激光雷达行业梳理2-产业链、公司、未来展望
四、产业链及竞争格局

1、光学和电子元器件
2、激光雷达整机厂商

五、相关公司
1、整机厂商
(1)Velodyne

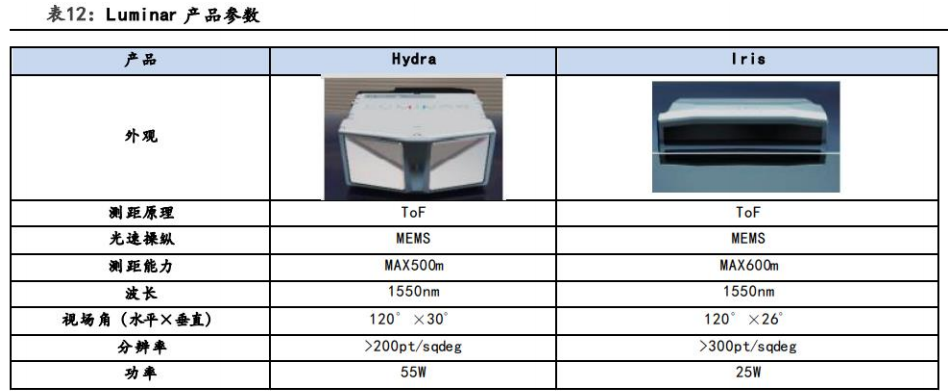
(2)Luminar
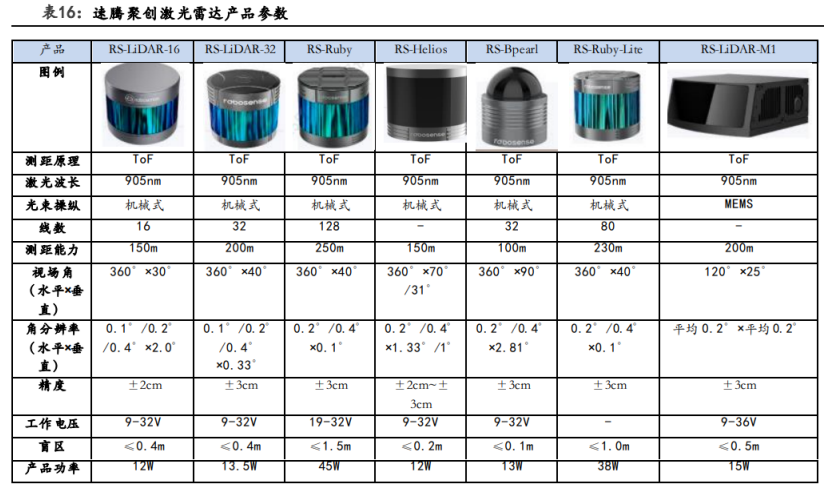
(3)速腾聚创

