广义状态平均法功率变换器建模分析
两种状态平均法在功率变换器建模的应用比较
[!info] Bibliography
[1] 高朝晖, 林辉张晓斌 & 吴小华, “两种状态平均法在功率变换器建模的应用比较,” 计算机仿真, no. 241-244+248, 2008.
[!note]
状态空间平均法采用直流量近似(线性系统模型),广义状态空间平均采用直流量和基波分量近似。也即状态空间平均法采用0阶傅里叶级数近似,广义状态空间平均采用0阶和1阶傅里叶级数近似
应用状态空间平均法分析 Buck变换器
广义状态平均法(GSSA)
广义状态平均采用傅里叶级数拟合系统状态:
x(t)=∑n=−∞∞⟨x⟩n(t)ejnωtx(t) = \sum_{n = -\infty}^\infty \langle x \rangle_n(t) e^{j n \omega t} x(t)=n=−∞∑∞⟨x⟩n(t)ejnωt
- ω=2π/T\omega = 2\pi / Tω=2π/T
⟨x⟩n(t)\langle x \rangle_n(t)⟨x⟩n(t) 代表傅里叶系数:
⟨x⟩n(t)=1T∫t−Ttx(τ)e−jnωτdτ\langle x \rangle_n(t) = \frac 1T \int_{t-T}^t x(\tau) e^{-j n \omega \tau}d\tau ⟨x⟩n(t)=T1∫t−Ttx(τ)e−jnωτdτ
- nnn is AKA index-k average
三角形式傅里叶级数:
x(τ)=⟨x⟩0+2∑n=1∞(a1cos(nωτ)+b1sin(nωτ))x(\tau)=\langle x\rangle_0+2 \sum_{n=1}^{\infty}\left(a_1 \cos (n \omega \tau) + b_1 \sin (n \omega \tau)\right) x(τ)=⟨x⟩0+2n=1∑∞(a1cos(nωτ)+b1sin(nωτ))
- ⟨x⟩n(t)=an−jbn\langle x\rangle_n(t) = a_n - j b_n⟨x⟩n(t)=an−jbn
an=12π∫02πx(ωτ)cos(ωτ)d(ωτ)bn=12π∫02πx(ωτ)sin(ωτ)d(ωτ)⟨x⟩0=1T∫t−Ttx(τ)dτ\begin{aligned} {a}_n &=\frac{1}{2 \pi} \int_0^{2 \pi} {x}(\omega \tau) \cos (\omega \tau) \mathrm{d}(\omega \tau) \\ {b}_n &=\frac{1}{2 \pi} \int_0^{2 \pi} {x}(\omega \tau) \sin (\omega \tau) \mathrm{d}(\omega \tau) \\ \langle{x}\rangle_0 &=\frac{1}{{T}} \int_{t-{T}}^t {x}(\tau) \mathrm{d} \tau \end{aligned} anbn⟨x⟩0=2π1∫02πx(ωτ)cos(ωτ)d(ωτ)=2π1∫02πx(ωτ)sin(ωτ)d(ωτ)=T1∫t−Ttx(τ)dτ
性质:
-
d⟨x⟩n(t)dt=⟨dxdt⟩n(t)−jnω⟨x⟩n(t)\frac{d \langle x\rangle_n(t)}{d t}=\left\langle\frac{d x}{d t}\right\rangle_n(t)-j n \omega\langle x\rangle_n(t)dtd⟨x⟩n(t)=⟨dtdx⟩n(t)−jnω⟨x⟩n(t)
[!note] Proof
⟨x⟩n(t)=1T∫0Tx(t−T+s)e−jnω(t−T+s)ds\langle x \rangle_n(t) = \frac1T \int_0^T x(t - T + s) e^{-j n \omega(t-T+s)}ds⟨x⟩n(t)=T1∫0Tx(t−T+s)e−jnω(t−T+s)ds
-
⟨qx⟩n=∑i=−∞∞⟨q⟩n−i⟨x⟩i\langle qx \rangle_n = \sum_{i = -\infty}^\infty \langle q \rangle_{n -i} \langle x \rangle_i⟨qx⟩n=∑i=−∞∞⟨q⟩n−i⟨x⟩i
Suppose that x(t)x(t)x(t) and q(t)q(t)q(t) can be approximated by 0- and 1-order Fourier series (即直流和基波量):
q(t)≈⟨q⟩0+⟨q⟩−1e−jωt+⟨q⟩1ejωtx(t)≈⟨x⟩0+⟨x⟩−1e−jωt+⟨x⟩1ejωt\begin{aligned} q(t) &\approx \langle q \rangle_0 + \langle q \rangle_{-1} e^{- j \omega t} + \langle q \rangle_1 e^{j \omega t} \\ x(t) &\approx \langle x \rangle_0 + \langle x \rangle_{-1} e^{- j \omega t} + \langle x \rangle_1 e^{j \omega t} \end{aligned} q(t)x(t)≈⟨q⟩0+⟨q⟩−1e−jωt+⟨q⟩1ejωt≈⟨x⟩0+⟨x⟩−1e−jωt+⟨x⟩1ejωt
[!note]
这里注意,三角形式傅里叶级数中的直流和基波项(a0/2+a1cos(ωt)+b1sin(ωt)a_0/2 + a_1 \cos(\omega t) + b_1 \sin(\omega t)a0/2+a1cos(ωt)+b1sin(ωt))对应于复数形式的傅立叶级数中 000、±1±1±1次项(c0+c−1e−iωt+c1eiωtc_0 + c_{-1}e^{-i \omega t}+ c_{1} e^{i\omega t}c0+c−1e−iωt+c1eiωt)
xxx 和 qqq 乘积可表示为:
⟨qx⟩0=⟨q⟩0⟨x⟩0+⟨q⟩−1⟨x⟩1+⟨q⟩1⟨x⟩−1⟨qx⟩1=⟨q⟩0⟨x⟩1+⟨q⟩1⟨x⟩0⟨qx⟩−1=⟨q⟩0⟨x⟩−1+⟨q⟩−1⟨x⟩0\begin{aligned} \langle qx \rangle_0 &= \langle q \rangle_0 \langle x \rangle_0 + \langle q \rangle_{-1} \langle x \rangle_1 + \langle q \rangle_1 \langle x \rangle_{-1} \\ \langle qx \rangle_1 &= \langle q \rangle_0 \langle x \rangle_1 + \langle q \rangle_{1} \langle x \rangle_0\\ \langle qx \rangle_{-1} &= \langle q \rangle_0 \langle x \rangle_{-1} + \langle q \rangle_{-1} \langle x \rangle_0 \end{aligned} ⟨qx⟩0⟨qx⟩1⟨qx⟩−1=⟨q⟩0⟨x⟩0+⟨q⟩−1⟨x⟩1+⟨q⟩1⟨x⟩−1=⟨q⟩0⟨x⟩1+⟨q⟩1⟨x⟩0=⟨q⟩0⟨x⟩−1+⟨q⟩−1⟨x⟩0
正负平均指数互为共轭⟨x⟩1=⟨x⟩−1∗\langle x \rangle_1 = \langle x \rangle_{-1}^*⟨x⟩1=⟨x⟩−1∗
- ⟨q⟩1=⟨q⟩1R+j⟨q⟩1I=⟨q⟩−1∗=(⟨q⟩−1R+⟨q⟩−1I)∗\langle q \rangle_1 = \langle q \rangle_1^R + j \langle q \rangle_1^I = \langle q \rangle_{-1}^* = \left(\langle q \rangle_{-1}^R + \langle q \rangle_{-1}^I\right)^*⟨q⟩1=⟨q⟩1R+j⟨q⟩1I=⟨q⟩−1∗=(⟨q⟩−1R+⟨q⟩−1I)∗
- ⟨x⟩1=⟨x⟩1R+j⟨x⟩1I=⟨x⟩−1∗=(⟨x⟩−1R+⟨x⟩−1I)∗\langle x \rangle_1 = \langle x \rangle_1^R + j \langle x \rangle_1^I = \langle x \rangle_{-1}^* = \left(\langle x \rangle_{-1}^R + \langle x \rangle_{-1}^I\right)^*⟨x⟩1=⟨x⟩1R+j⟨x⟩1I=⟨x⟩−1∗=(⟨x⟩−1R+⟨x⟩−1I)∗
于是
⟨qx⟩0=⟨q⟩0⟨x⟩0+2(⟨q⟩1R⟨x⟩1R+⟨q⟩1I⟨x⟩1I)⟨qx⟩1R=⟨q⟩0⟨x⟩1R+⟨q⟩1R⟨x⟩0⟨qx⟩1I=⟨q⟩0⟨x⟩1I+⟨q⟩1I⟨x⟩0\begin{aligned} \langle qx \rangle_0 &= \langle q \rangle_0 \langle x \rangle_0 + 2\left(\langle q \rangle_{1}^R \langle x \rangle_1^R + \langle q \rangle_1^I \langle x \rangle_{1}^I\right) \\ \langle qx \rangle_1^R &= \langle q \rangle_0 \langle x \rangle_1^R + \langle q \rangle_{1}^R \langle x \rangle_0\\ \langle qx \rangle_{1}^I &= \langle q \rangle_0 \langle x \rangle_{1}^I + \langle q \rangle_{1}^I \langle x \rangle_0 \end{aligned} ⟨qx⟩0⟨qx⟩1R⟨qx⟩1I=⟨q⟩0⟨x⟩0+2(⟨q⟩1R⟨x⟩1R+⟨q⟩1I⟨x⟩1I)=⟨q⟩0⟨x⟩1R+⟨q⟩1R⟨x⟩0=⟨q⟩0⟨x⟩1I+⟨q⟩1I⟨x⟩0
GSSA 建模 BUCK
定义开关函数
q(t)={0关1开q(t) =\left\{ \begin{matrix} 0 & 关 \\ 1 & 开 \end{matrix} \right. q(t)={01关开
BUCK system model:
LdiLdt=vinq(t)−voCdvodt=iL−voR\begin{aligned} & L \frac{d {i_L}}{d t}=v_{i n} q(t)-v_o \\ & C \frac{d v_o}{d t}=i_L-\frac{v_o}{R} \end{aligned} LdtdiL=vinq(t)−voCdtdvo=iL−Rvo
0 平均指数模型:
Ld⟨iL⟩0dt=Vin⟨q⟩0−⟨vo⟩0Cd⟨vo⟩0dt=⟨iL⟩0−⟨vo⟩0R\begin{aligned} & L\frac{d\langle i_L\rangle_0}{dt}=V_{in} \langle q \rangle_0 - \langle v_o \rangle_0 \\ & C\frac{d\langle v_o\rangle_0}{dt}=\langle{i_L}\rangle_0-\frac{\left\langle\mathrm{v}_o\right\rangle_0}{{R}} \end{aligned} Ldtd⟨iL⟩0=Vin⟨q⟩0−⟨vo⟩0Cdtd⟨vo⟩0=⟨iL⟩0−R⟨vo⟩0
1平均指数模型:
d⟨iL⟩1dt=−jω⟨iL⟩1+1L(Vin⟨q⟩1−⟨vo⟩1)d⟨vo⟩1dt=−jω⟨vo⟩1+1C(⟨iL⟩0−⟨vo⟩0R)\begin{aligned} \frac{d\langle i_L\rangle_1}{dt} &= -j\omega \langle i_L\rangle_1 + \frac1L \left( V_{in} \langle q \rangle_1 - \langle v_o \rangle_1 \right)\\ \frac{d\langle v_o\rangle_1}{dt} &= -j\omega \langle v_o \rangle_1 + \frac 1C \left( \langle{i_L}\rangle_0-\frac{\left\langle\mathrm{v}_o\right\rangle_0}{{R}} \right) \end{aligned} dtd⟨iL⟩1dtd⟨vo⟩1=−jω⟨iL⟩1+L1(Vin⟨q⟩1−⟨vo⟩1)=−jω⟨vo⟩1+C1(⟨iL⟩0−R⟨vo⟩0)
考虑共轭关系,1平均指数模型的实部虚部分别可以写作:
d⟨iL⟩1Rdt=ω⟨iL⟩1I+1L(Vin⟨q⟩1R−⟨vo⟩1R)d⟨iL⟩1Idt=−ω⟨iL⟩1R+1L(Vin⟨q⟩1I−⟨vo⟩1I)d⟨vo⟩1Rdt=ω⟨vo⟩1I+1C(⟨iL⟩1R−⟨vo⟩1RR)d⟨vo⟩1Idt=−ω⟨vo⟩1R+1C(⟨iL⟩1I−⟨vo⟩1IR)\begin{aligned} \frac{d\langle i_L\rangle_1^R}{dt} &= \omega \langle i_L\rangle_1^I + \frac1L \left( V_{in} \langle q \rangle_1^R - \langle v_o \rangle_1^R \right)\\ \frac{d\langle i_L\rangle_1^I}{dt} &= -\omega \langle i_L\rangle_1^R + \frac1L \left( V_{in} \langle q \rangle_1^I - \langle v_o \rangle_1^I \right)\\ \frac{d\langle v_o\rangle_1^R}{dt} &= \omega \langle v_o \rangle_1^I + \frac 1C \left( \langle{i_L}\rangle_1^R-\frac{\left\langle\mathrm{v}_o\right\rangle_1^R}{{R}} \right)\\ \frac{d\langle v_o\rangle_1^I}{dt} &= -\omega \langle v_o \rangle_1^R + \frac 1C \left( \langle{i_L}\rangle_1^I -\frac{\left\langle\mathrm{v}_o\right\rangle_1^I}{{R}} \right) \end{aligned} dtd⟨iL⟩1Rdtd⟨iL⟩1Idtd⟨vo⟩1Rdtd⟨vo⟩1I=ω⟨iL⟩1I+L1(Vin⟨q⟩1R−⟨vo⟩1R)=−ω⟨iL⟩1R+L1(Vin⟨q⟩1I−⟨vo⟩1I)=ω⟨vo⟩1I+C1(⟨iL⟩1R−R⟨vo⟩1R)=−ω⟨vo⟩1R+C1(⟨iL⟩1I−R⟨vo⟩1I)
选取状态变量x=[⟨iL⟩1R,⟨iL⟩1I,⟨vo⟩1R,⟨vo⟩1I,⟨iL⟩0R,⟨vo⟩0R]Tx = [\langle i_L\rangle_1^R, \langle i_L\rangle_1^I, \langle v_o \rangle_1^R, \langle v_o \rangle_1^I,\langle i_L \rangle_0^R, \langle v_o \rangle_0^R]^Tx=[⟨iL⟩1R,⟨iL⟩1I,⟨vo⟩1R,⟨vo⟩1I,⟨iL⟩0R,⟨vo⟩0R]T, 可以得到状态空间方程:
x˙=Ax+Bu\begin{aligned} \dot x &= Ax + Bu\\ \end{aligned} x˙=Ax+Bu
- A=[0ω−1/L000−ω00−1/L001/C0−1/(RC)ω0001/C−ω−1/(RC)0000000−1/L00001/C−1/(RC)]A = \left[\begin{matrix} 0 & \omega & -1/L &0 & 0&0 \\ -\omega & 0 & 0 & -1/L & 0 & 0\\ 1/C & 0 & -1/(RC) & \omega & 0 & 0\\ 0 & 1/C & -\omega & -1/(RC) & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & -1/L \\ 0 & 0 & 0 & 0 & 1/C & -1 / (RC) \end{matrix}\right]A=0−ω1/C000ω001/C00−1/L0−1/(RC)−ω000−1/Lω−1/(RC)00000001/C0000−1/L−1/(RC)
- B=[⟨q⟩1RL,⟨q⟩1IL,0,0,⟨q⟩0L,0]TB = \left[\frac{\langle q \rangle_1^R}L, \frac{\langle q \rangle_1^I}L, 0, 0, \frac{\langle q \rangle_0}L,0 \right]^TB=[L⟨q⟩1R,L⟨q⟩1I,0,0,L⟨q⟩0,0]T
- u=Vinu = V_{in}u=Vin
开关函数 q(t)q(t)q(t) 的 0 阶和 1 阶傅里叶系数:
⟨q⟩1R=12π∫02πDcos(ωτ)d(ωτ)=12πsin(2πD)⟨q⟩1I=−12π∫02πDsin(ωτ)d(ωτ)=12π[cos(2πD)−1]⟨q⟩0=D\begin{aligned} \langle q \rangle_1^R &= \frac 1{2\pi} \int_0^{2\pi D} \cos (\omega \tau ) d(\omega \tau) = \frac1{2\pi} \sin (2\pi D)\\\langle q \rangle_1^I &= -\frac 1{2\pi} \int_0^{2\pi D} \sin (\omega \tau ) d(\omega \tau) = \frac1{2\pi} [\cos (2\pi D) - 1]\\ \langle q \rangle_0 &= D\\ \end{aligned} ⟨q⟩1R⟨q⟩1I⟨q⟩0=2π1∫02πDcos(ωτ)d(ωτ)=2π1sin(2πD)=−2π1∫02πDsin(ωτ)d(ωτ)=2π1[cos(2πD)−1]=D
根据广义状态模型的解 xxx,可以得到系统输出为
iL=2x1cos(ωt)−2x2sin(ωt)+x5vo=2x3cos(ωt)−2x4sin(ωt)+x6\begin{aligned} i_L &= 2x_1 \cos (\omega t) - 2x_2 \sin (\omega t) + x_5\\ v_o &= 2x_3 \cos (\omega t) - 2x_4 \sin (\omega t) + x_6\\ \end{aligned} iLvo=2x1cos(ωt)−2x2sin(ωt)+x5=2x3cos(ωt)−2x4sin(ωt)+x6
namely:
iL=2⟨iL⟩1Rcos(ωt)−2⟨iL⟩1Isin(ωt)+⟨iL⟩0vo=2⟨vo⟩1Rcos(ωt)−2⟨vo⟩1Isin(ωt)+⟨vo⟩0\begin{aligned} i_L &= 2\langle i_L \rangle_1^R \cos (\omega t) - 2\langle i _L\rangle_1^I \sin (\omega t) + \langle i_L\rangle_0\\ v_o &= 2\langle v_o \rangle_1^R \cos (\omega t) - 2\langle v_o \rangle_1^I \sin (\omega t) + \langle v_o \rangle_0\\ \end{aligned} iLvo=2⟨iL⟩1Rcos(ωt)−2⟨iL⟩1Isin(ωt)+⟨iL⟩0=2⟨vo⟩1Rcos(ωt)−2⟨vo⟩1Isin(ωt)+⟨vo⟩0
