OAK深度相机使用不同镜头和本地视频流进行模型推理
编辑:OAK中国
首发:oakchina.cn
喜欢的话,请多多👍⭐️✍
内容可能会不定期更新,官网内容都是最新的,请查看首发地址链接。
▌前言
Hello,大家好,这里是OAK中国,我是助手君。
最近朋友们有几条共性的问题,比如:
- 为啥检测框在深度图位置不对啊?
- 能不能将本地视频流作为输入啊?
- 能不能加上测距啊?
这篇博客总结了所有这些问题的参考代码,欢迎三连食用~
使用 oak 的
LEFT,RIGHT和RGB相机和视频流VIDEO进行 YOLO 检测
▌RGB
使用 RGB 相机作为输入源
...
camRgb = pipeline.create(dai.node.ColorCamera)
detectionNetwork = pipeline.create(dai.node.YoloDetectionNetwork)
...
camRgb.setPreviewSize(W, H)
...
camRgb.preview.link(detectionNetwork.input)
...
详见:yolov6-rgb.py
▌RGB + DEPTH
使用 RGB 相机作为输入源,并附加深度信息
...
camRgb = pipeline.create(dai.node.ColorCamera)
spatialDetectionNetwork = pipeline.create(dai.node.YoloSpatialDetectionNetwork)
monoLeft = pipeline.create(dai.node.MonoCamera)
monoRight = pipeline.create(dai.node.MonoCamera)
stereo = pipeline.create(dai.node.StereoDepth)
...
camRgb.setPreviewSize(W, H)
...
monoLeft.setBoardSocket(dai.CameraBoardSocket.LEFT)
monoRight.setBoardSocket(dai.CameraBoardSocket.RIGHT)
...
# 将深度图与 RGB 相机的视角对齐,在其上进行推理
stereo.setDepthAlign(dai.CameraBoardSocket.RGB)
stereo.setOutputSize(monoLeft.getResolutionWidth(), monoLeft.getResolutionHeight())
...
monoLeft.out.link(stereo.left)
monoRight.out.link(stereo.right)camRgb.preview.link(spatialDetectionNetwork.input)
stereo.depth.link(spatialDetectionNetwork.inputDepth)
...
详见:yolov6-rgb-spatial.py
▌RIGHT
使用 RIGHT 相机作为输入源
...
monoRight = pipeline.create(dai.node.MonoCamera)
detectionNetwork = pipeline.create(dai.node.YoloDetectionNetwork)
imageManip = pipeline.create(dai.node.ImageManip)
...
monoRight.setBoardSocket(dai.CameraBoardSocket.RIGHT)
...
# NN 模型需要 BGR 输入。默认情况下 ImageManip 输出类型与输入相同(在本例中为灰色)
imageManip.initialConfig.setFrameType(dai.ImgFrame.Type.BGR888p)
imageManip.initialConfig.setResize(W, H)
imageManip.setMaxOutputFrameSize(W * H * 3)
...
monoRight.out.link(imageManip.inputImage)
imageManip.out.link(detectionNetwork.input)
...
详见:yolov6-right.py
▌RIGHT + DEPTH
使用 RIGHT 相机作为输入源,并附加深度信息
...
monoLeft = pipeline.create(dai.node.MonoCamera)
monoRight = pipeline.create(dai.node.MonoCamera)
spatialDetectionNetwork = pipeline.create(dai.node.YoloSpatialDetectionNetwork)
stereo = pipeline.create(dai.node.StereoDepth)
imageManip = pipeline.create(dai.node.ImageManip)
...
monoLeft.setBoardSocket(dai.CameraBoardSocket.LEFT)
monoRight.setBoardSocket(dai.CameraBoardSocket.RIGHT)
...
# NN 模型需要 BGR 输入。默认情况下 ImageManip 输出类型与输入相同(在本例中为灰色)
imageManip.initialConfig.setFrameType(dai.ImgFrame.Type.BGR888p)
imageManip.initialConfig.setResize(W, H)
imageManip.setMaxOutputFrameSize(W * H * 3)
...
# 将深度图与 RIGHT 相机的视角对齐,在其上进行推理
stereo.setDepthAlign(dai.RawStereoDepthConfig.AlgorithmControl.DepthAlign.RECTIFIED_RIGHT
