【STM32嵌入式系统设计与开发】——16InputCapture(输入捕获应用)
这里写目录标题
- STM32资料包: 百度网盘下载链接:链接:https://pan.baidu.com/s/1mWx9Asaipk-2z9HY17wYXQ?pwd=8888 提取码:8888
- 一、任务描述
- 二、任务实施
- 1、工程文件夹创建
- 2、函数编辑
- (1)主函数编辑
- (2)USART1初始化函数(usart1_init())
- (3)USART数据发送函数( USART1_Send_Data())
- (4)USART数据发送函数( USART1_IRQHandler())
- (5)定时器5通道1输入捕获配置函数( TIM5_Cap_Init(uint16_t arr,uint16_t psc))
- (6)定时器5通道1输入捕获配置函数( TIM5_Cap_Init(uint16_t arr,uint16_t psc))
- 3、宏定义
- 输入捕获头文件编辑
- 4、知识链接
- (1)输入捕获基础知识
- (2)输入捕获通俗理解
- 5、工程测试
STM32资料包:
百度网盘下载链接:链接:https://pan.baidu.com/s/1mWx9Asaipk-2z9HY17wYXQ?pwd=8888
提取码:8888
一、任务描述
二、任务实施
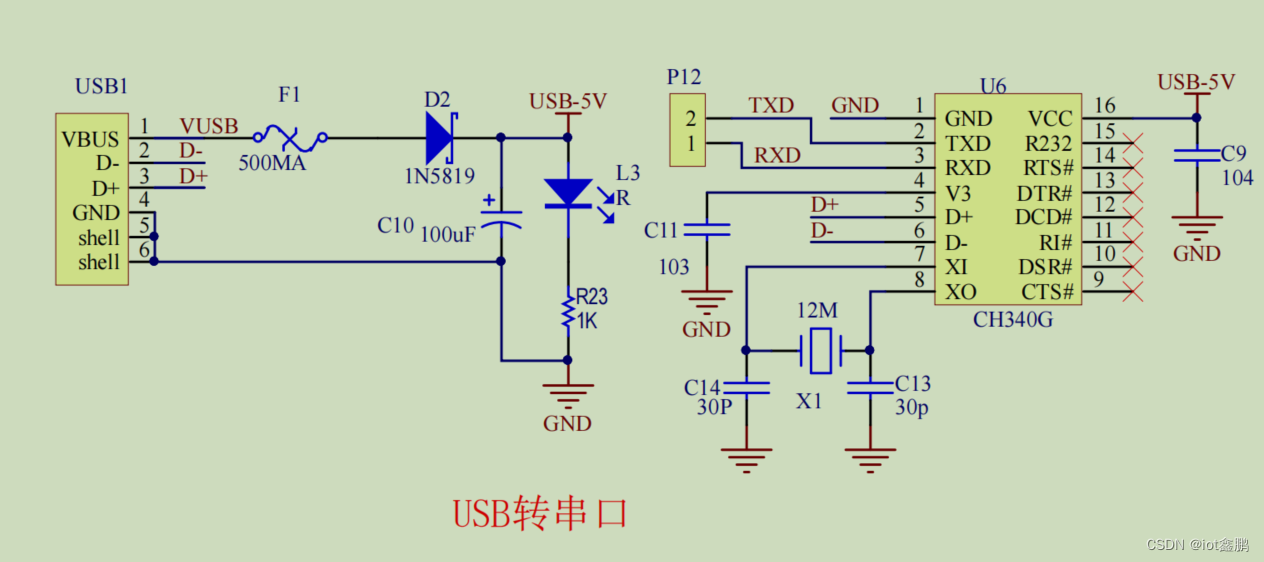
观察电路图:
TXD(底板) ————————> PA10
RXD(底板) ————————> PA9
DK1 (底板) ————————> PA0
使用USB-AB型数据线,连接15核心板USB口,串口发送接收到的数据。实现了STM32定时器的输入捕获功能,用于捕获外部信号的时间戳。
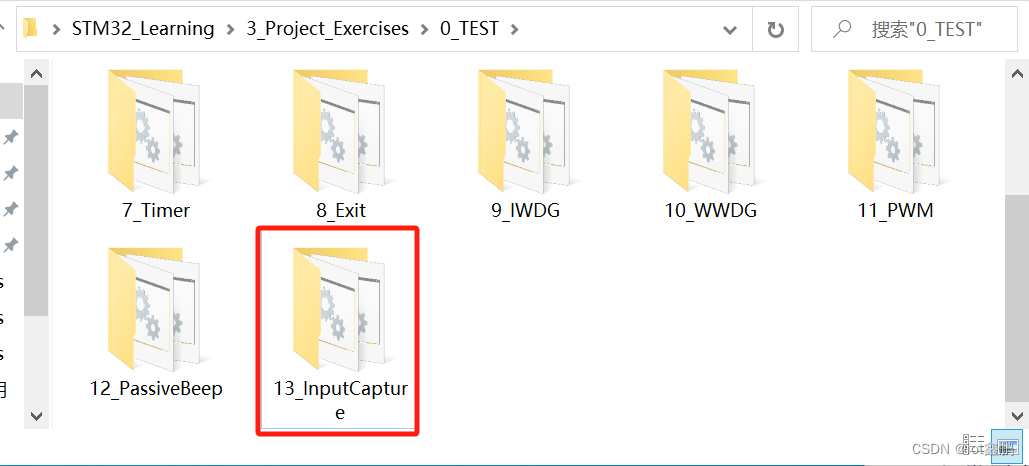
1、工程文件夹创建
步骤1:复制工程模板“1_Template”重命名为“13_PassiveBeep”。
步骤2:修改项目工程名,先删除projects文件夹内除了Template.uvprojx文件外的所有内容并修改为“.uvprojx”。并删除output/obj和output/lst中的所有文件。

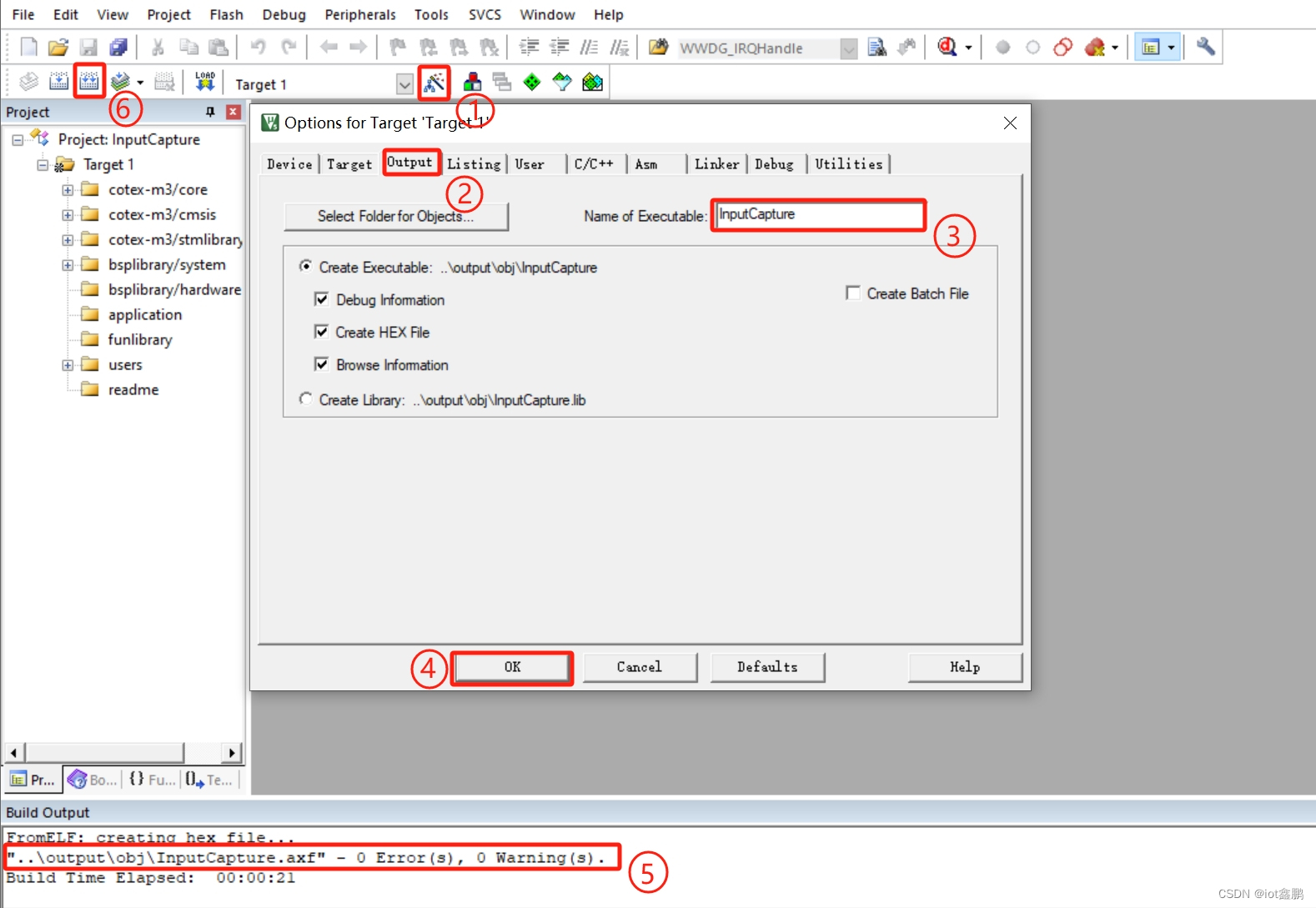
步骤3:运行“PassiveBeep.uvprojx”打开目标选项“Options for Target”中的“Output”输出文件,并修改可执行文件名称为“PWM”点击“OK”保存设置。最后点击“Rebuild”编译该工程生成Usart文件。
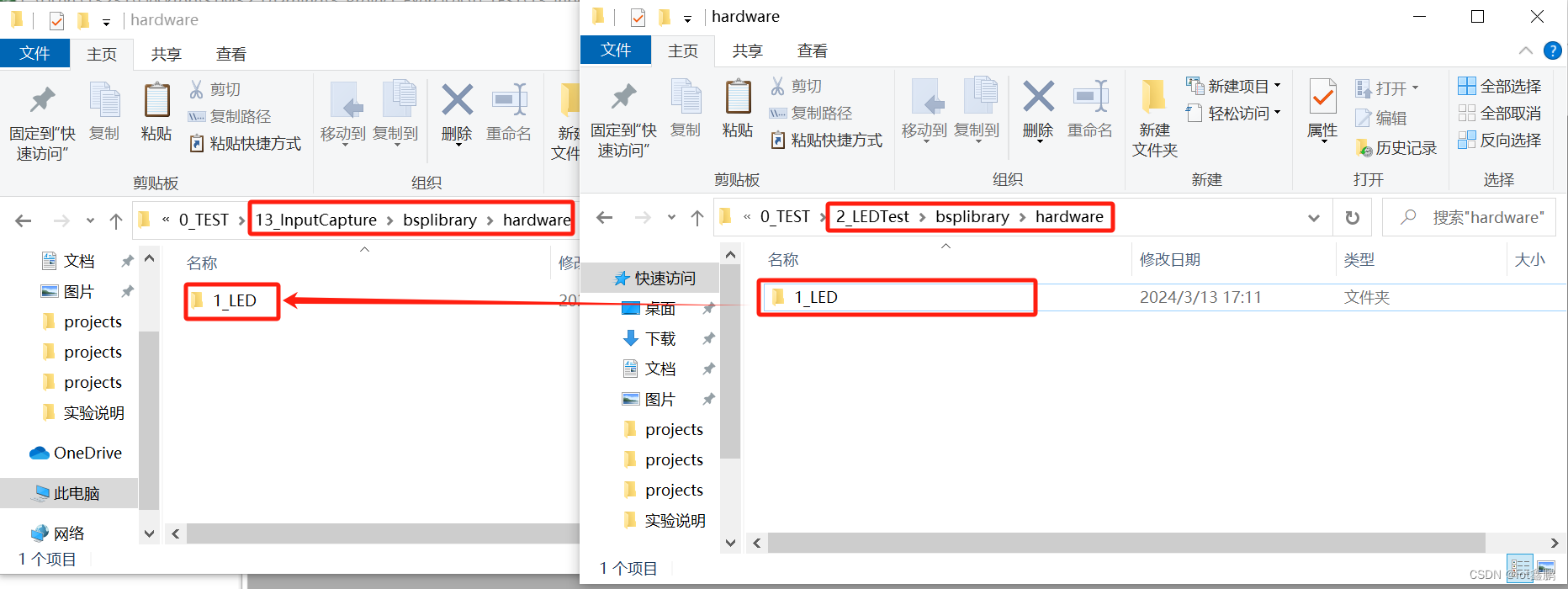
步骤4:复制2_LEDTest中的"1_LED"和文件复制到hardware中。
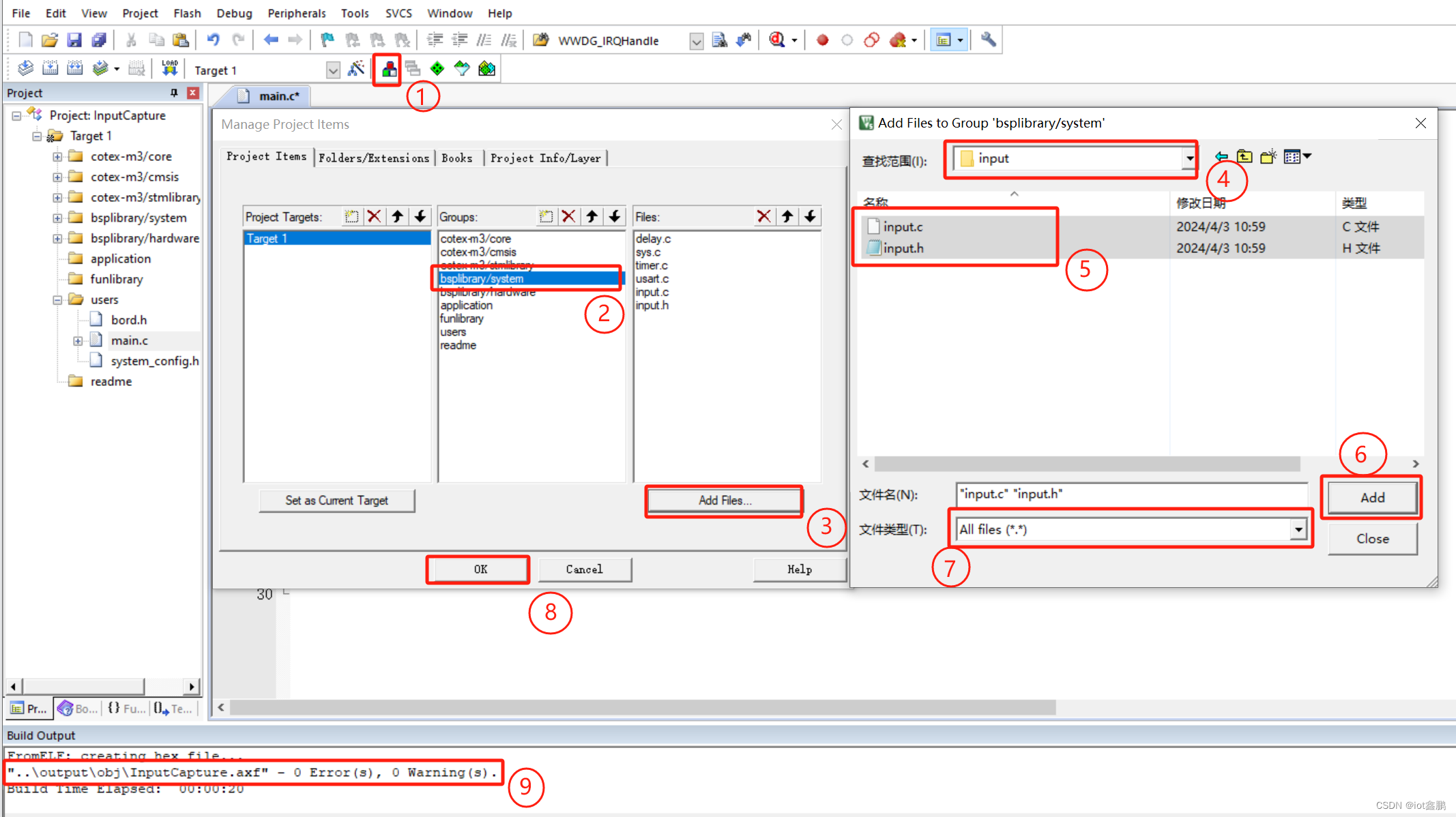
步骤5:在system文件夹中新建一个input文件夹并在该文件夹下新建input.c和input.h两个文件。

