STM32CubeMX学习笔记14 ---SPI总线
1. 简介
1.1 SPI总线介绍
SPI 是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。是Motorola(摩托罗拉)首先在其MC68HCXX系列处理器上定义的。
SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,主要应用在 EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。
SPI主从模式
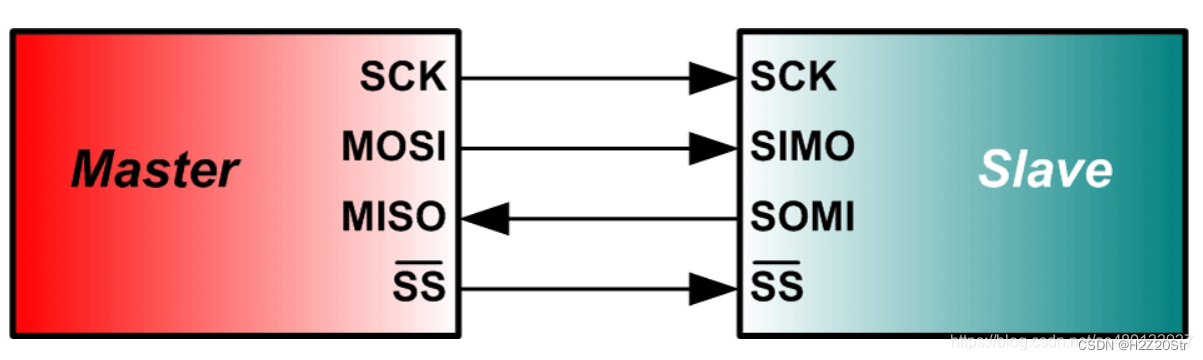
SPI分为主、从两种模式,一个SPI通讯系统需要包含一个(且只能是一个)主设备,一个或多个从设备。提供时钟的为主设备(Master),接收时钟的设备为从设备(Slave),SPI接口的读写操作,都是由主设备发起。当存在多个从设备时,通过各自的片选信号进行管理。
SPI是全双工且SPI没有定义速度限制,一般的实现通常能达到甚至超过10 Mbps
SPI信号线
SPI接口一般使用四条信号线通信:
SDI(数据输入),SDO(数据输出),SCK(时钟),CS(片选)
- MISO: 主设备输入/从设备输出引脚。该引脚在从模式下发送数据,在主模式下接收数据。
- MOSI: 主设备输出/从设备输入引脚。该引脚在主模式下发送数据,在从模式下接收数据。
- SCLK:串行时钟信号,由主设备产生。
- CS/SS:从设备片选信号,由主设备控制。它的功能是用来作为“片选引脚”,也就是选择指定的从设备,让主设备可以单独地与特定从设备通讯,避免数据线上的冲突。
硬件上为4根线。
SPI一对一
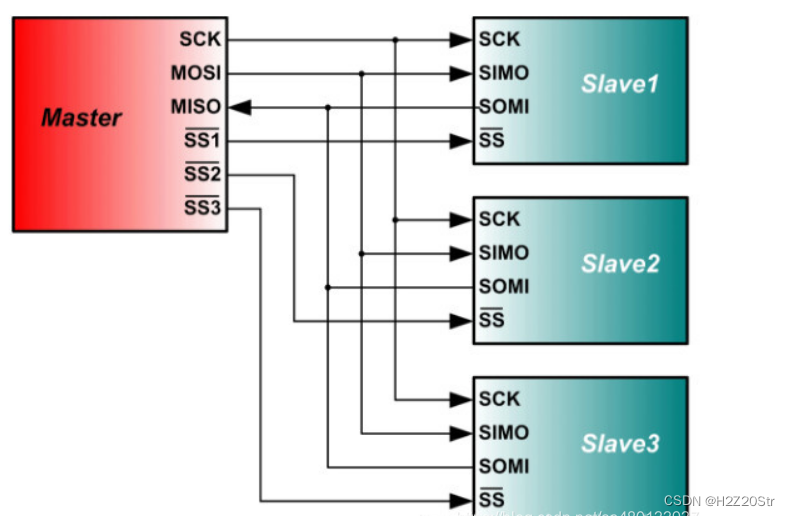
SPI一对多
SPI数据发送接收
SPI主机和从机都有一个串行移位寄存器,主机通过向它的SPI串行寄存器写入一个字节来发起一次传输。
首先拉低对应SS信号线,表示与该设备进行通信
主机通过发送SCLK时钟信号,来告诉从机写数据或者读数据
这里要注意,SCLK时钟信号可能是低电平有效,也可能是高电平有效,因为SPI有四种模式,这个我们在下面会介绍
主机(Master)将要发送的数据写到发送数据缓存区(Menory),缓存区经过移位寄存器(0~7),串行移位寄存器通过MOSI信号线将字节一位一位的移出去传送给从机,,同时MISO接口接收到的数据经过移位寄存器一位一位的移到接收缓存区。
从机(Slave)也将自己的串行移位寄存器(0~7)中的内容通过MISO信号线返回给主机。同时通过MOSI信号线接收主机发送的数据,这样,两个移位寄存器中的内容就被交换。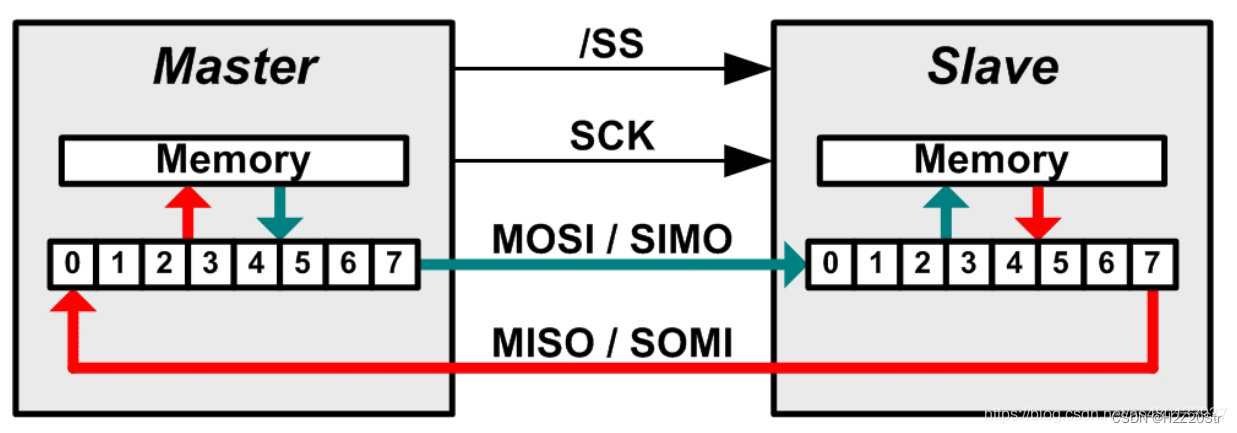
SPI只有主模式和从模式之分,没有读和写的说法,外设的写操作和读操作是同步完成的。如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。也就是说,你发一个数据必然会收到一个数据;你要收一个数据必须也要先发一个数据。
SPI工作模式
根据时钟极性(CPOL)及相位(CPHA)不同,SPI有四种工作模式。
时钟极性(CPOL)定义了时钟空闲状态电平:
- CPOL=0为时钟空闲时为低电平
- CPOL=1为时钟空闲时为高电平
时钟相位(CPHA)定义数据的采集时间。
- CPHA=0:在时钟的第一个跳变沿(上升沿或下降沿)进行数据采样。
- CPHA=1:在时钟的第二个跳变沿(上升沿或下降沿)进行数据采样。

