【多模态融合】SuperFusion 激光雷达与相机多层次融合 远距离高清地图预测 ICRA 2024
前言
本文介绍激光雷达与相机进行多层次融合,包括数据级融合、特征级融合和BEV级融合。
融合后的BEV特征可以支持不同的任务头,包括语义分割、实例编码和方向预测,最后进行后处理生成高清地图预测,它是来自ICRA 2024的。
会讲解论文整体思路、模型框架、论文核心点、损失函数、实验与测试效果等。
论文地址:SuperFusion: Multilevel LiDAR-Camera Fusion for Long-Range HD Map Generation
代码地址:https://github.com/haomo-ai/SuperFusion
一、模型框架
SuperFusion不仅支持30米内的短距离高清地图预测,同时还支持长达90米的长距离高清地图预测,供给下游路径规划和控制任务,提高自动驾驶的平稳性和安全性。
SuperFusion的模型框架,如下图所示:
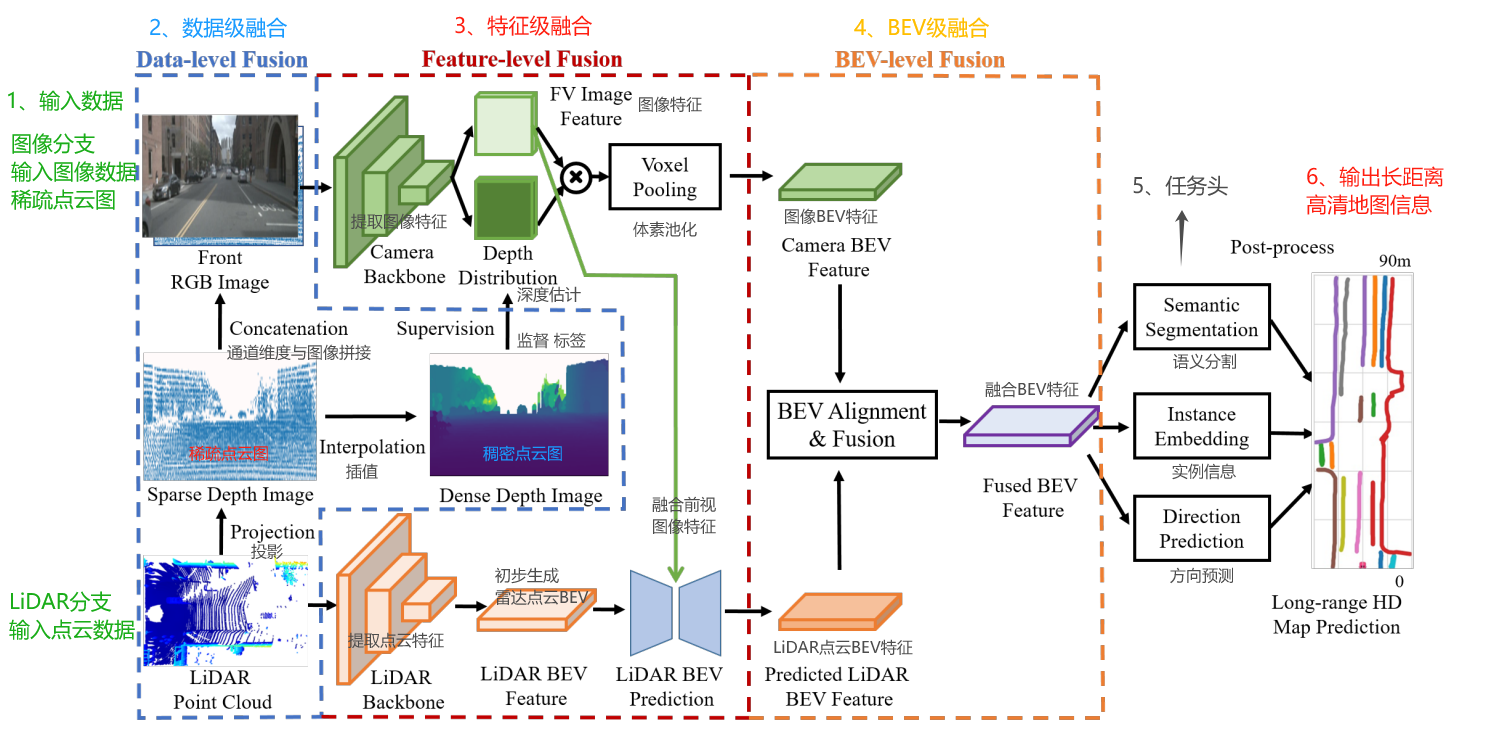
- 图像分支,输入图像数据、稀疏点云图。提取图像特征,点云特征。
- 图像分支,通过图像数据和点云特征,进行深度估计。然后通过深度特征和图像特征,生成视锥特征,经过池化处理,生成图像BEV特征。
- 激光雷达点云分支,输入点云数据,经过主干网络提取特征。
- 激光雷达点云分支,通过融合图像特征,图像引导远距离激光雷达BEV特征预测。
- BEV对齐与特征融合,将相机和激光雷达的BEV特征结合起来。
- BEV特征后面接各种任务头,比如BEV语义分割、实例检测、方向预测等。
二、多层次数据融合
原始的激光雷达和相机数据具有不同的特点
- 激光雷达数据提供准确的3D结构信息,但存在无序和稀疏的问题。
- 摄像头数据则紧凑,能够捕捉环境的更多上下文信息,但缺少深度信息。
将相机和激光雷达数据融合为三个层次,以补偿这两种模态的不足并利用它们的优点:
- 数据级融合,图像深度估计中,加入LiDAR的稀疏深度信息,提高图像深度估计的准确性
- 特征级融合,使用图像特征,通过交叉注意力机制来指导激光雷达特征,实现长距离激光雷达BEV特征的预测
- BEV级融合,将相机和激光雷达BEV特征对齐,生成融合BEV特征
三、论文主要贡献
-
多层次激光雷达-摄像头融合网络的创新设计:该设计充分利用了激光雷达和摄像头两种模态的信息,生成高质量的融合BEV特征,为不同的任务提供支持。这种多层次融合策略的核心优势在于其能够综合各种传感器提供的数据,从而在细节和准确性方面提供了质的提升。
-
首次实现长距离HD地图生成:据作者所知,他们的工作是首次实现长达90米的长距离HD地图生成。这一创新对于自动驾驶的下游规划任务具有重大意义,因为它极大地扩展了自动驾驶系统的感知和预测范围,从而有助于提高自动驾驶车辆的安全性和效率。
-
在短距离和长距离HD地图生成方面超越现有最先进方法:SuperFusion在生成高清晰度(HD)地图的短距离和长距离范围内都显著优于现有的融合方法。这一点特别重要,因为它不仅显示了该方法在技术上的进步,还证明了它在实际应用中的可行性和效用,尤其是在需要精确长距离感知的自动驾驶场景中。
-
发布代码和新数据集:作者不仅提出了一种创新的技术方法,还公开了代码和一个新的用于评估长距离HD地图生成任务的数据集。
下面是SuperFusion自采集的数据集示例,但目前还没看到公开

