syntax, at the expense of making the* code somewhat more difficult to understand at first glance if you are* unaccustomed to C++11 lambda expressions. */
class MinimalTimer : public rclcpp::Node
{
public:MinimalTimer(): Node("minimal_timer"){auto timer_callback = [this]() -> void { RCLCPP_INFO(this->get_logger(), "Hello, world!") };timer_ = create_wall_timer(500ms, timer_callback);}
private:rclcpp::TimerBase::SharedPtr timer_;
};
int main(int argc, char * argv[])
{rclcpp::init(argc, argv);rclcpp::spin(std::make_shared<MinimalTimer>());rclcpp::shutdown();return 0;
}第五步:修改CMakeLists.txt和package.xml
修改CMakeLists.txt;
cd ~/ros2-demo/src/ros2_demo
sudo gedit CMakeLists.txt在 find_package(ament_cmake REQUIRED)下面添加
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)添加可执行文件的名字为ros2_demo
add_executable(ros2_demo src/sub_node.cpp)
ament_target_dependencies(ros2_demo rclcpp std_msgs)添加 install(TARGETS…) 把可执行文件安装到install去
install(TARGETSros2_demoDESTINATION lib/${PROJECT_NAME})第六步:编译和运行
编译节点
cd ~/ros2-demo
colcon build --packages-select ros2_demo
source install/setup.bash运行节点
ros2 run ros2_demo sub_node相关文章:
ros2创建一个工程
第一步:创建src目录 $ mkdir ros2-demo $ cd ros2-demo/ $ mkdir src $ cd src/第二步:创建功能包cd src$ ros2 pkg create --build-type ament_cmake ros2_demo --dependencies rclcpp std_msgsros2 pkg create --build-type ament_python learning_pkg…...

【力扣】stack容器的探索之有效的括号
作者:狮子也疯狂 专栏:《算法详解》 愿你生如夏花之绚烂,幸运永远与你相伴,疯狂常在。 目录一. 🦁 Stack容器的来历1.1 操作栈的方法二. 🦁 Stack的使用2.1 题目2.2 分析2.3 详细算法实现2.4 力扣AC截图三…...

【Elsevier出版社】中科院2区,SCIEEI 双检,已有发表案例,3个月左右录用
1区智能传感器类SCIE&EI 【期刊简介】IF:5.0-6.0,JCR1区,中科院2区,SCI&EI 双检,正刊 【参考周期】3个月左右录用 【截稿日期】2023.5.30 【征稿领域】有关人工智能与传感器的相关研究均可 包括但不限于&#…...

基于明道云平台重建医院管理流程
一、龙华区医疗信息化建设情况 首先,给大家介绍一下龙华区医疗信息化建设的情况,龙华区位于深圳市的中部,目前下属3家公立医院,2家公共卫生机构。2017年,龙华区提出了建设智慧龙华总体框架方案,龙华区卫生…...
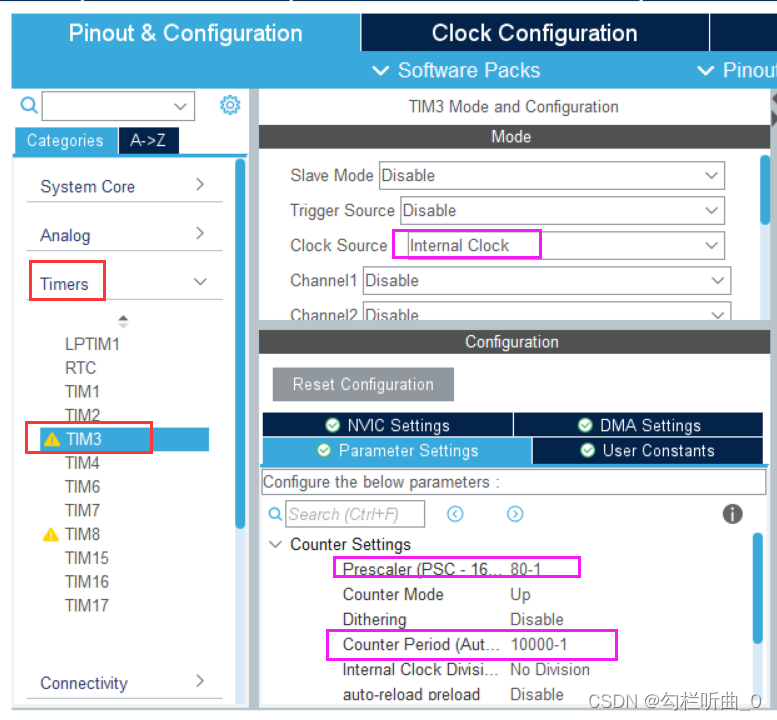
【蓝桥杯嵌入式】STM32定时器的配置,解析预分频系数和重装载值与时钟频率的关系
🎊【蓝桥杯嵌入式】专题正在持续更新中,原理图解析✨,各模块分析✨以及历年真题讲解✨都在这儿哦,欢迎大家前往订阅本专题,获取更多详细信息哦🎏🎏🎏 🪔本系列专栏 - 蓝…...
ChatGPT API 低价上线,开发者可以人手一个了?
千呼万唤,ChatGPT API来了! 不仅首发,价格居然还有惊喜,0.002美元/每1000 token,并将价格降低90%,直接打了1折。OpenAI官方还表示,gpt-3.5-turbo目前的版本代号是gpt-3.5-turbo-0301࿰…...