1.2 W25QXX芯片介绍
W25QXX芯片是华邦公司推出的大容量SPI FLASH产品,该系列有W25Q16/32/62/128等。本例程使用W25Q64,W25Q64容量为64Mbits(8M字节):8MB的容量分为128个块(Block)(块大小为64KB),每个块又分为16个扇区(Sector)(扇区大小为4KB);W25Q64的最小擦除单位为一个扇区即4KB,因此在选择芯片的时候必须要有4K以上的SRAM(可以开辟4K的缓冲区)。W25Q64的擦写周期多达10万次,具有20年的数据保存期限。 下表是W25QXX的常用命令表

常用指令:
写使能(Write Enable) (06h)
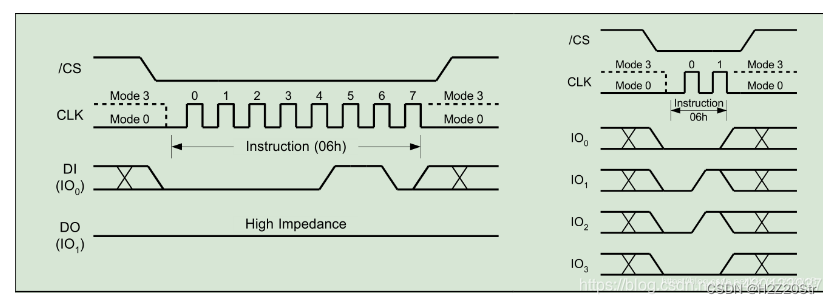
向FLASH发送0x06 写使能命令即可开启写使能,首先CS片选拉低,控制写入字节函数写入命令,CS片选拉高。
扇区擦除指令(Sector Erase) (0x20h)
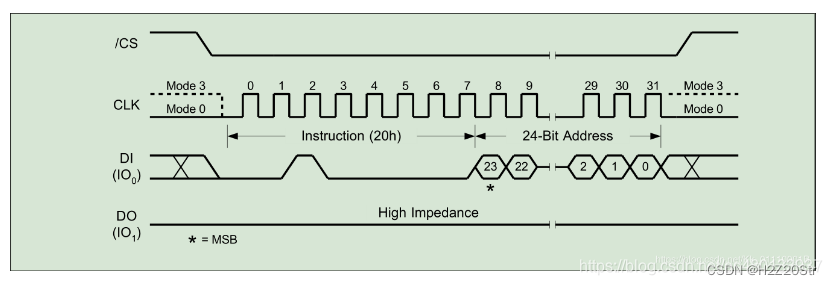
扇区擦除指令,数据写入前必须擦除对应的存储单元,该指令先拉低/CS引脚电平,接着传输“20H”指令和要24位要擦除扇区的地址。
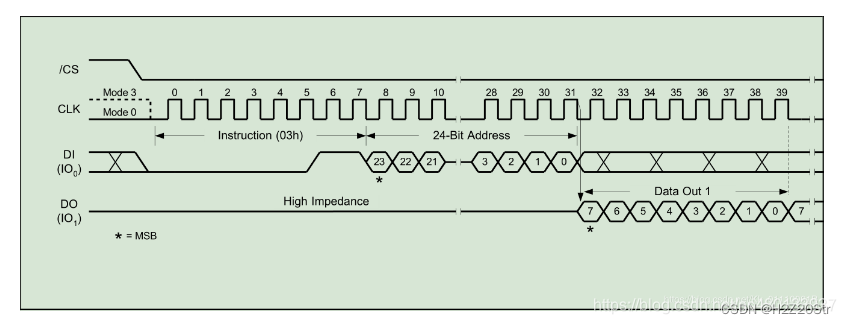
读命令(Read Data) (03h)
读数据指令可从存储器依次一个或多个数据字节,该指令通过主器件拉低/CS电平使能设备开始传输,然后传输“03H”指令,接着通过DI管脚传输24位地址,从器件接到地址后,寻址存储器中的数据通过DO引脚输出。每传输一个字节地址自动递增,所以只要时钟继续传输,可以不断读取存储器中的数据。
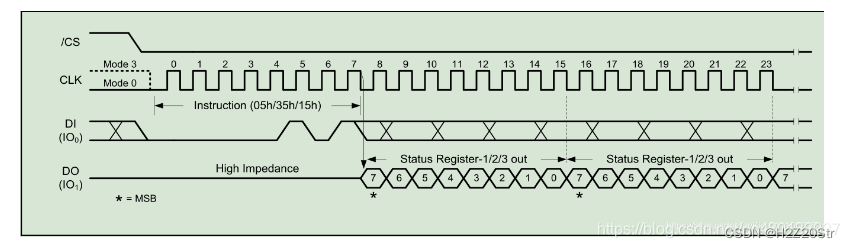
状态读取命令(Read Status Register)
读状态寄存器1(05H),状态寄存器2(35H),状态寄存器3(15H)
写入命令0x05,即可读取状态寄存器的值。
写入命令(Page Program) (02h)
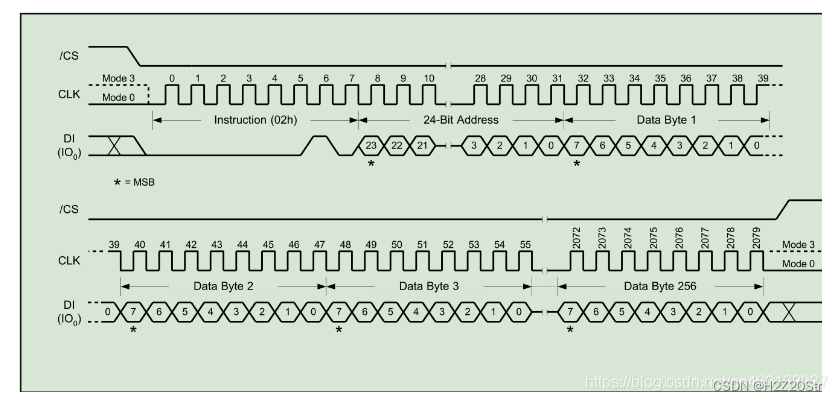
在对W25Q128 FLASH的写入数据的操作中一定要先擦出扇区,在进行写入,否则将会发生数据错误。
W25Q128 FLASH一次性最大写入只有256个字节。
在进行写操作之前,一定要开启写使能(Write Enable)。
当只接收数据时不但能只检测RXNE状态 ,必须同时向发送缓冲区发送数据才能驱动SCK时钟跳变。
2. 硬件设计
LED2指示灯用来提示系统运行状态,S1按键用来控制W25Q64数据写入,S2按键用来控制W25Q64数据读取,串口1用来打印写入和读取的数据信息
- LED2指示灯
-
S1和S2按键
- USART1
- SPI
- W25Q64