四、数据级融合——图像深度估计(融合点云数据)
原始的图像转为BEV视图,遵循常规LSS思想,需要对每个像素进行深度估计。
相比现有深度估计方法,LSS和CaDDN存在显著差异。
- LSS方法虽然也使用了激光雷达的深度信息,但其深度预测仅由语义分割损失隐式监督,精度不足。
- 而CaDDN虽然利用了激光雷达深度进行监督,但没有将激光雷达作为输入,限制了深度估计的鲁棒性。
SuperFusion的深度估计方法:
- 不仅使用了密集激光雷达深度图像进行监督,还将稀疏深度图作为附加通道并入RGB图像。
- 这种设计使得网络能够更有效地利用激光雷达和摄像头数据的互补信息,提高了深度估计和HD高清地图生成的准确性和可靠性。
下面是SuperFusion进行图像深度估计的要点:
-
原始数据融合:首先,在原始数据层面,通过将激光雷达数据的深度信息融合到摄像头特征中来协助特征的BEV空间映射。这一步骤通过投影3D激光雷达点云到图像平面上,生成与RGB图像对应的稀疏深度图像,解决了摄像头数据缺乏深度信息的问题。
-
图像双分支网络:摄像头端采用双分支网络设计。第一分支提取2D图像特征,第二分支则连接一个深度预测网络,估算出每个元素的深度分布。通过这种结构,能够更好地估计深度信息,为生成密集深度图提供基础。
-
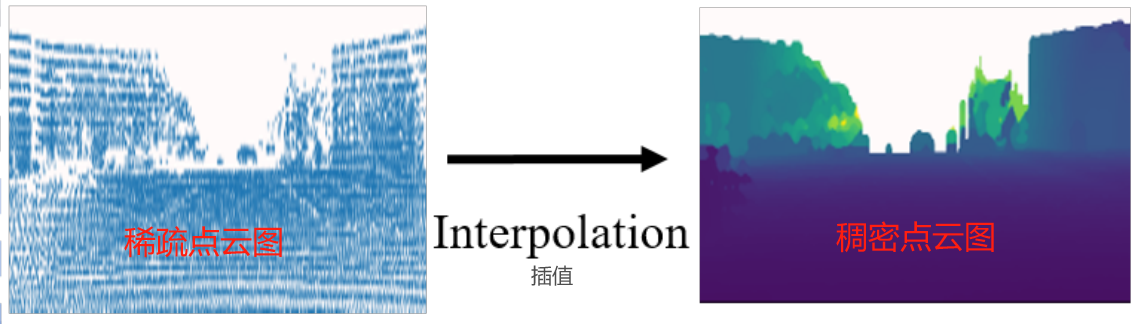
生成密集深度图作为标签:在稀疏深度图上插值生成密集深度图,此方法通过将每个像素的深度值离散化到深度分箱中,然后使用one-hot编码向量对深度预测网络进行监督,从而改善深度估计的准确性。
-
特征网格生成:最终,通过密集深度图和2D特征的外积生成最终的视锥(frustum)特征网格。这个特征网格能够支持不同的任务头,如语义分割、实例嵌入和方向预测,为生成HD高清地图预测提供数据支持。
公式版理解图像特征与深度特征融合:

- 其中,M是指最终的视锥特征网格、(u,v)是指像素位置、D是指深度分布特征、F是指图像特征。
- ⊗表示外积操作,它用于结合两个向量D和F,生成最终的视锥特征网格M。
- 外积操作允许这两个向量的信息在每个像素位置相互补充,从而产生一个包含深度和视觉特征的综合表示。
各个特征的维度:
- 图像特征

- 深度分布特征

- 视锥特征

- BEV特征

五、特征级融合——远距离激光雷达BEV特征预测(融合图像特征)
如下图所示,激光雷达通常在地面平面上具有较短的有效范围,而摄像头可以看到更远的距离。
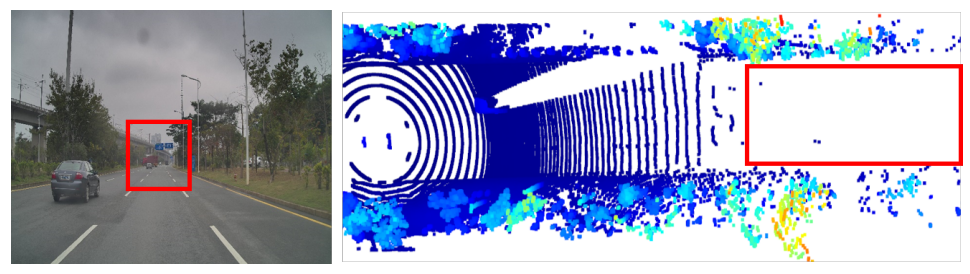
这种差异是因为激光雷达通过发射激光束,并测量反射回来的时间来确定对象的距离和形状,而摄像头通过捕捉光线形成图像,能够覆盖更大范围的视野。
通过融合图像特征,使得图像引导激光雷达远距离BEV特征预测,使用交叉注意力机制实现的。
- 激光雷达分支:用PointPillars和动态体素化作为点云编码器,生成每个点云的激光雷达BEV特征。由于激光雷达数据只包含一定范围内(通常约30米)的地面平面信息,这导致许多激光雷达BEV特征编码了大量的空白空间。
- 图像辅助预测:与激光雷达相比,摄像头能够覆盖更远的地面区域。因此,提出了一个预测模块,利用图像特征来预测激光雷达分支中未见区域的地面。这一预测模块是一个编解码器网络,通过卷积层将原始BEV特征L压缩到瓶颈特征B,然后使用交叉注意力机制来动态捕获B和前视图像特征F之间的关联。
融合的思路框架,如下图所示:

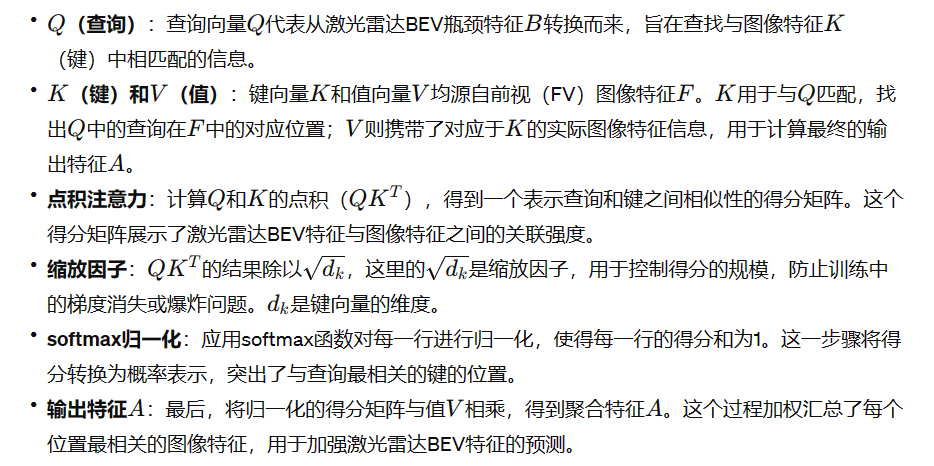
- 交叉注意力机制:用三个全连接层分别:将压缩后的LiDAR BEV特征B转换为查询Q,图像特征F转换为键K和值V。
- 然后计算Q和K的内积,表示激光雷达BEV中每个体素与其对应摄像头特征之间的相关性。
- 通过softmax操作归一化这个矩阵,然后与V相乘,得到聚合特征A。
- 特征融合:最后,将通过交叉注意力得到的聚合特征A通过卷积层处理以减少通道数,与压缩后的LiDAR BEV特征B进行拼接,再应用另一个卷积层,最终生成激光雷达BEV特征L′。
交叉注意力用公式表示为:

公式解析如下:
六、BEV级融合——多模态BEV对齐与特征融合
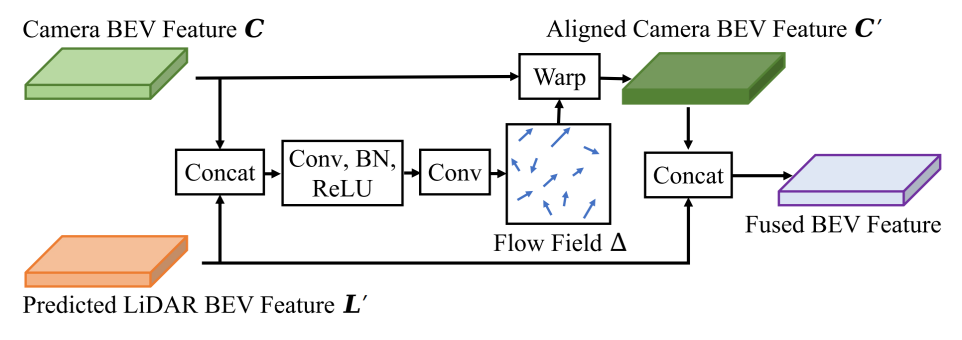
BEV对齐与特征融合的思路流程,如下图所示,将摄像头和激光雷达的BEV特征有效地结合起来,以改善长距离LiDAR BEV特征的预测。
-
输入特征:模块接收两种类型的BEV特征:摄像头BEV特征C和预测的LiDAR BEV特征L′。摄像头BEV特征来自图像特征和深度估计特征,而预测的LiDAR BEV特征则是通过之前描述的图像引导的LiDAR BEV预测方法得到的。
-
对齐的需求:由于深度估计误差和外部参数的不准确,从摄像头和激光雷达分支得到的BEV特征通常存在错位。直接连接这两种BEV特征会导致性能下降。为了解决这一问题,设计了一个BEV对齐和融合模块来改善特征的对齐,并提高整体预测性能。
-
特征对齐:使用流场Flow Field Δ来对摄像头BEV特征C进行空间变换,以对齐到LiDAR BEV特征的参考框架,生成对齐后的摄像头BEV特征C′。这一步骤是关键,因为它确保了两种类型的特征在空间上的一致性,从而使得融合更加有效。
-
特征融合:对齐后的摄像头BEV特征C′和预测的LiDAR BEV特征L′通过拼接Concat操作结合在一起,然后通过卷积层(Conv)、批标准化(BN)和ReLU激活函数处理,以融合这些特征并提取有用的信息,生成融合后的BEV特征。
-
输出:最终的融合BEV特征,可以被用作下游任务,例如语义分割、方向预测和物体检测的输入,进一步处理以生成更准确的BEV地图。
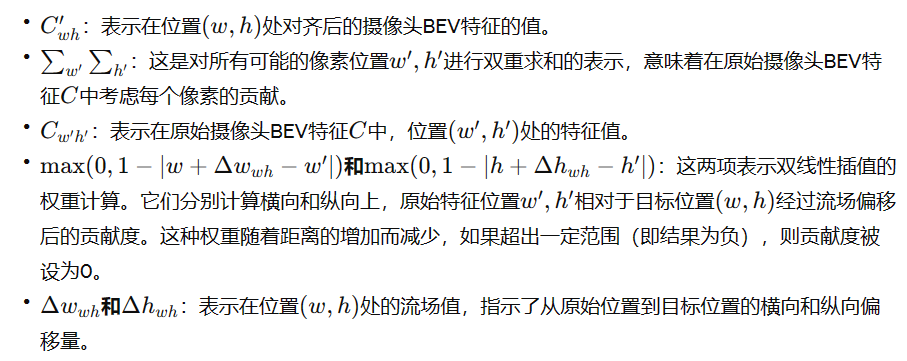
通过流场Δ对齐摄像头的BEV特征C到激光雷达的BEV特征L′,用公式表示:
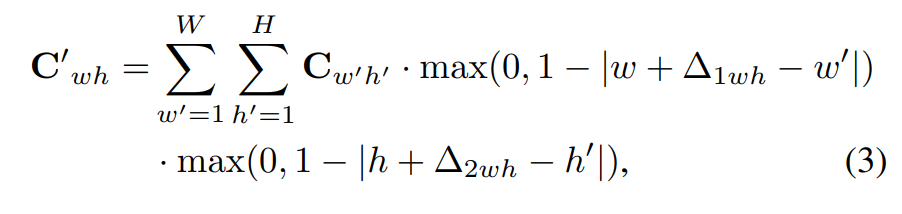
通过对每个像素位置进行变形操作来完成的,采用双线性插值的方式。
以下是公式各部分的解释:
七、损失函数
SuperFusion损失函数由四部分组成,考虑深度估计、语义分割、实例嵌入和方向预测损失。总体损失函数,如下所示:

语义分割:使用交叉熵损失来指导语义分割的学习。
方向预测:将方向分为36个等分的类别,覆盖360度,使用交叉熵损失进行优化。这种离散化处理允许模型以分类问题的形式来预测车道方向。
深度预测:采用焦点损失Focal Loss进行优化,其中γ=2.0。焦点损失用于解决深度预测中的不平衡问题,增强模型对难以预测或少数类样本的关注。
实例嵌入:实例嵌入预测的损失定义为方差损失和距离损失的组合,通过参数α和β加权。
其中,实例嵌入的损失公式如下所示:


八、模型细节信息
模型架构设计:
-
摄像头分支主干网络:采用ResNet-101作为摄像头分支的主干网络。ResNet-101是一个深度残差网络,广泛用于图像识别和处理任务中,提供了强大的特征提取能力。
-
激光雷达(LiDAR)分支骨干网络:选择PointPillars作为LiDAR分支的骨干网络。PointPillars是专门为点云数据设计的网络,能有效处理三维空间信息。
-
深度估计:对DeepLabV3进行了修改,使其能够生成像素级别的深度箱概率分布,用于深度估计。DeepLabV3是一个语义分割网络,这里的修改让它能够适应深度预测任务。
训练细节:
-
预训练与初始化:摄像头分支的DeepLabV3骨干网络使用在MS-COCO数据集上预训练的模型进行初始化,其余部分随机初始化。这有助于加速训练过程并提高模型性能。
-
图像尺寸和点云体素化:图像尺寸设置为256×704,点云数据以0.15m的分辨率体素化。这样的设置平衡了处理速度和精度。
-
BEV HD地图范围:设置BEV HD地图的范围为0,900,90m × −15,15−15,15m,对应的深度箱间隔设为2.0–90.0m,间隔为1.0m。这个范围和深度分辨率适应了车辆周围环境的观测需求。
九、实验测试与效果
在nuScenes数据集测试,下面是不同方法的高精地图预测结果。
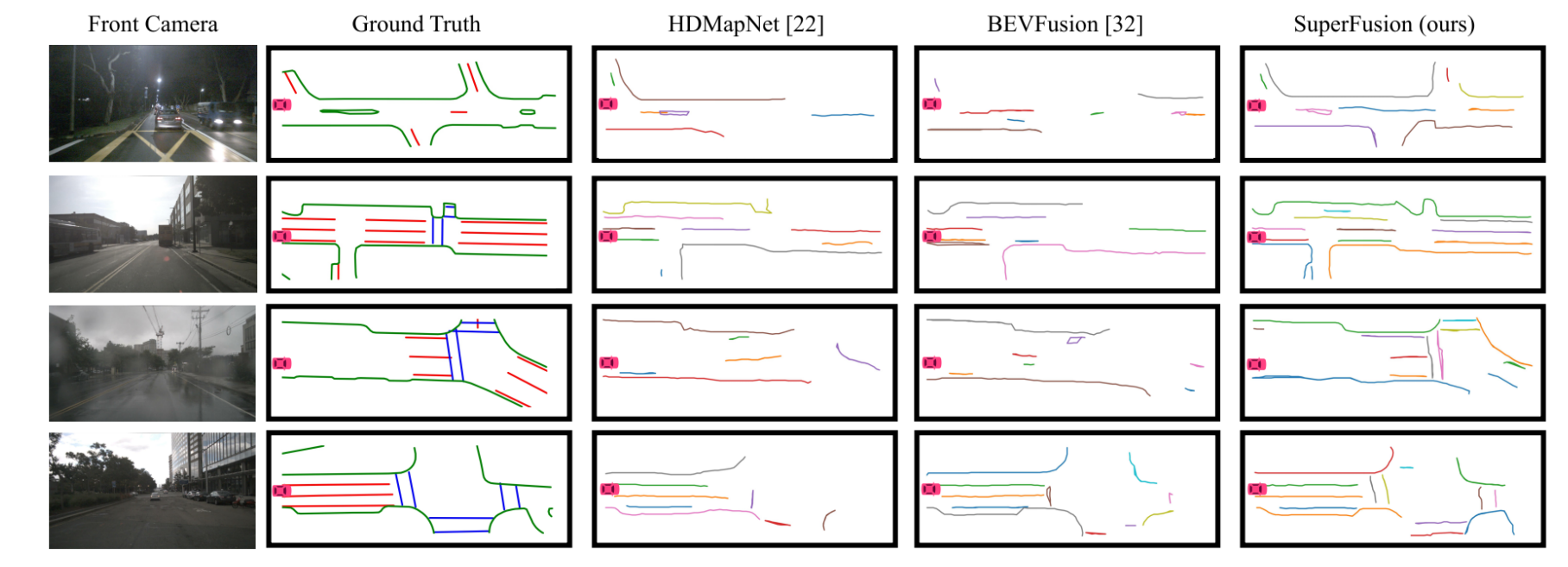
- 红色汽车代表汽车的当前位置。
- 每张地图相对于汽车的垂直长度为 90 m。
- 不同的颜色表示不同的高精地图元素实例。
- 对于地面真实高清地图,绿色是车道边界,红色是车道分隔线,蓝色是人行横道。
nuScenes 数据集上高精地图语义分割的 IoU 分数(%)

