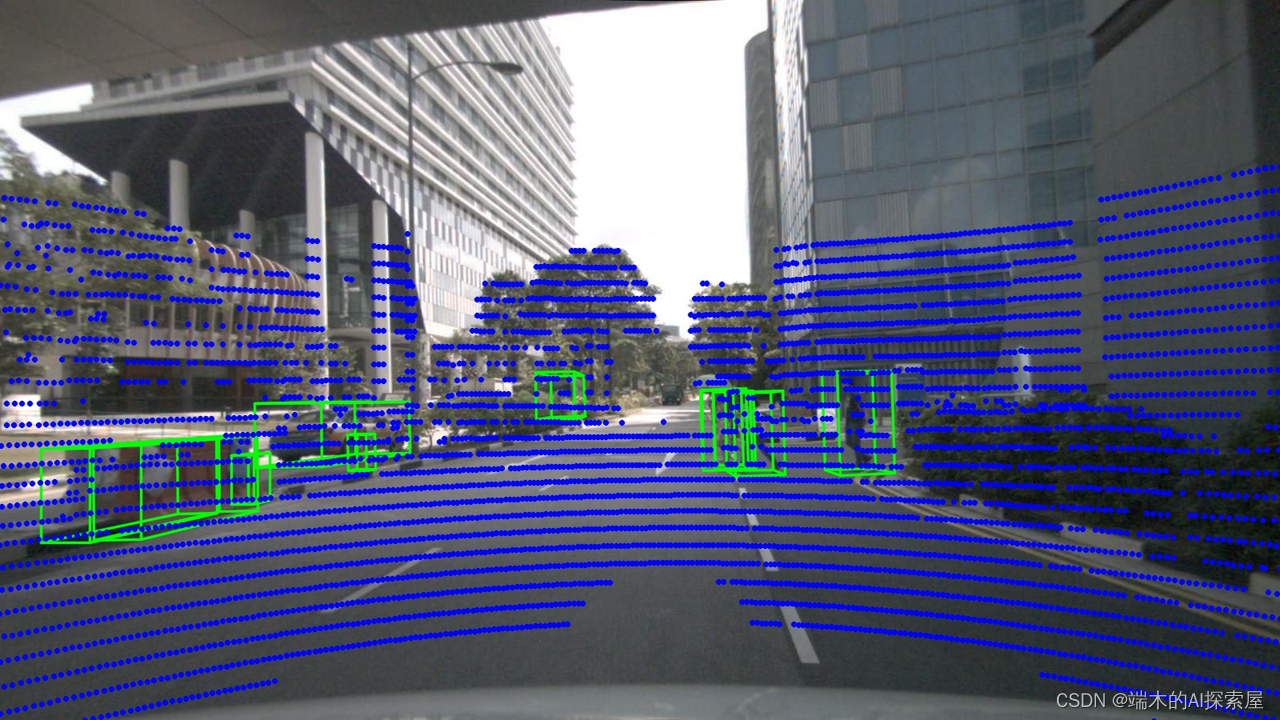
Nuscenes数据集点云数据如何转换到图像上
零、概要
注意:该文章是手写ai自动驾驶,Nuscenes数据集的笔记。
- 首先,学习需要使用到 nuScenes 数据集。python 工具需要使用到 nuscenes-devkit、pyquaternion
from nuscenes.nuscenes import NuScenes
from pyquaternion import Quaternion # 四元数操作的包
https://github.com/nutonomy/nuscenes-devkit/tree/master
-
官网https://github.com/nutonomy/nuscenes-devkit/blob/master/python-sdk/tutorials/nuscenes_tutorial.ipynb可以看非常好
-
https://www.nuscenes.org/nuscenes#explore该网址能够可视化了解nuscenes数据集。
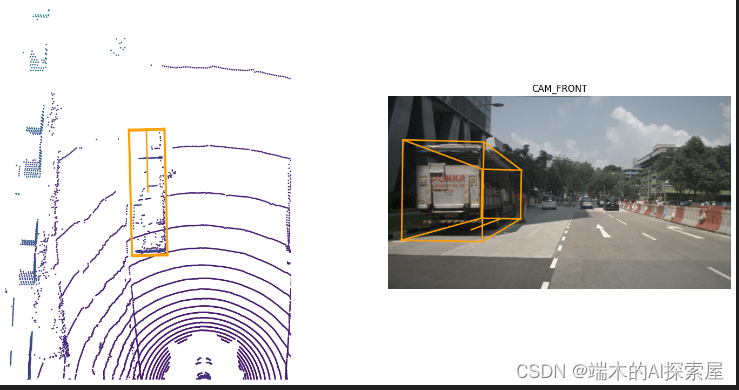
一、提出疑问
- 如何将Lidar的点与图片对应,画出
二、代码大体了解
# pip install nuscenes-devkit # tingfeng1 需要包 nuscenes-devkit
from nuscenes.nuscenes import NuScenes
from nuscenes.utils.data_classes import Box
from pyquaternion import Quaternion
import numpy as np
import cv2
import osnp.set_printoptions(precision=3, suppress=True)version = "mini"
dataroot = "/data/mini"
nuscenes = NuScenes(version='v1.0-{}'.format(version), dataroot=dataroot, verbose=False) # tingfeng2 实例化类NuScenescameras = ['CAM_FRONT_LEFT', 'CAM_FRONT', 'CAM_FRONT_RIGHT', 'CAM_BACK_LEFT', 'CAM_BACK', 'CAM_BACK_RIGHT']
sample = nuscenes.sample[0] # tingfeng3获取第一个样本def to_matrix4x4_2(rotation, translation, inverse=True):output = np.eye(4)output[:3, :3] = rotationoutput[:3, 3] = translationif inverse:output = np.linalg.inv(output)return outputdef to_matrix4x4(m):output = np.eye(4)output[:3, :3] = mreturn output# tingfeng4 拿到样本后,获取Lidar的信息
# Lidar的点云是基于Lidar坐标系的
# 需要将lidar的坐标转换到ego,然后ego到global
lidar_sample_data = nuscenes.get('sample_data', sample['data']["LIDAR_TOP"])
lidar_file = os.path.join(nuscenes.dataroot, lidar_sample_data["filename"])
lidar_pointcloud = np.fromfile(lidar_file, dtype=np.float32).reshape(-1, 5)
ego_pose = nuscenes.get('ego_pose', lidar_sample_data['ego_pose_token'])
ego_to_global = to_matrix4x4_2(Quaternion(ego_pose['rotation']).rotation_matrix, np.array(ego_pose['translation']), False)
lidar_sensor = nuscenes.get('calibrated_sensor', lidar_sample_data['calibrated_sensor_token'])
lidar_to_ego = to_matrix4x4_2(Quaternion(lidar_sensor['rotation']).rotation_matrix, np.array(lidar_sensor['translation']), False)
lidar_to_global = ego_to_global @ lidar_to_ego
lidar_points = np.concatenate([lidar_pointcloud[:, :3], np.ones((len(lidar_pointcloud), 1))], axis=1)
lidar_points = lidar_points @ lidar_to_global.T # tingfeng5 点云转到global坐标系# tingfeng6 获取每一个camera的信息
# 1. annotation标注是global坐标系的
# 2. 由于时间戳的缘故,每个camera/lidar/radar都有ego_pose用于修正差异
for camera in cameras:camera_sample_data = nuscenes.get('sample_data', sample['data'][camera])image_file = os.path.join(nuscenes.dataroot, camera_sample_data["filename"])ego_pose = nuscenes.get('ego_pose', camera_sample_data['ego_pose_token'])global_to_ego = to_matrix4x4_2(Quaternion(ego_pose['rotation']).rotation_matrix, np.array(ego_pose['translation']))camera_sensor = nuscenes.get('calibrated_sensor', camera_sample_data['calibrated_sensor_token']) camera_intrinsic = to_matrix4x4(camera_sensor['camera_intrinsic'])ego_to_camera = to_matrix4x4_2(Quaternion(camera_sensor['rotation']).rotation_matrix, np.array(camera_sensor['translation']))global_to_image = camera_intrinsic @ ego_to_camera @ global_to_ego # tingfeng7 根据相机中得到的信息得到的三个矩阵,将global坐标系的坐标转换到image上image = cv2.imread(image_file) for annotation_token in sample['anns']: # tingfeng8 标注的框的信息,在sample['anns']中,遍历标注框instance = nuscenes.get('sample_annotation', annotation_token)box = Box(instance['translation'], instance['size'], Quaternion(instance['rotation']))corners = np.ones((4, 8))corners[:3, :] = box.corners() corners = (global_to_image @ corners)[:3] # tingfeng11 注意角点是global坐标,这里转换到image上corners[:2] /= corners[[2]]corners = corners.T.astype(int) # tingfeng9 到此是计算框的角点ix, iy = [0, 1, 2, 3, 0, 1, 2, 3, 4, 5, 6, 7], [4, 5, 6, 7, 1, 2, 3, 0, 5, 6, 7, 4]for p0, p1 in zip(corners[ix], corners[iy]):if p0[2] <= 0 or p1[2] <= 0: continuecv2.line(image, (p0[0], p0[1]), (p1[0], p1[1]), (0, 255, 0), 2, 16) # tingfeng10 到此是把角点划到image上image_based_points = lidar_points @ global_to_image.T # tingfeng12 雷达的信息也投射到image上image_based_points[:, :2] /= image_based_points[:, [2]]show_points = image_based_points[image_based_points[:, 2] > 0][:, :2].astype(np.int32)for x, y in show_points:cv2.circle(image, (x, y), 3, (255, 0, 0), -1, 16) # # tingfeng13 lidar的信息画到image上cv2.imwrite(f"{camera}.jpg", image)
三、手写
3.1 了解 NuScenes 的实例对象
-
了解如何实例化,参数需要什么
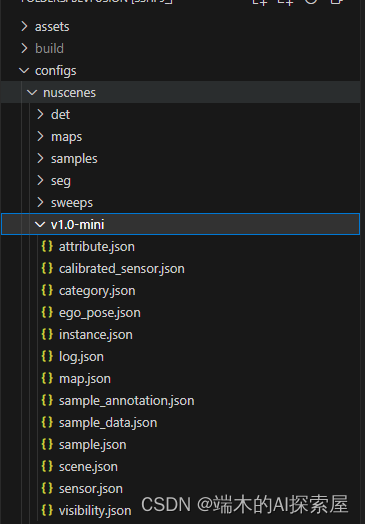
- 第一个参数 version。目前理解是给 nuscenes 下载下来。那个有一堆 json 文件的文件夹名字。
- 通常是
v1.0-{mini, test, trainval}
- 通常是
- 第二个参数是数据集根目录。图片上是 nuscenes
- 第一个参数 version。目前理解是给 nuscenes 下载下来。那个有一堆 json 文件的文件夹名字。
-
了解如何获取数据,数据是什么样
- 如下实例化后。就能简单查看里面的数据了。
from nuscenes.nuscenes import NuScenes
import numpy as np
import cv2
import os# 1. 实例化NuScenes
version = "v1.0-mini" # 因为我们是用的是mini数据集
dataroot = "/home/shenlan09/tingfeng/BEVFusion/BEVfusion/bevfusion/configs/nuscenes"
# 我的数据集放这里了,我用的绝对路径
nuscenes = NuScenes(version=version, dataroot=dataroot, verbose=False)
# print(len(nuscenes.sample)) # 404sample = nuscenes.sample[0] # 读取sample中第一个数据,具体了解
print(nuscenes)
- 另外。官方教程上,拿到第一个 sample 可以用
%matplotlib inline
from nuscenes.nuscenes import NuScenes
nusc = NuScenes(version='v1.0-mini', dataroot="/home/shenlan09/tingfeng/BEVFusion/BEVfusion/bevfusion/configs/nuscenes", verbose=True)
'''
Loading NuScenes tables for version v1.0-mini...
23 category,
8 attribute,
4 visibility,
911 instance,
12 sensor,
120 calibrated_sensor,
31206 ego_pose,
8 log,
10 scene,
404 sample,
31206 sample_data,
18538 sample_annotation,
4 map,
Done loading in 0.5 seconds.
============================Reverse indexing ...
Done reverse indexing in 0.1 seconds.
====================================='''
nusc.list_scenes()'''
scene-0061, Parked truck, construction, intersectio... [18-07-24 03:28:47] 19s, singapore-onenorth, #anns:4622
scene-0103, Many peds right, wait for turning car, ... [18-08-01 19:26:43] 19s, boston-seaport, #anns:2046
scene-0655, Parking lot, parked cars, jaywalker, be... [18-08-27 15:51:32] 20s, boston-seaport, #anns:2332
scene-0553, Wait at intersection, bicycle, large tr... [18-08-28 20:48:16] 20s, boston-seaport, #anns:1950
scene-0757, Arrive at busy intersection, bus, wait ... [18-08-30 19:25:08] 20s, boston-seaport, #anns:592
scene-0796, Scooter, peds on sidewalk, bus, cars, t... [18-10-02 02:52:24] 20s, singapore-queensto, #anns:708
scene-0916, Parking lot, bicycle rack, parked bicyc... [18-10-08 07:37:13] 20s, singapore-queensto, #anns:2387
scene-1077, Night, big street, bus stop, high speed... [18-11-21 11:39:27] 20s, singapore-hollandv, #anns:890
scene-1094, Night, after rain, many peds, PMD, ped ... [18-11-21 11:47:27] 19s, singapore-hollandv, #anns:1762
scene-1100, Night, peds in sidewalk, peds cross cro... [18-11-21 11:49:47] 19s, singapore-hollandv, #anns:935
'''
my_scene = nusc.scene[0]
'''
{'token': 'cc8c0bf57f984915a77078b10eb33198',
'log_token': '7e25a2c8ea1f41c5b0da1e69ecfa71a2',
'nbr_samples': 39,
'first_sample_token': 'ca9a282c9e77460f8360f564131a8af5',
'last_sample_token': 'ed5fc18c31904f96a8f0dbb99ff069c0',
'name': 'scene-0061',
'description': 'Parked truck, construction, intersection, turn left, following a van'}
'''first_sample_token = my_scene['first_sample_token']# The rendering command below is commented out because it tends to crash in notebooksnusc.render_sample(first_sample_token) # 能够在 ipynb 文件中渲染3.1.1 数据格式
- (nuscenes.sample[0]的打印输出信息)nuscenes.sample[0]是指第一个样本。是某时刻的所有数据
- 包含多个相机数据token、Lidar数据对应的token。anns是3D标注边框的token
{'token': 'ca9a282c9e77460f8360f564131a8af5',
'timestamp': 1532402927647951,
'prev': '',
'next': '39586f9d59004284a7114a68825e8eec',
'scene_token': 'cc8c0bf57f984915a77078b10eb33198',