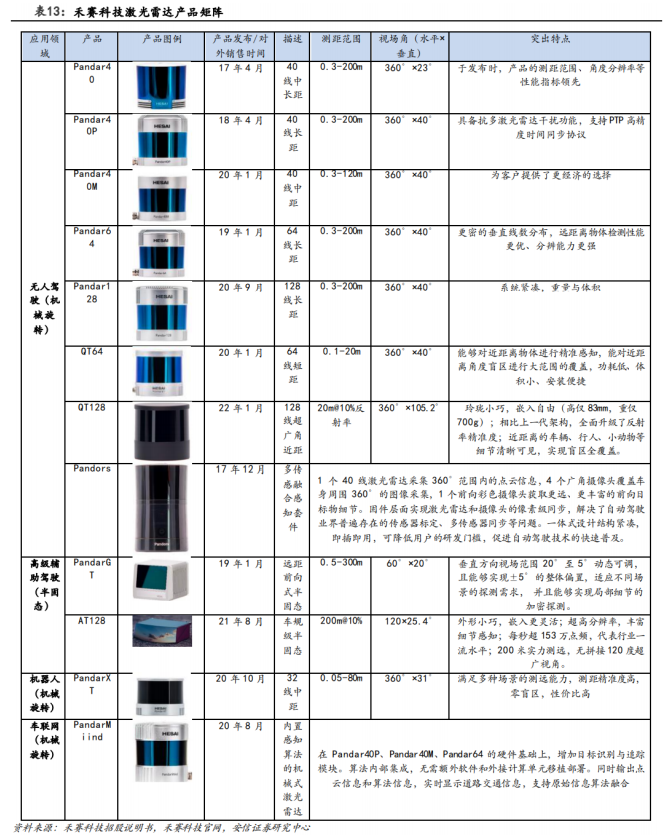
(4)禾赛科技
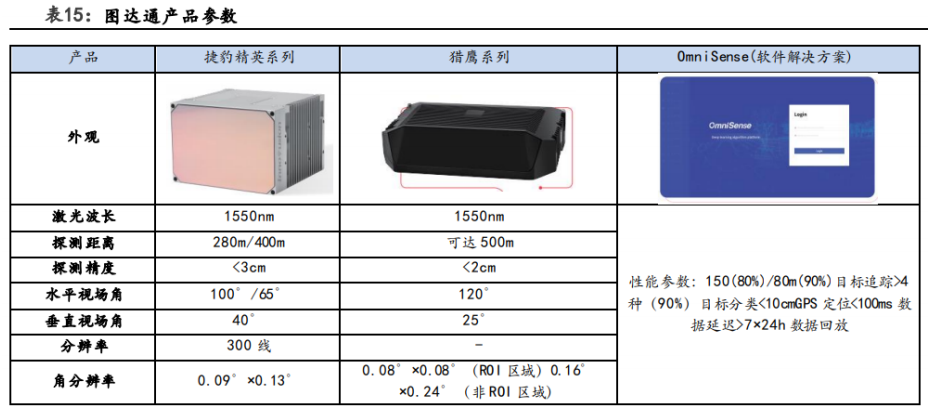
(5)图达通
2、激光雷达+上游零部件厂商
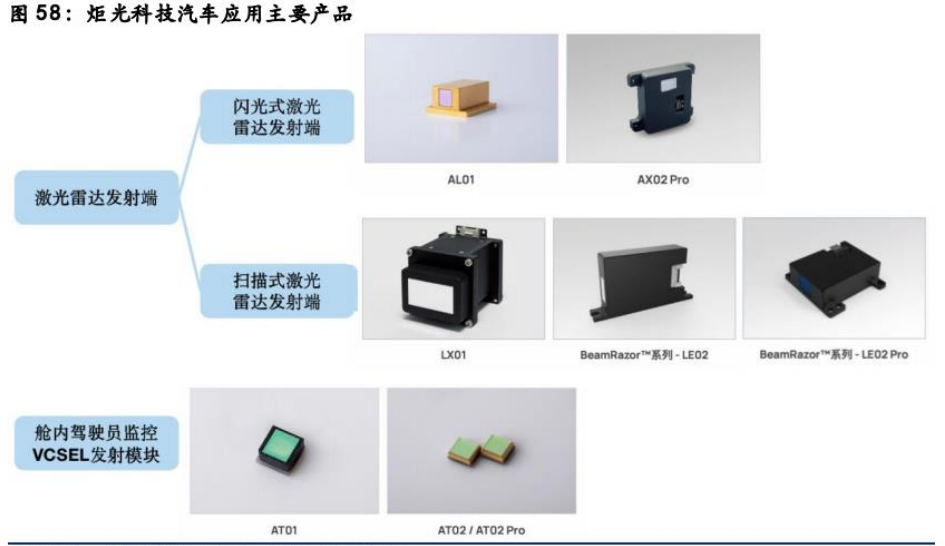
(1)炬光科技
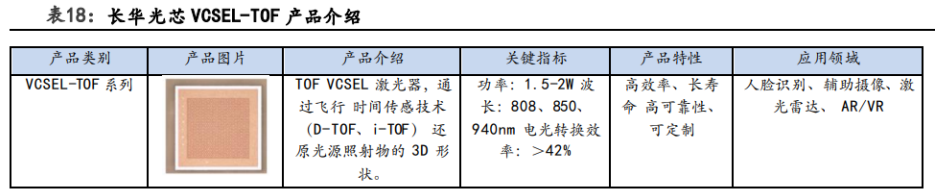
(2)长华光芯
(3)舜宇光学
(4)永新光学
(5)蓝特光学
(6)万集科技