- IoU:交并比越高越好
- C:相机
- L:激光雷达
nuScenes 数据集上转动场景的高清地图生成的 IoU 分数 (%)
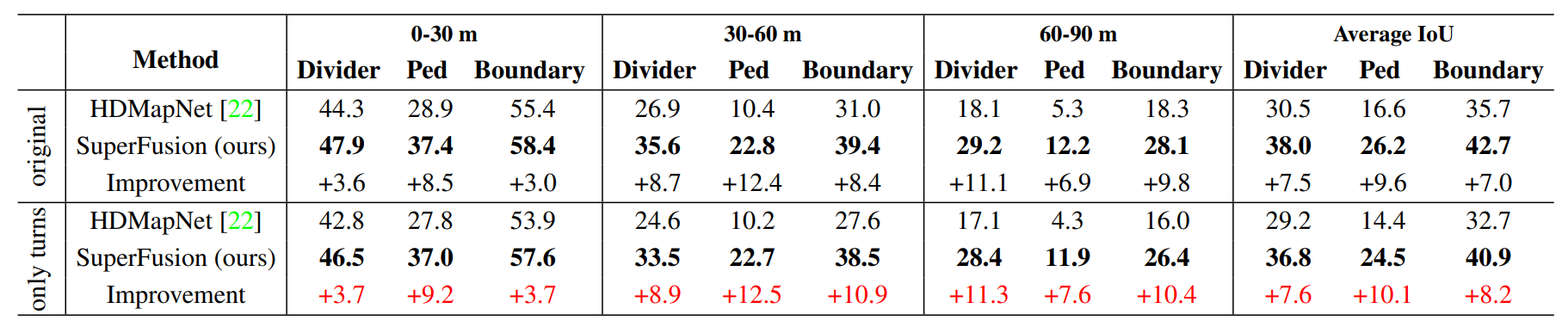
- 将 HDMapNet 和我们的结果进行比较,并显示SuperFusion的性能改进
- 粗体数字是最好的性能,红色数字表示更大的改进。
nuScenes 数据集上的实例检测结果。

- 倒角距离的预定义阈值是 1.0 m,IoU 阈值是 0.1
- 例如,当且仅当 CD 低于且 IoU 高于定义的阈值时,预测才被视为真阳性
- AP:越高越好
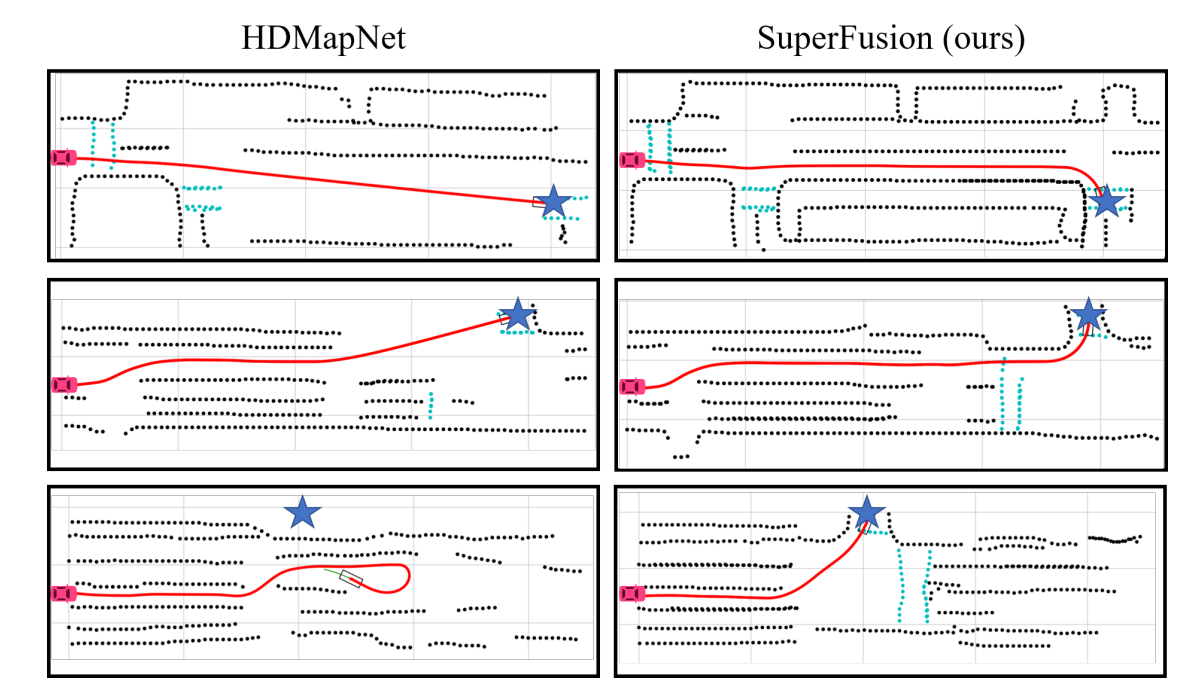
生成的高清地图上的路径规划结果:
在自采集数据集,远距离高清地图生成效果:

本文先介绍到这里,后面会分享“多模态融合”的其它数据集、算法、代码、具体应用示例。
相关文章:
【多模态融合】SuperFusion 激光雷达与相机多层次融合 远距离高清地图预测 ICRA 2024
前言 本文介绍激光雷达与相机进行多层次融合,包括数据级融合、特征级融合和BEV级融合。 融合后的BEV特征可以支持不同的任务头,包括语义分割、实例编码和方向预测,最后进行后处理生成高清地图预测,它是来自ICRA 2024的。 会讲解…...