另外,普通状态平均的解其实是
iLSSA=x5,voSSA=x6i_{L_{SSA}} = x_5, v_{o_{SSA}} = x_6 iLSSA=x5,voSSA=x6
仿真研究
MATLAB Code:
%---------------------------------------
% This is the simulation from
% 两种状态平均法在功率变换器建模的应用比较
%
% hu 2023-03-03
%---------------------------------------clc,clear,close allVin = 20;
R = 10;
L = 1e-3;
C = 1e-6;
f = 40e3;
w = 2 * pi * f;
T = 1 / f;
sim my_power_BuckConverter
D = .5;
q1R = 1 / 2 / pi * sin(2 * pi * D);
q1I = 1 / 2 / pi * (cos(2 * pi * D) - 1);
q0 = D;A = [0 w -1/L 0 0 0-w 0 0 -1/L 0 01/C 0 -1/(R*C) w 0 00 1/C -w -1/(R*C) 0 00 0 0 0 0 -1/L0 0 0 0 1/C -1/(R*C)];
B = [q1R / L, q1I / L, 0, 0, q0 / L, 0]';
x = zeros(6,1);
u = Vin;ts = 0;
h = T/500;
tf = 1e-3;iLGSSAout = [];
voGSSAout = [];
iLSSAout = [];
voSSAout = [];for t=ts:h:tfxdot = A * x + B * u;x = x + xdot * h;iLGSSA = 2 * x(1) * cos(w * t) - 2 * x(2) * sin(w * t) + x(5);voGSSA = 2 * x(3) * cos(w * t) - 2 * x(4) * sin(w * t) + x(6);iLSSA = x(5);voSSA = x(6);iLGSSAout = [iLGSSAout;iLGSSA];voGSSAout = [voGSSAout;voGSSA];iLSSAout = [iLSSAout;iLSSA];voSSAout = [voSSAout;voSSA];
endt = ts:h:tf;
pos = mypos(8);
i = 1;
linewidth = 1.5;
fontsize = 12;
tSIM = iLSIMout.Time;
iLGSSAout_interp = interp1(t,iLGSSAout,tSIM);
iLSSAout_interp = interp1(t,iLSSAout,tSIM);
voGSSAout_interp = interp1(t,voGSSAout,tSIM);
voSSAout_interp = interp1(t,voSSAout,tSIM);figure
plot(tSIM,iLGSSAout_interp,tSIM,iLSSAout_interp,tSIM,iLSIMout.Data,'linewidth',linewidth);
h = legend('$i_{L_{GSSA}}$','$i_{L_{SSA}}$','$i_{L_{SIM}}$');
h.Interpreter = 'latex';
h.FontSize = fontsize;
h.Location = 'southeast';
h.Orientation = 'horizon';
set(gcf,'position',pos{i});
i = i + 1;
grid onfigure
plot(tSIM,voGSSAout_interp,tSIM,voSSAout_interp,tSIM,voSIMout.Data,'linewidth',linewidth);
h = legend('$v_{o_{GSSA}}$', '$v_{o_{SSA}}$', '$v_{o_{SIM}}$');
h.Interpreter = 'latex';
h.FontSize = fontsize;
h.Location = 'southeast';
h.Orientation = 'horizon';
set(gcf,'position',pos{i});
i = i + 1;
grid on
mypos function:
function pos = mypos(i,figs1,figs2)
% mypos.m 给定 figure 对象个数求解合适的摆放位置向量以防止图片堆叠
% i figure 个数
% figs1,figs2 figure 对象的长和高
% pos = mypos(i,figs1,figs2) 求出 i 个 figure 对象的合理摆放位置,且大小设置为[figs1,figs2]
% 输出 pos 是元胞数组,使用规范(已生成figure对象后):set(gcf,'position',pos{i})
% Remark 更方便的绘图程序见 myplot.m% hu 2018-6-11
% hu 2018-8-8 Modified Remark is added
% hu 2018-11-3 Modified Description is updatedif nargin ~= 3figs = [400,300]; %default size is 560*420, 500*280 is suitable for paper shows
elsefigs = [figs1,figs2];
end
if i > 8disp('too many figures! The maximum number is 8')
end
scr = get(0,'screensize');
for k = 1:iif k <= 4pos{k} = [scr(1) + (k - 1) * figs(1),scr(2) + scr(4) / 2,figs];endif k > 4pos{k} = [scr(1) + (k - 5) * scr(3) / 4,scr(2) + 30,figs];end
end
end
真实数据用 SIMULINK 2018a 得到,PWM 频率 f=40kHzf = 40kHzf=40kHz,可以看到 GSSA 基本和 SIMULINK 数据重合,SSA 仅代表了其直流分量