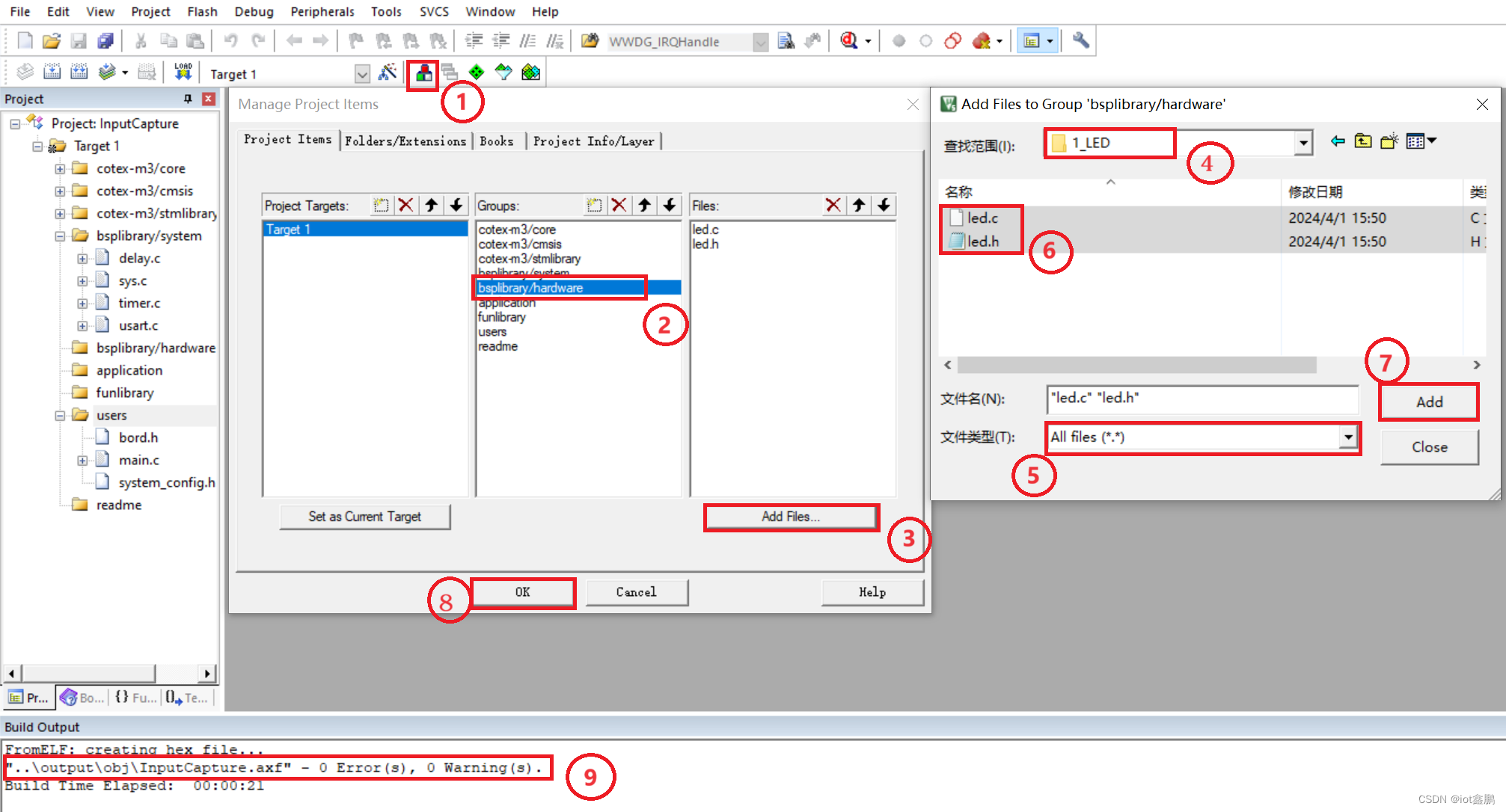
步骤5:工程组文件中添加“led”文件夹内的所有文件。
步骤6:工程组文件中添加“input”文件夹内的所有文件。
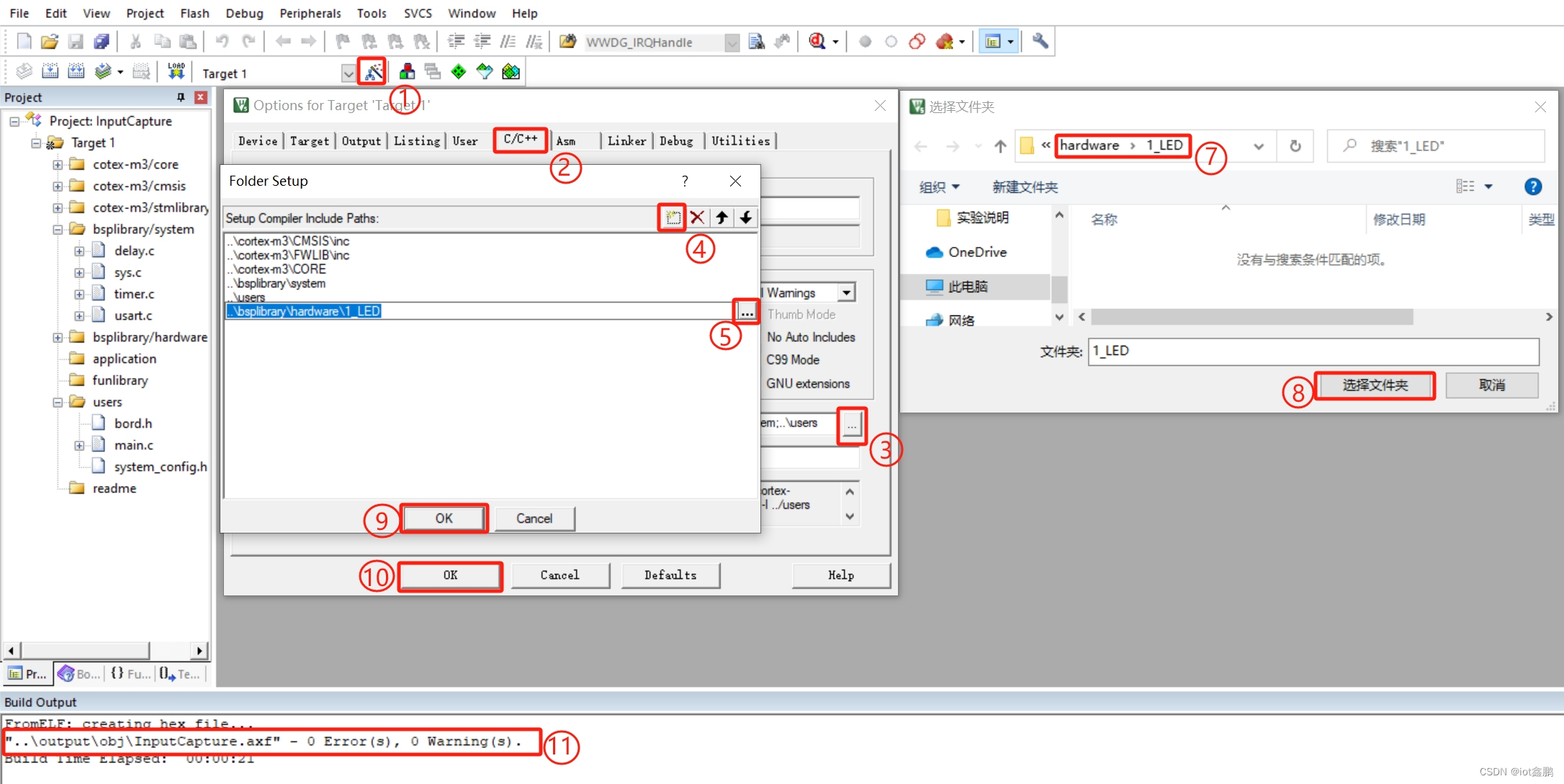
步骤6:目标选项添加添加头文件路径。
2、函数编辑
(1)主函数编辑
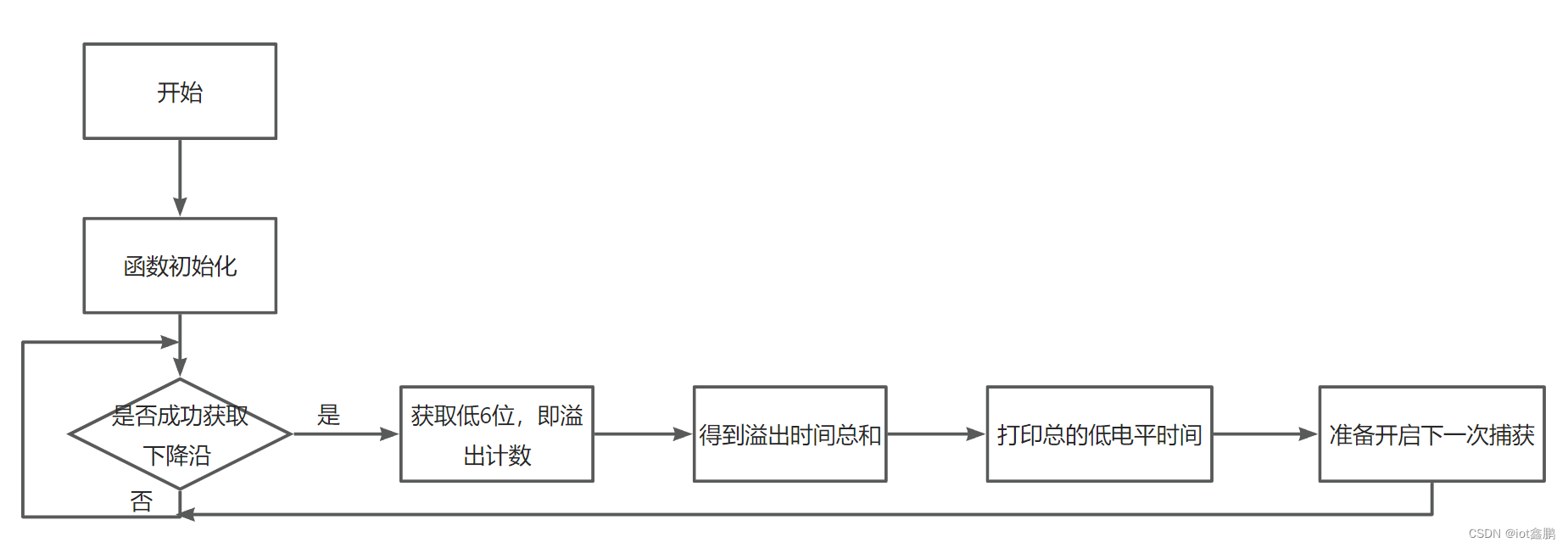
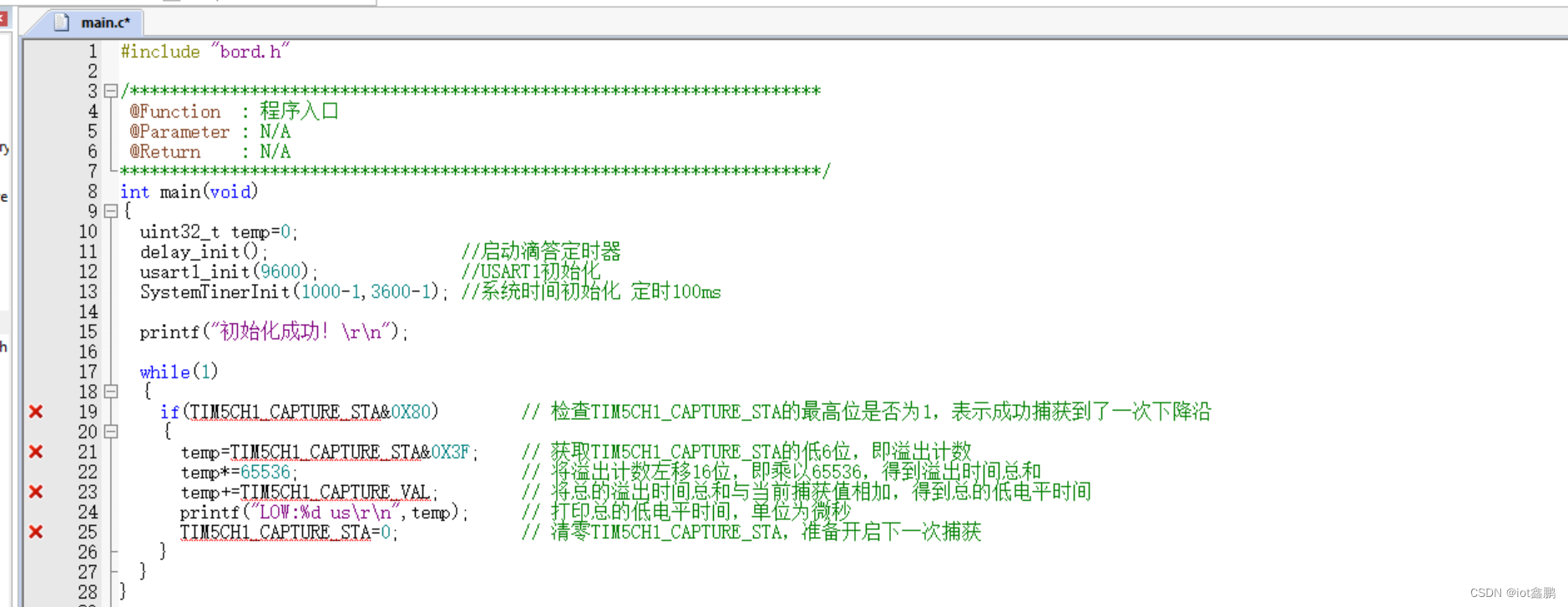
基于STM32的输入捕获功能,通过定时器5捕获外部信号的下降沿,并计算低电平的总时间,然后通过USART1串口打印输出。
步骤2:实现一个简单的计时器,并在每秒打印一次计时信息。利用LED状态的改变来指示系统正在运行。
while(1) {if(TIM5CH1_CAPTURE_STA&0X80) // 检查TIM5CH1_CAPTURE_STA的最高位是否为1,表示成功捕获到了一次下降沿{temp=TIM5CH1_CAPTURE_STA&0X3F; // 获取TIM5CH1_CAPTURE_STA的低6位,即溢出计数temp*=65536; // 将溢出计数左移16位,即乘以65536,得到溢出时间总和temp+=TIM5CH1_CAPTURE_VAL; // 将总的溢出时间总和与当前捕获值相加,得到总的低电平时间printf("LOW:%d us\r\n",temp); // 打印总的低电平时间,单位为微秒TIM5CH1_CAPTURE_STA=0; // 清零TIM5CH1_CAPTURE_STA,准备开启下一次捕获} }
(2)USART1初始化函数(usart1_init())
配置了 PA9 为复用推挽输出,用于 USART1 的 TXD,并配置了 PA10 为浮空输入,用于 USART1 的 RXD。并配置了 USART1 的参数,包括波特率、数据位长度、停止位数、校验位、硬件流控制和工作模式。
/*********************************************************************@Function : USART1初始化@Parameter : bound : 波特率 @Return : N/A
**********************************************************************/
void usart1_init(uint32_t bound)
{GPIO_InitTypeDef GPIO_InitStructure; // 定义 GPIO 初始化结构体USART_InitTypeDef USART_InitStructure; // 定义 USART 初始化结构体NVIC_InitTypeDef NVIC_InitStructure; // 定义 NVIC 初始化结构体/* 时钟使能:启用 USART1 和 GPIOA 的时钟 */RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);/* 引脚复用配置 */ // 配置 PA9 为复用推挽输出,用于 USART1 的 TXDGPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; // 设置 GPIO 端口GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 设置 GPIO 速度GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 设置 GPIO 模式为复用推挽GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化 GPIO// 配置 PA10 为浮空输入,用于 USART1 的 RXDGPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; // 设置 GPIO 端口GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; // 设置 GPIO 模式为浮空输入GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化 GPIO/* NVIC 中断配置 */ NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; // 设置中断通道为 USART1NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3; // 设置抢占优先级为3NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; // 设置子优先级为3NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 使能中断通道NVIC_Init(&NVIC_InitStructure); // 初始化 NVIC/* USART1 配置 */ USART_InitStructure.USART_BaudRate = bound; // 设置波特率USART_InitStructure.USART_WordLength = USART_WordLength_8b; // 设置数据位长度为8位USART_InitStructure.USART_StopBits = USART_StopBits_1; // 设置停止位为1位USART_InitStructure.USART_Parity = USART_Parity_No; // 设置校验位为无校验USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 设置硬件流控制为无USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 设置工作模式为接收和发送USART_Init(USART1, &USART_InitStructure); // 初始化 USART1/*中断配置*/USART_ITConfig(USART1,USART_IT_RXNE,ENABLE); //开接受中断 USART_ITConfig(USART1,USART_IT_IDLE,ENABLE); //开空闲中断USART_ITConfig(USART1,USART_IT_TXE,ENABLE); //开发送中断 USART_Cmd(USART1, ENABLE); //启用USART1USART_DataTypeStr.Usart_Tc_State = SET; //置位发送允许标志
}

(3)USART数据发送函数( USART1_Send_Data())
初始化PD14端口,并为推挽输出。
/*********************************************************************@Function : USART数据发送函数@Parameter : Data :要发送的数据缓存.Lenth :发送长度@Return : 发送状态 1 :失败 0 :成功
**********************************************************************/
char USART1_Send_Data(char* Data,uint8_t Lenth)
{uint8_t uNum = 0;if(USART_DataTypeStr.Usart_Tc_State == 1) //判断发送标志位是否置1{USART_DataTypeStr.Usart_Tc_State = 0; //将发送标志位清零,表示数据已经成功放入缓存,等待发送USART_DataTypeStr.Usart_Tx_Len = Lenth; //获取需要发送的数据的长度 for(uNum = 0;uNum < USART_DataTypeStr.Usart_Tx_Len;uNum ++) //将需要发送的数据放入发送缓存{USART_DataTypeStr.Usart_Tx_Buffer[uNum] = Data[uNum];}USART_ITConfig(USART1,USART_IT_TXE,ENABLE); //数据放入缓存后打开发送中断,数据自动发送}return USART_DataTypeStr.Usart_Tc_State; //返回放数据的状态值,为1表示发送失败,为0表示发送成功了
}
(4)USART数据发送函数( USART1_IRQHandler())
/*********************************************************************@Function : USART1中断服务函数@Parameter : N/A @Return : N/A
**********************************************************************/
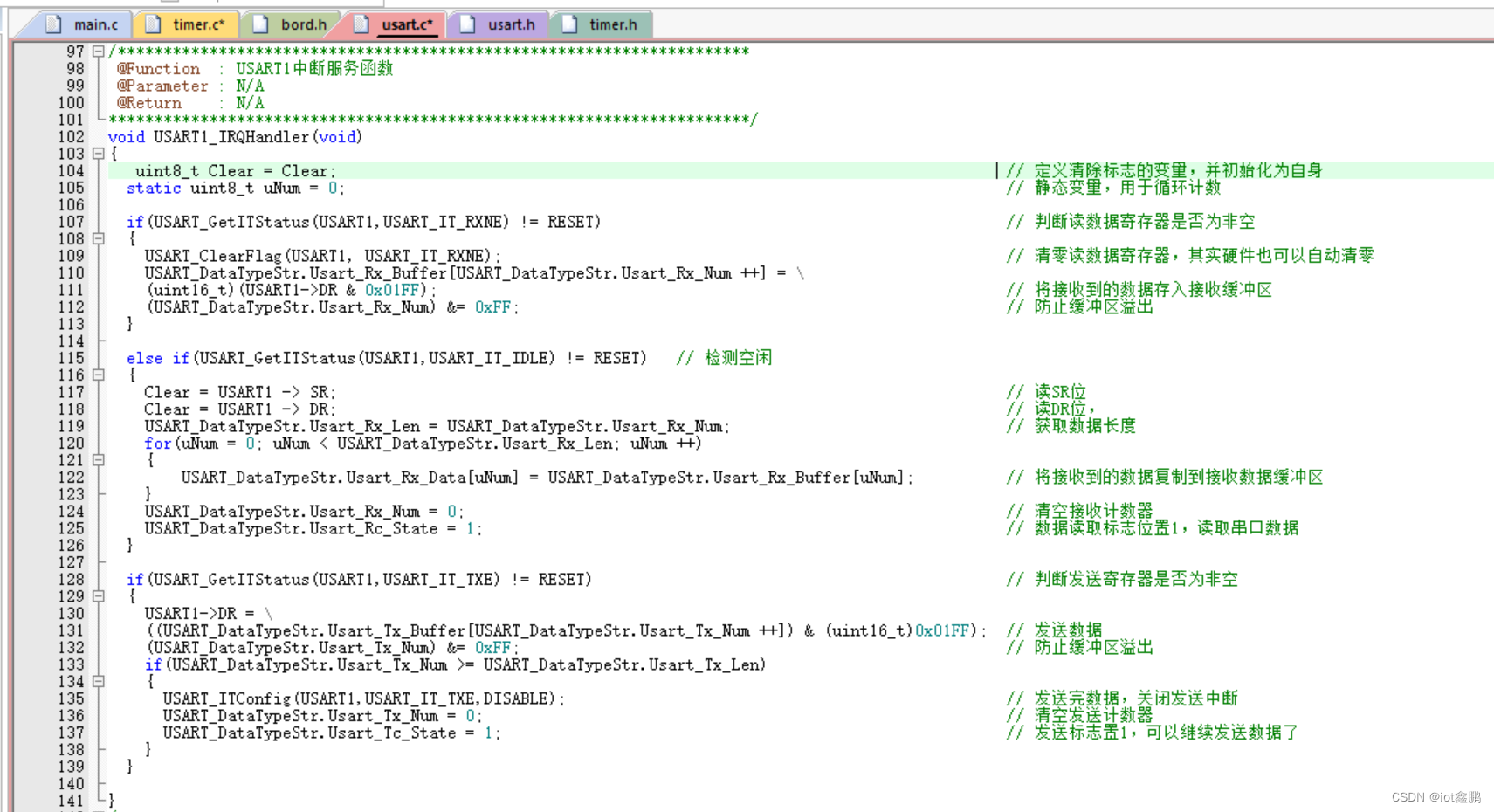