3、STM32CubeMX设置
- RCC设置外接HSE,时钟设置为72M
- PE5(LED2)设置为GPIO推挽输出模式、上拉、高速、默认输出电平为高电平
- USART1选择为异步通讯方式,波特率设置为115200Bits/s,传输数据长度为8Bit,无奇偶校验,1位停止位
- PE3,PE4设置为GPIO输入模式、上拉模式
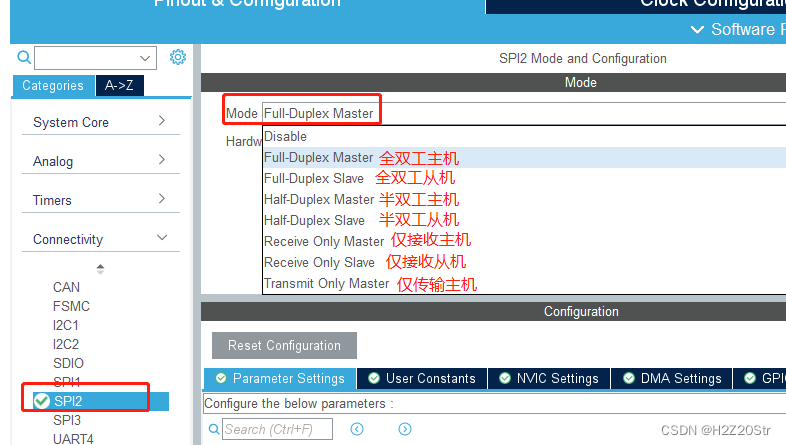
- 激活SPI2,选择全双工主机模式
不使能硬件NSS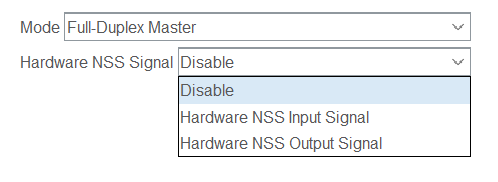
STM32有硬件NSS(片选信号),可以选择使能,也可以使用其他IO口接到芯片的NSS上进行代替
其中SIP2的片选NSS : SPI2_NSS(PB12)
如果片选引脚没有连接 SPI1_NSS(PA4)或者SPI2_NSS(PB12),则需要选择软件片选
NSS管脚及我们熟知的片选信号,作为主设备NSS管脚为高电平,从设备NSS管脚为低电平。当NSS管脚为低电平时,该spi设备被选中,可以和主设备进行通信。在stm32中,每个spi控制器的NSS信号引脚都具有两种功能,即输入和输出。所谓的输入就是NSS管脚的信号给自己。所谓的输出就是将NSS的信号送出去,给从机。
对于NSS的输入,又分为软件输入和硬件输入。
软件输入:
NSS分为内部管脚和外部管脚,通过设置spi_cr1寄存器的ssm位和ssi位都为1可以设置NSS管脚为软件输入模式且内部管脚提供的电平为高电平,其中SSM位为使能软件输入位。SSI位为设置内部管脚电平位。同理通过设置SSM和SSI位1和0则此时的NSS管脚为软件输入模式但内部管脚提供的电平为0。若从设备是一个其他的带有spi接口的芯片,并不能选择NSS管脚的方式,则可以有两种办法,一种是将NSS管脚直接接低电平。另一种就是通过主设备的任何一个gpio口去输出低电平选中从设备。
硬件输入:
主机接高电平,从机接低电平。
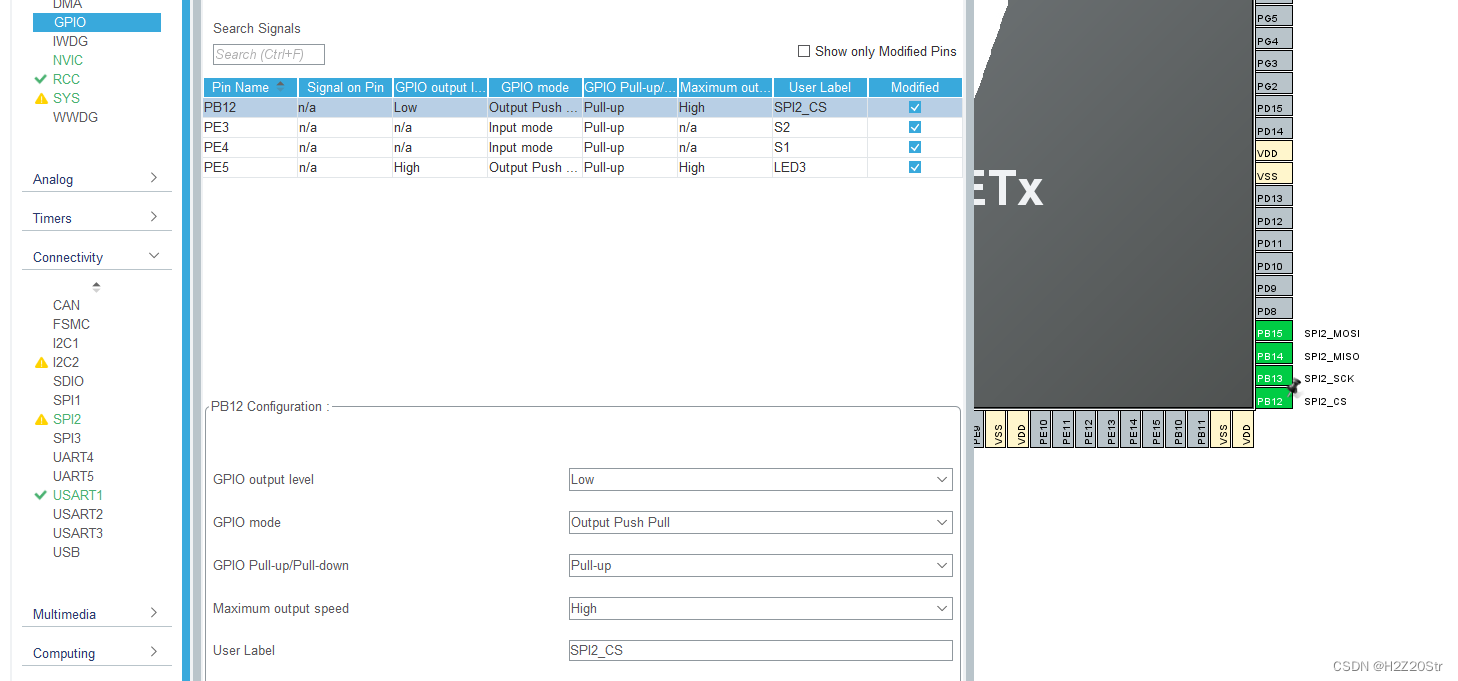
左键对应的软件片选引脚,选择GPIO_Output(输出模式),然后点击GPIO,设置一下备注。
我这里虽然PB12是SPI2的硬件片选NSS,但是我想用软件片选,所以关闭了硬件NSS
PB12设置为GPIO推挽输出模式、上拉、高速(片选引脚)
SPI配置默认如下:
SPI配置中设置格式为Motorla格式,数据长度为8bit,MSB先输出。
分频为256分频,则波特率为140KBits/s,CPOL设置为HIGH,CPHA设置为第二个边沿。
不开启CRC检验,NSS为软件控制。
其他为默认设置。