富格林:梳理正规本领远离虚假套路
富格林悉知,黄金投资者在从事黄金交易之前,必须先了解黄金交易的风险。因为投资虽然能给你带来一定的收益,但往往也有亏损的风险。在进场后投资者可通过正规经验指导有效避免因为虚假诱导带来的异常亏损,增加安全做单盈利机会。以…...
fastadmin学习01-windows下安装部署
下载源代码 官网 安装 解压,然后使用phpstorm打开 修改配置文件 创建数据库 -- drop database fastadmin01; create database fastadmin01;这样fastadmin就部署好了 访问主页也能看到前台页面...

JAVA学习-网络编程.TCP
TCP(Transmission Control Protocol)是一种面向连接的、可靠的传输协议,它在Java网络编程中被广泛应用。TCP通信可以确保数据的可靠传输,并且具有一定的顺序性。 一、Java中实现TCP通信主要有以下几种方式: 1. Socke…...

[Android]创建Google Play内购aab白包
开发时需要调试Google内购,需要先往Google商店传一个白包上去。确定包名,然后进行内购产品创建。 1.创建一个空项目,填写正式名称和正式包名。 如果你只是为一个测试开发账号打白包,然后进行内购测试,这时包名随便写…...
大数据基础:Linux基础详解
课程介绍 本课程主要通过对linux基础课程的详细讲解,让大家熟练虚拟机的安装使用,Linux系统的安装配置,学习掌握linux系统常用命令的使用,常用的软件安装方法,制作快照,克隆,完成免密登录&…...

unity中 鼠标按下移动端与pc端的位置
if (Input.GetMouseButtonDown(0)) { Vector2 V Input.touchCount > 0 ? Input.GetTouch(0).position : new Vector2(Input.mousePosition.x, Input.mousePosition.y); } 射线检测 if (Input.GetMouseButtonDown(0)) { …...
增强现实(AR)在广告中的力量
The Power of AR in Advertising 写在前面 增强现实(AR -Augmented Reality)是指借助软件、应用程序和智能手机、平板电脑或耳机等设备,为日常生活添加视觉和音频元素的技术。如今,品牌和广告商可以在营销活动中使用AR࿰…...

日志收集监控告警平台的选型思考
目前市面上比较常见的日志收集系统有:ELK,Grafana Loki,OpenObserve,SigNoz,Graylog ,Syslog-ng,Highlight,接下来我会对这几个一一做分析。 1. ELK ELK 是 Elasticsearch、Logsta…...

苹果Find My产品需求增长迅速,伦茨科技ST17H6x芯片供货充足
苹果的Find My功能使得用户可以轻松查找iPhone、Mac、AirPods以及Apple Watch等设备。如今Find My还进入了耳机、充电宝、箱包、电动车、保温杯等多个行业。苹果发布AirTag发布以来,大家都更加注重物品的防丢,苹果的 Find My 就可以查找 iPhone、Mac、Ai…...
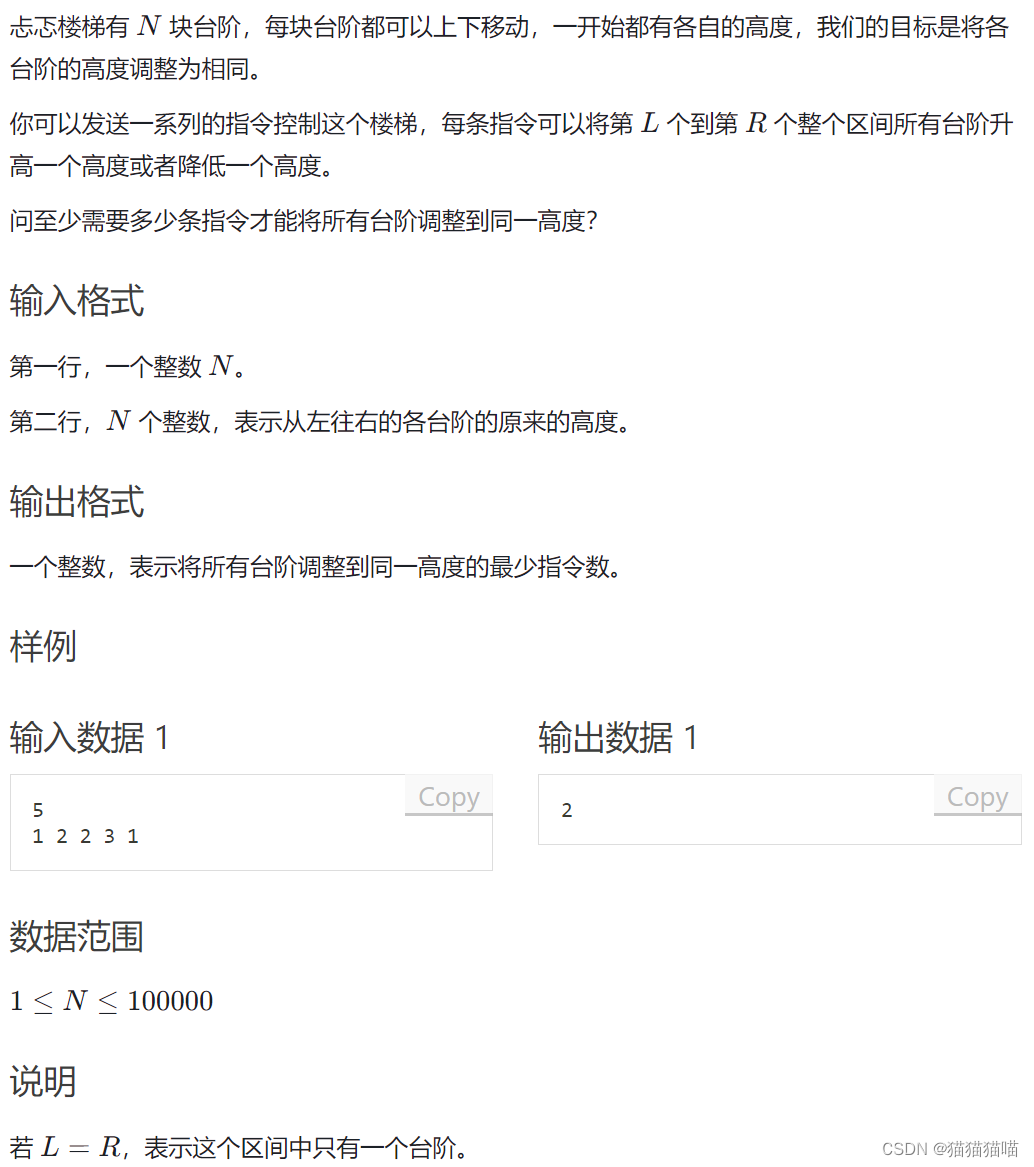
题目:忐忑楼梯Ⅱ
问题描述: 解题思路: 利用差分,当第一个以后的差分元素都为零时就代表楼梯高度等于第一个楼梯的高度。为什么是第一个呢,因为以第一个为标准的区间操作数最少。 注意点:每次都只能加一或减一,ans开ll 题解&…...
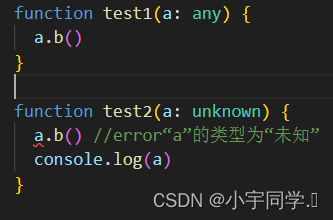
TS函数类型
函数类型表达式 function hello(x: string) {console.log(x) } //greeter函数的参数是一个函数fn,fn也有一个string类型参数,无返回值。 function greeter(fn: (a: string) > void) {fn(hello) } greeter(hello)也可以把定义参数类型的语句单独提取出…...
:数据链路层协议)
数据链路层(四):数据链路层协议
目录 1 数据链路层协议1.1 异步协议1.2 同步协议1.3 局域网数据链路层协议1.4 广域网数据链路层协议 1 数据链路层协议 数据链路层“协议”也称为“规程”,数据链路控制协议也称数据链路控制规程。 数据链路控制协议主要分为异步协议和同步协议两大类。 1.1 异步协…...