'data!!传感器信息!!': {'RADAR_FRONT': '==每个里面的字符串叫token,根据这个就能找到位置的信息==37091c75b9704e0daa829ba56dfa0906', 'RADAR_FRONT_LEFT': '11946c1461d14016a322916157da3c7d', 'RADAR_FRONT_RIGHT': '491209956ee3435a9ec173dad3aaf58b', 'RADAR_BACK_LEFT': '312aa38d0e3e4f01b3124c523e6f9776', 'RADAR_BACK_RIGHT': '07b30d5eb6104e79be58eadf94382bc1', 'LIDAR_TOP': '9d9bf11fb0e144c8b446d54a8a00184f', 'CAM_FRONT': 'e3d495d4ac534d54b321f50006683844', 'CAM_FRONT_RIGHT': 'aac7867ebf4f446395d29fbd60b63b3b', 'CAM_BACK_RIGHT': '79dbb4460a6b40f49f9c150cb118247e', 'CAM_BACK': '03bea5763f0f4722933508d5999c5fd8', 'CAM_BACK_LEFT': '43893a033f9c46d4a51b5e08a67a1eb7', 'CAM_FRONT_LEFT': 'fe5422747a7d4268a4b07fc396707b23'}, 'anns': ['ef63a697930c4b20a6b9791f423351da', '6b89da9bf1f84fd6a5fbe1c3b236f809', '924ee6ac1fed440a9d9e3720aac635a0', '91e3608f55174a319246f361690906ba', 'cd051723ed9c40f692b9266359f547af', '36d52dfedd764b27863375543c965376', '70af124fceeb433ea73a79537e4bea9e', '63b89fe17f3e41ecbe28337e0e35db8e', 'e4a3582721c34f528e3367f0bda9485d', 'fcb2332977ed4203aa4b7e04a538e309', 'a0cac1c12246451684116067ae2611f6', '02248ff567e3497c957c369dc9a1bd5c', '9db977e264964c2887db1e37113cddaa', 'ca9c5dd6cf374aa980fdd81022f016fd', '179b8b54ee74425893387ebc09ee133d', '5b990ac640bf498ca7fd55eaf85d3e12', '16140fbf143d4e26a4a7613cbd3aa0e8', '54939f11a73d4398b14aeef500bf0c23', '83d881a6b3d94ef3a3bc3b585cc514f8', '74986f1604f047b6925d409915265bf7', 'e86330c5538c4858b8d3ffe874556cc5', 'a7bd5bb89e27455bbb3dba89a576b6a1', 'fbd9d8c939b24f0eb6496243a41e8c41', '198023a1fb5343a5b6fad033ab8b7057', 'ffeafb90ecd5429cba23d0be9a5b54ee', 'cc636a58e27e446cbdd030c14f3718fd', '076a7e3ec6244d3b84e7df5ebcbac637', '0603fbaef1234c6c86424b163d2e3141', 'd76bd5dcc62f4c57b9cece1c7bcfabc5', '5acb6c71bcd64aa188804411b28c4c8f', '49b74a5f193c4759b203123b58ca176d', '77519174b48f4853a895f58bb8f98661', 'c5e9455e98bb42c0af7d1990db1df0c9', 'fcc5b4b5c4724179ab24962a39ca6d65', '791d1ca7e228433fa50b01778c32449a', '316d20eb238c43ef9ee195642dd6e3fe', 'cda0a9085607438c9b1ea87f4360dd64', 'e865152aaa194f22b97ad0078c012b21', '7962506dbc24423aa540a5e4c7083dad', '29cca6a580924b72a90b9dd6e7710d3e', 'a6f7d4bb60374f868144c5ba4431bf4c', 'f1ae3f713ba946069fa084a6b8626fbf', 'd7af8ede316546f68d4ab4f3dbf03f88', '91cb8f15ed4444e99470d43515e50c1d', 'bc638d33e89848f58c0b3ccf3900c8bb', '26fb370c13f844de9d1830f6176ebab6', '7e66fdf908d84237943c833e6c1b317a', '67c5dbb3ddcc4aff8ec5140930723c37', 'eaf2532c820740ae905bb7ed78fb1037', '3e2d17fa9aa5484d9cabc1dfca532193', 'de6bd5ffbed24aa59c8891f8d9c32c44', '9d51d699f635478fbbcd82a70396dd62', 'b7cbc6d0e80e4dfda7164871ece6cb71', '563a3f547bd64a2f9969278c5ef447fd', 'df8917888b81424f8c0670939e61d885', 'bb3ef5ced8854640910132b11b597348', 'a522ce1d7f6545d7955779f25d01783b', '1fafb2468af5481ca9967407af219c32', '05de82bdb8484623906bb9d97ae87542', 'bfedb0d85e164b7697d1e72dd971fb72', 'ca0f85b4f0d44beb9b7ff87b1ab37ff5', 'bca4bbfdef3d4de980842f28be80b3ca', 'a834fb0389a8453c810c3330e3503e16', '6c804cb7d78943b195045082c5c2d7fa', 'adf1594def9e4722b952fea33b307937', '49f76277d07541c5a584aa14c9d28754', '15a3b4d60b514db5a3468e2aef72a90c', '18cc2837f2b9457c80af0761a0b83ccc', '2bfcc693ae9946daba1d9f2724478fd4']}
- 直接使用下方代码,可以直接打印
nuscenes.list_sample(sample["token"])
'''
Sample: ca9a282c9e77460f8360f564131a8af5sample_data_token: 37091c75b9704e0daa829ba56dfa0906, mod: radar, channel: RADAR_FRONT
sample_data_token: 11946c1461d14016a322916157da3c7d, mod: radar, channel: RADAR_FRONT_LEFT
sample_data_token: 491209956ee3435a9ec173dad3aaf58b, mod: radar, channel: RADAR_FRONT_RIGHT
sample_data_token: 312aa38d0e3e4f01b3124c523e6f9776, mod: radar, channel: RADAR_BACK_LEFT
sample_data_token: 07b30d5eb6104e79be58eadf94382bc1, mod: radar, channel: RADAR_BACK_RIGHT
sample_data_token: 9d9bf11fb0e144c8b446d54a8a00184f, mod: lidar, channel: LIDAR_TOP
sample_data_token: e3d495d4ac534d54b321f50006683844, mod: camera, channel: CAM_FRONT
sample_data_token: aac7867ebf4f446395d29fbd60b63b3b, mod: camera, channel: CAM_FRONT_RIGHT
sample_data_token: 79dbb4460a6b40f49f9c150cb118247e, mod: camera, channel: CAM_BACK_RIGHT
sample_data_token: 03bea5763f0f4722933508d5999c5fd8, mod: camera, channel: CAM_BACK
sample_data_token: 43893a033f9c46d4a51b5e08a67a1eb7, mod: camera, channel: CAM_BACK_LEFT
sample_data_token: fe5422747a7d4268a4b07fc396707b23, mod: camera, channel: CAM_FRONT_LEFTsample_annotation_token: ef63a697930c4b20a6b9791f423351da, category: human.pedestrian.adult
sample_annotation_token: 6b89da9bf1f84fd6a5fbe1c3b236f809, category: human.pedestrian.adult
sample_annotation_token: 924ee6ac1fed440a9d9e3720aac635a0, category: vehicle.car
sample_annotation_token: 91e3608f55174a319246f361690906ba, category: human.pedestrian.adult
sample_annotation_token: cd051723ed9c40f692b9266359f547af, category: movable_object.trafficcone
sample_annotation_token: 36d52dfedd764b27863375543c965376, category: vehicle.bicycle
sample_annotation_token: 70af124fceeb433ea73a79537e4bea9e, category: human.pedestrian.adult
sample_annotation_token: 63b89fe17f3e41ecbe28337e0e35db8e, category: vehicle.car
sample_annotation_token: e4a3582721c34f528e3367f0bda9485d, category: human.pedestrian.adult
sample_annotation_token: fcb2332977ed4203aa4b7e04a538e309, category: movable_object.barrier
...
sample_annotation_token: 49f76277d07541c5a584aa14c9d28754, category: vehicle.car
sample_annotation_token: 15a3b4d60b514db5a3468e2aef72a90c, category: movable_object.barrier
sample_annotation_token: 18cc2837f2b9457c80af0761a0b83ccc, category: movable_object.barrier
sample_annotation_token: 2bfcc693ae9946daba1d9f2724478fd4, category: movable_object.barrier
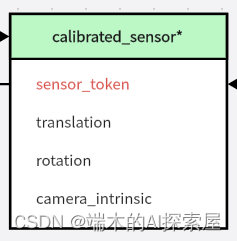
'''3.1.2 数据格式–官网图例
- 这个图例学完下面的代码,回来看。就能取到自己想要的数据。
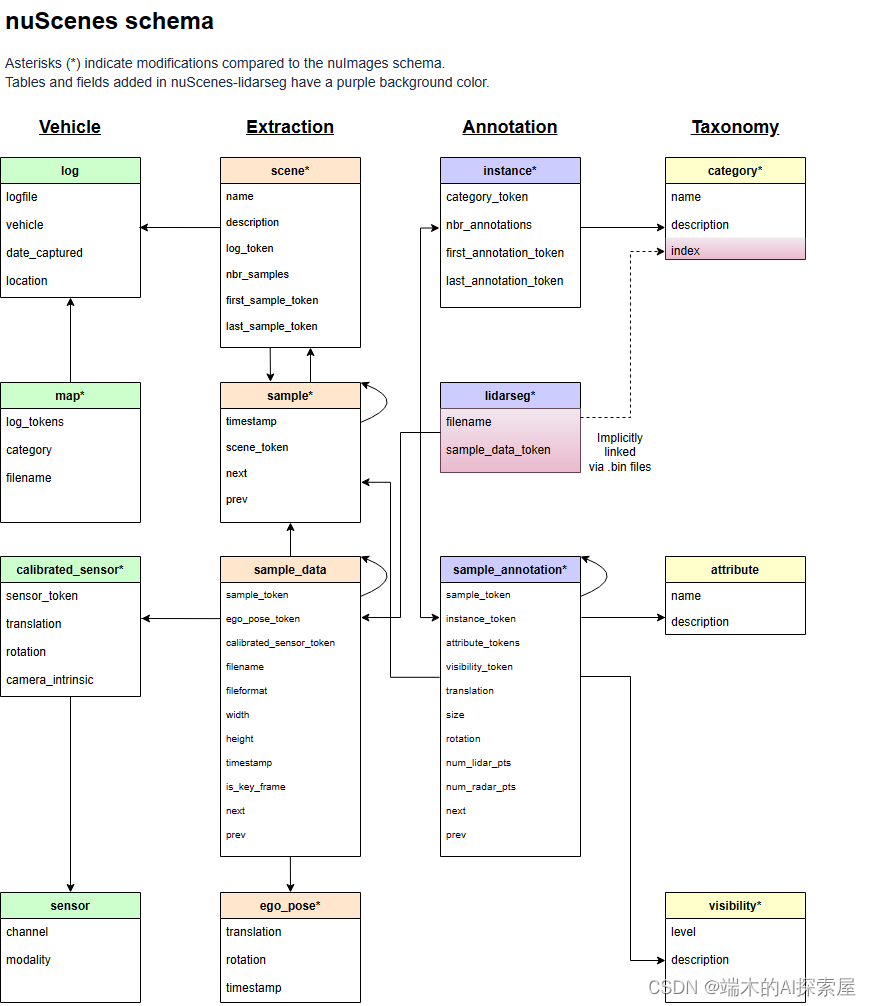
- 得到sample_data,获取不同数据需使用不同代码
- 通过sample_data 的filename 定位到具体文件。用 np.fromfile读取数据
- 通过sample_data 的calibrated_sensor_token,用nuscenes定位定位calibrated_sensor,拿到标定数据
3.1.2.1 上图理解–sample_token 获取 sample_data
sample["data"]["LIDAR_TOP"]sample["data"]中存储了 RADAR LIDAR CAM的信息sample["data"]["LIDAR_TOP"]能拿到相机对应的sample_token- 图中的弧线箭头,我理解为通过这个 sample_token 是能够获得 sample_data的
sample_data = nuscenes.get('sample_data', lidar_sample_token)是通过sample_token 获得 sample_data的具体方法- 当得到了 sample_data 我们就能得到 sample_data 中的其他信息
print(sample_data)
{'token': '9d9bf11fb0e144c8b446d54a8a00184f',
'sample_token': 'ca9a282c9e77460f8360f564131a8af5',
'ego_pose_token': '9d9bf11fb0e144c8b446d54a8a00184f',
'calibrated_sensor_token': 'a183049901c24361a6b0b11b8013137c',
'timestamp': 1532402927647951,
'fileformat': 'pcd',
'is_key_frame': True,
'height': 0,
'width': 0,
'filename': 'samples/LIDAR_TOP/n015-2018-07-24-11-22-45+0800__LIDAR_TOP__1532402927647951.pcd.bin',
'prev': '',
'next': '0cedf1d2d652468d92d23491136b5d15',
'sensor_modality': 'lidar',
'channel': 'LIDAR_TOP'}
可视化
- 会输出名字为123.png的图像
nuscenes.render_sample_data(lidar_sample_data["token"], out_path="./123")3.1.2.2 通过sampe_data中的filename拿到具体的雷达数据.pcd.bin文件
lidar_filename = sample_data["filename"] # samples/LIDAR_TOP/n015-2018-07-24-11-22-45+0800__LIDAR_TOP__1532402927647951.pcd.bin
data = np.fromfile(os.path.join(dataroot, lidar_filename), dtype=np.float32).reshape(-1, 5)
print(data.shape) # (34688, 5) #x y z intensity ring_index
- 实际上拿到的是某种路径:
samples/LIDAR_TOP/n015-2018-07-24-11-22-45+0800__LIDAR_TOP__1532402927647951.pcd.bin - 暂时理解为
os.path.join(dataroot, lidar_filename)
3.2 坐标系的理解
3. 坐标系3.1 全局坐标系,global coordinate- 可以简单的认为,车辆在t0时刻的位置认为是全局坐标系的原点 3.2 车体坐标系,ego_pose. ego coordinate- 以车体为原点的坐标系3.3 传感器坐标系- lidar 的坐标系- camera 的坐标系- radar 的坐标系
3.3 标定的理解
- 第一个理解。整个过程如下:
- 即将 lidar 点云转换到 global,再转换到图片上
过程为 timestamp = t0 时的lidar_points -> ego_pose0 -> global -> ego_pose1 -> camera -> intrinsic -> image
- 第二个理解,拿到 4*4 变换矩阵的过程
4. 标定calibater
lidar的标定,获得的结果是:lidar相对于ego而言的位置(translation),和旋转(rotation) - translation 可以用3个float数字表示位置- 相对于ego而言的位置- rotation则是用4个float表示旋转,用的是四元数camera的标定,获得的结果是:camera相对于ego而言的位置 (translation),和旋转(rotation) - translation 可以用3个float数字表示位置- 相对于ego而言的位置- rotation则是用4个float表示旋转,用的是四元数- carmera 还多了一个camera_intrinsic 相机的内参(3d->2d平面)- 相机畸变参数(目前nuScenes数据集不考虑)
- 通过
lidar_calibrated_data = nuscenes.get("calibrated_sensor", lidar_sample_data["calibrated_sensor_token"])类似的语句,就能拿到传感器的标定
3.3.1 LIDAR calibrated_sensor
- 主要完成 lidar_points -> ego_pose0 -> global
拿到 lidar 相对 ego 的标定数据
通过 lidar_calibrated_data = nuscenes.get("calibrated_sensor", lidar_sample_data["calibrated_sensor_token"]) 拿到 lidar 的标定数据。