- 输入工程名,选择工程路径(不要有中文),选择MDK-ARM V5;勾选Generated periphera initialization as a pair of ‘.c/.h’ files per IP ;点击GENERATE CODE,生成工程代码
4、程序编程
在stm32f1xx_hal_spi.h头文件中可以看到spi的操作函数。分别对应轮询,中断和DMA三种控制方式。
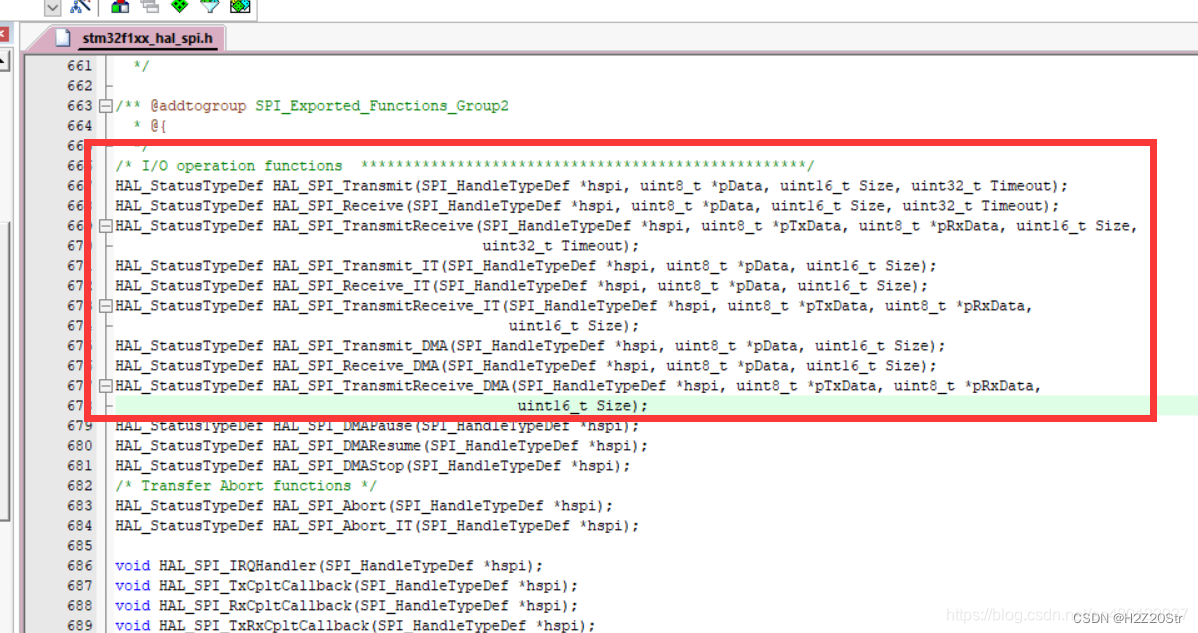
- 轮询: 最基本的发送接收函数,就是正常的发送数据和接收数据
- 中断: 在SPI发送或者接收完成的时候,会进入SPI回调函数,用户可以编写回调函数,实现设定功能
- DMA: DMA传输SPI数据
利用SPI接口发送和接收数据主要调用以下两个函数:
HAL_StatusTypeDef HAL_SPI_Transmit(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout);//发送数据
/*
*hspi: 选择SPI1/2,比如&hspi1,&hspi2
*pData : 需要发送的数据,可以为数组
Size: 发送数据的字节数,1 就是发送一个字节数据
Timeout: 超时时间,就是执行发送函数最长的时间,超过该时间自动退出发送函数
*/
HAL_StatusTypeDef HAL_SPI_Receive(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout);//接收数据
/*
*hspi: 选择SPI1/2,比如&hspi1,&hspi2
*pData : 接收发送过来的数据的数组
Size: 接收数据的字节数,1 就是接收一个字节数据
Timeout: 超时时间,就是执行接收函数最长的时间,超过该时间自动退出接收函数
*/
SPI接收回调函数:
HAL_SPI_TransmitReceive_IT(&hspi1, TXbuf,RXbuf,CommSize);当SPI上接收出现了 CommSize个字节的数据后,中断函数会调用SPI回调函数:
HAL_SPI_TxRxCpltCallback(SPI_HandleTypeDef *hspi)用户可以重新定义回调函数,编写预定功能即可,在接收完成之后便会进入回调函数
- 在spi.c文件下可以看到SPI2的初始化函数,片选管脚的初始化在gpio.c中
void MX_SPI2_Init(void){hspi2.Instance = SPI2;hspi2.Init.Mode = SPI_MODE_MASTER; //设置为主模式hspi2.Init.Direction = SPI_DIRECTION_2LINES; //双线模式hspi2.Init.DataSize = SPI_DATASIZE_8BIT; // 8位数据长度hspi2.Init.CLKPolarity = SPI_POLARITY_HIGH; //串行同步时钟空闲状态为高电平hspi2.Init.CLKPhase = SPI_PHASE_2EDGE; //第二个跳变沿采样hspi2.Init.NSS = SPI_NSS_SOFT; //NSS软件控制hspi2.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_256; //分配因子256hspi2.Init.FirstBit = SPI_FIRSTBIT_MSB; //MSB先行hspi2.Init.TIMode = SPI_TIMODE_DISABLE; //关闭TI模式hspi2.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE; //关闭硬件CRC校验hspi2.Init.CRCPolynomial = 10;if (HAL_SPI_Init(&hspi2) != HAL_OK){Error_Handler();}
}void HAL_SPI_MspInit(SPI_HandleTypeDef* spiHandle){GPIO_InitTypeDef GPIO_InitStruct = {0};if(spiHandle->Instance==SPI2){__HAL_RCC_SPI2_CLK_ENABLE(); __HAL_RCC_GPIOB_CLK_ENABLE();/**SPI2 GPIO Configuration PB13 ------> SPI2_SCKPB14 ------> SPI2_MISOPB15 ------> SPI2_MOSI */GPIO_InitStruct.Pin = GPIO_PIN_13|GPIO_PIN_15;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);GPIO_InitStruct.Pin = GPIO_PIN_14;GPIO_InitStruct.Mode = GPIO_MODE_INPUT;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);}
}创建包含W25Q64芯片的相关操作函数及驱动函数的文件w25qxx.c和w25qxx.h
#ifndef _W25QXX_H_
#define _W25QXX_H_#include "main.h"
#include "spi.h"
#include "usart.h"#define W25Q64 0XC816extern uint16_t W25QXX_TYPE;
//修改CS片选引脚,W25Qx_Enable(),W25Qx_Disable()分别为使能和失能SPI设备,即拉低和拉高/CS电平
#define W25Qx_Enable() HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,GPIO_PIN_RESET)
#define W25Qx_Disable() HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,GPIO_PIN_SET)#define W25X_WriteEnable 0x06
#define W25X_WriteDisable 0x04
#define W25X_ReadStatusReg1 0x05
#define W25X_ReadStatusReg2 0x35
#define W25X_ReadStatusReg3 0x15
#define W25X_WriteStatusReg1 0x01
#define W25X_WriteStatusReg2 0x31
#define W25X_WriteStatusReg3 0x11
#define W25X_ReadData 0x03
#define W25X_FastReadData 0x0B
#define W25X_FastReadDual 0x3B
#define W25X_PageProgram 0x02
#define W25X_BlockErase 0xD8
#define W25X_SectorErase 0x20
#define W25X_ChipErase 0xC7
#define W25X_PowerDown 0xB9
#define W25X_ReleasePowerDown 0xAB
#define W25X_DeviceID 0xAB
#define W25X_ManufactDeviceID 0x90
#define W25X_JedecDeviceID 0x9F
#define W25X_Enable4ByteAddr 0xB7
#define W25X_Exit4ByteAddr 0xE9void W25QXX_Init(void);