仿真文件: 链接: https://pan.baidu.com/s/1ftQQ68H0nHVZ3LQkPNEObw?pwd=mgf4 提取码: mgf4
相关文章:
广义状态平均法功率变换器建模分析
两种状态平均法在功率变换器建模的应用比较 [!info] Bibliography [1] 高朝晖, 林辉张晓斌 & 吴小华, “两种状态平均法在功率变换器建模的应用比较,” 计算机仿真, no. 241-244248, 2008. [!note] 状态空间平均法采用直流量近似(线性系统模型)&…...

基于Spring Boot的快递管理系统
文章目录 项目介绍主要功能截图:登录我要收件我要寄件个人信息我收到的我寄出的物流管理用户管理部分代码展示设计总结项目获取方式🍅 作者主页:Java韩立 🍅 简介:Java领域优质创作者🏆、 简历模板、学习资料、面试题库【关注我,都给你】 🍅文末获取源码联系🍅 项…...
)
nerdctl不完全使用指南(开发者)
目录 背景 环境配置 1.编译golang可执行文件 2.快速构建镜像 背景 k8s在1.22版本放弃docker作为runtime后采用了containerd,以containerd作为runtime的k8s安装方法已经出现了很多开源集成工具或者解决方案,在此不做赘述。本篇只要是描述在docker被取…...
)
【独家】华为OD机试 - 分糖果(C 语言解题)
最近更新的博客 华为od 2023 | 什么是华为od,od 薪资待遇,od机试题清单华为OD机试真题大全,用 Python 解华为机试题 | 机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南)华为od机试,独家整理 已参加机试人员的实战技巧文章目录 最近更新的博客使用说明本期…...
八股总结(二)计算机网络与网络编程
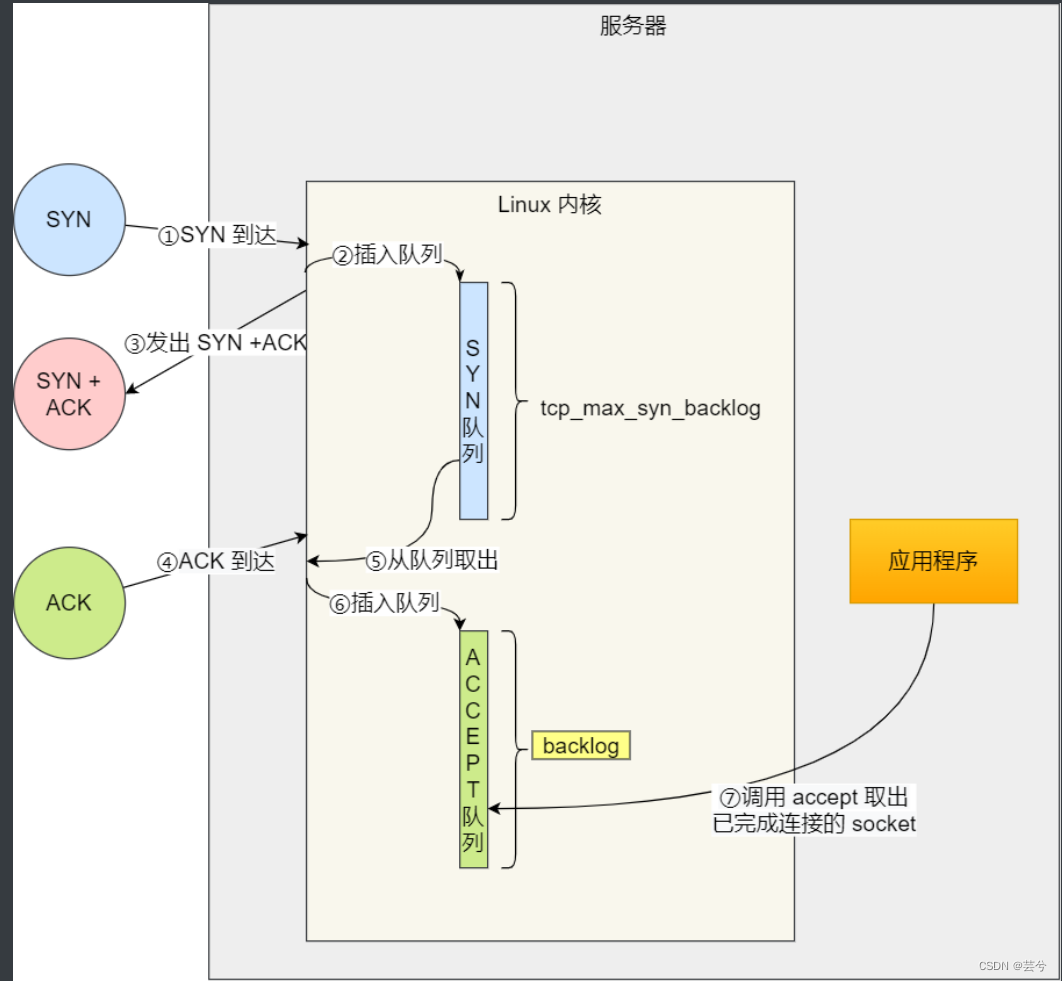
layout: post title: 八股总结(二)计算机网络与网络编程 description: 八股总结(二)计算机网络与网络编程 tag: 八股总结 文章目录计算机网络网络模型网络体系结构在浏览器输入一个网址后回车,背后都发生了什么&#x…...