标定数据 rotation 四元数 转 旋 转矩阵的过程。
'''
# lidar_calibrated_data = nuscenes.get("calibrated_sensor", lidar_sample_data["calibrated_sensor_token"])
# calibrated_sensor 中的rotation属性使用四元数
lidar_calibrated_data["rotation"] ----》[0.7077955119163518, -0.006492242056004365, 0.010646214713995808, -0.7063073142877817]Quaternion(lidar_calibrated_data["rotation"]).rotation_matrix- 使用四元数转换成旋转矩阵,如下:[[ 0.00203327 0.99970406 0.02424172][-0.99998053 0.00217566 -0.00584864][-0.00589965 -0.02422936 0.99968902]]
'''
旋转矩阵平移矩阵合并
理解lidar 旋转矩阵 与 平移矩阵 合并
- 旋转矩阵是 3*3 与 平移矩阵
- 合并就是创建一个4*4 的对角矩阵,把前三行前三列替换为旋转矩阵。前三行第四列替换为
- 二维数据的矩阵一般22就搞定,旋转和平移合并就变成33.这里用二维,简单理解3维为啥要变成4*4。 [ s c a l e 0 x 0 s c a l e y 0 0 1 ] [ x 1 y 1 1 ] = [ x 2 y 2 1 ] \begin{bmatrix} scale&0&x\\ 0&scale&y \\ 0&0&1\end{bmatrix} \begin{bmatrix} x1\\ y1 \\ 1\end{bmatrix} = \begin{bmatrix} x2\\ y2 \\ 1\end{bmatrix} scale000scale0xy1 x1y11 = x2y21
- 代码
def get_matrix(calibrated_data):output = np.eye(4)output[:3, :3] = Quaternion(calibrated_data["rotation"]).rotation_matrixoutput[:3, 3] = calibrated_data["translation"]return outputlidar_calibrated_data = nuscenes.get("calibrated_sensor", lidar_sample_data["calibrated_sensor_token"])
# 6.1.2
# lidar_to_ego_matrix 是基于ego而言的。
# point = lidar_to_ego_matrix @ lidar_points.T 代表了lidar -> ego 的过程。
lidar_to_ego_matrix = get_matrix(lidar_calibrated_data)
print(lidar_to_ego_matrix)
'''
[[ 0.00203327 0.99970406 0.02424172 0.943713 ][-0.99998053 0.00217566 -0.00584864 0. ][-0.00589965 -0.02422936 0.99968902 1.84023 ][ 0. 0. 0. 1. ]]
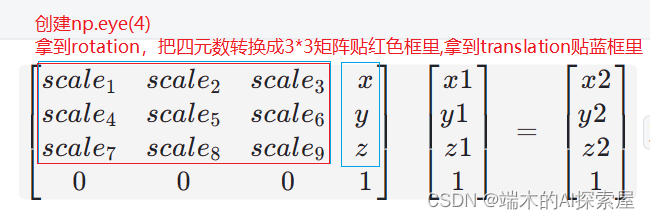
'''- $$\begin{bmatrix} scale_1&scale_2&scale_3&x\\ scale_4&scale_5&scale_6&y \\ scale_7&scale_8&scale_9&z \\
0&0&0&1\end{bmatrix} \begin{bmatrix} x1\\ y1 \\ z1 \\1\end{bmatrix} = \begin{bmatrix} x2\\ y2 \\z2\\ 1\end{bmatrix} $$lidar_points.T 是方便矩阵乘法
[图片]#### 得到 lidar_to_ego_matrix```python
lidar_calibrated_data = nuscenes.get("calibrated_sensor", lidar_sample_data["calibrated_sensor_token"])
lidar_to_ego_matrix = get_matrix(lidar_calibrated_data)
print(lidar_to_ego_matrix)
'''
[[ 0.00203327 0.99970406 0.02424172 0.943713 ][-0.99998053 0.00217566 -0.00584864 0. ][-0.00589965 -0.02422936 0.99968902 1.84023 ][ 0. 0. 0. 1. ]]
拿到 ego 相对于 global 的标定
ego_pose_data0 = nuscenes.get("ego_pose", lidar_sample_data["ego_pose_token"])
# print(ego_pose_data0)
'''
{'token': '9d9bf11fb0e144c8b446d54a8a00184f',
'timestamp': 1532402927647951,
'rotation': [0.5720320396729045, -0.0016977771610471074, 0.011798001930183783, -0.8201446642457809],
'translation': [411.3039349319818, 1180.8903791765097, 0.0]}
'''
拿到 ego_to_global_matrix
go_to_global_matrix = get_matrix(ego_pose_data0)
print(ego_to_global_matrix)
'''
[[-3.45552926e-01 9.38257989e-01 1.62825160e-02 4.11303935e+02][-9.38338111e-01 -3.45280305e-01 -1.74097708e-02 1.18089038e+03][-1.07128245e-02 -2.12945025e-02 9.99715849e-01 0.00000000e+00][ 0.00000000e+00 0.00000000e+00 0.00000000e+00 1.00000000e+00]]
'''
具体变换
lidar_to_global_matrix = ego_to_global_matrix @ lidar_to_ego_matrix # lidar-ego-global
global_points = lidar_point @ lidar_to_global_matrix.T # 真正变换点
代码
def get_matrix(calibrated_data, inverse=False):"""args:@calibrated_data : calibrated_sensor对象。一般通过nuscenes.get("calibrated_sensor",token..)得到@inverse : 是否取逆矩阵。具体根据calibrated_sensor对象里面的 rotation 与 translation 计算出一个4*4的旋转平移矩阵。如果inverse设置为ture。则对这个矩阵逆变换"""output = np.eye(4)output[:3, :3] = Quaternion(calibrated_data["rotation"]).rotation_matrixoutput[:3, 3] = calibrated_data["translation"]if inverse:output = np.linalg.inv(output)return outputlidar_calibrated_data = nuscenes.get("calibrated_sensor", lidar_sample_data["calibrated_sensor_token"])# 6.1.2
# lidar_to_ego_matrix 是基于ego而言的。
# point = lidar_to_ego_matrix @ lidar_points.T 代表了lidar -> ego 的过程。
lidar_to_ego_matrix = get_matrix(lidar_calibrated_data)
print(lidar_to_ego_matrix)
'''
[[ 0.00203327 0.99970406 0.02424172 0.943713 ][-0.99998053 0.00217566 -0.00584864 0. ][-0.00589965 -0.02422936 0.99968902 1.84023 ][ 0. 0. 0. 1. ]]
'''# 6.2 timestamp = t0 时的ego_pose0 -> global
# ego_to_global_matrix 是基于ego而言的。
# point = ego_to_global_matrix @ lidar_points.T
ego_pose_data0 = nuscenes.get("ego_pose", lidar_sample_data["ego_pose_token"])
# print(ego_pose_data0)
'''
{'token': '9d9bf11fb0e144c8b446d54a8a00184f',
'timestamp': 1532402927647951,
'rotation': [0.5720320396729045, -0.0016977771610471074, 0.011798001930183783, -0.8201446642457809],
'translation': [411.3039349319818, 1180.8903791765097, 0.0]}
'''
ego_to_global_matrix = get_matrix(ego_pose_data0)
print(ego_to_global_matrix)
'''
[[-3.45552926e-01 9.38257989e-01 1.62825160e-02 4.11303935e+02][-9.38338111e-01 -3.45280305e-01 -1.74097708e-02 1.18089038e+03][-1.07128245e-02 -2.12945025e-02 9.99715849e-01 0.00000000e+00][ 0.00000000e+00 0.00000000e+00 0.00000000e+00 1.00000000e+00]]
'''
3.3.2 相机 camera 的标定
- 主要完成 global -> ego_pose1 -> camera -> intrinsic -> image
- camera 有很多,要循环处理
- 相机标定注意点。求得的变换矩阵后,求逆矩阵
拿到 camera 相对 ego 的标定数据
通过 lidar_calibrated_data = nuscenes.get("calibrated_sensor", lidar_sample_data["calibrated_sensor_token"]) 拿到 lidar 的标定数据。
- 代码
camera_token = sample["data"][cam]
camera_data = nuscenes.get("sample_data", camera_token)image_file = os.path.join(dataroot, camera_data["filename"])
image = cv2.imread(image_file)camera_calibrated_token = camera_data["calibrated_sensor_token"]
camera_calibrated_data = nuscenes.get("calibrated_sensor", camera_calibrated_token)
'''camera多了camera_intrinsic 所以写下来。
{'token': '75ad8e2a8a3f4594a13db2398430d097',
'sensor_token': 'ec4b5d41840a509984f7ec36419d4c09',
'translation': [1.52387798135, 0.494631336551, 1.50932822144],
'rotation': [0.6757265034669446, -0.6736266522251881, 0.21214015046209478, -0.21122827103904068],
'camera_intrinsic': [[1272.5979470598488, 0.0, 826.6154927353808], [0.0, 1272.5979470598488, 479.75165386361925], [0.0, 0.0, 1.0]]}得到camera_to_ego_matrix,然后取逆,得到ego_to_camera_matrix
ego_to_camera_matrix = get_matrix(camera_calibrated_data, True) # 不加True得到的是camera_to_ego_matrix
拿到 ego 相对于 global 的标定
camera_ego_pose = nuscenes.get("ego_pose", camera_data["ego_pose_token"])
拿到 ego_to_global_matrix,然后取逆,得到 global_to_ego_matrix
global_to_ego_matrix = get_matrix(camera_ego_pose, True) # 不加True得到的是ego_to_global_matrix
相比 lidar,新增相机内参矩阵
## 7.2 新增步骤,处理camera_intrinsiccamera_intrinsic = np.eye(4)camera_intrinsic[:3, :3] = camera_calibrated_data["camera_intrinsic"] # shape= 【3 * 3】
具体变换
global_to_image = camera_intrinsic @ ego_to_camera_matrix @ global_to_ego_matrix
3.3.3 画框
for token in sample["anns"]:annotation = nuscenes.get("sample_annotation", token)box = Box(annotation["translation"], annotation['size'], Quaternion(annotation["rotation"]))corners = box.corners().T # box.corners()形状是[3, 8]global_corners = np.concatenate((corners, np.ones((len(corners), 1))), axis=1)image_base_corners = global_corners @ global_to_image.Timage_base_corners[:, :2] /= image_base_corners[:, [2]]image_base_corners = image_base_corners.astype(np.int32)ix, iy = [0, 1, 2, 3, 0, 1, 2, 3, 4, 5, 6, 7], [4, 5, 6, 7, 1, 2, 3, 0, 5, 6, 7, 4]for p0, p1 in zip(image_base_corners[ix], image_base_corners[iy]):if p0[2] <= 0 or p1[2] <= 0: continuecv2.line(image, (p0[0], p0[1]), (p1[0], p1[1]), (0, 255, 0), 2, 16)''' 循环表示,画0 与 4 的边 画1 与 5 的边 画2 与 6 的边 画3 与 7 的边 画0 与 1 的边 画1 与 2 的边 画2 与 3 的边 画3 与 0 的边 画4 与 5 的边 画5 与 6 的边 画6 与 7 的边 画7 与 4 的边 0 ------ 1/ | / |4 ------ 5 || 3 ---|-- 2 | / | /7 ------ 6'''
可视化
nuscenes.render_annotation(token, out_path="./234")
相关文章:
Nuscenes数据集点云数据如何转换到图像上
零、概要 注意:该文章是手写ai自动驾驶,Nuscenes数据集的笔记。 首先,学习需要使用到 nuScenes 数据集。python 工具需要使用到 nuscenes-devkit、pyquaternion from nuscenes.nuscenes import NuScenes from pyquaternion import Quatern…...
【C语言期末】商品管理系统
本文资源:https://download.csdn.net/download/weixin_47040861/88820155 1.题目要求 商品管理系统 商品信息包括:包括编号、类别、名称、价格、折扣比例、生产时间 、存货数量等要求:1、信息首先保存在文件中,然后打开文件进行…...
单片机学习笔记---串口通信(2)
目录 串口内部结构 串口相关寄存器 串口控制寄存器SCON SM0和SM1 SM2 REN TB8和RB8 TI和RI 电源控制寄存器PCON SMOD 串口工作方式 方式0 方式0输出: 方式0输入 方式1 方式1输出。 方式1输入 方式2和方式3 方式2和方式3输出: 方式2和…...