uint16_t W25QXX_ReadID(void);
uint8_t W25QXX_ReadSR(uint8_t regno);
void W25QXX_Write_SR(uint8_t regno,uint8_t sr);
void W25QXX_Write_Enable(void);
void W25QXX_Write_Disable(void);
void W25QXX_Read(uint8_t* pBuffer,uint32_t ReadAddr,uint16_t NumByteToRead); void W25QXX_Write_Page(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite);
void W25QXX_Write_NoCheck(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite);
void W25QXX_Write(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite);void W25QXX_Erase_Chip(void);
void W25QXX_Erase_Sector(uint32_t Dst_Addr);
void W25QXX_Wait_Busy(void);
void W25QXX_PowerDown(void);
void W25QXX_WAKEUP(void); #endif
#include "w25qxx.h"
#include <stdio.h>uint16_t W25QXX_TYPE;void W25QXX_Init(void)
{W25Qx_Disable();//MX_SPI2_Init();W25QXX_TYPE = W25QXX_ReadID(); //读取芯片IDprintf1("FLASH ID:%X\r\n",W25QXX_TYPE);if(W25QXX_TYPE == 0xc816)printf1("FLASH TYPE:W25Q64\r\n");
}//读取芯片ID
uint16_t W25QXX_ReadID(void)
{uint16_t ID;uint8_t id[2]={0};uint8_t cmd[4] = {W25X_ManufactDeviceID,0x00,0x00,0x00};//读取ID命令 0x90 W25Qx_Enable();//芯片使能HAL_SPI_Transmit(&hspi2,cmd,4,1000);//spi发送读取ID命令,超时1000msHAL_SPI_Receive(&hspi2,id,2,1000); //spi读取ID存放在数组id中,超时1000msW25Qx_Disable(); //取消片选 ID = (((uint16_t)id[0])<<8)|id[1];return ID;
}//读取片区
uint8_t W25QXX_ReadSR(uint8_t regno)
{uint8_t byte=0,cmd=0;switch(regno){case 1:cmd = W25X_ReadStatusReg1;break;case 2:cmd = W25X_ReadStatusReg2;break;case 3:cmd = W25X_ReadStatusReg3;break;default:cmd = W25X_ReadStatusReg1;break;}W25Qx_Enable();HAL_SPI_Transmit(&hspi2,&cmd,1,1000);HAL_SPI_Receive(&hspi2,&byte,1,1000);W25Qx_Disable();return byte;
}//写片区
void W25QXX_Write_SR(uint8_t regno,uint8_t sr)
{uint8_t cmd=0;switch(regno){case 1:cmd = W25X_WriteStatusReg1;break;case 2:cmd = W25X_WriteStatusReg2;break;case 3:cmd = W25X_WriteStatusReg3;break;default:cmd = W25X_WriteStatusReg1;break;}W25Qx_Enable();HAL_SPI_Transmit(&hspi2,&cmd,1,1000);HAL_SPI_Receive(&hspi2,&sr,1,1000);W25Qx_Disable();
}//写使能
void W25QXX_Write_Enable(void)
{uint8_t cmd = W25X_WriteEnable; //写使能命令 0x06W25Qx_Enable();HAL_SPI_Transmit(&hspi2,&cmd,1,1000);W25Qx_Disable();
}void W25QXX_Write_Disable(void)
{uint8_t cmd = W25X_WriteDisable; //写失能命令 0x04W25Qx_Enable();HAL_SPI_Transmit(&hspi2,&cmd,1,1000);W25Qx_Disable();
}void W25QXX_Read(uint8_t* pBuffer,uint32_t ReadAddr,uint16_t NumByteToRead)
{uint8_t cmd[4] = {0};cmd[0] = W25X_ReadData; //读取命令cmd[1] = ((uint8_t)(ReadAddr>>16));cmd[2] = ((uint8_t)(ReadAddr>>8));cmd[3] = ((uint8_t)ReadAddr);W25Qx_Enable();HAL_SPI_Transmit(&hspi2,cmd,4,1000);if(HAL_SPI_Receive(&hspi2,pBuffer,NumByteToRead,1000) != HAL_OK){printf1("SPI read failed!\r\n");}W25Qx_Disable();
}void W25QXX_Write_Page(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite)
{uint8_t cmd[4] = {0};if(NumByteToWrite > 256){NumByteToWrite = 256;printf1("写数据量过大,超过一页的大小!\n");}W25QXX_Write_Enable();W25Qx_Enable();cmd[0] = W25X_PageProgram;cmd[1] = ((uint8_t)(WriteAddr>>16));cmd[2] = ((uint8_t)(WriteAddr>>8));cmd[3] = ((uint8_t)WriteAddr);HAL_SPI_Transmit(&hspi2,cmd,4,1000);HAL_SPI_Transmit(&hspi2,pBuffer,NumByteToWrite,1000);W25Qx_Disable();W25QXX_Wait_Busy();
}void W25QXX_Write_NoCheck(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite)
