OpenHarmony无人机MAVSDK开源库适配方案分享
MAVSDK 是 PX4 开源团队贡献的基于 MavLink 通信协议的用于无人机应用开发的 SDK,支持多种语言如 C/C++、python、Java 等。通常用于无人机间、地面站与通信设备的消息传输。
MAVLink 是一种非常轻量级的消息传递协议,用于与无人机(以及机载无人机组件之间)进行通信。MAVLink 遵循现代混合发布-订阅和点对点设计模式,数据流作为主题发送/发布,而任务协议或参数协议等配置子协议是点对点的重传。其中 MAVLink 1 每个数据包只有 8 个字节的开销,包括开始标志和数据包丢弃检测。MAVLink 2 只有 14 字节的开销。由于 MAVLink 不需要任何额外的成帧,因此非常适合通信带宽非常有限的应用程序。
当我们想要在 OpenHarmony 上做无人机相关工作时,在通信方面需要面临 MAVLink 的移植适配工作。因此接下来我们将分享如何将 MAVSDK 移植至 OpenHarmony 系统当中。
MAVSDK Github 开源地址:GitHub - mavlink/MAVSDK: API and library for MAVLink compatible systems written in C++17
接下来讲解如何把 MAVSDK 开源库添加至 OpenHarmony 工程中进行编译。(此方法与其他开源库移植方法基本一致)
本次移植通过新建子系统 mavsdk,在子系统下添加名为 mavsdk 的组件,并在该组件下添加名为 MAVSDK 的模块,OpenHarmony 系统层级顺序如下:子系统-> 组件-> 模块,下文中将都以此为顺序进行叙述。
表 1:添加到工程后的目录结构
| 路径 | 描述 |
|---|---|
| ohos/build/subsystem_config.json | 子系统配置 |
| ohos/productdefine/common/products/ohos-arm64.json | 板级相关 |
| ohos/third_party/MAVSDK/bundle.json | 在子系统中添加组件配置 |
| ohos/third_party/MAVSDK/BUILD.gn | 三方库模块化,将其加入组件中的 gn 文件 |
subsystem_config.json
首先在 ohos/build/subsystem 中添加 subsystem 节点。
"mavsdk": { "path": "third_party/MAVSDK", "name": "mavsdk"}
ohos-arm64.json 文件
在 ohos/productdefine/common/products/ohos-arm64.json 文件中添加板级相关的信息。
"mavsdk:MAVSDK":{}
如下图所示:
Bundle.json 文件
在 ohos/third 目录下添加 bundle.json 文件,以便系统可以添加名为 MAVSDK 的组件。
对于此文件要点如注释所见(编译时去除注释以保证配置文件整洁性)
{"name": "@ohos/MAVSDK","description": "","version": "","license": "","publishAs": "","segment": {"destPath": "third_party/MAVSDK"},"dirs": {},"scripts": {},"readmePath": {},"component": {"name": "MAVSDK","subsystem": "mavsdk","syscap": [],"features": [],"adapted_system_type": [],"rom": "","ram": "","deps": {"components": [ "jsoncpp","zlib"//此处添加了要用的三方库,后续的build.gn中还会有所体现。],"third_party": ["jsoncpp","zlib"]},"build": {"sub_component": [ "//third_party/mavsdk:MAVSDK","//third_party/mavsdk:mavsdk_test"],//此处添加了接下来要编译的组件,一个是代码主仓组件,一个是代码的测试文件组件"inner_kits": [],"test": ["//third_party/mavsdk:mavsdk_test"]}}}BUILD.gn 文件
在完成上述步骤后,下面需要在 ohos/third 目录添加 BUILD.gn,根据不同的系统生成静态或者动态库,注意点如下:
| 文件 | 作用 |
|---|---|
| build.make | 生成目标的源文件 |
| depend.make | 需要依赖的其他 C 源文件 |
| flags.make | cflags 相关的一些标志 |
| link.txt | 链接库相关信息 |
① 注意移植时的 cflags、cflags 应从原始的编译文件(例如 cmake 过程中 build 的生成文件:在 cmake 生成 makefile 的过程中分析 build.make、depend.make、flags.make、link.txt 等得出三方库对应的依赖关系)中获取相关的标志位
② 注意移植的源文件及头文件地址可以使用当前 build.gn 所在路径下相对位置,例如/src 与 build.gn 在同一路径下则路径可以直接应用 src/....
③ 注意 deps 若引用的是组件内的其他模块,例如其他 build.gn 文件中的组件或当前 build.gn 中位于此 deps 前的其他组件可以使用 ”:module 进行模块依赖,若是引用组件外的其他组件则需要使用 ”bundle
import("//build/ohos.gni")
import("//build/test.gni")config("mavsdk_cflag_config") {#编译时的标志位cflags = [ "-fexceptions","-Wextra","-Wshadow","-Wno-strict-aliasing","-Wformat=2","-Wextra","-Wno-unused-lambda-capture","-Wno-pragmas","-Wno-unknown-warning-option","-Wduplicated-cond","-Wnull-dereference","-Wduplicated-branches","-Wlogical-op", "-Wno-old-style-cast","-pthread",]cflags_cc = [ "-frtti" ] #fix:[OHOS ERROR] ../../prebuilts/clang/ohos/linux-x86_64/llvm/bin/../include/libcxx-ohos/include/c++/v1/memory:3566:16: error: use of dynamic_cast requires -frttildflags = [ "-fPIC","-g","-shared","-Wl","-soname" ]
}ohos_source_set("libmavsdk_source") {configs = [":mavsdk_cflag_config"]deps = [ "//third_party/curl:curl" ] #需要包含的源文件sources = ["src/mavsdk/core/call_every_handler.cpp" ,"src/mavsdk/core/connection.cpp" ,"src/mavsdk/core/connection_result.cpp" ,"src/mavsdk/core/curl_wrapper.cpp" ,"src/mavsdk/core/crc32.cpp" ,"src/mavsdk/core/system.cpp" ,"src/mavsdk/core/system_impl.cpp" ,"src/mavsdk/core/fs.cpp" ,"src/mavsdk/core/mavsdk.cpp" ,"src/mavsdk/core/mavsdk_impl.cpp" ,"src/mavsdk/core/http_loader.cpp" ,"src/mavsdk/core/mavlink_channels.cpp" ,"src/mavsdk/core/mavlink_command_receiver.cpp" ,"src/mavsdk/core/mavlink_command_sender.cpp" ,"src/mavsdk/core/mavlink_ftp.cpp" ,"src/mavsdk/core/mavlink_mission_transfer.cpp" ,"src/mavsdk/core/mavlink_parameters.cpp" ,"src/mavsdk/core/mavlink_receiver.cpp" ,"src/mavsdk/core/mavlink_request_message_handler.cpp" ,"src/mavsdk/core/mavlink_statustext_handler.cpp" ,"src/mavsdk/core/mavlink_message_handler.cpp" ,"src/mavsdk/core/ping.cpp" ,"src/mavsdk/core/plugin_impl_base.cpp" ,"src/mavsdk/core/serial_connection.cpp" ,"src/mavsdk/core/tcp_connection.cpp" ,"src/mavsdk/core/timeout_handler.cpp" ,"src/mavsdk/core/udp_connection.cpp" ,"src/mavsdk/core/log.cpp" ,"src/mavsdk/core/cli_arg.cpp" ,"src/mavsdk/core/geometry.cpp" ,"src/mavsdk/core/request_message.cpp" ,"src/mavsdk/core/mavsdk_time.cpp" ,"src/mavsdk/core/timesync.cpp" ,"src/mavsdk/plugins/action/action.cpp" ,"src/mavsdk/plugins/action/action_impl.cpp" ,"src/mavsdk/plugins/action_server/action_server.cpp" ,"src/mavsdk/plugins/action_server/action_server_impl.cpp" ,"src/mavsdk/plugins/calibration/calibration.cpp" ,"src/mavsdk/plugins/calibration/calibration_impl.cpp" ,"src/mavsdk/plugins/calibration/calibration_statustext_parser.cpp" ,"src/mavsdk/plugins/camera/camera.cpp" ,"src/mavsdk/plugins/camera/camera_impl.cpp" ,"src/mavsdk/plugins/camera/camera_definition.cpp" ,"src/mavsdk/plugins/camera/camera_definition_files/generated/camera_definition_files.cpp" ,"src/mavsdk/plugins/component_information/component_information.cpp" ,"src/mavsdk/plugins/component_information/component_information_impl.cpp" ,"src/mavsdk/plugins/component_information_server/component_information_server.cpp" ,"src/mavsdk/plugins/component_information_server/component_information_server_impl.cpp" ,"src/mavsdk/plugins/failure/failure.cpp" ,"src/mavsdk/plugins/failure/failure_impl.cpp" ,"src/mavsdk/plugins/follow_me/follow_me.cpp" ,"src/mavsdk/plugins/follow_me/follow_me_impl.cpp" ,"src/mavsdk/plugins/ftp/ftp.cpp" ,"src/mavsdk/plugins/ftp/ftp_impl.cpp" ,"src/mavsdk/plugins/geofence/geofence.cpp" ,"src/mavsdk/plugins/geofence/geofence_impl.cpp" ,"src/mavsdk/plugins/gimbal/gimbal.cpp" ,"src/mavsdk/plugins/gimbal/gimbal_impl.cpp" ,"src/mavsdk/plugins/gimbal/gimbal_protocol_v1.cpp" ,"src/mavsdk/plugins/gimbal/gimbal_protocol_v2.cpp" ,"src/mavsdk/plugins/info/info.cpp" ,"src/mavsdk/plugins/info/info_impl.cpp" ,"src/mavsdk/plugins/log_files/log_files.cpp" ,"src/mavsdk/plugins/log_files/log_files_impl.cpp" ,"src/mavsdk/plugins/manual_control/manual_control.cpp" ,"src/mavsdk/plugins/manual_control/manual_control_impl.cpp" ,"src/mavsdk/plugins/mavlink_passthrough/mavlink_passthrough.cpp" ,"src/mavsdk/plugins/mavlink_passthrough/mavlink_passthrough_impl.cpp" ,"src/mavsdk/plugins/mission/mission.cpp" ,"src/mavsdk/plugins/mission/mission_impl.cpp" ,"src/mavsdk/plugins/mission_raw/mission_raw.cpp" ,"src/mavsdk/plugins/mission_raw/mission_raw_impl.cpp" ,"src/mavsdk/plugins/mission_raw/mission_import.cpp" ,"src/mavsdk/plugins/mission_raw_server/mission_raw_server.cpp" ,"src/mavsdk/plugins/mission_raw_server/mission_raw_server_impl.cpp" ,"src/mavsdk/plugins/mocap/mocap.cpp" ,"src/mavsdk/plugins/mocap/mocap_impl.cpp" ,"src/mavsdk/plugins/offboard/offboard.cpp" ,"src/mavsdk/plugins/offboard/offboard_impl.cpp" ,"src/mavsdk/plugins/param/param.cpp" ,"src/mavsdk/plugins/param/param_impl.cpp" ,"src/mavsdk/plugins/param_server/param_server.cpp" ,"src/mavsdk/plugins/param_server/param_server_impl.cpp" ,"src/mavsdk/plugins/server_utility/server_utility.cpp" ,"src/mavsdk/plugins/server_utility/server_utility_impl.cpp" ,"src/mavsdk/plugins/shell/shell.cpp" ,"src/mavsdk/plugins/shell/shell_impl.cpp" ,"src/mavsdk/plugins/telemetry/telemetry.cpp" ,"src/mavsdk/plugins/telemetry/telemetry_impl.cpp" ,"src/mavsdk/plugins/telemetry/math_conversions.cpp" ,"src/mavsdk/plugins/telemetry_server/telemetry_server.cpp" ,"src/mavsdk/plugins/telemetry_server/telemetry_server_impl.cpp" ,"src/mavsdk/plugins/tracking_server/tracking_server.cpp" ,"src/mavsdk/plugins/tracking_server/tracking_server_impl.cpp" ,"src/mavsdk/plugins/transponder/transponder.cpp" ,"src/mavsdk/plugins/transponder/transponder_impl.cpp" ,"src/mavsdk/plugins/rtk/rtk.cpp" ,"src/mavsdk/plugins/rtk/rtk_impl.cpp" ,"src/mavsdk/plugins/tune/tune.cpp" ,"src/mavsdk/plugins/tune/tune_impl.cpp"]#需要包含的头文件include_dirs = ["src/mavsdk/core","src/mavsdk/core/include/mavsdk","src/mavsdk/plugins/action/include","src/mavsdk/plugins/action_server/include","src/mavsdk/plugins/calibration/include","src/mavsdk/plugins/camera/include","src/mavsdk/plugins/camera/camera_definition_files/generated","src/mavsdk/plugins/component_information/include","src/mavsdk/plugins/component_information_server/include","src/mavsdk/plugins/failure/include","src/mavsdk/plugins/follow_me/include","src/mavsdk/plugins/ftp/include","src/mavsdk/plugins/geofence/include","src/mavsdk/plugins/gimbal/include","src/mavsdk/plugins/info/include","src/mavsdk/plugins/log_files/include","src/mavsdk/plugins/manual_control/include","src/mavsdk/plugins/mavlink_passthrough/include","src/mavsdk/plugins/mission/include","src/mavsdk/plugins/mission_raw/include","src/mavsdk/plugins/mission_raw_server/include","src/mavsdk/plugins/mocap/include","src/mavsdk/plugins/offboard/include","src/mavsdk/plugins/param/include","src/mavsdk/plugins/param_server/include","src/mavsdk/plugins/rtk/include","src/mavsdk/plugins/server_utility/include","src/mavsdk/plugins/shell/include","src/mavsdk/plugins/telemetry/include","src/mavsdk/plugins/telemetry_server/include","src/mavsdk/plugins/tracking_server/include","src/mavsdk/plugins/transponder/include","src/mavsdk/plugins/tune/include","src/mavsdk/plugins/action","src/mavsdk/plugins/action_server","src/mavsdk/plugins/calibration","src/mavsdk/plugins/camera","src/mavsdk/plugins/component_information","src/mavsdk/plugins/component_information_server","src/mavsdk/plugins/failure","src/mavsdk/plugins/follow_me","src/mavsdk/plugins/ftp","src/mavsdk/plugins/geofence","src/mavsdk/plugins/gimbal","src/mavsdk/plugins/info","src/mavsdk/plugins/log_files","src/mavsdk/plugins/manual_control","src/mavsdk/plugins/mavlink_passthrough","src/mavsdk/plugins/mission","src/mavsdk/plugins/mission_raw","src/mavsdk/plugins/mission_raw_server","src/mavsdk/plugins/mocap","src/mavsdk/plugins/offboard","src/mavsdk/plugins/param","src/mavsdk/plugins/param_server","src/mavsdk/plugins/rtk","src/mavsdk/plugins/server_utility","src/mavsdk/plugins/shell","src/mavsdk/plugins/telemetry","src/mavsdk/plugins/telemetry_server","src/mavsdk/plugins/tracking_server","src/mavsdk/plugins/transponder","src/mavsdk/plugins/tune","src/third_party/mavlink","src/third_party/mavlink/mavlink/src/mavlink/include/mavlink/v2.0","src/third_party/mavlink/mavlink/src/mavlink/include/mavlink/v2.0/common","//third_party/jsoncpp/include","//third_party/curl/include","//third_party/tinyxml2","//third_party/zlib",]
}ohos_shared_library("MAVSDK") {deps = [ ":libmavsdk_source","//third_party/curl:curl_shared","//third_party/openssl:libssl_shared","//third_party/openssl:libcrypto_shared","//third_party/jsoncpp:jsoncpp","//third_party/tinyxml2:tinyxml2"] #依赖的三方库part_name = "MAVSDK"subsystem_name = "mavsdk"output_name = "libmavsdk"}ohos_executable("takeoff_and_land") {use_exceptions = trueoutput_name = "takeoff_and_land" # 可选,模块输出名include_dirs = ["src/third_party/mavlink/mavlink/src/mavlink/include","src/mavsdk/core/include/mavsdk","src/mavsdk/plugins/action/include","src/mavsdk/plugins/telemetry/include"]sources = ["examples/takeoff_and_land/takeoff_and_land.cpp","examples/takeoff_and_land/autopilot_interface.cpp",]deps = ["//third_party/MAVSDK:MAVSDK"]part_name = "MAVSDK"subsystem_name = "MAVSDK"}
#演示编译部分
ohos_executable("offboard") { use_exceptions = trueoutput_name = "offboard" # 可选,模块输出名include_dirs = ["src/third_party/mavlink/mavlink/src/mavlink/include","src/mavsdk/core/include/mavsdk","src/mavsdk/plugins/offboard/include","src/mavsdk/plugins/action/include","src/mavsdk/plugins/telemetry/include"]sources = ["examples/offboard/offboard.cpp",]deps= ["//third_party/MAVSDK:MAVSDK"]part_name = "MAVSDK"subsystem_name = "MAVSDK"}#编译测试文件
ohos_unittest("mavsdk_test") {module_out_path = "MAVSDK/mavsdk_test" testonly = trueuse_exceptions = trueinclude_dirs = [ "src/mavsdk/core/include/mavsdk","src/mavsdk/plugins/action/include","src/mavsdk/plugins/action_server/include","src/mavsdk/plugins/calibration/include","src/mavsdk/plugins/camera/include","src/mavsdk/plugins/camera/camera_definition_files/generated","src/mavsdk/plugins/component_information/include","src/mavsdk/plugins/component_information_server/include","src/mavsdk/plugins/failure/include","src/mavsdk/plugins/follow_me/include","src/mavsdk/plugins/ftp/include","src/mavsdk/plugins/geofence/include","src/mavsdk/plugins/gimbal/include","src/mavsdk/plugins/info/include","src/mavsdk/plugins/log_files/include","src/mavsdk/plugins/manual_control/include","src/mavsdk/plugins/mavlink_passthrough/include","src/mavsdk/plugins/mission/include","src/mavsdk/plugins/mission_raw/include","src/mavsdk/plugins/mission_raw_server/include","src/mavsdk/plugins/mocap/include","src/mavsdk/plugins/offboard/include","src/mavsdk/plugins/param/include","src/mavsdk/plugins/param_server/include","src/mavsdk/plugins/rtk/include","src/mavsdk/plugins/server_utility/include","src/mavsdk/plugins/shell/include","src/mavsdk/plugins/telemetry/include","src/mavsdk/plugins/telemetry_server/include","src/mavsdk/plugins/tracking_server/include","src/mavsdk/plugins/transponder/include","src/mavsdk/plugins/tune/include","src/mavsdk/core","src/mavsdk/plugins/action","src/mavsdk/plugins/action_server","src/mavsdk/plugins/calibration","src/mavsdk/plugins/camera","src/mavsdk/plugins/component_information","src/mavsdk/plugins/component_information_server","src/mavsdk/plugins/failure","src/mavsdk/plugins/follow_me","src/mavsdk/plugins/ftp","src/mavsdk/plugins/geofence","src/mavsdk/plugins/gimbal","src/mavsdk/plugins/info","src/mavsdk/plugins/log_files","src/mavsdk/plugins/manual_control","src/mavsdk/plugins/mavlink_passthrough","src/mavsdk/plugins/mission","src/mavsdk/plugins/mission_raw","src/mavsdk/plugins/mission_raw_server","src/mavsdk/plugins/mocap","src/mavsdk/plugins/offboard","src/mavsdk/plugins/param","src/mavsdk/plugins/param_server","src/mavsdk/plugins/rtk","src/mavsdk/plugins/server_utility","src/mavsdk/plugins/shell","src/mavsdk/plugins/telemetry","src/mavsdk/plugins/telemetry_server","src/mavsdk/plugins/tracking_server","src/mavsdk/plugins/transponder","src/mavsdk/plugins/tune","src/third_party/mavlink","src/third_party/curl/curl/src/curl/include","src/third_party/install/include","src/third_party/mavlink/mavlink/src/mavlink/include/mavlink/v2.0","src/third_party/mavlink/mavlink/src/mavlink/include/mavlink/v2.0/common",]sources = ["src/mavsdk/core/mavsdk_time_test.cpp" ,"src/mavsdk/core/mavsdk_math_test.cpp" ,"src/mavsdk/core/mavlink_channels_test.cpp" ,"src/mavsdk/core/unittests_main.cpp" ,"src/mavsdk/core/timeout_handler_test.cpp" ,"src/mavsdk/core/call_every_handler_test.cpp" ,"src/mavsdk/core/curl_test.cpp" ,"src/mavsdk/core/cli_arg_test.cpp" ,"src/mavsdk/core/locked_queue_test.cpp" ,"src/mavsdk/core/safe_queue_test.cpp" ,"src/mavsdk/core/mavsdk_test.cpp" ,"src/mavsdk/core/mavlink_mission_transfer_test.cpp" ,"src/mavsdk/core/mavlink_statustext_handler_test.cpp" ,"src/mavsdk/core/geometry_test.cpp" ,"src/mavsdk/core/ringbuffer_test.cpp" ,"src/mavsdk/plugins/calibration/calibration_statustext_parser_test.cpp" ,"src/mavsdk/plugins/camera/camera_definition_test.cpp" ,"src/mavsdk/plugins/mission_raw/mission_import_test.cpp" ,"src/mavsdk/plugins/telemetry/math_conversions_test.cpp"]deps = ["//third_party/MAVSDK:MAVSDK","//third_party/googletest:gmock_main","//third_party/googletest:gtest_main"]part_name = "MAVSDK"
}通过以上操作以后,就可以在 OpenHarmony 编译源码了:
./build.sh --product-name rpi4 --build-target=MAVSDK --ccache
编译完成以后可以在 out/rpi4/mavsdk/MAVSDK 目录下看到编译生成的 libmavsdk.z.so 文件。
同时,还可以在 ohos/out/rpi4/tests/unittest/MAVSDK/mavsdk_test/mavsdk_test 目录下看到我们编译的测试文件,如下所示:

接下来把编译完成的 so 及测试文件到 RPI4 开发板中,运行测试文件验证整个库的移植情况。
最后
有很多小伙伴不知道学习哪些鸿蒙开发技术?不知道需要重点掌握哪些鸿蒙应用开发知识点?而且学习时频繁踩坑,最终浪费大量时间。所以有一份实用的鸿蒙(HarmonyOS NEXT)资料用来跟着学习是非常有必要的。
这份鸿蒙(HarmonyOS NEXT)资料包含了鸿蒙开发必掌握的核心知识要点,内容包含了(ArkTS、ArkUI开发组件、Stage模型、多端部署、分布式应用开发、音频、视频、WebGL、OpenHarmony多媒体技术、Napi组件、OpenHarmony内核、Harmony南向开发、鸿蒙项目实战等等)鸿蒙(HarmonyOS NEXT)技术知识点。
希望这一份鸿蒙学习资料能够给大家带来帮助,有需要的小伙伴自行领取,限时开源,先到先得~无套路领取!!
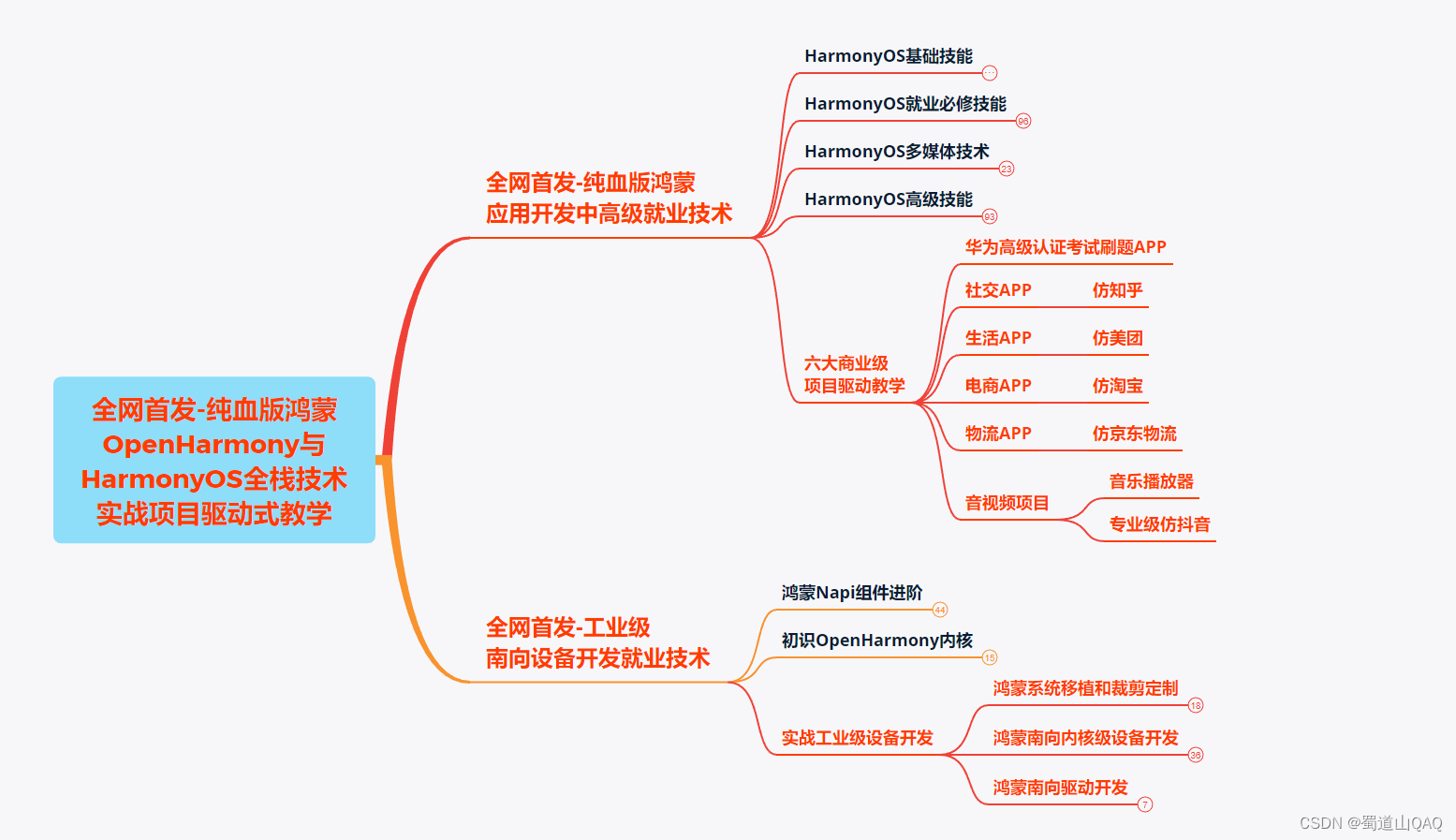
获取这份完整版高清学习路线,请点击→纯血版全套鸿蒙HarmonyOS学习资料
鸿蒙(HarmonyOS NEXT)最新学习路线
-
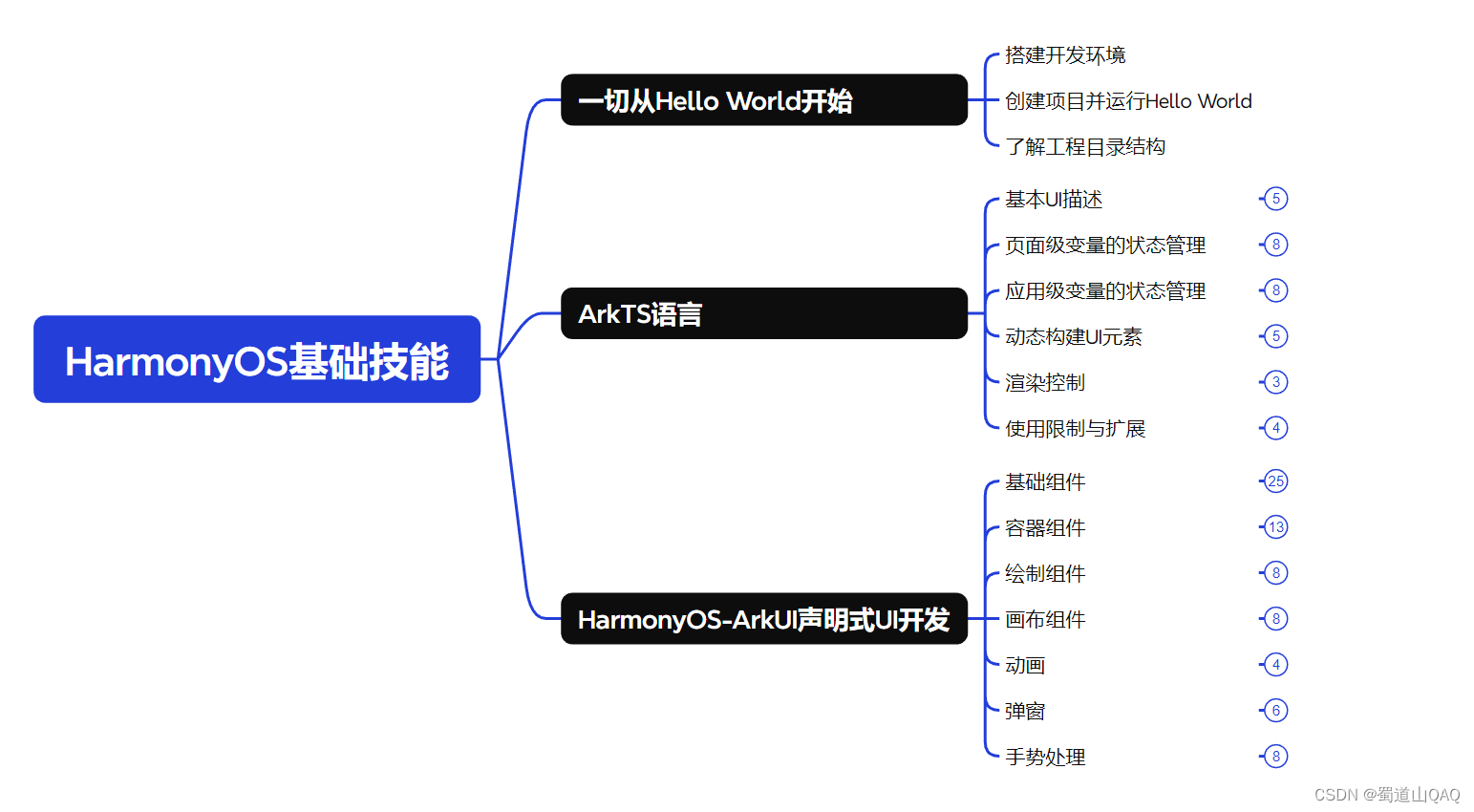
HarmonOS基础技能
- HarmonOS就业必备技能
- HarmonOS多媒体技术
- 鸿蒙NaPi组件进阶
- HarmonOS高级技能