【Java】乐观锁有哪些常见实现方式?
Java中的乐观锁主要有两种常见的实现方式: CAS(Compare and Swap):这是实现乐观锁的核心算法。CAS操作包含三个参数:内存地址V、旧的预期值A和要修改的新值B。执行CAS操作时,会先比较内存地址V中的值是否等…...
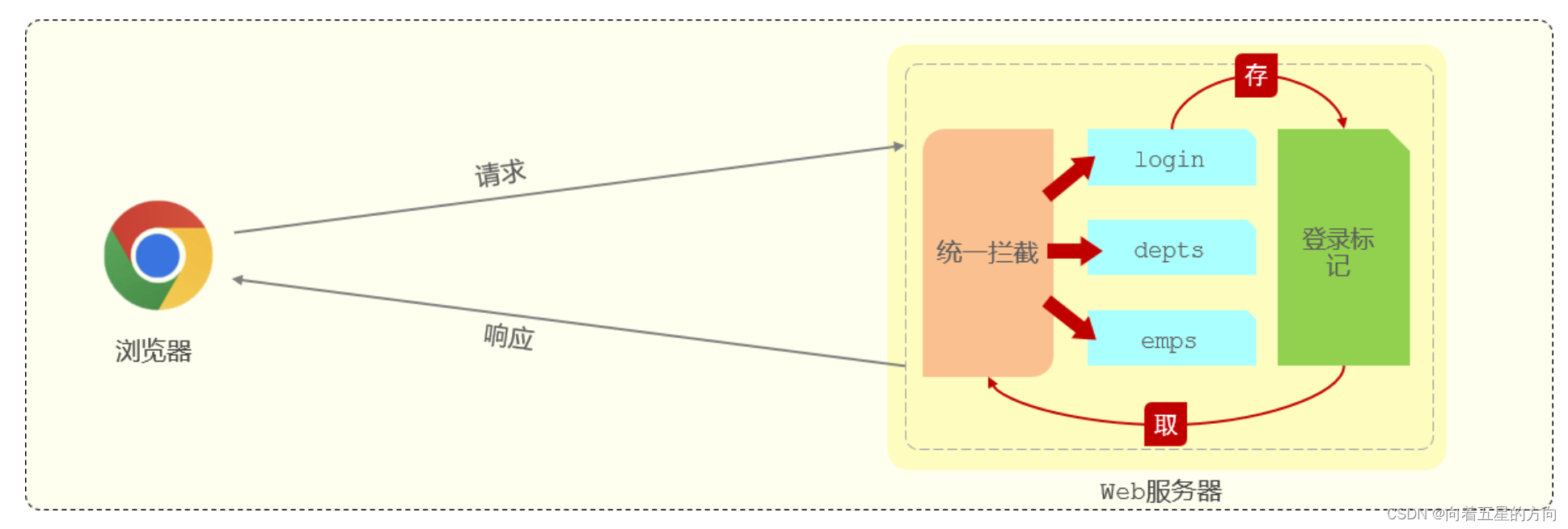
Javaweb之SpringBootWeb案例之登录校验功能的详细解析
2. 登录校验 2.1 问题分析 我们已经完成了基础登录功能的开发与测试,在我们登录成功后就可以进入到后台管理系统中进行数据的操作。 但是当我们在浏览器中新的页面上输入地址:http://localhost:9528/#/system/dept,发现没有登录仍然可以进…...