品牌营销策略 | 科学经营合作伙伴关系的5个要素
在管理众多的合作伙伴项目时,企业会遇到很多的问题,比如,数据信息分散凌乱、手动操作繁琐重复和处理环节粗放等。这将耗费公司大量的人力物力,严重影响大数据的综合分析和利用。因此,企业要科学管理好企业的合作伙伴关…...

【剑指offer-C++】JZ20:表示数值的字符串
【剑指offer-C】JZ20:表示数值的字符串题目描述解题思路题目描述 描述:请实现一个函数用来判断字符串str是否表示数值(包括科学计数法的数字,小数和整数)。 科学计数法的数字(按顺序)可以分成以下几个部分…...

【NLP相关】深度学习领域不同编程IDE对比
❤️觉得内容不错的话,欢迎点赞收藏加关注😊😊😊,后续会继续输入更多优质内容❤️👉有问题欢迎大家加关注私戳或者评论(包括但不限于NLP算法相关,linux学习相关,读研读博…...

定制ubuntu的docker镜像
ssh登录jdkmavenvimpingcurlFROM ubuntu:22.04RUN apt-get updateRUN apt-get install -y \vim \inetutils-ping \openssh-server \curl \openjdk-8-jdk \mavenRUN mkdir /var/run/sshdRUN echo root:root |chpasswdRUN sed -ri s/^#?PermitRootLogin\s.*/PermitRootLogin yes…...
我的 System Verilog 学习记录(8)
引言 本文简单介绍 SystemVerilog 的接口。 前文链接: 我的 System Verilog 学习记录(1) 我的 System Verilog 学习记录(2) 我的 System Verilog 学习记录(3) 我的 System Verilog 学习记…...
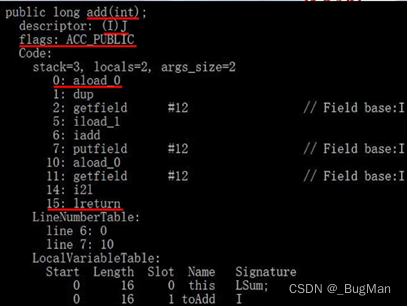
详解JAVA字节码
目录 1.概述 2.字节码文件构成 2.1.魔数 2.2.版本号 2.3.常量池 2.4.访问标志 2.5.索引 2.6.字段表 2.7.方法表 3.字节码指令 3.1.概述 3.2.指令分类 3.2.1.加载存储指令 3.2.2.运算指令 3.2.3.其他指令 3.3.完整指令工作流程 4.字节码保护 1.概述 以往的编程…...
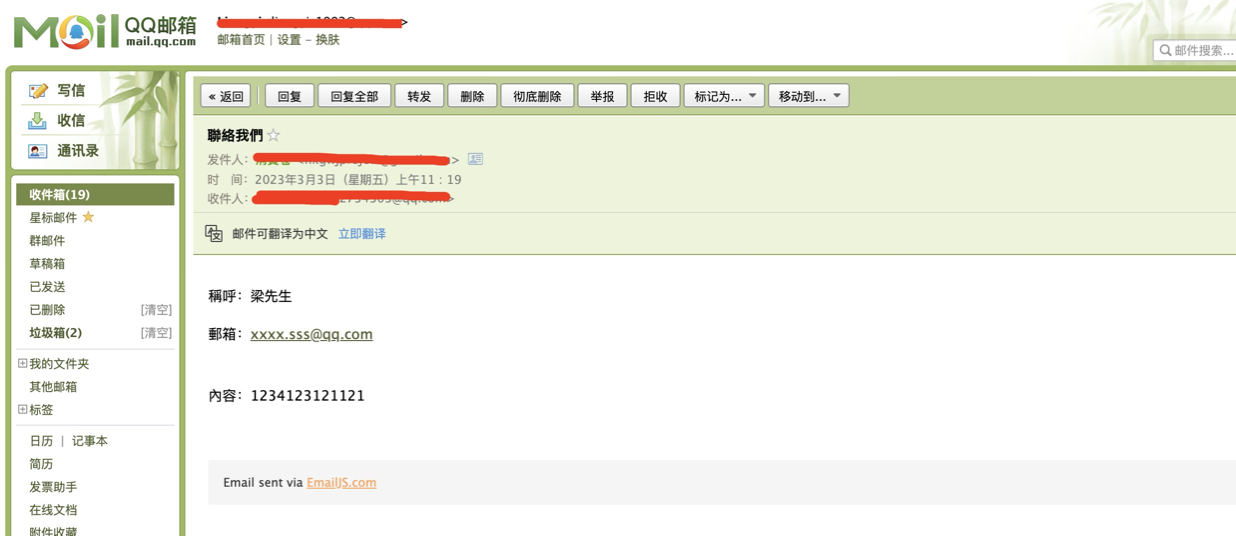
前端利用emailjs发送邮件
最近有一个需求,前端发送一个form表单到一个邮箱,找了一圈发现emailjs还不错就使用他了。首先emailjs官网注册一个账号注册完之后创建一个邮件服务(我这里使用的是谷歌邮箱)链接谷歌邮箱账户 然后创建服务接下来就要创建一个邮件的…...

16 Nacos服务端服务注册源码分析
Nacos服务端服务注册源码分析 服务端调用接口 我们已经知道客户端在注册服务的时候实际上是调用的NamingService.registerInstance这个方法来完成实例的注册,而且在最后我们也告诉了大家实际上从本质上讲服务注册就是调用的对应接口nacos/v1/ns/instanceÿ…...

Spring Boot2中如何优雅地个性化定制Jackson
概述 本文的编写初衷,是想了解一下Spring Boot2中,具体是怎么序列化和反序列化JSR 310日期时间体系的,Spring MVC应用场景有如下两个: 使用RequestBody来获取JSON参数并封装成实体对象;使用ResponseBody来把返回给前…...