- 初识HarmonOS内核
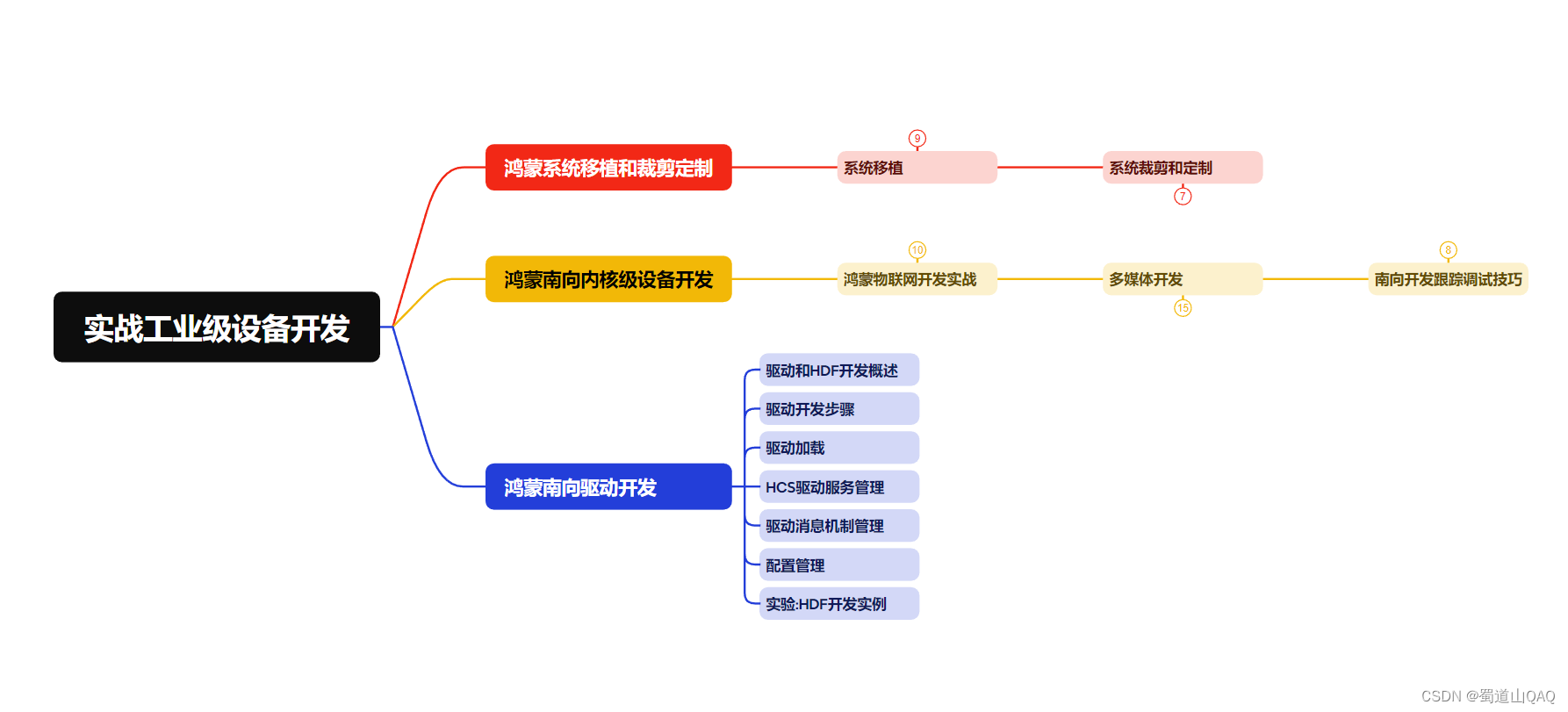
- 实战就业级设备开发
有了路线图,怎么能没有学习资料呢,小编也准备了一份联合鸿蒙官方发布笔记整理收纳的一套系统性的鸿蒙(OpenHarmony )学习手册(共计1236页)与鸿蒙(OpenHarmony )开发入门教学视频,内容包含:ArkTS、ArkUI、Web开发、应用模型、资源分类…等知识点。
获取以上完整版高清学习路线,请点击→纯血版全套鸿蒙HarmonyOS学习资料
《鸿蒙 (OpenHarmony)开发入门教学视频》
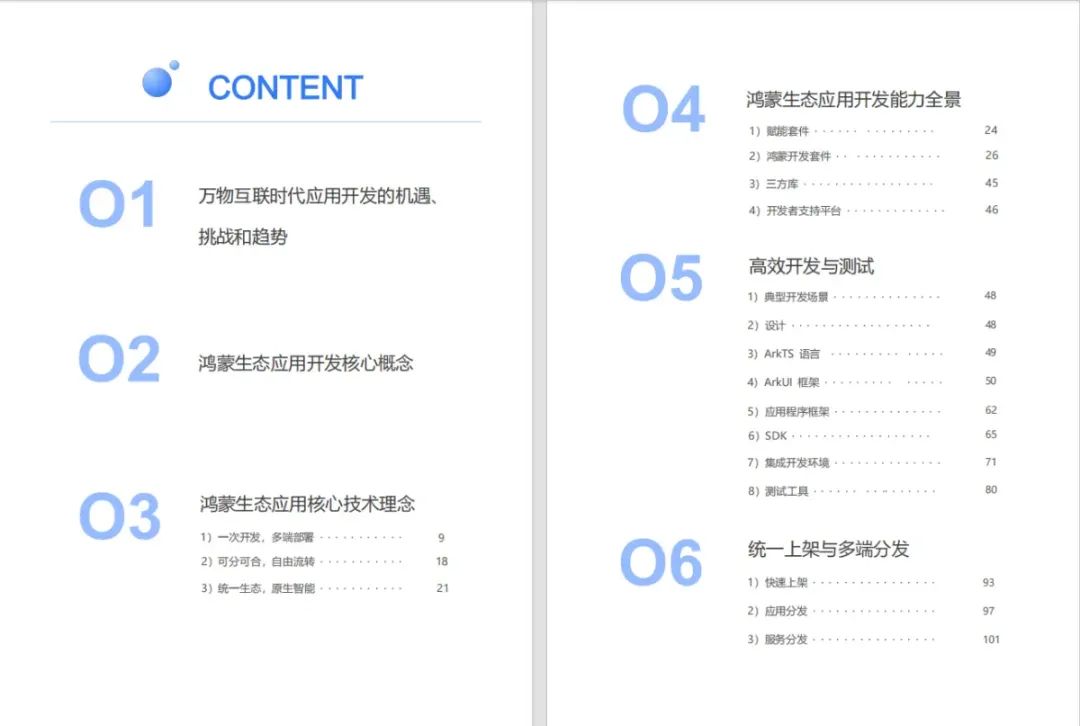
《鸿蒙生态应用开发V2.0白皮书》
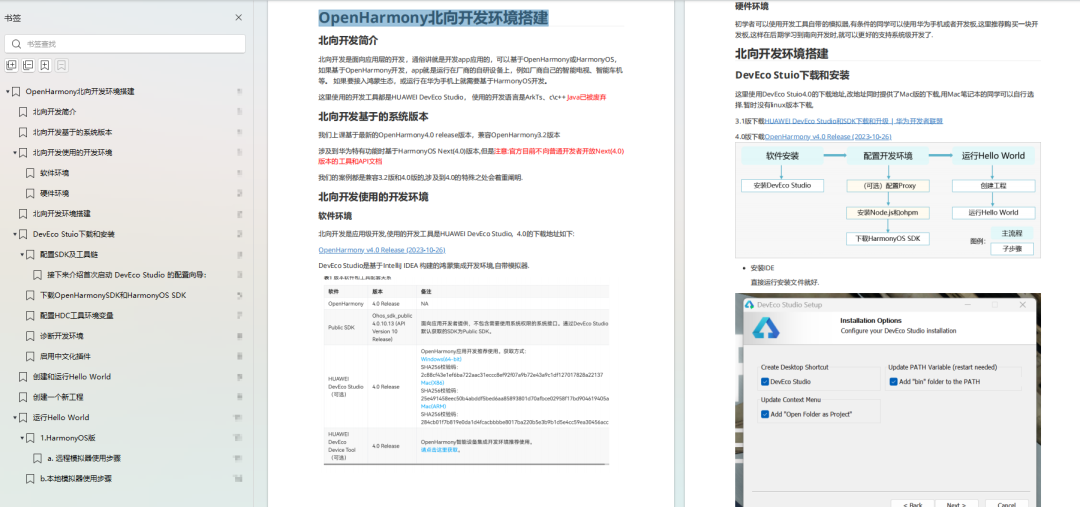
《鸿蒙 (OpenHarmony)开发基础到实战手册》
OpenHarmony北向、南向开发环境搭建
《鸿蒙开发基础》
- ArkTS语言
- 安装DevEco Studio
- 运用你的第一个ArkTS应用
- ArkUI声明式UI开发
- .……
《鸿蒙开发进阶》
- Stage模型入门
- 网络管理
- 数据管理
- 电话服务
- 分布式应用开发
- 通知与窗口管理
- 多媒体技术
- 安全技能
- 任务管理
- WebGL
- 国际化开发
- 应用测试
- DFX面向未来设计
- 鸿蒙系统移植和裁剪定制
- ……
《鸿蒙进阶实战》
- ArkTS实践
- UIAbility应用
- 网络案例
- ……
获取以上完整鸿蒙HarmonyOS学习资料,请点击→纯血版全套鸿蒙HarmonyOS学习资料
总结
总的来说,华为鸿蒙不再兼容安卓,对中年程序员来说是一个挑战,也是一个机会。只有积极应对变化,不断学习和提升自己,他们才能在这个变革的时代中立于不败之地。