#Linux系统编程(孤儿进程及僵尸进程以及wait函数)
(一)发行版:Ubuntu16.04.7 (二)记录: (1)概述 在 Unix/Linux 系统中,正常情况下,子进程是通过父进程创建的,且两者的运行是相互独立的ÿ…...

苍穹外卖项目-01(开发流程,介绍,开发环境搭建,nginx反向代理,Swagger)
目录 一、软件开发整体介绍 1. 软件开发流程 1 第1阶段: 需求分析 2 第2阶段: 设计 3 第3阶段: 编码 4 第4阶段: 测试 5 第5阶段: 上线运维 2. 角色分工 3. 软件环境 1 开发环境(development) 2 测试环境(testing) 3 生产环境(production) 二、苍穹外卖项目介绍 …...
函数防抖和节流)
学习笔记(16)函数防抖和节流
JavaScript 中的函数防抖(Debounce)和函数节流(Throttle)是两种优化频繁触发事件回调函数执行的技术,它们主要用于限制函数调用的频率,尤其是在处理高频率触发且响应开销较大的用户交互场景时。 函数防抖 …...

【揭秘】空号检测平台挑选秘籍:让每一分钱都花在“刀刃”上
在数字化营销时代,精准的数据是企业制胜的关键。而空号检测平台作为数据清洗的重要工具,其选择的正确与否直接影响到营销效果与成本效益。如何在众多平台中慧眼识珠,找到最适合自己的“黄金搭档”?今天,就跟着企讯通一…...
Linux源码包安装
目录 一、transmission源码包安装 二、 nginx源码包安装 一、transmission源码包安装 1、下载编译环境所需的软件包依赖 2、下载transmision源码包到用户主目录下 https://github.com/transmission/transmission/releases/download/4.0.5/transmission-4.0.5.tar.xz 3、解压…...
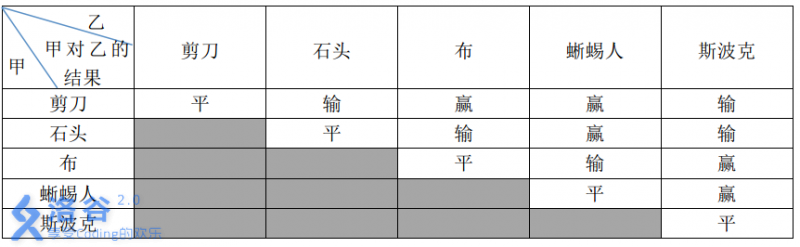
【P1328】[NOIP2014 提高组] 生活大爆炸版石头剪刀布
[NOIP2014 提高组] 生活大爆炸版石头剪刀布 题目背景 NOIP2014 提高组 D1T1 题目描述 石头剪刀布是常见的猜拳游戏:石头胜剪刀,剪刀胜布,布胜石头。如果两个人出拳一样,则不分胜负。在《生活大爆炸》第二季第 8 集中出现了一种…...

查看k8s中的secret
kubectl get secret xxx -o yaml -n xxxx参考: Managing Secrets using kubectl...

springboot 百货中心供应链管理系统小程序
一、前言 随着我国经济迅速发展,人们对手机的需求越来越大,各种手机软件也都在被广泛应用,但是对于手机进行数据信息管理,对于手机的各种软件也是备受用户的喜爱,百货中心供应链管理系统被用户普遍使用,为方…...

论文浅尝 | 基于判别指令微调生成式大语言模型的知识图谱补全方法(ISWC2024)
笔记整理:刘治强,浙江大学硕士生,研究方向为知识图谱表示学习,大语言模型 论文链接:http://arxiv.org/abs/2407.16127 发表会议:ISWC 2024 1. 动机 传统的知识图谱补全(KGC)模型通过…...
前端开发面试题总结-JavaScript篇(一)
文章目录 JavaScript高频问答一、作用域与闭包1.什么是闭包(Closure)?闭包有什么应用场景和潜在问题?2.解释 JavaScript 的作用域链(Scope Chain) 二、原型与继承3.原型链是什么?如何实现继承&a…...