{uint16_t pageremain;pageremain = 256 - WriteAddr%256;if(NumByteToWrite <= pageremain)pageremain = NumByteToWrite;while(1){W25QXX_Write_Page(pBuffer,WriteAddr,pageremain);if(NumByteToWrite == pageremain)break;else{pBuffer += pageremain;WriteAddr += pageremain;NumByteToWrite -= pageremain;if(NumByteToWrite > 256)pageremain = 256;elsepageremain = NumByteToWrite;}}
}uint8_t W25QXX_BUFFER[4096]={0};
void W25QXX_Write(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite)
{uint32_t secpos;uint16_t secoff;uint16_t secremain;uint16_t i;uint8_t *W25QXX_BUF;W25QXX_BUF = W25QXX_BUFFER;secpos = WriteAddr/4096; //扇区地址secoff = WriteAddr%4096; //在扇区里的偏移secremain = 4096-secoff; //扇区剩余空间大小printf1("WriteAddr:0x%X,NumByteToWrite:%d\r\n",WriteAddr,NumByteToWrite);if(NumByteToWrite <= secremain) //不大于4K字节secremain = NumByteToWrite;while(1){W25QXX_Read(W25QXX_BUF,secpos*4096,4096); //读取整个扇区内容for(i=0;i<secremain;i++) //校验数据 {if(W25QXX_BUF[secoff+i] != 0xff) //需要擦除break;}if(i < secremain) //需要擦除{W25QXX_Erase_Sector(secpos); //擦除扇区for(i=0;i<secremain;i++){printf1("4\r\n");W25QXX_BUF[i+secoff] = pBuffer[i];}W25QXX_Write_NoCheck(W25QXX_BUF,secpos*4096,4096); //写入整个扇区}else{W25QXX_Write_NoCheck(pBuffer,WriteAddr,secremain); //写入扇区剩余空间}if(NumByteToWrite == secremain) //写入结束了break;else //写入未结束{secpos++; //扇区地址增1secoff = 0; //偏移位置为0 pBuffer += secremain; //指针偏移WriteAddr += secremain; //写地址偏移NumByteToWrite -= secremain; //字节数递减if(NumByteToWrite > 4096)secremain = 4096; //下个扇区还没是写不完elsesecremain = NumByteToWrite; //下个扇区可以写完了}}
}void W25QXX_Erase_Chip(void)
{uint8_t cmd = W25X_ChipErase;W25QXX_Write_Enable();W25QXX_Wait_Busy();W25Qx_Enable();HAL_SPI_Transmit(&hspi2,&cmd,1,1000);W25Qx_Disable();W25QXX_Wait_Busy();
}//擦除扇区
void W25QXX_Erase_Sector(uint32_t Dst_Addr)
{uint8_t cmd[4] = {0};Dst_Addr *= 4096;W25QXX_Write_Enable();//写使能W25QXX_Wait_Busy();W25Qx_Enable();cmd[0] = W25X_SectorErase;cmd[1] = ((uint8_t)(Dst_Addr>>16));cmd[2] = ((uint8_t)(Dst_Addr>>8));cmd[3] = ((uint8_t)Dst_Addr);HAL_SPI_Transmit(&hspi2,cmd,4,1000);W25Qx_Disable();W25QXX_Wait_Busy();
}void W25QXX_Wait_Busy(void)
{while((W25QXX_ReadSR(1)&0x01)==0x01);
}void W25QXX_PowerDown(void)
{uint8_t cmd = W25X_PowerDown;W25Qx_Enable();HAL_SPI_Transmit(&hspi2,&cmd,1,1000);W25Qx_Disable();HAL_Delay(1);
}void W25QXX_WAKEUP(void)
{uint8_t cmd = W25X_ReleasePowerDown;W25Qx_Enable();HAL_SPI_Transmit(&hspi2,&cmd,1,1000);W25Qx_Disable();HAL_Delay(1);
}
- 在main.c文件下编写SPI测试代码
uint8_t wData[0x100];
uint8_t rData[0x100];
uint32_t i;
unsigned char tx_buf[256];int main(void)
{
uint8_t key;W25QXX_Init();for(i=0;i<0x100;i++){wData[i] = 0xff-i;rData[i] = 0;} while (1){key = KEY_Scan(0);if(key == 1){printf1("S1 write data...\r\n");W25QXX_Erase_Sector(0);//擦除扇区W25QXX_Write(wData,0,256);printf1("S1 write data success\r\n");}if(key == 2){printf1("S2 read data...\r\n");W25QXX_Read(rData,0,256);for(i=0;i<256;i++){printf1("0x%02X ",rData[i]);}}HAL_GPIO_TogglePin(GPIOE,GPIO_PIN_5);HAL_Delay(500);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
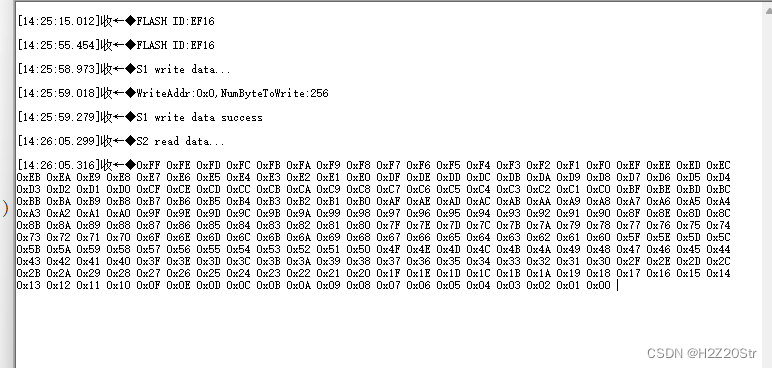
}5、下载验证
编译无误下载到开发板后,可以看到LED2指示灯不断闪烁,当按下S1按键后数据写入到W25Q64芯片内,当按下S2按键后读取W25Q64芯片的值,同时串口打印出相应信息
相关文章:
STM32CubeMX学习笔记14 ---SPI总线
1. 简介 1.1 SPI总线介绍 SPI 是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。是Motorola(摩托罗拉)首先在其MC68HCXX系列处理器上定义的。 SPI,是一种高速的,全双工,同步的通信总线,并且在…...
)
Gson(List<Object>转String 、String转List<Object>)
要在Java项目中使用Gson库,你需要添加相应的依赖项。以下是在Maven项目的pom.xml文件中添加Gson依赖的示例: <dependencies><dependency><groupId>com.google.code.gson</groupId><artifactId>gson</artifactId>&l…...