void USART1_IRQHandler(void)
{uint8_t Clear = Clear; // 定义清除标志的变量,并初始化为自身static uint8_t uNum = 0; // 静态变量,用于循环计数if(USART_GetITStatus(USART1,USART_IT_RXNE) != RESET) // 判断读数据寄存器是否为非空{USART_ClearFlag(USART1, USART_IT_RXNE); // 清零读数据寄存器,其实硬件也可以自动清零USART_DataTypeStr.Usart_Rx_Buffer[USART_DataTypeStr.Usart_Rx_Num ++] = \(uint16_t)(USART1->DR & 0x01FF); // 将接收到的数据存入接收缓冲区(USART_DataTypeStr.Usart_Rx_Num) &= 0xFF; // 防止缓冲区溢出} else if(USART_GetITStatus(USART1,USART_IT_IDLE) != RESET) // 检测空闲{Clear = USART1 -> SR; // 读SR位Clear = USART1 -> DR; // 读DR位,USART_DataTypeStr.Usart_Rx_Len = USART_DataTypeStr.Usart_Rx_Num; // 获取数据长度for(uNum = 0; uNum < USART_DataTypeStr.Usart_Rx_Len; uNum ++) {USART_DataTypeStr.Usart_Rx_Data[uNum] = USART_DataTypeStr.Usart_Rx_Buffer[uNum]; // 将接收到的数据复制到接收数据缓冲区}USART_DataTypeStr.Usart_Rx_Num = 0; // 清空接收计数器USART_DataTypeStr.Usart_Rc_State = 1; // 数据读取标志位置1,读取串口数据}if(USART_GetITStatus(USART1,USART_IT_TXE) != RESET) // 判断发送寄存器是否为非空{USART1->DR = \((USART_DataTypeStr.Usart_Tx_Buffer[USART_DataTypeStr.Usart_Tx_Num ++]) & (uint16_t)0x01FF); // 发送数据(USART_DataTypeStr.Usart_Tx_Num) &= 0xFF; // 防止缓冲区溢出if(USART_DataTypeStr.Usart_Tx_Num >= USART_DataTypeStr.Usart_Tx_Len){ USART_ITConfig(USART1,USART_IT_TXE,DISABLE); // 发送完数据,关闭发送中断USART_DataTypeStr.Usart_Tx_Num = 0; // 清空发送计数器USART_DataTypeStr.Usart_Tc_State = 1; // 发送标志置1,可以继续发送数据了} }}