六、未来展望
1、加速布局芯片化和算法垂直一体化研发,形成更高的技术壁垒
2、2023 年有望成为补盲激光雷达上车元年

相关文章:
激光雷达行业梳理2-产业链、公司、未来展望
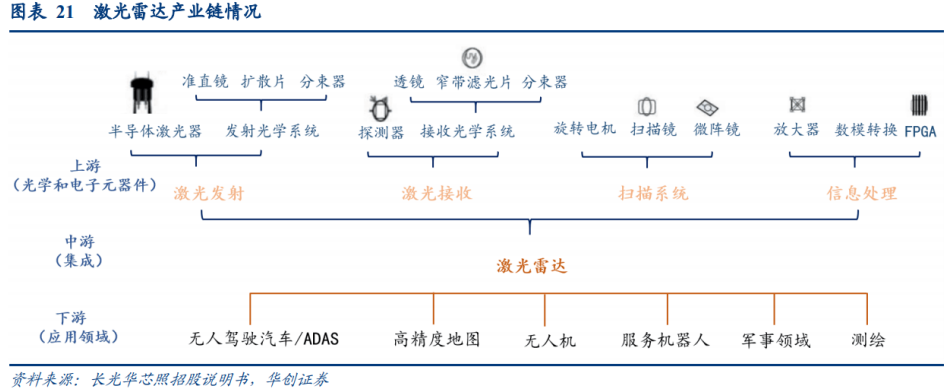
四、产业链及竞争格局 激光雷达产业链可以分为上游(光学和电子元器件)、中游(集成激光雷达)、下游(不同应用场景)。其中 上游即激光发射、激光接收、扫描系统和信息处理四大部分,主要包括激光器…...

Java 设计者模式以及与Spring关系(四) 代理模式
目录 简介: 23设计者模式以及重点模式 代理模式(Proxy Pattern) 静态代理示例 spring中应用 动态代理 1.基于JDK的动态代理 target.getClass().getInterfaces()作用 内名内部类写法(更简洁,但不推荐) 2.基于CGLIB实现 spring中应用 …...

PHP编程实践:实际商品价格数据采集
引言 在电子商务领域,对商品价格进行数据采集和对比是一项常见的需求。本文将介绍如何使用PHP编程语言实现对1688和淘宝商品价格数据的采集和对比,帮助读者了解实际的编程实践过程。 一、数据采集原理 数据采集是指从互联网上获取数据的过程ÿ…...

有效防范网络风险的关键措施
在数字化时代,企业面临着日益复杂和频繁的网络风险。提高员工的网络安全意识是防范网络威胁的关键一步。本文将探讨企业在提升网络安全意识方面可以采取的措施,以有效预防潜在的网络风险。 1. 开展网络安全培训:企业应定期组织网络安全培训&…...

Spring Boot整合webservice
Spring Boot整合webservice 前言1.整合依赖2.建立暴露接口2.实现类 3.发布服务4.查看打完收工! 前言 工作中遇到的问题,由于下游系统属于第三方系统,使用的是soap webservice,同时也在开发,虽然也发布了一套webservic…...
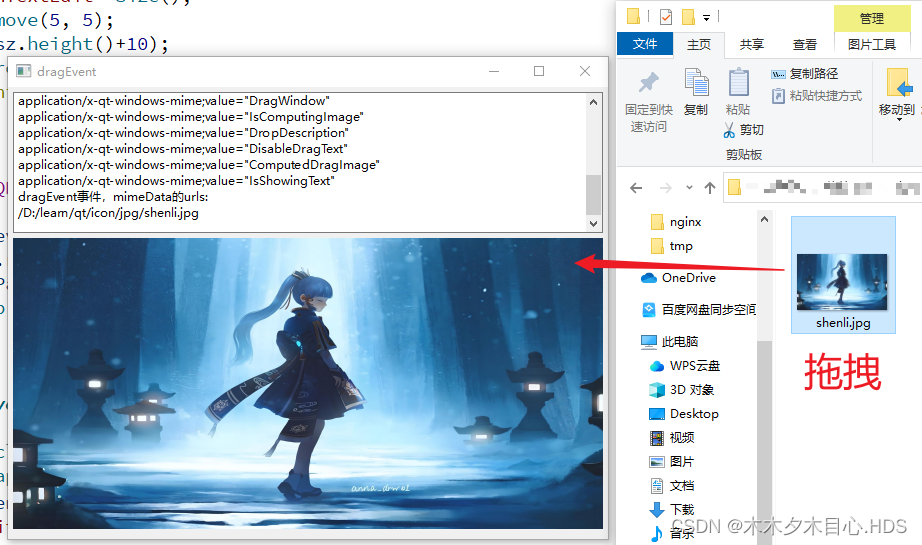
Qt拖拽事件简单实现
1.相关说明 重写resizeEvent(这个按需重写)、dragEnterEvent(拖拽事件函数)、dropEvent(放下事件函数),可以将本地图片拖拽到label标签中 2.相关界面 3.相关代码 #include "widget.h" #include "ui_widget.h" #include <QDragEnterEvent>…...