CSS之盒模型
盒模型概念 浏览器盒模型(Box Model)是CSS中的基本概念,它描述了元素在布局过程中如何占据空间。盒模型由内容(content)、内边距(padding)、边框(border)、和外边距&…...
博客系统-SpringBoot版本
相比于之前使用Servlet来完成的博客系统,SpringBoot版本的博客系统功能更完善,使用到的技术更接近企业级,快来看看吧~ 目录 1.项目介绍 2.数据库准备 3.实体化类 4.返回格式 5.登录和注册功能 6.登出(注销)功能…...
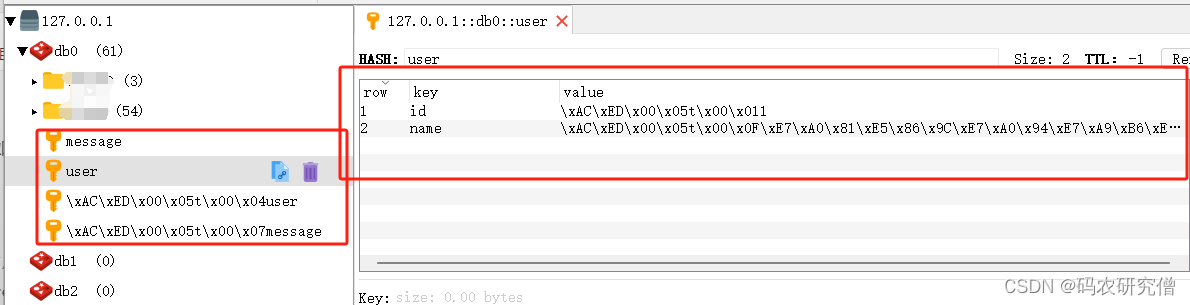
详细分析Redis中数值乱码的根本原因以及解决方式
目录 前言1. 问题所示2. 原理分析3. 拓展 前言 对于这方面的相关知识推荐阅读: Redis框架从入门到学精(全)Java关于RedisTemplate的使用分析 附代码java框架 零基础从入门到精通的学习路线 附开源项目面经等(超全) …...