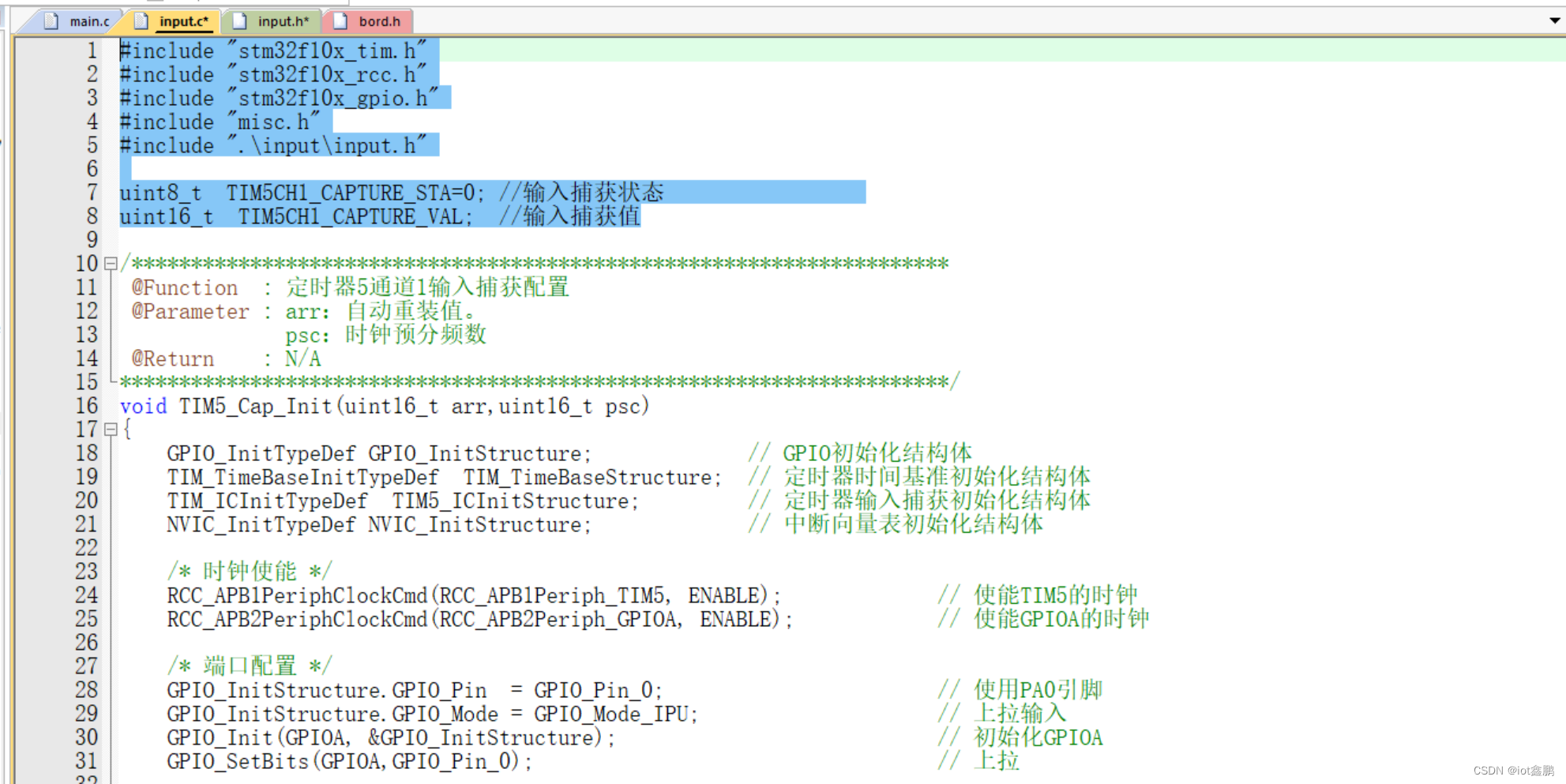
(5)定时器5通道1输入捕获配置函数( TIM5_Cap_Init(uint16_t arr,uint16_t psc))
/*********************************************************************@Function : 定时器5通道1输入捕获配置@Parameter : arr:自动重装值。psc:时钟预分频数@Return : N/A
**********************************************************************/
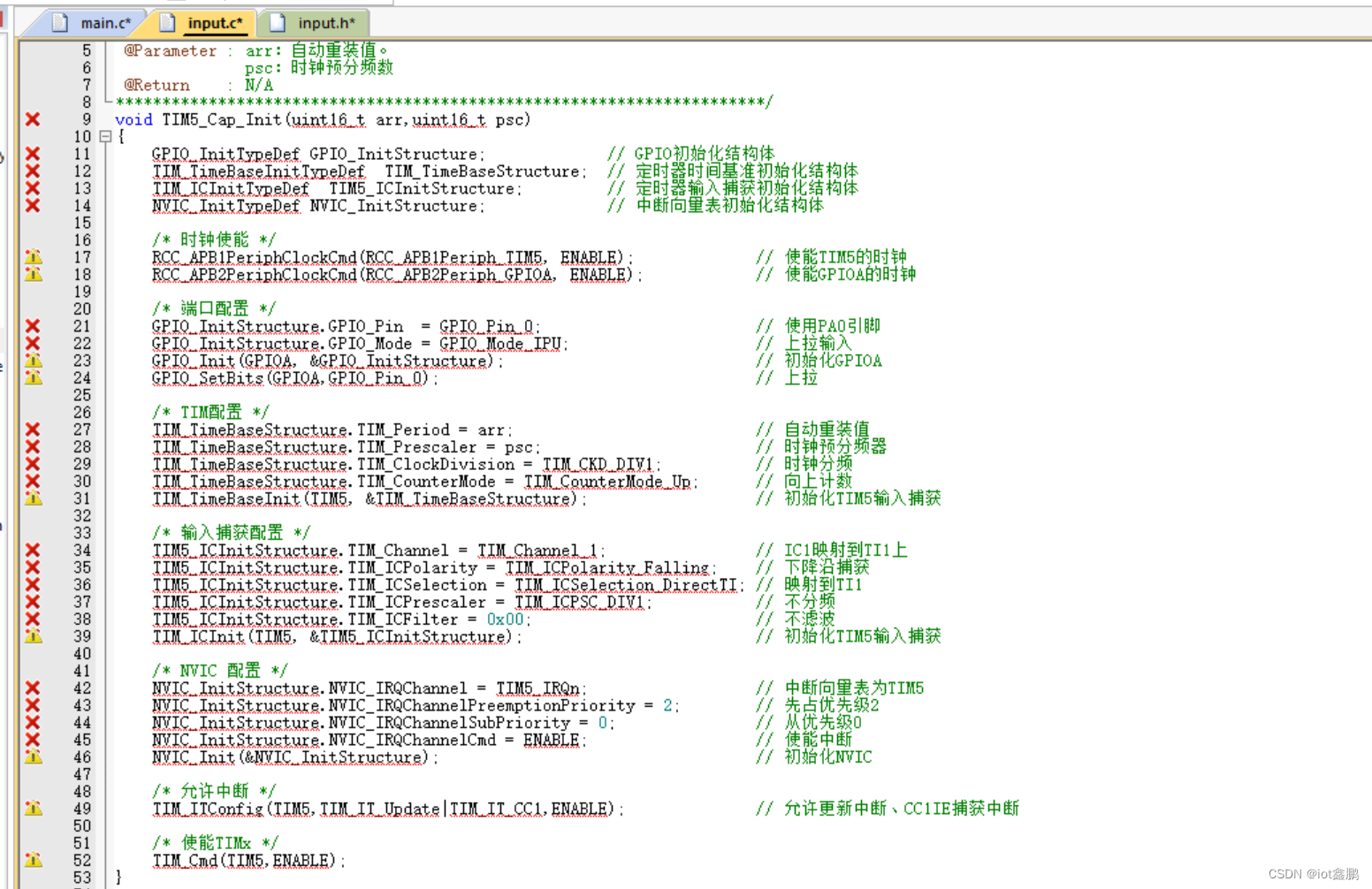
void TIM5_Cap_Init(uint16_t arr,uint16_t psc)
{ GPIO_InitTypeDef GPIO_InitStructure; // GPIO初始化结构体TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; // 定时器时间基准初始化结构体TIM_ICInitTypeDef TIM5_ICInitStructure; // 定时器输入捕获初始化结构体NVIC_InitTypeDef NVIC_InitStructure; // 中断向量表初始化结构体/* 时钟使能 */RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5, ENABLE); // 使能TIM5的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); // 使能GPIOA的时钟/* 端口配置 */GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; // 使用PA0引脚 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // 上拉输入 GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化GPIOAGPIO_SetBits(GPIOA,GPIO_Pin_0); // 上拉/* TIM配置 */ TIM_TimeBaseStructure.TIM_Period = arr; // 自动重装值 TIM_TimeBaseStructure.TIM_Prescaler = psc; // 时钟预分频器 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 