上门回收小程序,打造回收新模式
近年来,我国一直秉持着环保绿色的发展理念,为了减少资源浪费,旧物回收成为了人们处理废弃物品的方式。目前,我国回收市场规模大约能达到3.58亿元,在我国经济的稳定增长和环保意识的提高下,回收市场规模还将…...

unity项目《样板间展示》开发:火焰和UI设计
第二章:火焰和UI设计 前言一、火焰模型管理灶台火焰壁炉火焰 二、电视机播放三、UI设计结语 前言 这次带大家从0到1做一个unity项目:《样板间展示》。 顾名思义,项目内容是展示样板间,即玩家可以与房间中的物体、家具进行交互。 至…...

即插即用篇 | UniRepLKNet:用于音频、视频、点云、时间序列和图像识别的通用感知大卷积神经网络 | DRepConv
大卷积神经网络(ConvNets)近来受到了广泛研究关注,但存在两个未解决且需要进一步研究的关键问题。1)现有大卷积神经网络的架构主要遵循传统ConvNets或变压器的设计原则,而针对大卷积神经网络的架构设计仍未得到解决。2)随着变压器在多个领域的主导地位,有待研究ConvNets…...
MPU6050传感器—姿态检测
本节主要介绍以下内容: 姿态检测的基本概念 姿态传感器的工作原理及参数 MPU6050传感器介绍 实验:获取MPU6050原始数据 实验:移植官方DMP例程 一、姿态检测基本概念 1.1 姿态 在飞行器中,飞机姿态是非常重要的参数&#x…...