网络专栏目录
大家好我是苏麟 , 这是网络专栏目录 . 图解网络 资料来源 : 小林coding 小林官方网站 : 小林coding (xiaolincoding.com) 图解网络目录 基础篇 基础篇 TCP/IP网络模型有几层? : TCP/IP网络模型 键入网址到页面显示,期间发生了什么? : 键入网址到页面显示,期间发生了什么 现阶…...
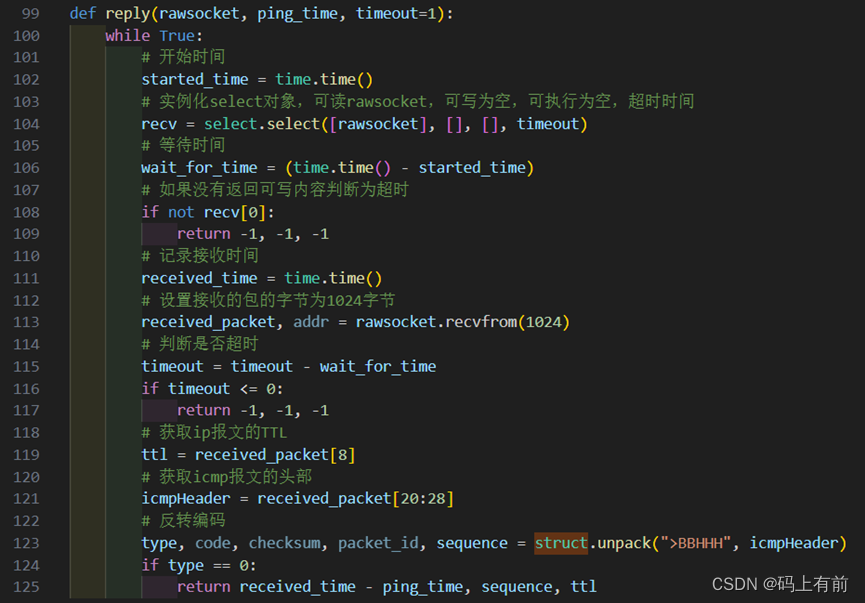
【Python网络编程之Ping命令的实现】
🚀 作者 :“码上有前” 🚀 文章简介 :Python开发技术 🚀 欢迎小伙伴们 点赞👍、收藏⭐、留言💬 Python网络编程之Ping命令的实现 代码见资源,效果图如下一、实验要求二、协议原理2…...