时钟分频TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数TIM_TimeBaseInit(TIM5, &TIM_TimeBaseStructure); // 初始化TIM5输入捕获/* 输入捕获配置 */ TIM5_ICInitStructure.TIM_Channel = TIM_Channel_1; // IC1映射到TI1上TIM5_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Falling; // 下降沿捕获TIM5_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; // 映射到TI1TIM5_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; // 不分频 TIM5_ICInitStructure.TIM_ICFilter = 0x00; // 不滤波TIM_ICInit(TIM5, &TIM5_ICInitStructure); // 初始化TIM5输入捕获/* NVIC 配置 */NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn; // 中断向量表为TIM5NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; // 先占优先级2NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; // 从优先级0NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 使能中断NVIC_Init(&NVIC_InitStructure); // 初始化NVIC/* 允许中断 */TIM_ITConfig(TIM5,TIM_IT_Update|TIM_IT_CC1,ENABLE); // 允许更新中断、CC1IE捕获中断 /* 使能TIMx */TIM_Cmd(TIM5,ENABLE);
}
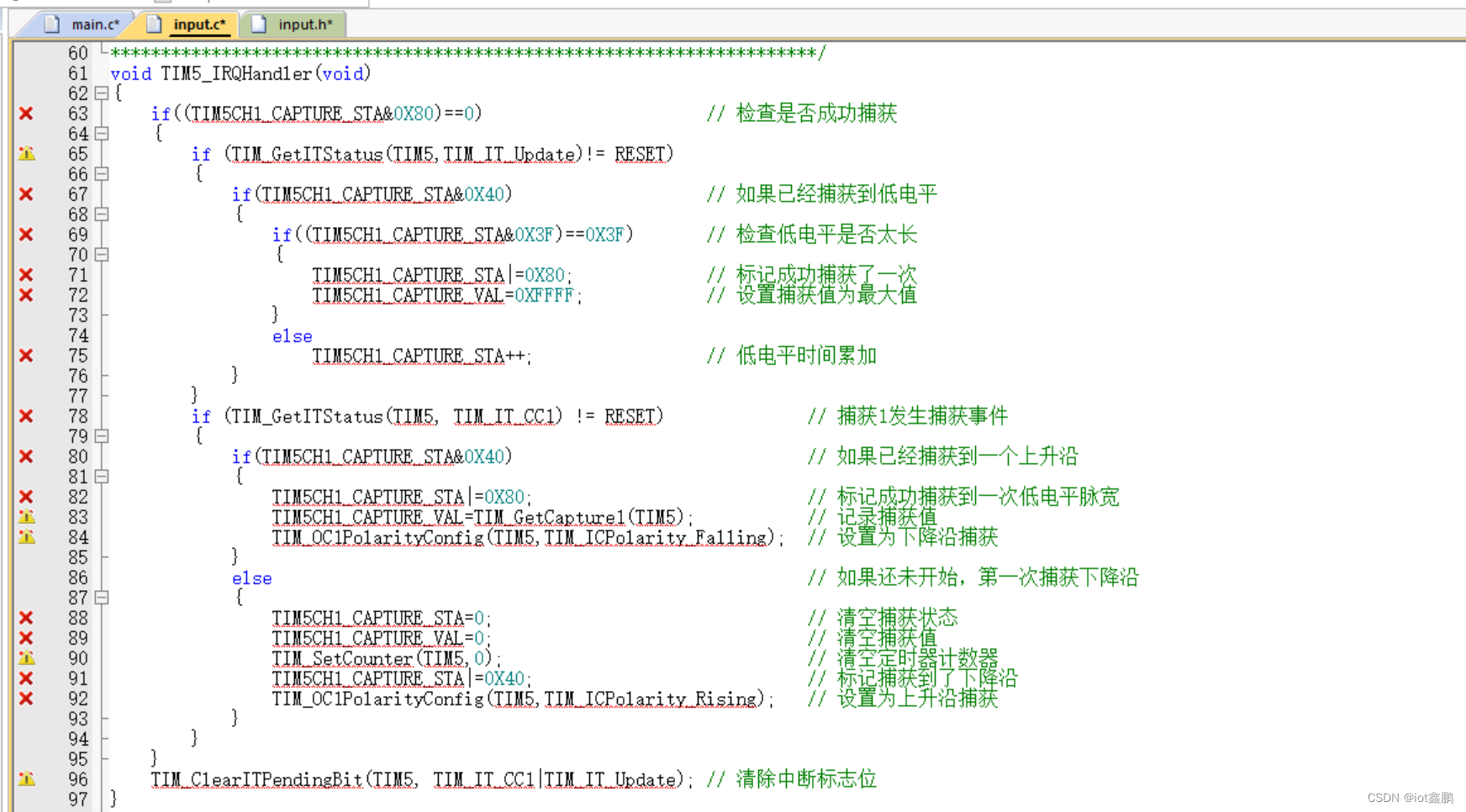
(6)定时器5通道1输入捕获配置函数( TIM5_Cap_Init(uint16_t arr,uint16_t psc))
/*********************************************************************@Function : 定时器5中断服务程序 @Parameter : N/A@Return : N/A
**********************************************************************/
void TIM5_IRQHandler(void)