相关文章:
OpenHarmony无人机MAVSDK开源库适配方案分享
MAVSDK 是 PX4 开源团队贡献的基于 MavLink 通信协议的用于无人机应用开发的 SDK,支持多种语言如 C/C、python、Java 等。通常用于无人机间、地面站与通信设备的消息传输。 MAVLink 是一种非常轻量级的消息传递协议,用于与无人机(以及机载无…...
模型训练----parser.add_argument添加配置参数
现在需要配置参数来达到修改训练的方式,我现在需要新建一个参数来开关wandb的使用。 首先就是在def parse_option():函数里添加上你要使用的变量名 parser.add_argument("--open_wandb",type bool,defaultFalse,helpopen wandb) 到config文件里增加你的…...
数字未来:探索 Web3 的革命性潜力
在当今数字化的时代,Web3作为互联网的新兴范式正逐渐崭露头角,引发了广泛的关注和探讨。本文将深入探索数字未来中Web3所蕴含的革命性潜力,探讨其对社会、经济和技术的深远影响。 1. Web3:数字世界的下一个阶段 Web3是一个正在崛…...
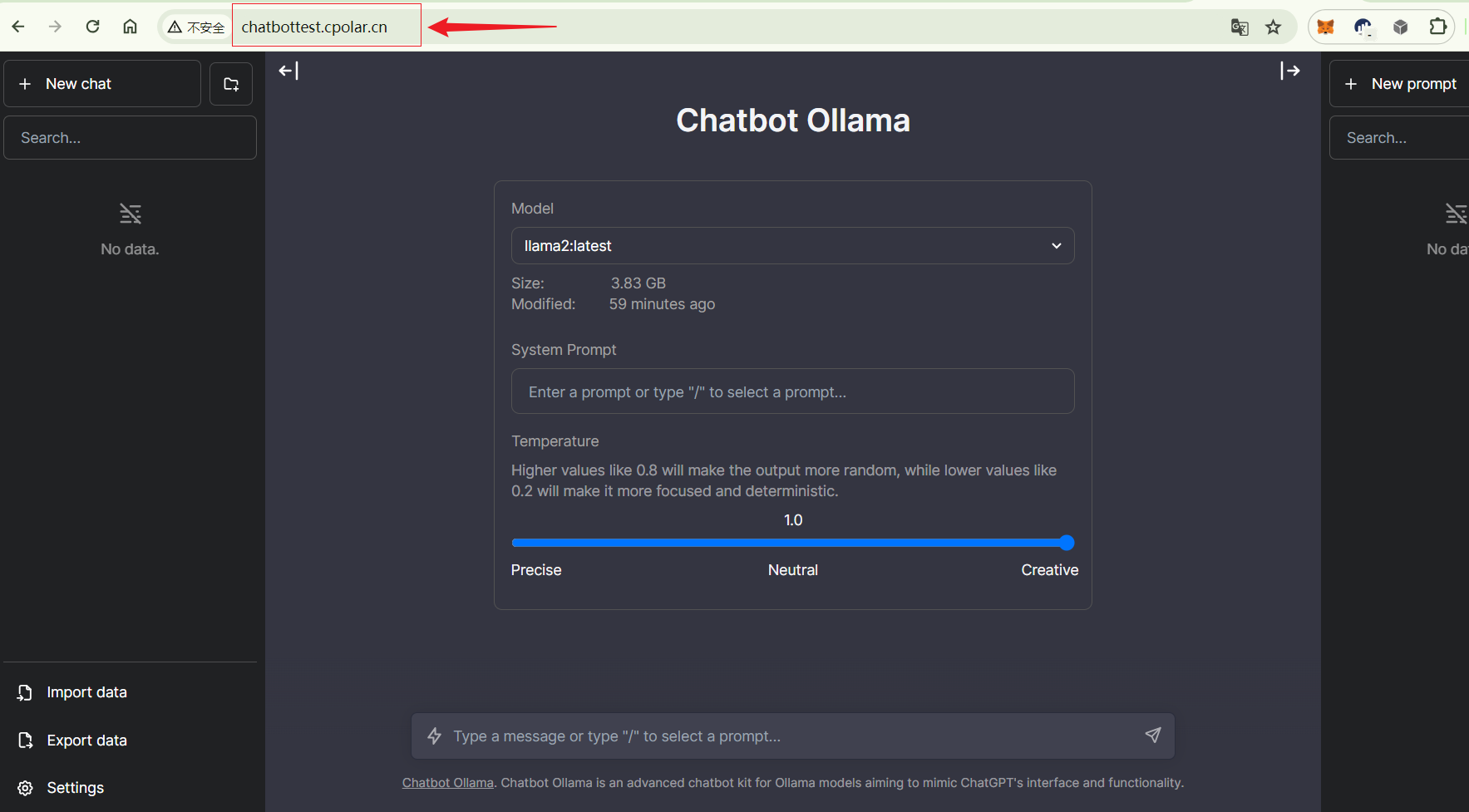
群晖NAS使用Docker部署大语言模型Llama 2结合内网穿透实现公网访问本地GPT聊天服务
文章目录 1. 拉取相关的Docker镜像2. 运行Ollama 镜像3. 运行Chatbot Ollama镜像4. 本地访问5. 群晖安装Cpolar6. 配置公网地址7. 公网访问8. 固定公网地址 随着ChatGPT 和open Sora 的热度剧增,大语言模型时代,开启了AI新篇章,大语言模型的应用非常广泛,包括聊天机…...