OpenHarmony轻量级驱动开发
OpenHarmony轻量级驱动开发 思维导图: https://download.csdn.net/download/lanlingxueyu/88817155 GPlO(General-purpose input/output)即通用型输入输出 描述 GPlO(General-purpose input/output)即通用型输入输出。通俗地说,GPlO口就是一些引脚可以通过它们输出高低…...

C语言如何输⼊字符数组?
一、问题 在程序中,scanf()函数可以输⼊任意类型的数据,gets()函数只能输⼊字符串等,但是如何更好地输⼊字符数组呢? 二、解答 我们知道如何使⽤格式输⼊函数 scanf(),那么可以使⽤%c 格式符逐个输⼊字符。这样输⼊有…...
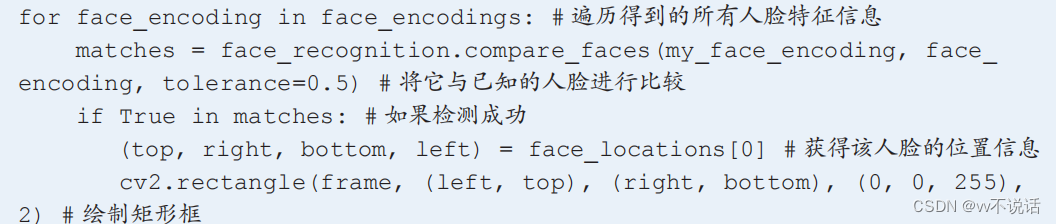
人脸追踪案例及机器学习认识
1.人脸追踪机器人初制 用程序控制舵机运动的方法与机械臂项目完全相同。 由于摄像头的安装方式为上下倒转安装,我们在编写程序读取图像时需使用 flip 函数将 图像上下翻转。 现在,只需要使用哈尔特征检测得到人脸在图像中的位置,再指示舵机运…...
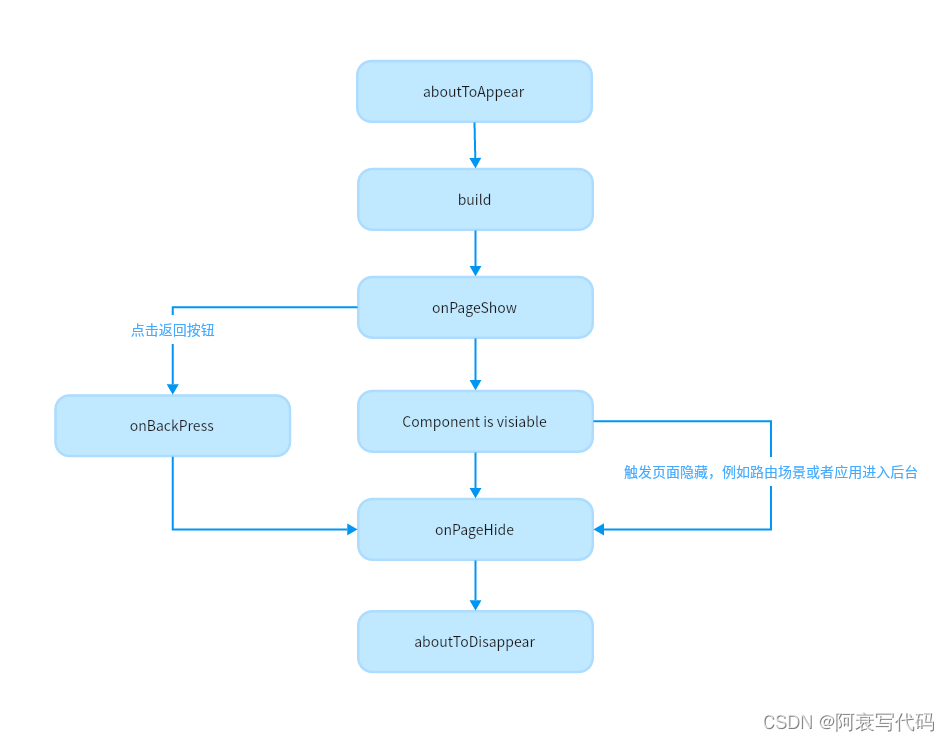
鸿蒙开发理论之页面和自定义组件生命周期
1、自定义组件和页面的关系 页面:即应用的UI页面。可以由一个或者多个自定义组件组成,Entry装饰的自定义组件为页面的入口组件,即页面的根节点,一个页面有且仅能有一个Entry。只有被Entry装饰的组件才可以调用页面的生命周期。自…...