)
stereo.setOutputSize(monoLeft.getResolutionWidth(), monoLeft.getResolutionHeight())
...
monoLeft.out.link(stereo.left)
monoRight.out.link(stereo.right)imageManip.out.link(spatialDetectionNetwork.input)stereo.rectifiedRight.link(imageManip.inputImage)
stereo.depth.link(spatialDetectionNetwork.inputDepth)
...
详见:yolov6-right-spatial.py
▌LEFT
使用 LEFT 相机作为输入源
...
monoLeft = pipeline.create(dai.node.MonoCamera)
detectionNetwork = pipeline.create(dai.node.YoloDetectionNetwork)
imageManip = pipeline.create(dai.node.ImageManip)
...
monoLeft.setBoardSocket(dai.CameraBoardSocket.LEFT)
...
# NN 模型需要 BGR 输入。默认情况下 ImageManip 输出类型与输入相同(在本例中为灰色)
imageManip.initialConfig.setFrameType(dai.ImgFrame.Type.BGR888p)
imageManip.initialConfig.setResize(W, H)
imageManip.setMaxOutputFrameSize(W * H * 3)
...
monoLeft.out.link(imageManip.inputImage)
imageManip.out.link(detectionNetwork.input)
...
详见:yolov6-left.py
▌LEFT + DEPTH
使用 LEFT 相机作为输入源,并附加深度信息
...
monoLeft = pipeline.create(dai.node.MonoCamera)
monoRight = pipeline.create(dai.node.MonoCamera)
spatialDetectionNetwork = pipeline.create(dai.node.YoloSpatialDetectionNetwork)
stereo = pipeline.create(dai.node.StereoDepth)
imageManip = pipeline.create(dai.node.ImageManip)
...
monoLeft.setBoardSocket(dai.CameraBoardSocket.LEFT)
monoRight.setBoardSocket(dai.CameraBoardSocket.RIGHT)
...
# NN 模型需要 BGR 输入。默认情况下 ImageManip 输出类型与输入相同(在本例中为灰色)
imageManip.initialConfig.setFrameType(dai.ImgFrame.Type.BGR888p)
imageManip.initialConfig.setResize(W, H)
imageManip.setMaxOutputFrameSize(W * H * 3)
...
# 将深度图与 LEFT 相机的视角对齐,在其上进行推理
stereo.setDepthAlign(dai.RawStereoDepthConfig.AlgorithmControl.DepthAlign.RECTIFIED_LEFT
)
stereo.setOutputSize(monoLeft.getResolutionWidth(), monoLeft.getResolutionHeight())
...
monoLeft.out.link(stereo.left)
monoRight.out.link(stereo.right)
imageManip.out.link(spatialDetectionNetwork.input)
stereo.rectifiedLeft.link(imageManip.inputImage)
stereo.depth.link(spatialDetectionNetwork.inputDepth)
...
详见:yolov6-left-spatial.py
▌VIDEO
使用 VIDEO 作为输入源
...
xinFrame = pipeline.create(dai.node.XLinkIn)
detectionNetwork = pipeline.create(dai.node.YoloDetectionNetwork)
...
xinFrame.setStreamName("inFrame")
...
xinFrame.out.link(detectionNetwork.input)
...
# 输入队列将用于将视频帧发送到设备。
inFrameQueue = device.getInputQueue(name="inFrame")
...
img = dai.ImgFrame()
img.setData(to_planar(frame, (W, H)))
img.setTimestamp(monotonic())
img.setWidth(W)
img.setHeight(H)
inFrameQueue.send(img)
...
详见:yolov6-video.py
▌参考资料
https://docs.oakchina.cn/en/latest/
https://www.oakchina.cn/selection-guide/
OAK中国
| OpenCV AI Kit在中国区的官方代理商和技术服务商
| 追踪AI技术和产品新动态
戳「+关注」获取最新资讯↗↗
相关文章:

OAK深度相机使用不同镜头和本地视频流进行模型推理
编辑:OAK中国 首发:oakchina.cn 喜欢的话,请多多👍⭐️✍ 内容可能会不定期更新,官网内容都是最新的,请查看首发地址链接。 ▌前言 Hello,大家好,这里是OAK中国,我是助手…...
[项目] Boost搜索引擎
目录 1.项目相关背景 2.项目宏观原理 3.技术栈和项目环境 4.正排索引&&倒排索引 5.去标签与数据清洗 6.构建索引模块Index 6.1正排索引 6.2 建立倒排 jiebacpp使用 建立分词 7.搜索引擎模块Searcher Jsoncpp -- 通过jsoncpp进行序列化和反序列化 处理Cont…...
解决新版QGIS找不到Georeferencer插件
目录1. 问题分析1.1 去 Raster 找,没找到1.2 去插件搜,未搜到1.3 插件库里也搜不到2. 解决办法在 QGIS 3.30中,按常规办法,找不到 Georeferencer插件,它并没有被安装,在库中也找不到它, 请问问题…...
c---冒泡排序模拟qsort
一、冒泡排序 二、冒泡排序优化排各种类型数据 文章目录一、冒泡排序二、冒泡排序优化排各种类型数据冒泡排序 冒泡排序原理:两两相邻元素进行比较 初级版 void bulle_sort(int* a, int sz) {int i 0;for (int i 0; i < sz-1; i){int j 0; for (j 0; j…...
JS)
Java知识复习(十四)JS
1、数据类型 基本数据类型:null、undefinde、boolean、string、number、symbol(ES6新增)引用数据类型:Function、Array、Object、Map和Set(ES6新增) 2、let、var和const的区别 var定义的变量,…...