PaddleOCR封装,在线服务化部署实战(python部署,超新手教程)
OCR,即光学字符识别(Optical Character Recognition),是一种将图像中的文字转换为机器编码文字的技术。这种技术可以识别和转换各种来源的文本,包括扫描文档、照片中的文字、手写笔记等。光学字符识别(OCR&…...
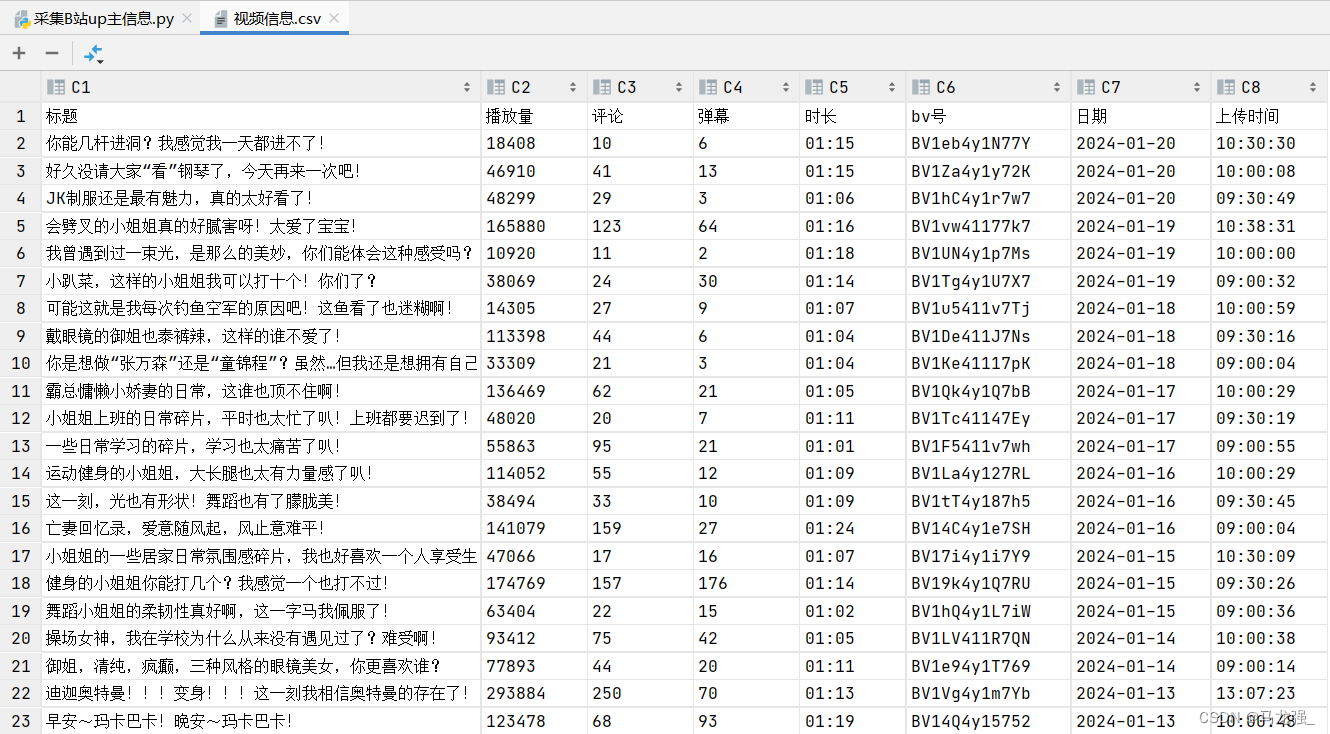
采集B站up主视频信息
一、网页信息(示例网址:https://space.bilibili.com/3493110839511225/video) 二、查看响应数据 三、查看数据包内容 四、相关代码(代码内容未进行翻页爬取) # Time: 2024/1/19 16:42 # Author: 马龙强 # File: 采集B…...

Laykefu客服系统 任意文件上传漏洞复现
0x01 产品简介 Laykefu 是一款基于workerman+gatawayworker+thinkphp5搭建的全功能webim客服系统,旨在帮助企业有效管理和提供优质的客户服务。 0x02 漏洞概述 Laykefu客服系统/admin/users/upavatar.html接口处存在文件上传漏洞,而且当请求中Cookie中的”user_name“不为…...

《幻兽帕鲁》服务器该如何选购
幻兽帕鲁作为目前火爆的一款游戏,幻兽帕鲁的服务器要能够承受其强大的力量和能力,需要具备一定的配置和性能。因此针对<幻兽帕鲁>这款游戏我们来总结一些可能用于承载幻兽帕鲁的服务器类型: 高性能服务器:幻兽帕鲁的能力强大,可能需要…...