2023年全国最新食品安全管理员精选真题及答案11
百分百题库提供食品安全管理员考试试题、食品安全员考试预测题、食品安全管理员考试真题、食品安全员证考试题库等,提供在线做题刷题,在线模拟考试,助你考试轻松过关。 101.婴幼儿配方乳粉的产品配方应当经()部门注册。…...
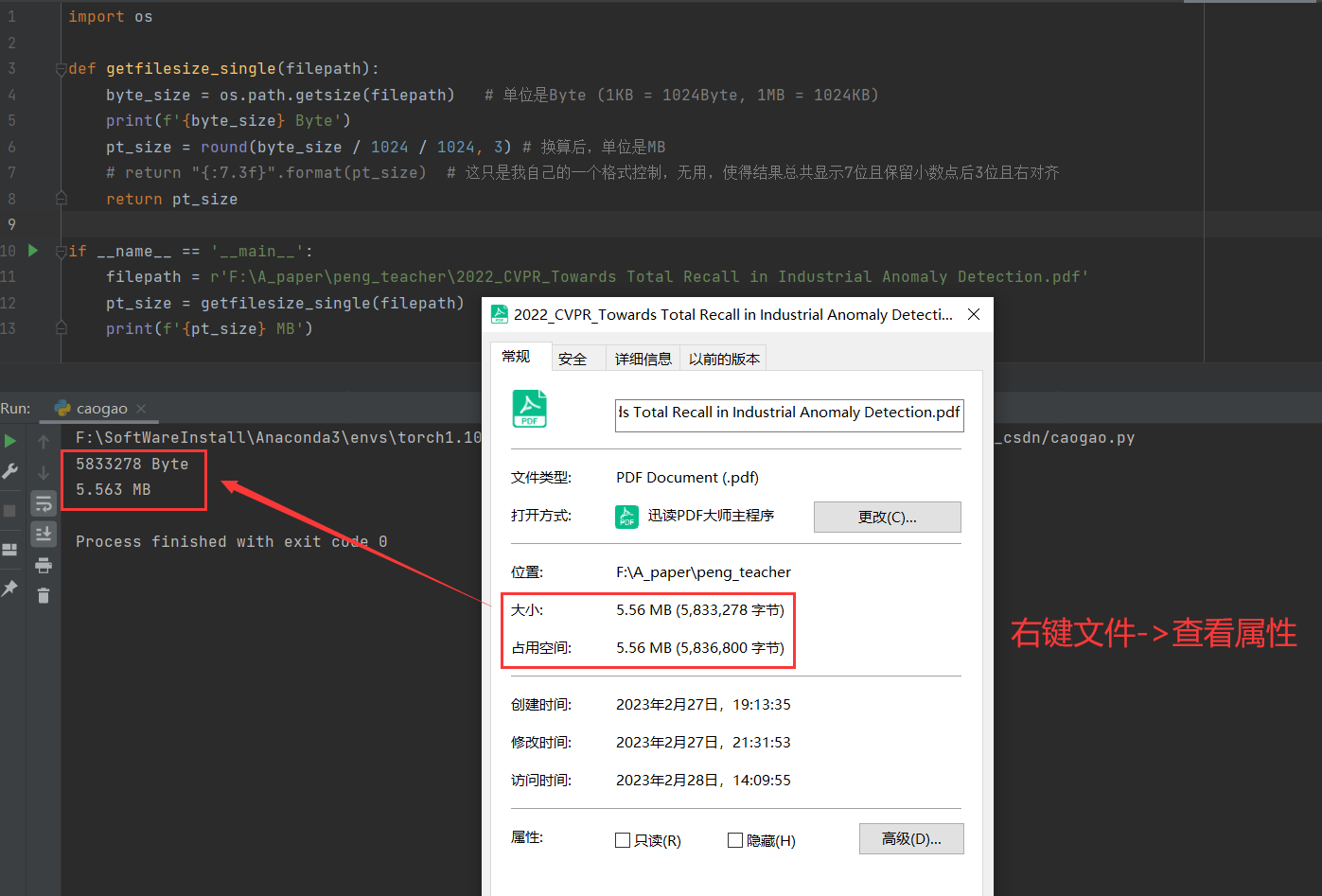
【脚本】用于得到某个文件/文件夹所有文件的存储大小(MB单位)
知识点 来自在线转换换算网页:在线文件大小(bit,bytes,KB,MB,GB,TB)转换换算 电脑中存储常用的单位: 1Byte(Byte 字节) 8Bit 1KB (Kilobyte 千字节) 1024Byte 1MB (Megabyte,兆字节,简称“兆”) 1024KB 1GB (Gigabyte&am…...
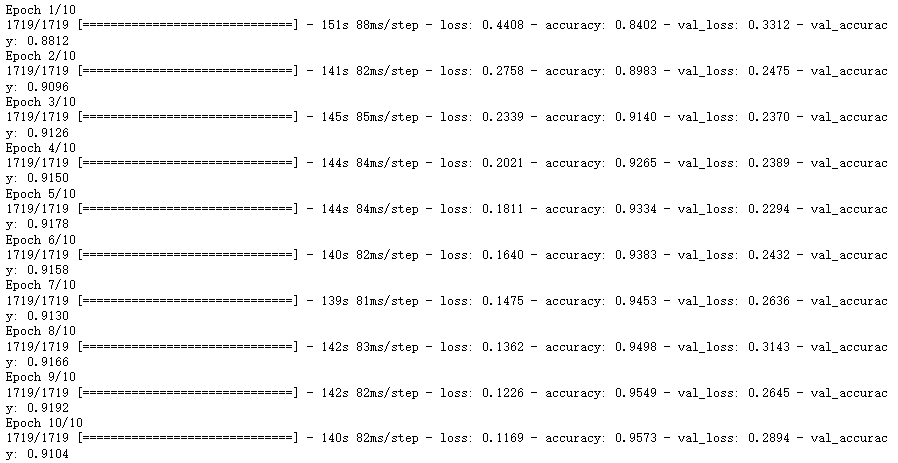
19- CNN进行Fashion-MNIST分类 (tensorflow系列) (项目十九)
项目要点 Fashion-MNIST总共有十个类别的图像。代码运行位置 CPU: cputf.config.set_visible_devices(tf.config.list_physical_devices("CPU"))fashion_mnist keras.datasets.fashion_mnist # fashion_mnist 数据导入训练数据和测试数据拆分: x_valid, x_train…...
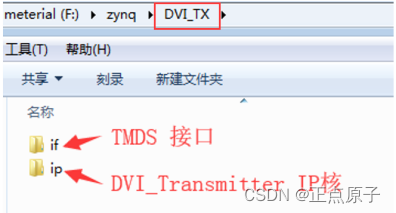
【正点原子FPGA连载】第二十二章IP封装与接口定义实验 摘自【正点原子】DFZU2EG_4EV MPSoC之嵌入式Vitis开发指南
1)实验平台:正点原子MPSoC开发板 2)平台购买地址:https://detail.tmall.com/item.htm?id692450874670 3)全套实验源码手册视频下载地址: http://www.openedv.com/thread-340252-1-1.html 第二十二章IP封装…...