uniapp路由跳转的方式
1. uniapp路由跳转的方式 1.1. uni.navigateTo保留当前页面,跳转到应用内的某个页面,使用uni.navigateBack可以返回到原页面。 uni.navigateTo({url:./index/index });注意: (1)页面跳转路径有层级限制,不…...

使用Python模拟绘制自由落体运动过程中的抛物线
目录 一、引言 二、自由落体运动的基本原理 三、使用Python模拟自由落体运动 四、扩展功能:添加速度曲线和动画效果 五、总结与展望 一、引言 自由落体运动是物理学中最基础的运动形式之一,它描述了一个物体在仅受重力作用下的运动轨迹。在这个…...

批量爬取网站图片脚本
不分文件夹 import requests from bs4 import BeautifulSoup import os from concurrent.futures import ThreadPoolExecutordef download_image(img_url):# 检查图片后缀是否为.jpg或.jpegif img_url.lower().endswith((.jpg, .jpeg)):try:img_response requests.get(img_ur…...

scrapy 爬虫:多线程爬取去微博热搜排行榜数据信息,进入详情页面拿取第一条微博信息,保存到本地text文件、保存到excel
如果想要保存到excel中可以看我的这个爬虫 使用Scrapy 框架开启多进程爬取贝壳网数据保存到excel文件中,包括分页数据、详情页数据,新手保护期快来看!!仅供学习参考,别乱搞_爬取贝壳成交数据c端用户登录-CSDN博客 最终…...

网络、UDP编程
1.网络协议模型: OSI协议模型 应用层 实际发送的数据 表示层 发送的数据是否加密 会话层 是否建立会话连接 传输层 数据传输的方式(数据报、流式) 网络层 …...
VSCode安装与使用
1、下载地址:Documentation for Visual Studio Code 在 VS Code 中使用 Python - 知乎 (zhihu.com) 自动补全和智能感知检测、调试和单元测试在Python环境(包括虚拟环境和 conda 环境)之间轻松切换 在 VS Code 中安装插件非常的简单,只需要打开 VS Code…...

进程和线程的区别与联系
进程和线程是计算机系统中两个重要的概念,它们在操作系统中扮演着不同的角色,并有着不同的特点和用途。以下是详细信息: 进程。进程是操作系统中资源分配的基本单位,它包括程序、数据和进程控制块。每个进程都有自己的地址空间&a…...

6、Redis-KV设计、全局命令和安全性
目录 一、value设计 二、Key设计 三、全局命令——针对所有key 四、安全性 一、value设计 ①是否需要排序?需要:Zset ②需要缓存的数据是单个值还是多个值? 单个值:简单值---String;对象值---Hash多个值&#x…...
python之海龟绘图
海龟绘图(turtle)是一个Python内置的绘图库,也被称为“Turtle Graphics”或简称“Turtles”。它采用了一种有趣的绘图方式,模拟一只小海龟在屏幕上爬行,而小海龟爬行的路径就形成了绘制的图形。这种绘图方式最初源自20…...

Java实战:Spring Boot 实现异步记录复杂日志
日志记录是软件开发中非常重要的一环,它可以帮助我们快速定位问题、监控程序运行状态等。在 Spring Boot 应用中,异步记录日志是一种常见的需求。本文将详细介绍如何在 Spring Boot 中实现异步记录复杂日志,包括异步日志的基本原理、实现方式…...

“色狼”用英语怎么说?柯桥日常英语,成人英语口语学习
最近有粉丝问我"色狼"英文翻译是啥 首先声明不是"colour wolf"哈 关于“色狼”的英文表达有很多 快和C姐一起来看看吧! 1.pervert 这个单词的意思是变态、色狼 是对性变态者最直观的描述 He is such a pervert! I saw him lo…...
Docker前后端项目部署
目录 一、搭建项目部署的局域网 二、redis安装 三、MySQL安装 四、若依后端项目搭建 4.1 使用Dockerfile自定义镜像 五、若依前端项目搭建 一、介绍前后端项目 一张图带你看懂ruoyi的前后端项目部署 得出结论:需要4台服务器,都处于同一个局域网中…...

如何快速的搭建一个小程序
要快速搭建一个小程序,你可以按照以下步骤进行: 明确目标和需求:在开始搭建小程序之前,首先明确你的小程序的主要功能、目标用户以及希望实现的业务需求。这将帮助你更好地规划和设计小程序。选择小程序平台:根据你的…...

STM32自学☞AD多通道
涉及到的硬件有:光敏传感器,热敏传感器,红外对射传感器,电位器 通过adc将他们采集的模拟信号转换为数值 ad.c文件 #include "stm32f10x.h" #include "stm32f10x_adc.h" #include "ad.h" #inc…...

微服务之商城系统
一、商城系统建立之前的一些配置 1、nacos Nacos是一个功能丰富的开源平台,用于配置管理、服务发现和注册、健康检查等,帮助构建和管理分布式系统。 在linux上安装nacos容器的命令: docker run --name nacos-standalone -e MODEstandalone …...
安卓玩机工具推荐----高通芯片9008端口读写分区 备份分区 恢复分区 制作线刷包 工具操作解析
上期解析了下adb端口备份分区的有关操作 安卓玩机工具推荐----ADB状态读写分区 备份分区 恢复分区 查看分区号 工具操作解析 在以往的博文中对于高通芯片机型的分区读写已经分享了很多。相关类似博文 安卓备份分区----手动查询安卓系统分区信息 导出系统分区的一些基本操作 …...