#Uniapp篇:chrome调试unapp适配
chrome调试设备----使用Android模拟机开发调试移动端页面 Chrome://inspect/#devices MuMu模拟器Edge浏览器:Android原生APP嵌入的H5页面元素定位 chrome://inspect/#devices uniapp单位适配 根路径下 postcss.config.js 需要装这些插件 “postcss”: “^8.5.…...
CSS | transition 和 transform的用处和区别
省流总结: transform用于变换/变形,transition是动画控制器 transform 用来对元素进行变形,常见的操作如下,它是立即生效的样式变形属性。 旋转 rotate(角度deg)、平移 translateX(像素px)、缩放 scale(倍数)、倾斜 skewX(角度…...

Vite中定义@软链接
在webpack中可以直接通过符号表示src路径,但是vite中默认不可以。 如何实现: vite中提供了resolve.alias:通过别名在指向一个具体的路径 在vite.config.js中 import { join } from pathexport default defineConfig({plugins: [vue()],//…...

数据库正常,但后端收不到数据原因及解决
从代码和日志来看,后端SQL查询确实返回了数据,但最终user对象却为null。这表明查询结果没有正确映射到User对象上。 在前后端分离,并且ai辅助开发的时候,很容易出现前后端变量名不一致情况,还不报错,只是单…...
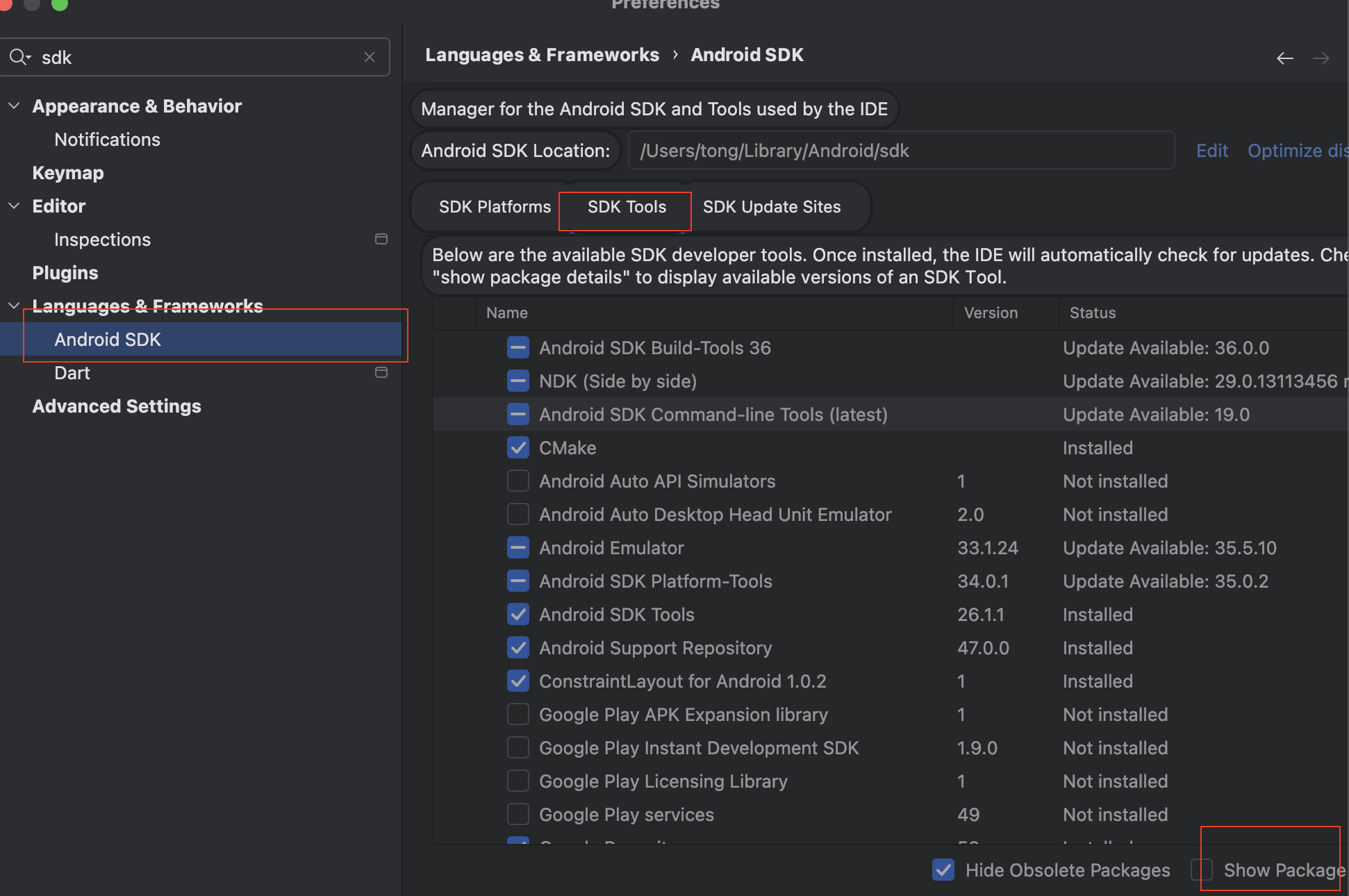
Mac flutter环境搭建
一、下载flutter sdk 制作 Android 应用 | Flutter 中文文档 - Flutter 中文开发者网站 - Flutter 1、查看mac电脑处理器选择sdk 2、解压 unzip ~/Downloads/flutter_macos_arm64_3.32.2-stable.zip \ -d ~/development/ 3、添加环境变量 命令行打开配置环境变量文件 ope…...

UE5 音效系统
一.音效管理 音乐一般都是WAV,创建一个背景音乐类SoudClass,一个音效类SoundClass。所有的音乐都分为这两个类。再创建一个总音乐类,将上述两个作为它的子类。 接着我们创建一个音乐混合类SoundMix,将上述三个类翻入其中,通过它管理每个音乐…...

Java中栈的多种实现类详解
Java中栈的多种实现类详解:Stack、LinkedList与ArrayDeque全方位对比 前言一、Stack类——Java最早的栈实现1.1 Stack类简介1.2 常用方法1.3 优缺点分析 二、LinkedList类——灵活的双端链表2.1 LinkedList类简介2.2 常用方法2.3 优缺点分析 三、ArrayDeque类——高…...