[选型必备基础信息] 存储器
存储芯片根据断电后是否保留存储的信息可分为易失性存储芯片(RAM)和非易失性存储芯片(ROM)。 简单说,存储类IC分为 ROM和RAM ROM:EEPROM / Flash / eMMC RAM:SRAM/SDRAM/DDR2/DDR3/DDR4/DDR5…...
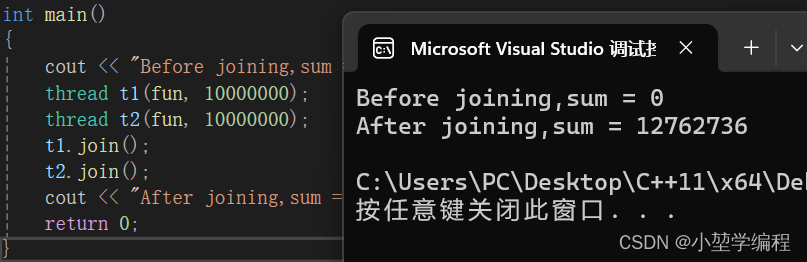
C++——C++11线程库
目录 一,线程库简介 二,线程库简单使用 2.1 传函数指针 编辑 2.2 传lamdba表达式 2.3 简单综合运用 2.4 线程函数参数 三,线程安全问题 3.1 为什么会有这个问题? 3.2 锁 3.2.1 互斥锁 3.2.2 递归锁 3.3 原子操作 3…...
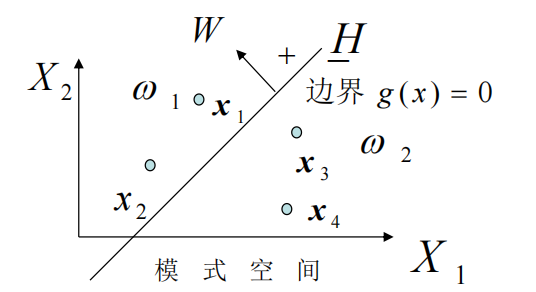
机器学习 | 线性判别分析(Linear Discriminant Analysis)
1 机器学习中的建模 1.1 描述性建模 以方便的形式给出数据的主要特征,实质上是对数据的概括,以便在大量的或有噪声的数据中仍能观察到重要特征。重在认识数据的主要概貌,理解数据的重要特征。 Task:聚类分析,数据降…...