代码随想录刷题-数组-移除元素
文章目录写在前面习题我的想法暴力解法双指针写在前面 本节对应代码随想录中:代码随想录 习题 题目链接: 27. 移除元素- 力扣(LeetCode) 给你一个数组 nums 和一个值 val,你需要原地移除所有数值等于 val 的元素&a…...

聚观早报 |拼多多跨境电商业务正式登陆澳洲;中国加快6G网络研发
今日要闻:拼多多跨境电商业务正式登陆澳洲;全球自动驾驶公司排名特斯拉垫底;中国将加快 6G 网络研发;B站再次“崩”上热搜!已闪电修复;微软将必应AI聊天每次对话上限增加至8条拼多多跨境电商业务正式登陆澳…...

MDK Keil5 创建Stm32工程-理论篇(这里以Stm32F103Zet6为例)
一、文件夹创建与文件说明整个工程可以粗略的划分为几个文件夹:BSP底层驱动比如GPIO\Timer等驱动文件CMSIS内核相关的文件Firmware生成的固件下载文件Mycode用户编写的相关文件,主要编写的文件都在这个文件夹里Project工程文件startup芯片启动文件STM32F…...

应届大学生学什么技术好?哪些技术适合年轻人?
到了毕业季,应届大学生面临的就是就业问题,很多专业的大学生难以找到对口的工作,或是不得已随便就业,或者是学个技术高薪就业,那么,问题来了,应届大学生学什么技术好?哪些技术适合年…...
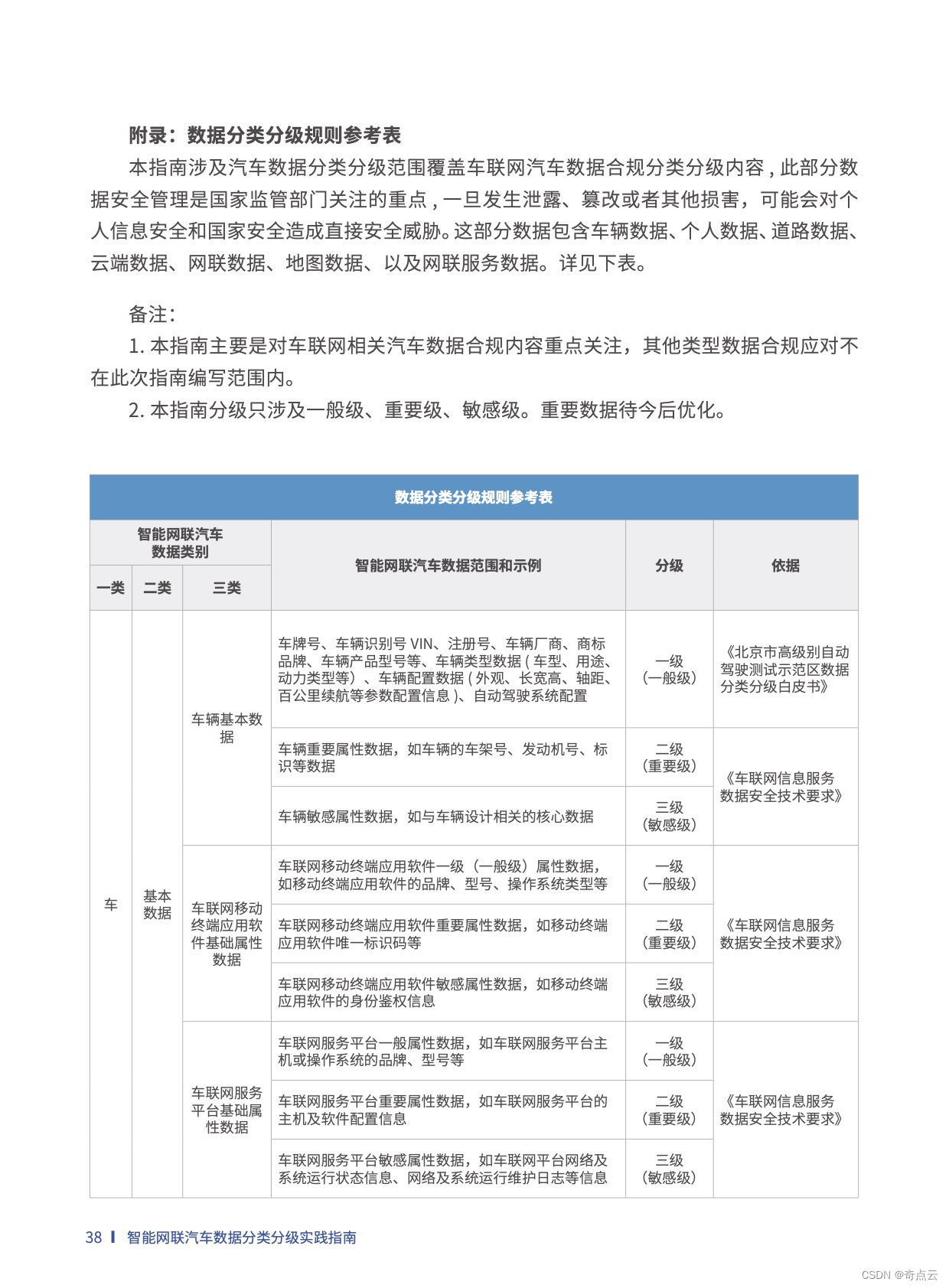
车企数据分类分级的实践指南出炉!“数据安全推进计划”发布,奇点云参编
日前,“数据安全推进计划”(DSI)正式发布《智能网联汽车数据分类分级实践指南》(下文简称“指南”),旨在以合规为主要导向,明确智能网联汽车数据分类分级的方法论,为数据全生命周期的…...
Nginx学习 (2) —— 虚拟主机配置
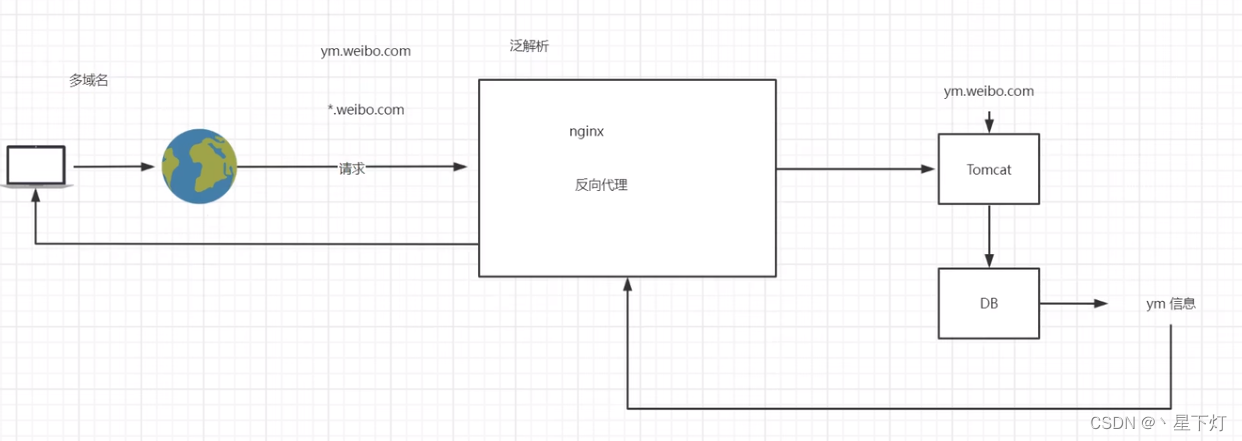
文章目录虚拟主机原理域名解析与泛域名解析(实践)配置文件中ServerName的匹配规则技术架构多用户二级域名短网址虚拟主机原理 为什么需要虚拟主机: 当一台主机充当服务器给用户提供资源的时候,并不是一直都有很大的用户量&#…...