【ElasticSearch8.X】学习笔记(二)
【ElasticSearch8.X】学习笔记四、基础操作4.1、索引操作4.1.1、创建索引4.1.2、查询指定索引4.1.3、查询所有索引4.1.4、 删除索引4.2、文档操作4.2.1、创建文档4.2.2、查询文档4.2.3、修改文档4.2.4、删除文档4.2.5、查询所有文档4.3、数据搜索4.3.1、匹配查询文档4.3.2、匹配…...
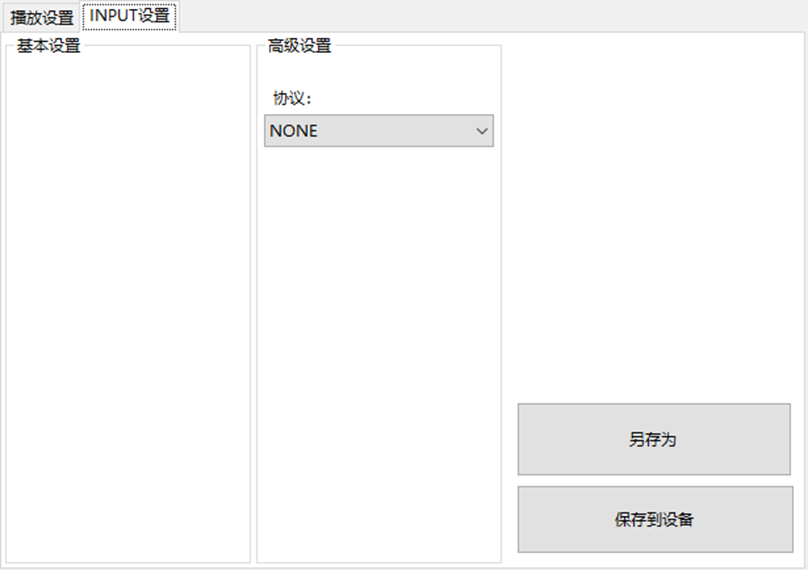
LBE-LEX系列工业语音播放器|预警播报器|喇叭蜂鸣器的上位机配置操作说明
LBE-LEX系列工业语音播放器|预警播报器|喇叭蜂鸣器专为工业环境精心打造,完美适配AGV和无人叉车。同时,集成以太网与语音合成技术,为各类高级系统(如MES、调度系统、库位管理、立库等)提供高效便捷的语音交互体验。 L…...
linux之kylin系统nginx的安装
一、nginx的作用 1.可做高性能的web服务器 直接处理静态资源(HTML/CSS/图片等),响应速度远超传统服务器类似apache支持高并发连接 2.反向代理服务器 隐藏后端服务器IP地址,提高安全性 3.负载均衡服务器 支持多种策略分发流量…...