ChatGPT 一本正经的胡说八道 那也看看原理吧
最近,ChatGPT横空出世。这款被马斯克形容为“强大到危险”的AI,不但能够与人聊天互动,还能写文章、改代码。于是,人们纷纷想让AI替自己做些什么,有人通过两分钟的提问便得到了一篇完美的论文,有人希望它能帮…...

ChatGPT:一个人机环境系统交互的初级产品
从人机环境系统智能的角度看,Chatgpt就是一个还没有开始上道的系统。“一阴一阳之谓道”,Chatgpt的“阴”(默会隐性的部分)尚无体现,就是“阳”(显性描述的部分)还停留在人类与大数据交互的浅层…...

PaddlePaddle本地环境安装(windows11系统)
写在前面: 这里是关于win11安装PaddlePaddle的步骤和方法,建议参考官方的方法。截止2023年3月份,PaddlePaddle的版本是2.4.2。 官方参考:飞桨PaddlePaddle快速安装使用方法 建议使用Anaconda安装 ,关于Anaconda创建环境的可以借鉴:深度学习Anaconda环境搭建(比较全面)…...
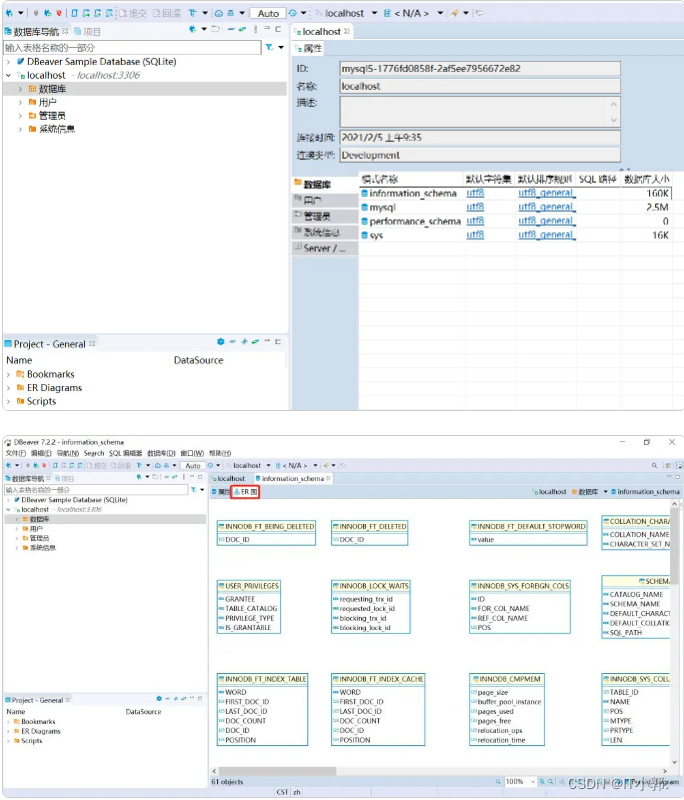
DBeaver 超级详细的安装与使用
一、下载DBeaver DBeaver是一种通用数据库管理工具,适用于需要以专业方式使用数据的每个人;适用于开发人员,数据库管理员,分析师和所有需要使用数据库的人员的免费(DBeaver Community) 的多平台数据库工具。 DBeaver支持80多个数据…...
计算机网络的166个概念 你知道几个第七部分
计算机网络传输层 可靠数据传输:确保数据能够从程序的一端准确无误的传递给应用程序的另一端。 容忍丢失的应用:应用程序在发送数据的过程中可能会存在数据丢失的情况。 非持续连接:每个请求/响应会对经过不同的连接,每一个连接…...