Java 动态代理简述和实例
Java动态代理是一种在运行时动态创建代理对象的技术。它可以让我们在不修改原始代码的情况下,对原始对象进行增强或者添加额外的行为。这种代理方式可以用于很多场景,例如AOP编程、RPC框架等。动态代理是基于Java反射机制实现的,它允许程序在…...

Unity编译器扩展(Advanced Editor Scripting)
Untiy编译器扩展允许我们对编译器的增加自己编写的的功能菜单栏MenuItemContextMenu和ContextMenuItemContextMenuContextMenuItemMenuItem 该属性允许您将菜单项添加到主菜单和检查器窗口上下文菜单。 该属性将任何静态函数转换为菜单命令。只有静态函数可以使用该属性。 Men…...

AFR机制及流程介绍
AFR(Auto Fast Return)不符合3GPP协议标准,因此终端默认是disable状态。如果运营商有要求可以配置开启。 AFR有两种场景 2G或者3G AFR到4G4G AFR到5G3G AFR TO 4G AFR到LTE功能的作用就是终端从LTE Handover或者重定向到3G进行业务,等业务做完后能够快速回到LTE网络。...

9.Hbase 部署
9.Hbase部署 注意事项: 1:必须事先安装 Hadoop分布式集群,zookeeper分布式集群 2:查看版本号: hbase version1、解压文件并改名 tar -zxvf /opt/software/hbase-2.2.3-bin.tar.gz -C /usr/app/ mv hbase-2.2.3/ hba…...