java_网络服务相关_gateway_nacos_feign区别联系
1. spring-cloud-starter-gateway 作用:作为微服务架构的网关,统一入口,处理所有外部请求。 核心能力: 路由转发(基于路径、服务名等)过滤器(鉴权、限流、日志、Header 处理)支持负…...
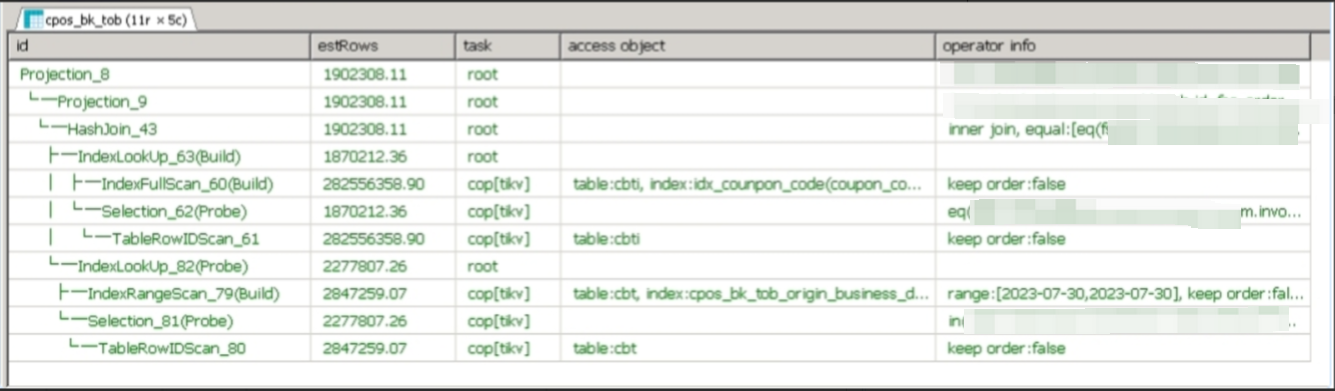
【入坑系列】TiDB 强制索引在不同库下不生效问题
文章目录 背景SQL 优化情况线上SQL运行情况分析怀疑1:执行计划绑定问题?尝试:SHOW WARNINGS 查看警告探索 TiDB 的 USE_INDEX 写法Hint 不生效问题排查解决参考背景 项目中使用 TiDB 数据库,并对 SQL 进行优化了,添加了强制索引。 UAT 环境已经生效,但 PROD 环境强制索…...