海尔三翼鸟:生态聚拢的密度,决定场景落地速度
最近学到一个新词,叫做涌现能力。 怎么理解呢?我们以当下最火的ChatGPT为例,GPT1模型是1.17亿参数,GPT2有15亿参数,GPT3有1750亿个参数。研究人员在放大模型规模的进程中发现一个惊人的现象,模型参数达到一…...
前端基础知识
文章目录前端基础知识HTML1. html基本结构2.常见的html标签注释标签标题标签(h1~h6)段落标签p换行标签 br格式化标签图片标签:img超链接标签表格标签列表标签表单标签input标签label标签select标签textarea 标签盒子标签div&span3. html特殊字符CSS1. 基本语法2…...

LiveData 面试题库、解答、源码分析
引子LiveData 是能感知生命周期的,可观察的,粘性的,数据持有者。LiveData 用于以“数据驱动”方式更新界面。换一种描述方式:LiveData 缓存了最新的数据并将其传递给正活跃的组件。关于数据驱动的详解可以点击我是怎么把业务代码越…...

kotlin用object实现单例模式,companion object与java静态
kotlin用object实现单例模式,companion object与java静态 kotlin中很容易使用object实现java中的单例模式。由于kotlin中没有static修饰词,可以用companion object实现Java中的static效果。 //object相当于java的单例 object Singleton {var count: In…...

智慧楼宇中的“黑科技”
据不完全统计,无论是居家、办公、学习还是社交,人们有80%的时间都是在室内空间度过的。而随着社会生产力水平与人们消费理念的提升,用户对于楼宇建筑的使用要求也在不断提高,从最基本的舒适为先逐步朝着数字化、智慧化升级。 如果…...

炫云渲染质量功能测试
炫云已经支持优化渲染质量,分别是保守优化、中度优化和深度优化,使用后效果图的渲染时间会有所缩短,尤其对低版本V-Ray和参数设置不当的场景非常有效,能大幅提升渲染速度及节省渲染费用,当然最终效果图有可能有稍许差异…...

SpringBoot入门
文章目录前言一、约定大于配置二、使用步骤1.使用IDEA创建SpringBoot项目2.引入依赖3.测试三、application.properties和application.yml配置文件四、application.yml配置多环境五、测试:总结前言 SpringBoot并不是一门新的技术栈,它的主要目的是为了去…...
)
D. Constant Palindrome Sum(差分数组维护)
Problem - D - Codeforces 题意:给定长度为n的数组,每次操作可以选择一个数令a[i]变成[1,k]范围内的一个数,问最少需要多少次操作可以让a[i]a[n-i1]x (1< i < n/2)满足。 思路:利用差分数组d[i]表示x取i需要的总操作数。 …...
【C++】30h速成C++从入门到精通(IO流)
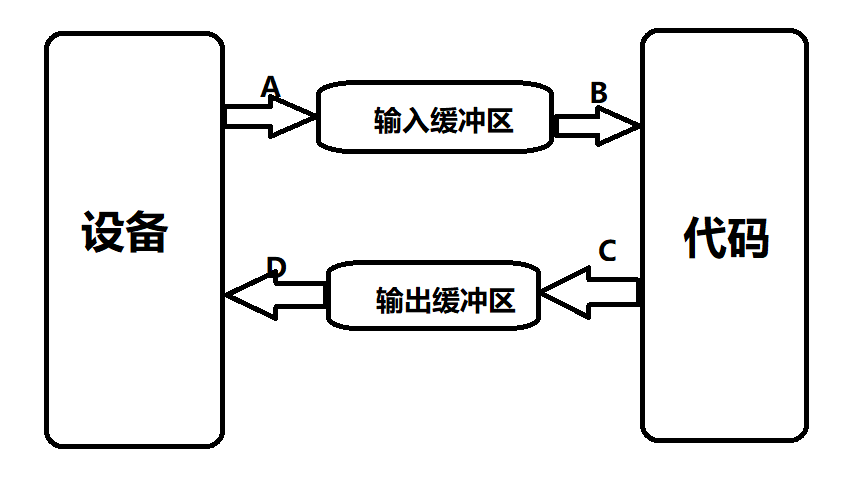
C语言的输入与输出C语言中我们用到的最频繁的输入输出方式就是scanf ()与printf()。 scanf(): 从标准输入设备(键盘)读取数据,并将值存放在变量中。printf(): 将指定的文字/字符串输出到标准输出设备(屏幕)。注意宽度输出和精度输出控制。C语言借助了相应的缓冲区来…...
文件变成chk如何恢复正常
许多人不知道chk文件是什么?其实它是用户在使用“磁盘碎片整理程序”整理硬盘后所产生的“丢失簇的恢复文件”,而在u盘、内存卡等移动设备读取数据过程中,由于断电或强制拔出也容易产生大量的chk文件。那么文件变成chk如何恢复正常呢…...