【maven 学习记录】
maven 学习记录一、maven基础1. maven是什么2. maven的作用3. maven的下载安装4. maven仓库5. maven坐标6. 第一个maven项目 手工实现7. maven插件8. 依赖管理9. 生命周期二、maven进阶一、maven基础 1. maven是什么 maven的本质是一个项目管理工具,将项目开发和管…...

NB-IOT宣传这么多年,这次总算用好了吧
一、方案概述随着实体经济快速发展,石化、港口、货场、工地等区域规模日益扩大,厂区面积广阔、环境复杂、作业人员和车辆众多,如无法实时掌握工作人员状态及外来人员位置、外来车辆情况等问题,将存在非常大的安全隐患。今天小编介…...

sort函数对结构体|pair对组|vector容器|map排序|二维数组的第x列 的排序
目录 sort对 vector容器 sort对 vector<pair<int,int>>对组 sort对 结构体 结构体外部规定排序 结构体内部运算符重载 map容器的排序 map的键排序 map的值排序 sort对二维数组的排序 sort对 vector容器 sort()函数可以用于对vector容器进行排序。具体来…...
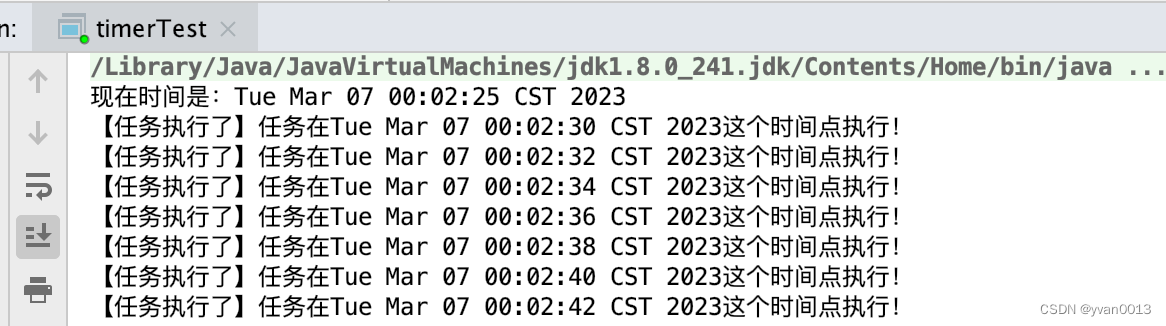
Java定时器Timer的使用
一、Timer常用方法 Timer应用场景: 1、每隔一段时间执行指定的代码逻辑(即按周期执行任务) 2、指定时间执行指定的代码逻辑 为方便测试并查看运行效果,首先先建一个类并继承TimerTask,代码如下: package timerTest…...

MySQL安装和配置
下载官网下载mysql解压版本:配置环境变量下载完成后直接解压到需要放的文件夹,根据文件夹来配置环境变量;新建系统变量,变量名自取,值是MySQL的目录编辑path环境变量,加上MySQL的bin目录 %MYSQL_HOME%\bin配…...

XML Group端口详解
在XML数据映射过程中,经常需要对数据进行分组聚合操作。例如,当处理包含多个物料明细的XML文件时,可能需要将相同物料号的明细归为一组,或对相同物料号的数量进行求和计算。传统实现方式通常需要编写脚本代码,增加了开…...
国防科技大学计算机基础课程笔记02信息编码
1.机内码和国标码 国标码就是我们非常熟悉的这个GB2312,但是因为都是16进制,因此这个了16进制的数据既可以翻译成为这个机器码,也可以翻译成为这个国标码,所以这个时候很容易会出现这个歧义的情况; 因此,我们的这个国…...