比较有创意的网站
有创意的网站通常展示了独特的设计、交互或内容。以下是一些备受赞誉的有创意的网站,你可以参考: Awwwards: Awwwards 是一个评选并展示全球最优秀网站的平台。你可以在这里找到很多有创意的网站设计。 Awwwards CSS Design Awards: 类似于Awwwards&…...
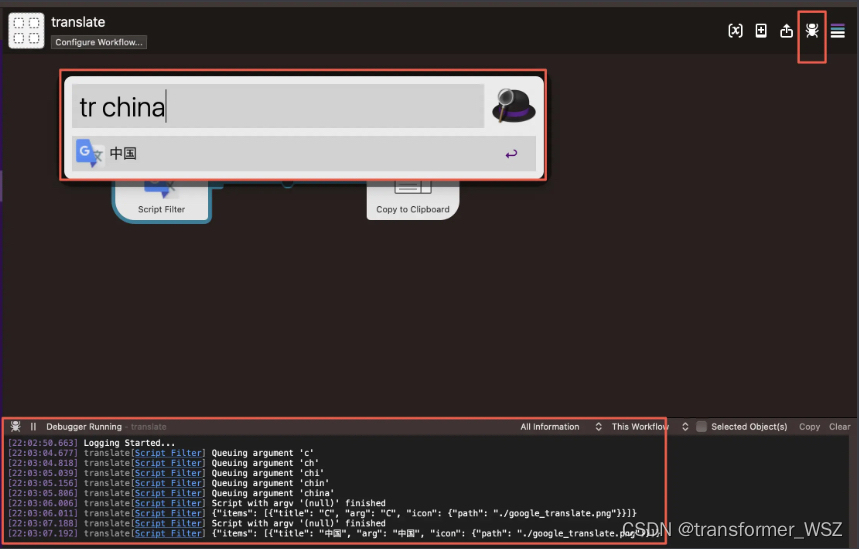
alfred自定义谷歌翻译workflow
如果要实现自定义workflow,则必须安装付费版的alfred,囊中羞涩的话可以自行淘宝。自定义步骤如下: 1. 新建空的workflow,填写基本信息 2. 开发python脚本 打开该workflow所在目录,进行下面步骤: 首先安装…...
【网络安全 -> 防御与保护】专栏文章索引
为了方便 快速定位 和 便于文章间的相互引用等 作为一个快速准确的导航工具 网络安全——防御与保护 (一).信息安全概述 (二).防火墙组网...

用户资源(菜单)控制学习使用
效果图 第一步 需要再定义常量资源 //信访听证 资源前缀public static final String RESPREFIX_MODULE_XINFTZ_"module_xinftz_";//听证专家库public static final ConstantItem RES_MODULE_XINFTZ_TINGZZJK new ConstantItem(RESPREFIX_MODULE_XINFTZ_ "tin…...

邦芒支招:十大秘诀助你轻松进名企
找到一份理想的工作是大学毕业生们最大的心愿,而进入那些知名的大企业更是广大毕业生的梦想。如何应付这些企业的面试成为了毕业生们最为关注的话题。 这些名企的面试往往有一定的程序,绝非草草而就。因此,一定要有所准备才能“百战不殆”。而要在面试前得到有关信息,常常采用…...
)
5G_射频测试_参考规范(一)
参考规范: • Base Station (BS) conformance testing(重点limitation)Directory Listing /ftp/Specs/archive/38_series/38.104 (3gpp.org) • Conducted conformance testing(传导测试)3GPP 38.141-1 6.7 Tran…...

Linux链表操作全解析
Linux C语言链表深度解析与实战技巧 一、链表基础概念与内核链表优势1.1 为什么使用链表?1.2 Linux 内核链表与用户态链表的区别 二、内核链表结构与宏解析常用宏/函数 三、内核链表的优点四、用户态链表示例五、双向循环链表在内核中的实现优势5.1 插入效率5.2 安全…...

《Qt C++ 与 OpenCV:解锁视频播放程序设计的奥秘》
引言:探索视频播放程序设计之旅 在当今数字化时代,多媒体应用已渗透到我们生活的方方面面,从日常的视频娱乐到专业的视频监控、视频会议系统,视频播放程序作为多媒体应用的核心组成部分,扮演着至关重要的角色。无论是在个人电脑、移动设备还是智能电视等平台上,用户都期望…...

pam_env.so模块配置解析
在PAM(Pluggable Authentication Modules)配置中, /etc/pam.d/su 文件相关配置含义如下: 配置解析 auth required pam_env.so1. 字段分解 字段值说明模块类型auth认证类模块,负责验证用户身份&am…...