IDEA运行Tomcat出现乱码问题解决汇总
最近正值期末周,有很多同学在写期末Java web作业时,运行tomcat出现乱码问题,经过多次解决与研究,我做了如下整理: 原因: IDEA本身编码与tomcat的编码与Windows编码不同导致,Windows 系统控制台…...
: K8s 核心概念白话解读(上):Pod 和 Deployment 究竟是什么?)
云原生核心技术 (7/12): K8s 核心概念白话解读(上):Pod 和 Deployment 究竟是什么?
大家好,欢迎来到《云原生核心技术》系列的第七篇! 在上一篇,我们成功地使用 Minikube 或 kind 在自己的电脑上搭建起了一个迷你但功能完备的 Kubernetes 集群。现在,我们就像一个拥有了一块崭新数字土地的农场主,是时…...

【杂谈】-递归进化:人工智能的自我改进与监管挑战
递归进化:人工智能的自我改进与监管挑战 文章目录 递归进化:人工智能的自我改进与监管挑战1、自我改进型人工智能的崛起2、人工智能如何挑战人类监管?3、确保人工智能受控的策略4、人类在人工智能发展中的角色5、平衡自主性与控制力6、总结与…...
label-studio的使用教程(导入本地路径)
文章目录 1. 准备环境2. 脚本启动2.1 Windows2.2 Linux 3. 安装label-studio机器学习后端3.1 pip安装(推荐)3.2 GitHub仓库安装 4. 后端配置4.1 yolo环境4.2 引入后端模型4.3 修改脚本4.4 启动后端 5. 标注工程5.1 创建工程5.2 配置图片路径5.3 配置工程类型标签5.4 配置模型5.…...

在HarmonyOS ArkTS ArkUI-X 5.0及以上版本中,手势开发全攻略:
在 HarmonyOS 应用开发中,手势交互是连接用户与设备的核心纽带。ArkTS 框架提供了丰富的手势处理能力,既支持点击、长按、拖拽等基础单一手势的精细控制,也能通过多种绑定策略解决父子组件的手势竞争问题。本文将结合官方开发文档,…...

mongodb源码分析session执行handleRequest命令find过程
mongo/transport/service_state_machine.cpp已经分析startSession创建ASIOSession过程,并且验证connection是否超过限制ASIOSession和connection是循环接受客户端命令,把数据流转换成Message,状态转变流程是:State::Created 》 St…...
【机器视觉】单目测距——运动结构恢复
ps:图是随便找的,为了凑个封面 前言 在前面对光流法进行进一步改进,希望将2D光流推广至3D场景流时,发现2D转3D过程中存在尺度歧义问题,需要补全摄像头拍摄图像中缺失的深度信息,否则解空间不收敛…...

AI编程--插件对比分析:CodeRider、GitHub Copilot及其他
AI编程插件对比分析:CodeRider、GitHub Copilot及其他 随着人工智能技术的快速发展,AI编程插件已成为提升开发者生产力的重要工具。CodeRider和GitHub Copilot作为市场上的领先者,分别以其独特的特性和生态系统吸引了大量开发者。本文将从功…...

爬虫基础学习day2
# 爬虫设计领域 工商:企查查、天眼查短视频:抖音、快手、西瓜 ---> 飞瓜电商:京东、淘宝、聚美优品、亚马逊 ---> 分析店铺经营决策标题、排名航空:抓取所有航空公司价格 ---> 去哪儿自媒体:采集自媒体数据进…...
论文阅读笔记——Muffin: Testing Deep Learning Libraries via Neural Architecture Fuzzing
Muffin 论文 现有方法 CRADLE 和 LEMON,依赖模型推理阶段输出进行差分测试,但在训练阶段是不可行的,因为训练阶段直到最后才有固定输出,中间过程是不断变化的。API 库覆盖低,因为各个 API 都是在各种具体场景下使用。…...