04-初识css
一、css样式引入 1.1.内部样式 <div style"width: 100px;"></div>1.2.外部样式 1.2.1.外部样式1 <style>.aa {width: 100px;} </style> <div class"aa"></div>1.2.2.外部样式2 <!-- rel内表面引入的是style样…...
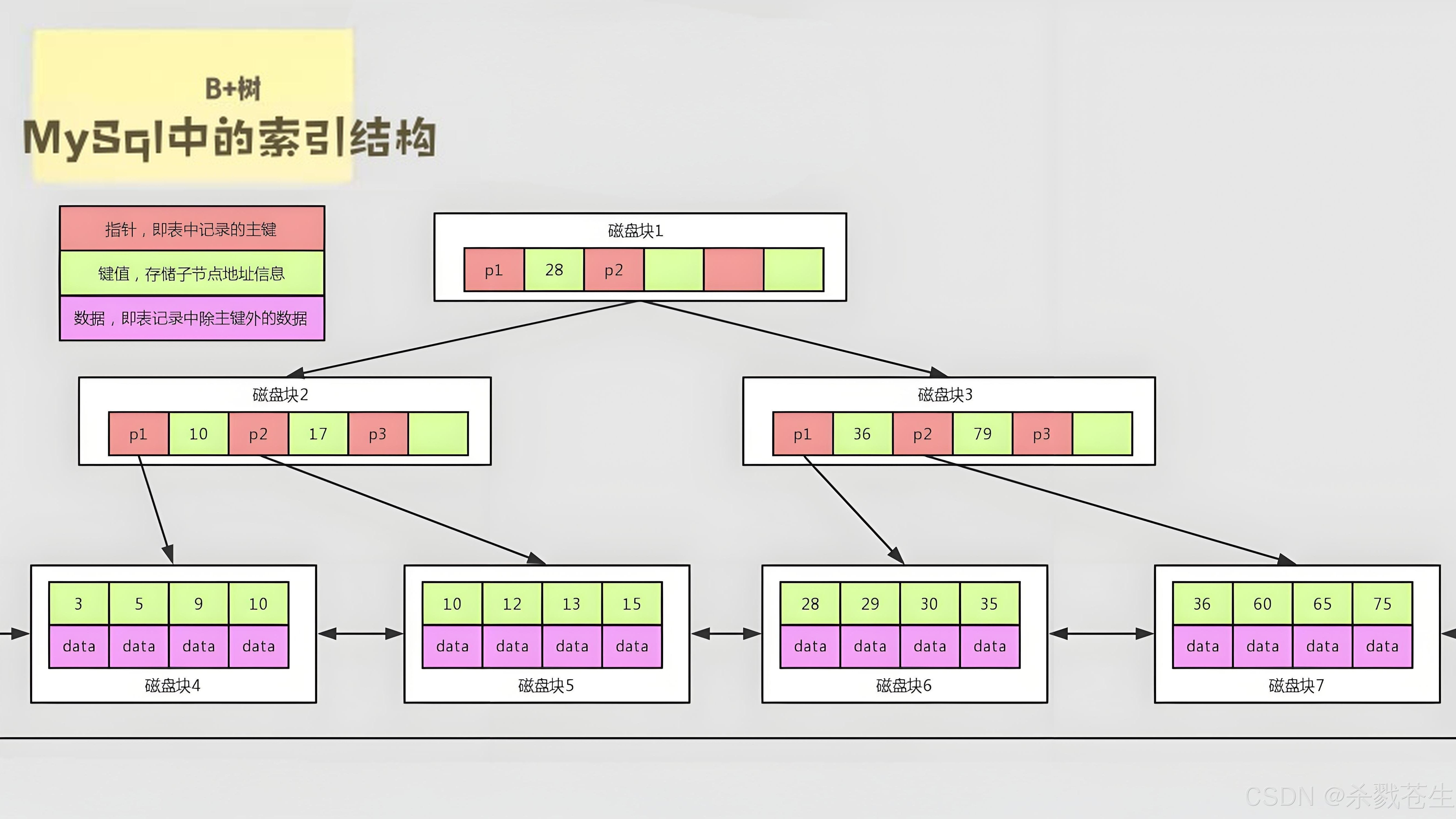
ElasticSearch搜索引擎之倒排索引及其底层算法
文章目录 一、搜索引擎1、什么是搜索引擎?2、搜索引擎的分类3、常用的搜索引擎4、搜索引擎的特点二、倒排索引1、简介2、为什么倒排索引不用B+树1.创建时间长,文件大。2.其次,树深,IO次数可怕。3.索引可能会失效。4.精准度差。三. 倒排索引四、算法1、Term Index的算法2、 …...
 自用)
css3笔记 (1) 自用
outline: none 用于移除元素获得焦点时默认的轮廓线 broder:0 用于移除边框 font-size:0 用于设置字体不显示 list-style: none 消除<li> 标签默认样式 margin: xx auto 版心居中 width:100% 通栏 vertical-align 作用于行内元素 / 表格单元格ÿ…...
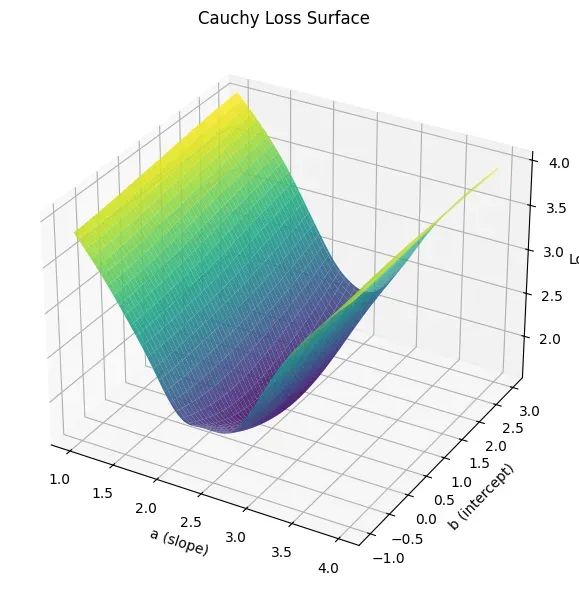
让回归模型不再被异常值“带跑偏“,MSE和Cauchy损失函数在噪声数据环境下的实战对比
在机器学习的回归分析中,损失函数的选择对模型性能具有决定性影响。均方误差(MSE)作为经典的损失函数,在处理干净数据时表现优异,但在面对包含异常值的噪声数据时,其对大误差的二次惩罚机制往往导致模型参数…...