Linux云原生安全:零信任架构与机密计算
Linux云原生安全:零信任架构与机密计算 构建坚不可摧的云原生防御体系 引言:云原生安全的范式革命 随着云原生技术的普及,安全边界正在从传统的网络边界向工作负载内部转移。Gartner预测,到2025年,零信任架构将成为超…...
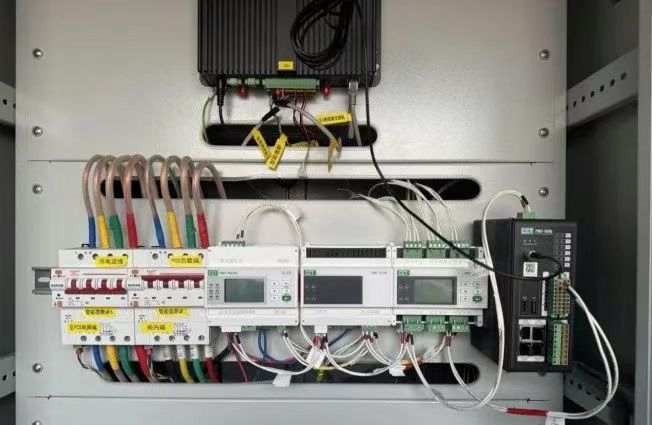
IT供电系统绝缘监测及故障定位解决方案
随着新能源的快速发展,光伏电站、储能系统及充电设备已广泛应用于现代能源网络。在光伏领域,IT供电系统凭借其持续供电性好、安全性高等优势成为光伏首选,但在长期运行中,例如老化、潮湿、隐裂、机械损伤等问题会影响光伏板绝缘层…...

网络编程(UDP编程)
思维导图 UDP基础编程(单播) 1.流程图 服务器:短信的接收方 创建套接字 (socket)-----------------------------------------》有手机指定网络信息-----------------------------------------------》有号码绑定套接字 (bind)--------------…...
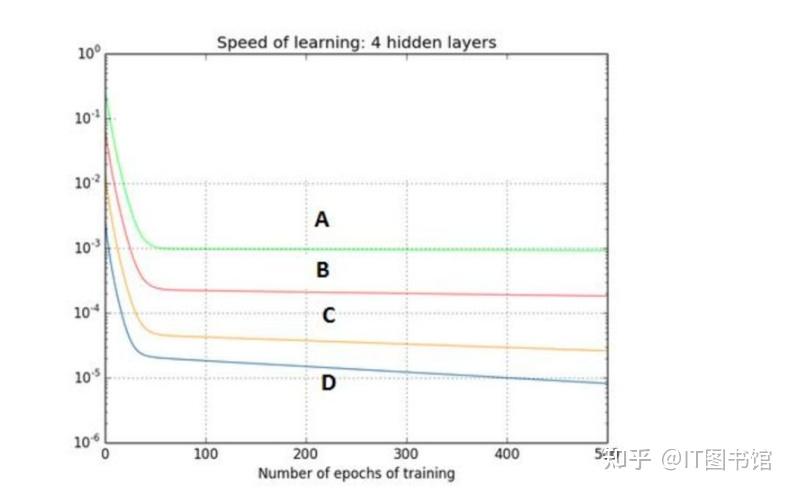
深度学习习题2
1.如果增加神经网络的宽度,精确度会增加到一个特定阈值后,便开始降低。造成这一现象的可能原因是什么? A、即使增加卷积核的数量,只有少部分的核会被用作预测 B、当卷积核数量增加时,神经网络的预测能力会降低 C、当卷…...

MacOS下Homebrew国内镜像加速指南(2025最新国内镜像加速)
macos brew国内镜像加速方法 brew install 加速formula.jws.json下载慢加速 🍺 最新版brew安装慢到怀疑人生?别怕,教你轻松起飞! 最近Homebrew更新至最新版,每次执行 brew 命令时都会自动从官方地址 https://formulae.…...

es6+和css3新增的特性有哪些
一:ECMAScript 新特性(ES6) ES6 (2015) - 革命性更新 1,记住的方法,从一个方法里面用到了哪些技术 1,let /const块级作用域声明2,**默认参数**:函数参数可以设置默认值。3&#x…...
Spring AOP代理对象生成原理
代理对象生成的关键类是【AnnotationAwareAspectJAutoProxyCreator】,这个类继承了【BeanPostProcessor】是一个后置处理器 在bean对象生命周期中初始化时执行【org.springframework.beans.factory.config.BeanPostProcessor#postProcessAfterInitialization】方法时…...