TypeScript-数组、函数类型
1.数组类型 1.1类型 方括号 let arry:number[][5,2,0,1,3,1,4] 1.2 数组泛型 let arry2:Array<number>[5,2,0,1,3,1,4] 1.3接口类型 interface makeArryRule{[index:number]:number }let arry3:makeArryRule[5,2,0,1,3,1,4] 1.4伪数组 说明: argument…...
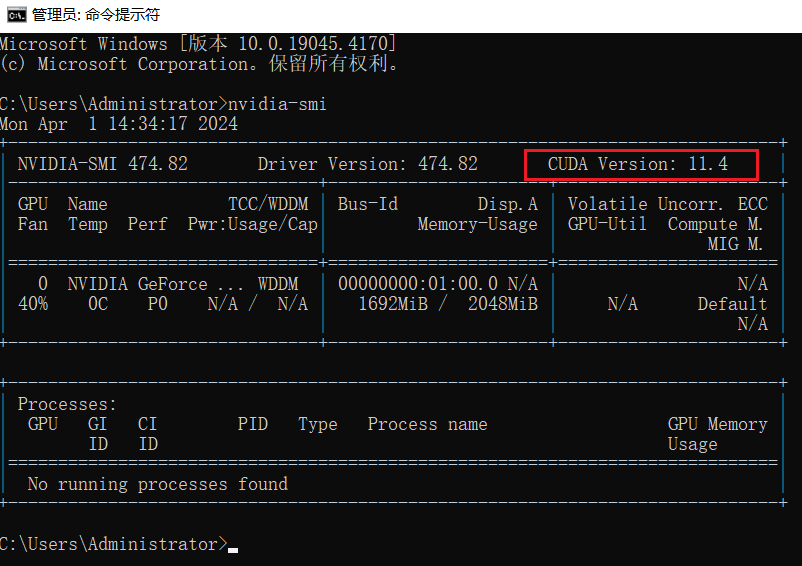
Python深度学习034:cuda的环境如何配置
文章目录 1.安装nvidia cuda驱动CMD中看一下cuda版本:下载并安装cuda驱动2.创建虚拟环境并安装pytorch的torch_cuda3.测试附录1.安装nvidia cuda驱动 CMD中看一下cuda版本: 注意: 红框的cuda版本,是你的显卡能装的最高的cuda版本,所以可以选择低于它的版本。比如我的是11…...
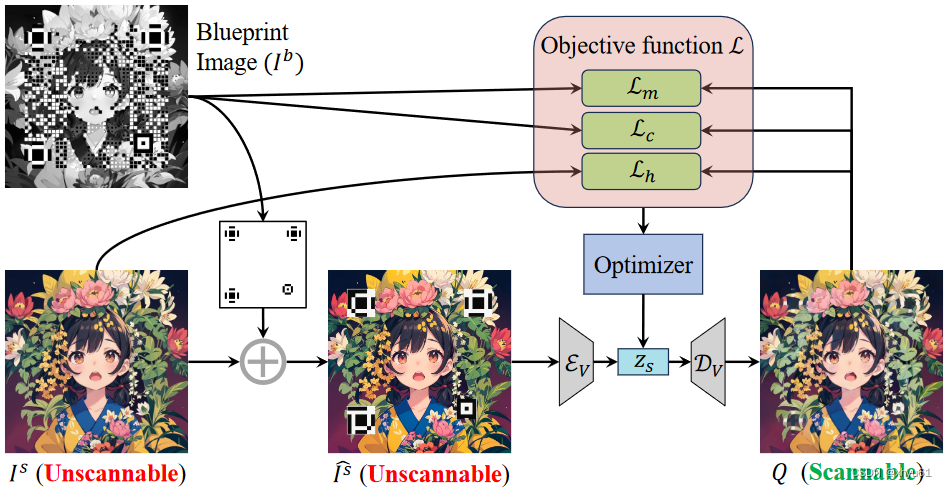
【论文笔记】Text2QR
论文:Text2QR: Harmonizing Aesthetic Customization and Scanning Robustness for Text-Guided QR Code Generation Abstract 二维码通常包含很多信息但看起来并不美观。stable diffusion的出现让平衡扫描鲁棒性和美观变为可能。 为了保证美观二维码的稳定生成&a…...
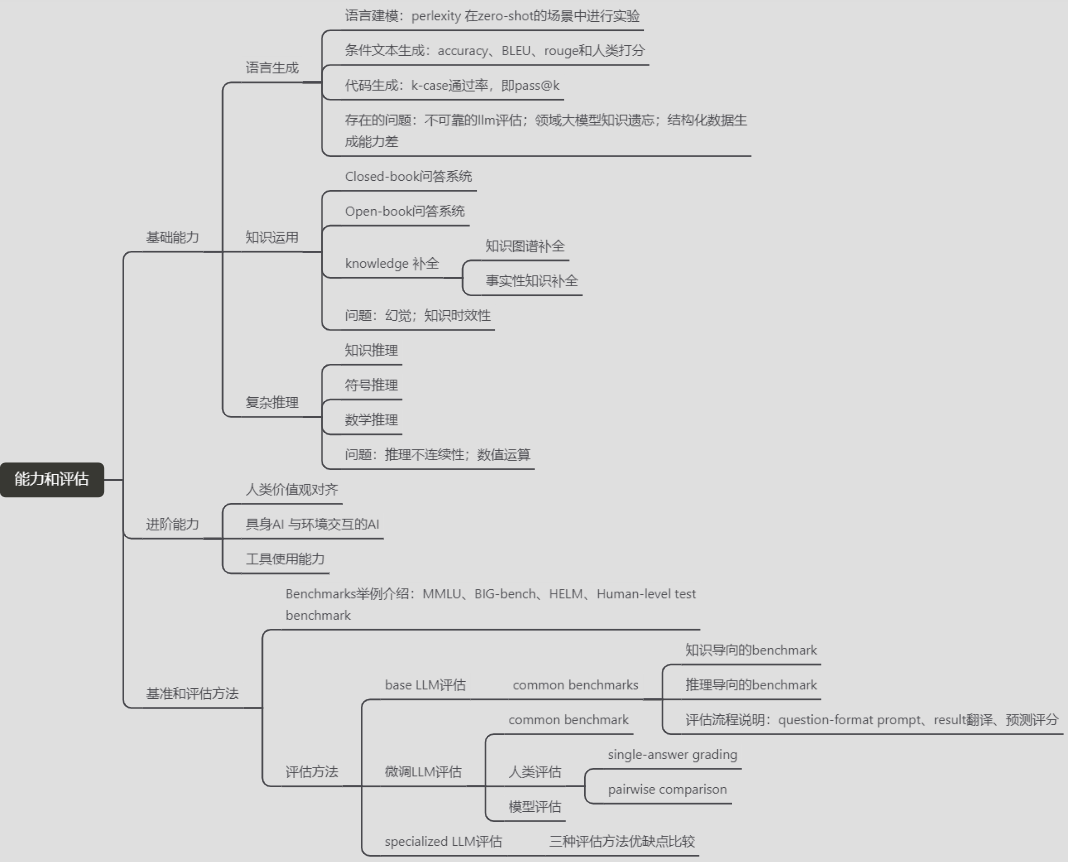
【ReadPapers】A Survey of Large Language Models
LLM-Survey的llm能力和评估部分内容学习笔记——思维导图 思维导图 参考资料 A Survey of Large Language Models论文的github仓库...