全量知识系统问题及SmartChat给出的答复 之16 币圈生态链和行为模式
Q.42 币圈生态链和行为模式 我认为,上面和“币”有关的一系列概念和技术,按设计模式的划分 ,整体应该都属于行为模式,而且应该囊括行为模式的所有各个方面。 而行为又可以按照三种不同的导向(以目的或用途为导向、过…...
【MOMO_Tips】批量将word转换为PDF格式
批量将word转换为PDF格式 1.打开文件–>选项–>自定义功能区–>开发工具–>确定 2.点开开发工具,选择第一个visual basic 3.进入页面后找到插入–>模块,就可以看到这样的画面之后将下列vba代码复制粘贴到模块中 Sub ConvertWordsToPd…...
idea大量爆红问题解决
问题描述 在学习和工作中,idea是程序员不可缺少的一个工具,但是突然在有些时候就会出现大量爆红的问题,发现无法跳转,无论是关机重启或者是替换root都无法解决 就是如上所展示的问题,但是程序依然可以启动。 问题解决…...
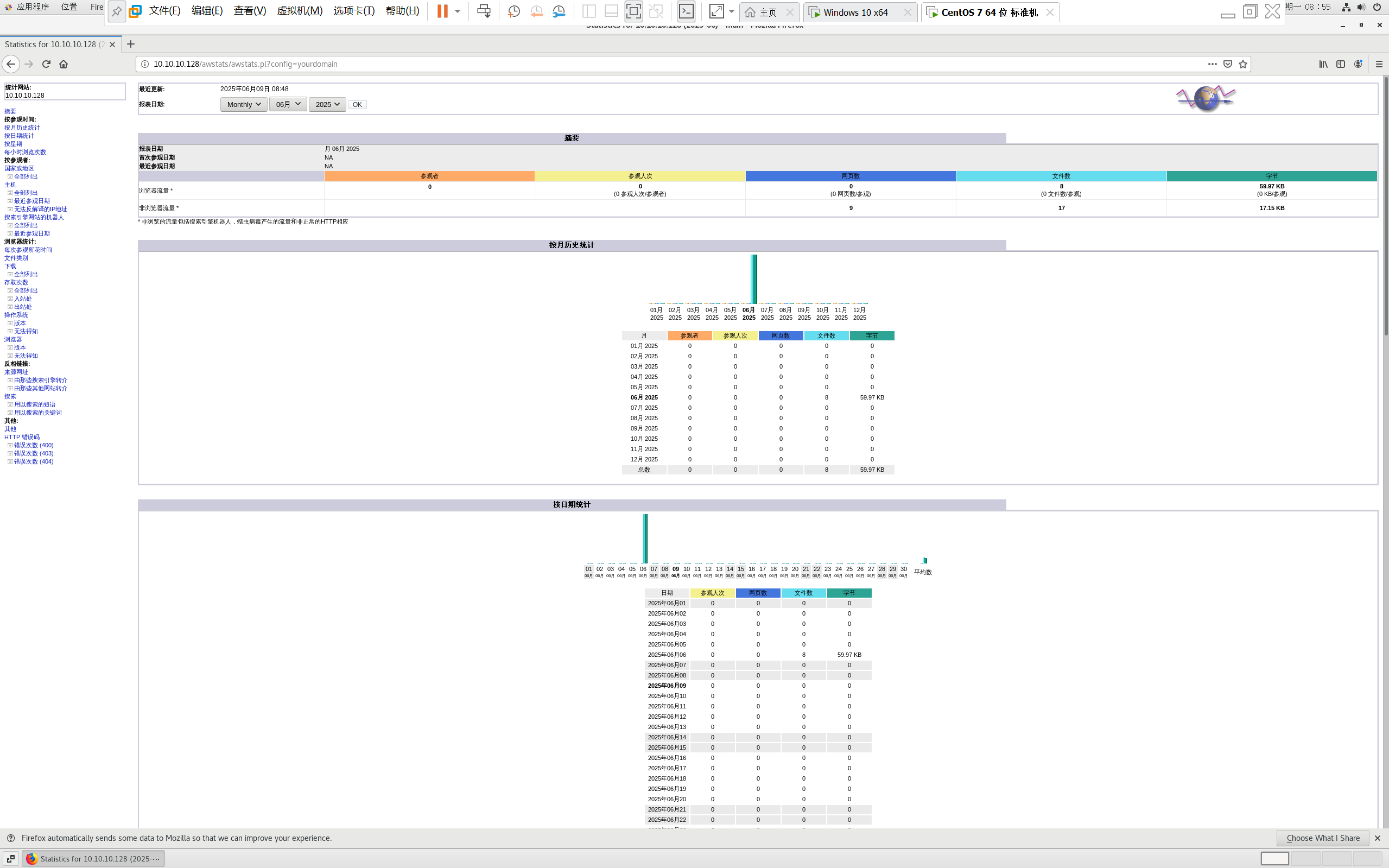
centos 7 部署awstats 网站访问检测
一、基础环境准备(两种安装方式都要做) bash # 安装必要依赖 yum install -y httpd perl mod_perl perl-Time-HiRes perl-DateTime systemctl enable httpd # 设置 Apache 开机自启 systemctl start httpd # 启动 Apache二、安装 AWStats࿰…...

Psychopy音频的使用
Psychopy音频的使用 本文主要解决以下问题: 指定音频引擎与设备;播放音频文件 本文所使用的环境: Python3.10 numpy2.2.6 psychopy2025.1.1 psychtoolbox3.0.19.14 一、音频配置 Psychopy文档链接为Sound - for audio playback — Psy…...

Robots.txt 文件
什么是robots.txt? robots.txt 是一个位于网站根目录下的文本文件(如:https://example.com/robots.txt),它用于指导网络爬虫(如搜索引擎的蜘蛛程序)如何抓取该网站的内容。这个文件遵循 Robots…...

ios苹果系统,js 滑动屏幕、锚定无效
现象:window.addEventListener监听touch无效,划不动屏幕,但是代码逻辑都有执行到。 scrollIntoView也无效。 原因:这是因为 iOS 的触摸事件处理机制和 touch-action: none 的设置有关。ios有太多得交互动作,从而会影响…...

优选算法第十二讲:队列 + 宽搜 优先级队列
优选算法第十二讲:队列 宽搜 && 优先级队列 1.N叉树的层序遍历2.二叉树的锯齿型层序遍历3.二叉树最大宽度4.在每个树行中找最大值5.优先级队列 -- 最后一块石头的重量6.数据流中的第K大元素7.前K个高频单词8.数据流的中位数 1.N叉树的层序遍历 2.二叉树的锯…...
HDFS分布式存储 zookeeper
hadoop介绍 狭义上hadoop是指apache的一款开源软件 用java语言实现开源框架,允许使用简单的变成模型跨计算机对大型集群进行分布式处理(1.海量的数据存储 2.海量数据的计算)Hadoop核心组件 hdfs(分布式文件存储系统)&a…...
R语言速释制剂QBD解决方案之三
本文是《Quality by Design for ANDAs: An Example for Immediate-Release Dosage Forms》第一个处方的R语言解决方案。 第一个处方研究评估原料药粒径分布、MCC/Lactose比例、崩解剂用量对制剂CQAs的影响。 第二处方研究用于理解颗粒外加硬脂酸镁和滑石粉对片剂质量和可生产…...
LLMs 系列实操科普(1)
写在前面: 本期内容我们继续 Andrej Karpathy 的《How I use LLMs》讲座内容,原视频时长 ~130 分钟,以实操演示主流的一些 LLMs 的使用,由于涉及到实操,实际上并不适合以文字整理,但还是决定尽量整理一份笔…...

基于Springboot+Vue的办公管理系统
角色: 管理员、员工 技术: 后端: SpringBoot, Vue2, MySQL, Mybatis-Plus 前端: Vue2, Element-UI, Axios, Echarts, Vue-Router 核心功能: 该办公管理系统是一个综合性的企业内部管理平台,旨在提升企业运营效率和员工管理水…...