docker-compose部署gitlab和jenkins
通过docker-compose部署gitlab和jenkins,方便后续工作 注意: gitlab占用资源较多,最好系统内存在8G以上,CPU4核心以上,否则gitlab有可能报错无法启动。docker版本用最新版本,低版本的docker可能会导致doc…...

Pytorch 复习总结 1
Pytorch 复习总结,仅供笔者使用,参考教材: 《动手学深度学习》 本文主要内容为:Pytorch 张量的常见运算、线性代数、高等数学、概率论。 Pytorch 张量的常见运算、线性代数、高等数学、概率论 部分 见 Pytorch 复习总结 1&…...
)
谷歌免费开放模糊测试框架OSS-Fuzz(物联网、车联网、供应链安全、C/C++)
目录 模糊测试的智能化和自动化 模糊测试不能代替安全设计原则 AI驱动的漏洞修补...
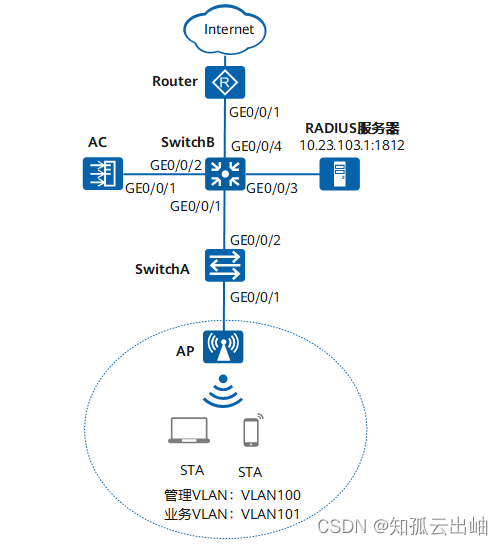
华为配置内部人员接入WLAN网络示例(802.1X认证)
配置内部人员接入WLAN网络示例(802.1X认证) 组网图形 图1 配置802.1X认证组网图 业务需求组网需求数据规划配置思路配置注意事项操作步骤配置文件 业务需求 用户接入WLAN网络,使用802.1X客户端进行认证,输入正确的用户名和密…...
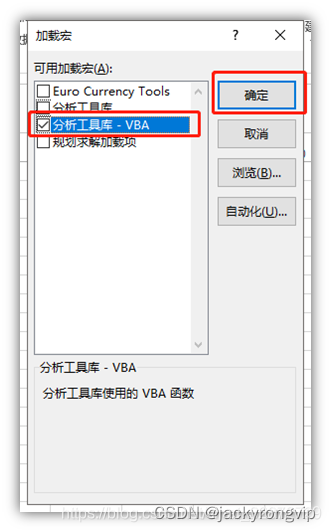
EXCEL中如何调出“数据分析”的菜单
今天发现,原来WPS还是和EXCEL比,还是少了“数据分析”这个日常基本做统计的菜单,只好用EXCEL了,但奇怪发现我的EXCEL中没发现这个菜单,然后查了下,才发现,要用如下的方法打开: 1&…...

基于Qt的人脸识别项目(功能:颜值检测,口罩检测,表情检测,性别检测,年龄预测等)
完整代码链接在文章末尾 效果展示 代码讲解(待更新) qt图片文件上传 #include <QtWidgets> #include <QFileDialog>...

哔哩下载姬:构建专业视频备份方案的开源工具详解
哔哩下载姬:构建专业视频备份方案的开源工具详解 【免费下载链接】downkyi 哔哩下载姬downkyi,哔哩哔哩网站视频下载工具,支持批量下载,支持8K、HDR、杜比视界,提供工具箱(音视频提取、去水印等)…...

5个高效技巧:用LaTeX Beamer制作学术演示的专业呈现
5个高效技巧:用LaTeX Beamer制作学术演示的专业呈现 【免费下载链接】Latex-Beamer-Template 中文学术LaTeX Beamer模板 项目地址: https://gitcode.com/gh_mirrors/la/Latex-Beamer-Template 在学术汇报中,演示文稿的质量直接影响研究成果的传达…...

python某炼油厂巡检盲板管理系统vue3
目录技术栈选择系统架构设计核心功能模块关键技术实现数据可视化部署方案测试计划开发里程碑项目技术支持源码获取详细视频演示 :文章底部获取博主联系方式!同行可合作技术栈选择 后端采用Python的Django或FastAPI框架,处理数据存储、业务逻…...

易语言数据库操作进阶:参数化查询、事务处理与通用组件封装
易语言数据库操作进阶:参数化查询、事务处理与通用组件封装一、学习目标与重点 💡学习目标:1. 理解SQL注入的危害与参数化查询的原理;2. 掌握内置Ado引擎与SQLite3的参数化查询方法(防止SQL注入)࿱…...

腾视科技重磅推出TensorAI智能体平台,开启智能助手新体验
在人工智能技术飞速发展的当下,浙江腾视算擎科技有限公司(以下简称:腾视科技TENSORTEC)凭借深厚的技术积累与创新思维,正式推出腾视科技TensorAI类“豆包”应用平台(AI智能体平台),为…...

5:L对抗深度学习模型:蓝队的模型防御策略
作者: HOS(安全风信子) 日期: 2026-03-17 主要来源平台: arXiv 摘要: 作为数字世界的守护者,我深入研究深度学习模型的安全漏洞,构建针对AI攻击的防御体系。本文拆解了2026年深度学习模型的安全威胁与防御策…...

揭秘MCP Sampling接口RT飙升300%的真相:从gRPC拦截器到异步缓冲的7层调用链深度剖析
第一章:MCP Sampling接口性能问题的全景认知MCP(Model Control Protocol)Sampling接口是现代AI服务中承担实时采样请求调度与响应的核心通道,其性能表现直接影响端到端推理延迟、吞吐稳定性及资源利用率。当采样请求量突增或模型配…...
)
K8s节点死活加不进来?别急着重装,先检查这几个残留文件和端口(附一键清理脚本)
K8s节点加入失败的深度排障指南:从残留文件到端口占用的系统化解决方案 遇到Kubernetes节点死活加不进集群的情况,很多运维工程师的第一反应是重装系统——这就像用核弹解决蚊子问题,既低效又破坏性极强。实际上,90%的节点加入失败…...

若依微服务框架中PDF文件上传与预览的实战配置与避坑指南
1. 环境准备与基础配置 在若依微服务框架中实现PDF上传预览功能,首先要确保开发环境正确配置。我遇到过不少开发者因为基础环境没配好,导致后续功能开发频频报错的情况。这里分享几个关键检查点: 开发工具选择:推荐使用IntelliJ I…...

Mac NTFS读写技术解析:从原理到实战的全流程指南
Mac NTFS读写技术解析:从原理到实战的全流程指南 【免费下载链接】Free-NTFS-for-Mac Nigate,一款支持苹果芯片的Free NTFS for Mac小工具软件。NTFS R/W for macOS. Support Intel/Apple Silicon now. 项目地址: https://gitcode.com/gh_mirrors/fr/F…...