站群CMS系统
站群CMS系统是一种用于批量建立和管理网站的内容管理系统,它能够帮助用户快速创建大量的网站,并实现对这些网站的集中管理。以下是三个在使用广泛的站群CMS系统,它们各具特色,可以满足不同用户的需求。 1. Z-BlogPHP Z-BlogPHP是…...
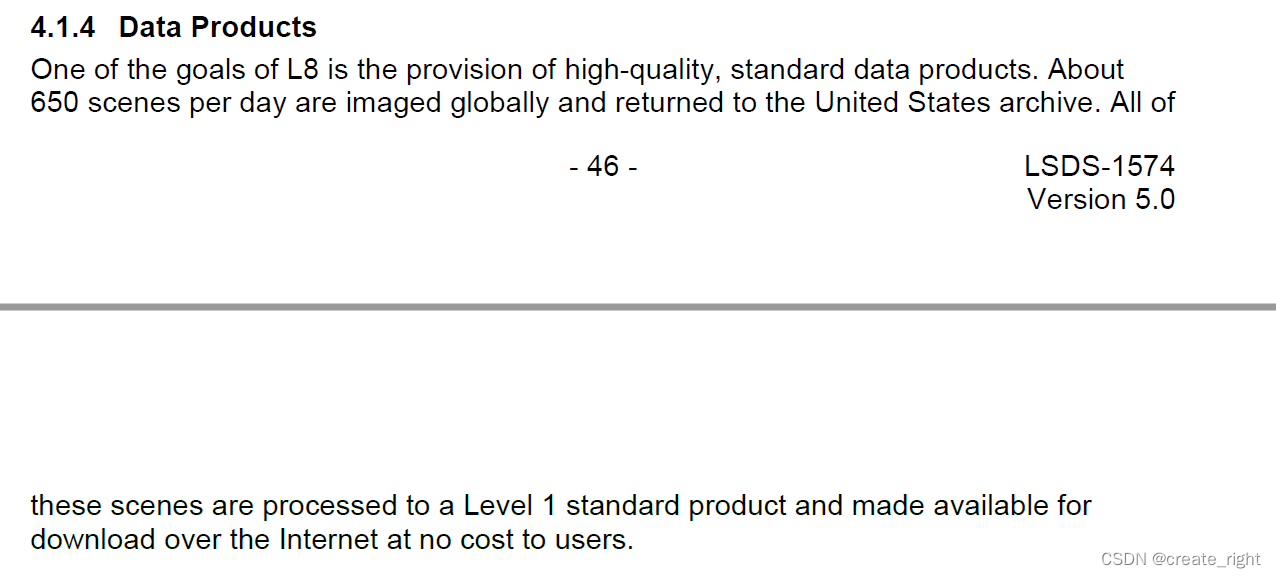
landsat8数据产品说明
1、下载数据用户手册 手册下载网址,搜索landsat science关键词,并点击到官网下载。 2、用户手册目录 3、landsat8数据产品说明 具体说明在手册的第四章,4.1.4数据产品章节,具体描述如下: 英文意思: L8 的…...
Golang 内存管理和垃圾回收底层原理(二)
一、这篇文章我们来聊聊Golang内存管理和垃圾回收,主要注重基本底层原理讲解,进一步实战待后续文章 垃圾回收,无论是Java 还是 Golang,基本的逻辑都是基于 标记-清理 的, 标记是指标记可能需要回收的对象,…...
OpenHarmony:全流程讲解如何编写ADC平台驱动以及应用程序
ADC(Analog to Digital Converter),即模拟-数字转换器,可将模拟信号转换成对应的数字信号,便于存储与计算等操作。除电源线和地线之外,ADC只需要1根线与被测量的设备进行连接。 一、案例简介 该程序是基于…...

计算机学生求职简历的一些想法
面试真的是一件非常难的事情,因为在短短的半小时到一个小时,来判断一个同学行不行,其实是很不全面的。作为一个求职的同学应该怎么办呢?求职的同学可以提前做一些准备,其中比较重要的要数简历的编写。 简历的作用 简…...