大型活动交通拥堵治理的视觉算法应用
大型活动下智慧交通的视觉分析应用 一、背景与挑战 大型活动(如演唱会、马拉松赛事、高考中考等)期间,城市交通面临瞬时人流车流激增、传统摄像头模糊、交通拥堵识别滞后等问题。以演唱会为例,暖城商圈曾因观众集中离场导致周边…...
LeetCode - 394. 字符串解码
题目 394. 字符串解码 - 力扣(LeetCode) 思路 使用两个栈:一个存储重复次数,一个存储字符串 遍历输入字符串: 数字处理:遇到数字时,累积计算重复次数左括号处理:保存当前状态&a…...
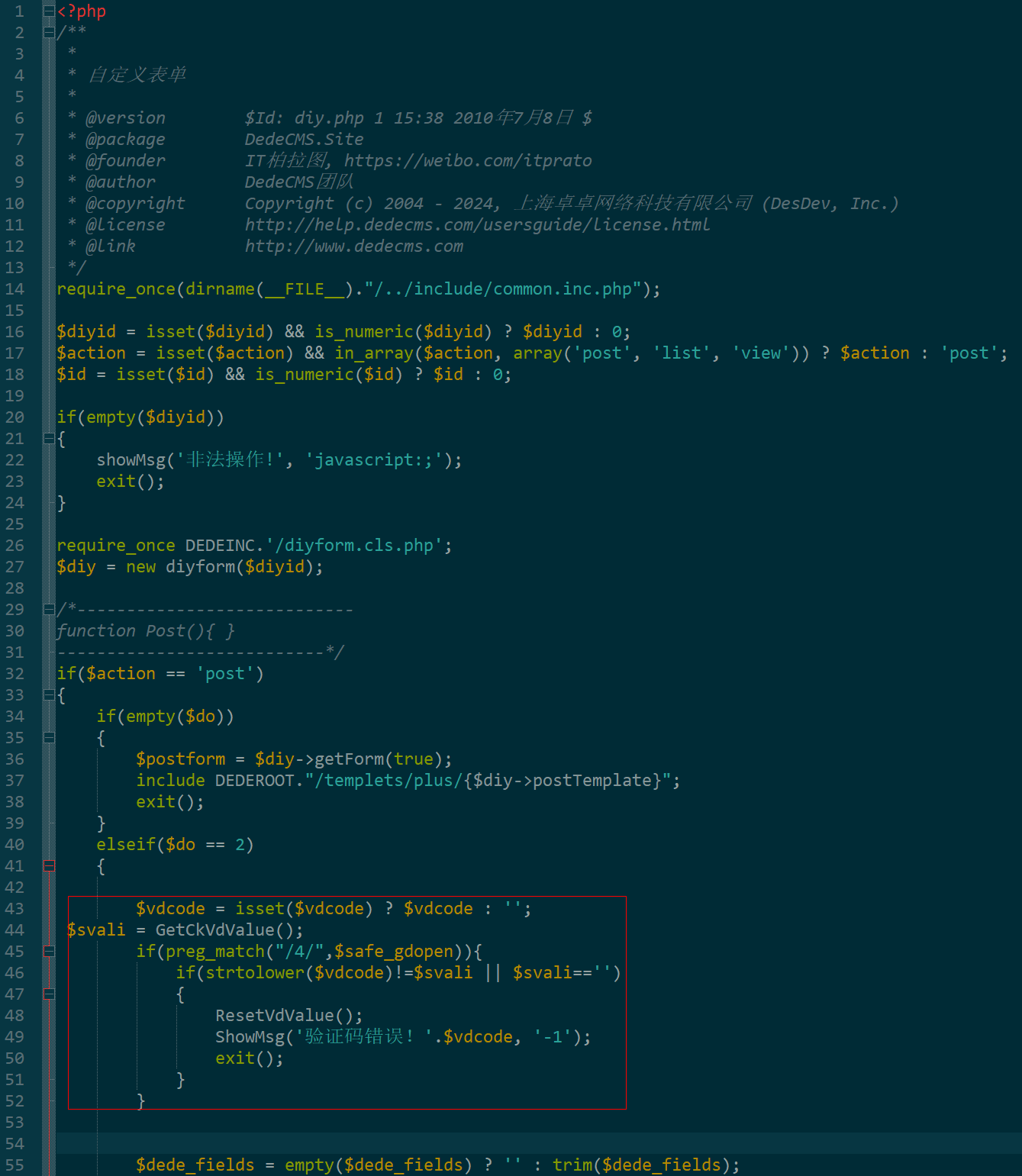
dedecms 织梦自定义表单留言增加ajax验证码功能
增加ajax功能模块,用户不点击提交按钮,只要输入框失去焦点,就会提前提示验证码是否正确。 一,模板上增加验证码 <input name"vdcode"id"vdcode" placeholder"请输入验证码" type"text&quo…...

【JavaSE】绘图与事件入门学习笔记
-Java绘图坐标体系 坐标体系-介绍 坐标原点位于左上角,以像素为单位。 在Java坐标系中,第一个是x坐标,表示当前位置为水平方向,距离坐标原点x个像素;第二个是y坐标,表示当前位置为垂直方向,距离坐标原点y个像素。 坐标体系-像素 …...

今日学习:Spring线程池|并发修改异常|链路丢失|登录续期|VIP过期策略|数值类缓存
文章目录 优雅版线程池ThreadPoolTaskExecutor和ThreadPoolTaskExecutor的装饰器并发修改异常并发修改异常简介实现机制设计原因及意义 使用线程池造成的链路丢失问题线程池导致的链路丢失问题发生原因 常见解决方法更好的解决方法设计精妙之处 登录续期登录续期常见实现方式特…...

Web 架构之 CDN 加速原理与落地实践
文章目录 一、思维导图二、正文内容(一)CDN 基础概念1. 定义2. 组成部分 (二)CDN 加速原理1. 请求路由2. 内容缓存3. 内容更新 (三)CDN 落地实践1. 选择 CDN 服务商2. 配置 CDN3. 集成到 Web 架构 …...