Java数值运算常见陷阱与规避方法
整数除法中的舍入问题 问题现象 当开发者预期进行浮点除法却误用整数除法时,会出现小数部分被截断的情况。典型错误模式如下: void process(int value) {double half = value / 2; // 整数除法导致截断// 使用half变量 }此时...
基于Java+VUE+MariaDB实现(Web)仿小米商城
仿小米商城 环境安装 nodejs maven JDK11 运行 mvn clean install -DskipTestscd adminmvn spring-boot:runcd ../webmvn spring-boot:runcd ../xiaomi-store-admin-vuenpm installnpm run servecd ../xiaomi-store-vuenpm installnpm run serve 注意:运行前…...

掌握 HTTP 请求:理解 cURL GET 语法
cURL 是一个强大的命令行工具,用于发送 HTTP 请求和与 Web 服务器交互。在 Web 开发和测试中,cURL 经常用于发送 GET 请求来获取服务器资源。本文将详细介绍 cURL GET 请求的语法和使用方法。 一、cURL 基本概念 cURL 是 "Client URL" 的缩写…...

破解路内监管盲区:免布线低位视频桩重塑停车管理新标准
城市路内停车管理常因行道树遮挡、高位设备盲区等问题,导致车牌识别率低、逃费率高,传统模式在复杂路段束手无策。免布线低位视频桩凭借超低视角部署与智能算法,正成为破局关键。该设备安装于车位侧方0.5-0.7米高度,直接规避树枝遮…...