网工内推 | 售前专场,需熟悉云计算技术,上市公司,提成高
01 神州数码 招聘岗位:售前工程师 职责描述: 1.负责所在区域华为IT产品线(服务器、存储、云、虚拟化)的售前技术支持工作,包括客户交流、方案编写、配置报价、投标支持、测试等; 2.与厂商相关人员建立和保…...
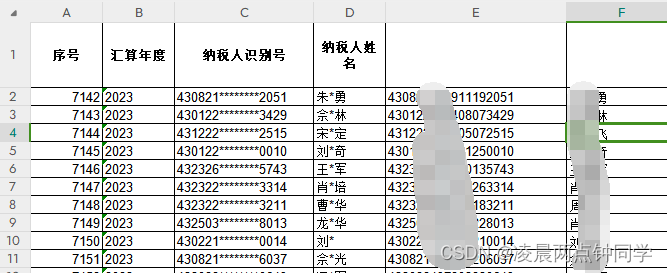
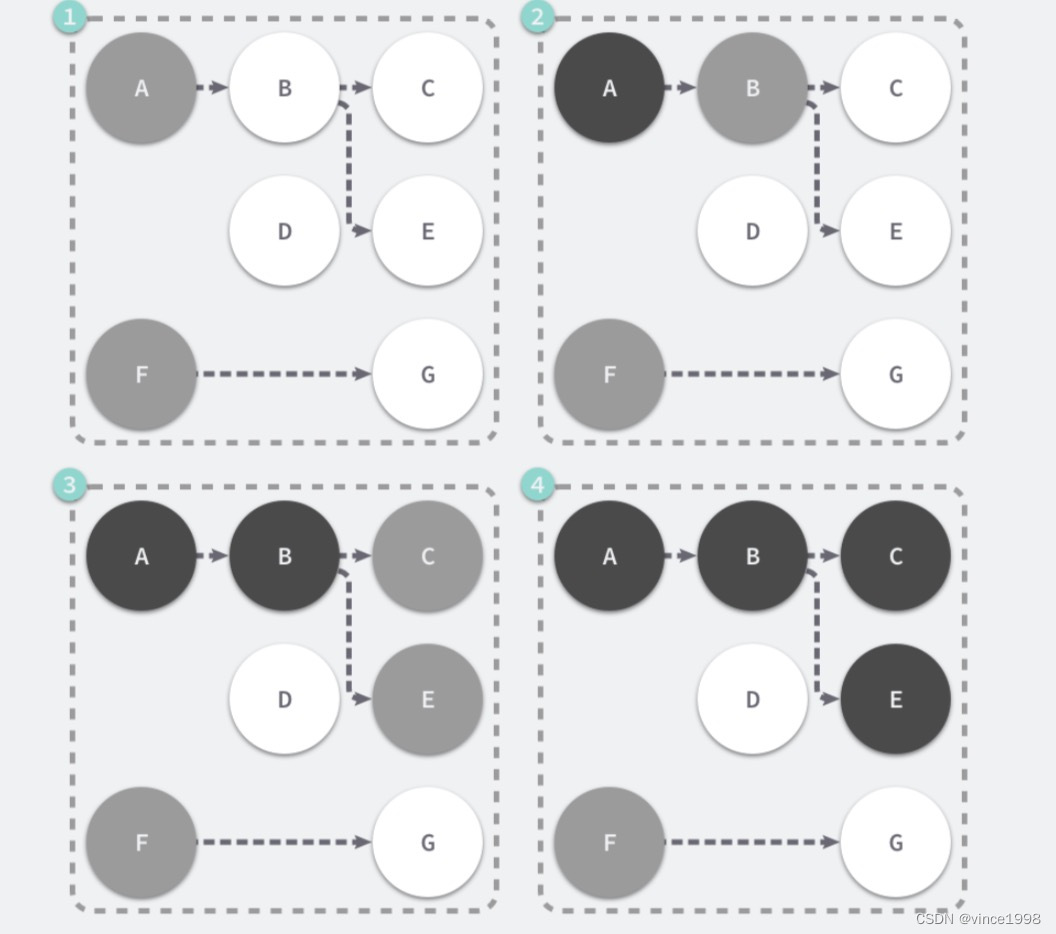
excel匹配替换脱敏身份证等数据
假如excel sheet1中有脱敏的身份证号码和姓名,如: sheet2中有未脱敏的数据数据 做法如下: 1、在sheet2的C列用公式 LEFT(A2,6)&REPT("*",8)&RIGHT(A2,4) 做出脱敏数据,用来与sheet1的脱敏数据匹配 2、在sheet…...
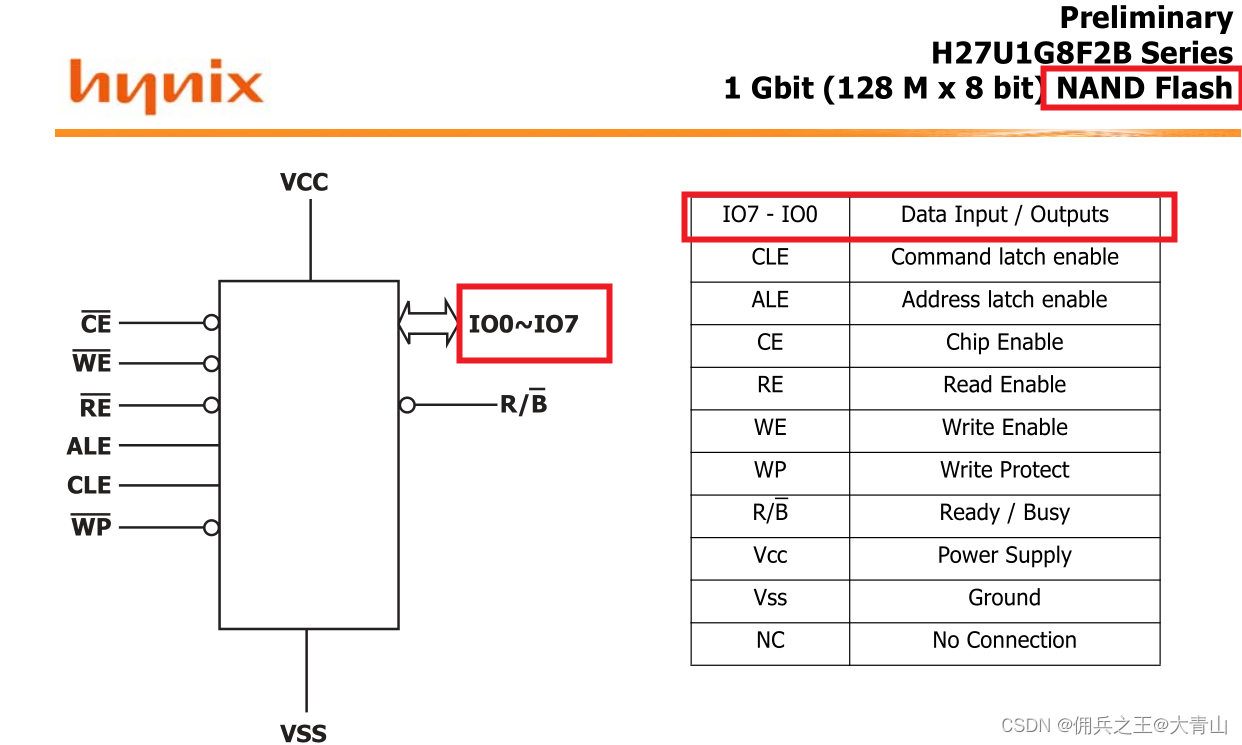
[技术笔记] Flash选型之基础知识芯片分类
1、按照接口分类 分为 Serial串口Flash 和 Parallel并口Flash; 市场大量使用Serial Flash;价格便宜;已满足系统对数据读写速度的要求; Serial Flash已经可以代表 NOR Flash; 小知识: 1)在…...

Jenkins常用插件安装及全局配置
Jenkins常用插件安装及全局配置 前言 Jenkins是一个流行的持续集成工具,通过安装适用的插件,可以扩展Jenkins的功能,并与其他工具和系统集成。本文将介绍一些常用的Jenkins插件以及安装和配置的步骤。通过安装和配置这些常用插件…...

构建企业级知识库语义搜索引擎:NLP-StructBERT与MySQL协同实战
构建企业级知识库语义搜索引擎:NLP-StructBERT与MySQL协同实战 你是不是也遇到过这样的烦恼?公司内部堆积如山的文档、报告、产品手册,当你想找一份关于“如何解决客户退款流程中的常见问题”的资料时,在搜索框里输入“退款 流程…...

别再纠结选哪种了!用MATLAB机器人工具箱,5分钟搞定六轴机械臂的避障路径规划
六轴机械臂避障路径规划的MATLAB实战指南:5分钟决策与实现 在工业自动化实验室里,一位工程师正盯着屏幕上机械臂的异常抖动皱眉——这已经是本周第三次因为路径规划不当导致产线停摆了。类似的情景每天都在全球无数实验室和工厂上演,而问题的…...
,GitNexus公共记忆系统从入门到精通,收藏这一篇就够了!)
代码知识图谱进阶实战(非常详细),GitNexus公共记忆系统从入门到精通,收藏这一篇就够了!
🦀在 GitHub 日榜登顶的 GitNexus,表面是一款代码智能引擎,本质上是用图结构沉淀知识、让协作永不失忆的基础设施。它不仅解决了“屎山代码看不懂”的问题,更给我们提供了一套构建可靠公共记忆系统的底层范式。 一、GitNexus 到底…...
)
FM17550读写器实战:从零开始玩转S50卡(附完整代码)
FM17550读写器实战:从零开始玩转S50卡(附完整代码) 第一次接触RFID技术时,我被那个"隔空取物"般的神奇体验震撼到了——不需要任何物理接触,卡片靠近读写器就能完成数据交换。作为物联网领域最基础的感知技术…...

AI辅助开发:构建智能客服评分标准的实战指南
在智能客服系统的运营中,客服质量评估是至关重要的一环。一个客观、高效的评分标准不仅能帮助管理者发现问题、优化服务流程,更是提升用户体验和业务转化率的关键。然而,传统的客服评分方式,往往依赖于人工抽检和基于简单规则的判…...

漫画收藏家的智能解决方案:Comics Downloader开源工具全解析
漫画收藏家的智能解决方案:Comics Downloader开源工具全解析 【免费下载链接】comics-downloader tool to download comics and manga in pdf/epub/cbr/cbz from a website 项目地址: https://gitcode.com/gh_mirrors/co/comics-downloader 在数字阅读时代&a…...

突破群晖硬盘限制:Synology HDD db工具全解析
突破群晖硬盘限制:Synology HDD db工具全解析 【免费下载链接】Synology_HDD_db 项目地址: https://gitcode.com/GitHub_Trending/sy/Synology_HDD_db 设备兼容性问题一直是群晖NAS用户面临的主要挑战之一,尤其是第三方硬盘无法识别或无法创建存…...
translategemma-27b-it实战:本地部署图文翻译模型,轻松制作视频字幕
Translategemma-27b-it实战:本地部署图文翻译模型,轻松制作视频字幕 1. 为什么选择translategemma-27b-it做字幕翻译 视频字幕制作一直是内容创作者面临的挑战。传统方法需要先提取视频中的文字,再使用翻译工具处理,整个过程繁琐…...

构建自动化Kubernetes集群健康检查的终极工作流:Popeye与CI/CD的完美集成指南
构建自动化Kubernetes集群健康检查的终极工作流:Popeye与CI/CD的完美集成指南 【免费下载链接】popeye 👀 A Kubernetes cluster resource sanitizer 项目地址: https://gitcode.com/gh_mirrors/po/popeye Popeye是一款强大的Kubernetes集群资源清…...

AI净界RMBG-1.4在电商场景的应用:主图换底、素材制作全搞定
AI净界RMBG-1.4在电商场景的应用:主图换底、素材制作全搞定 1. 电商视觉优化的核心痛点 在电商运营中,商品图片的质量直接影响转化率。数据显示,专业级商品图能提升30%以上的点击率。然而,传统图片处理流程存在三大难题…...