{ if((TIM5CH1_CAPTURE_STA&0X80)==0) // 检查是否成功捕获{ if (TIM_GetITStatus(TIM5,TIM_IT_Update)!= RESET) { if(TIM5CH1_CAPTURE_STA&0X40) // 如果已经捕获到低电平{if((TIM5CH1_CAPTURE_STA&0X3F)==0X3F) // 检查低电平是否太长{TIM5CH1_CAPTURE_STA|=0X80; // 标记成功捕获了一次TIM5CH1_CAPTURE_VAL=0XFFFF; // 设置捕获值为最大值}elseTIM5CH1_CAPTURE_STA++; // 低电平时间累加} }if (TIM_GetITStatus(TIM5, TIM_IT_CC1) != RESET) // 捕获1发生捕获事件{ if(TIM5CH1_CAPTURE_STA&0X40) // 如果已经捕获到一个上升沿 { TIM5CH1_CAPTURE_STA|=0X80; // 标记成功捕获到一次低电平脉宽TIM5CH1_CAPTURE_VAL=TIM_GetCapture1(TIM5); // 记录捕获值TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Falling); // 设置为下降沿捕获}else // 如果还未开始,第一次捕获下降沿{TIM5CH1_CAPTURE_STA=0; // 清空捕获状态TIM5CH1_CAPTURE_VAL=0; // 清空捕获值TIM_SetCounter(TIM5,0); // 清空定时器计数器TIM5CH1_CAPTURE_STA|=0X40; // 标记捕获到了下降沿TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Rising); // 设置为上升沿捕获} } }TIM_ClearITPendingBit(TIM5, TIM_IT_CC1|TIM_IT_Update); // 清除中断标志位
}
3、宏定义
步骤1:主函数添加所需的头文件,主源文件部分报错消失
//头文件包含
/*************SYSTEM*****************/
/*#include ".\sys\sys.h"*/
#include ".\delay\delay.h"
#include ".\usart\usart.h"
#include ".\timer\timer.h"
#include ".\input\input.h"/***********Hardweare***************/
#include "led.h"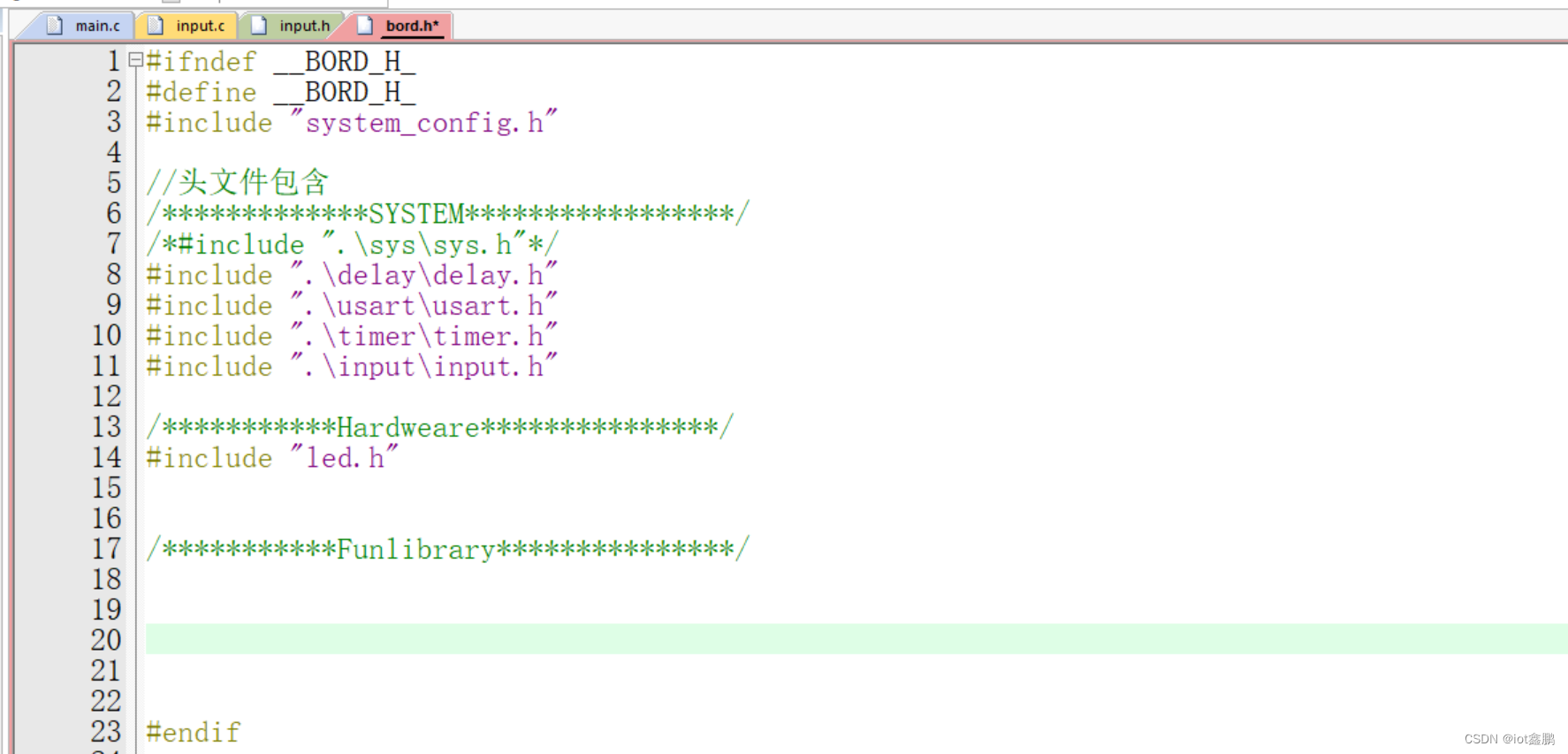
步骤2:添加函数声明
uint32_t temp=0; delay_init(); //启动滴答定时器usart1_init(9600); //USART1初始化LED_Init(); //板载LED初始化SystemTinerInit(1000-1,7200-1); //系统时间初始化 定时100msTIM5_Cap_Init(0XFFFF,72-1); //以1Mhz的频率计数printf("初始化成功!\r\n");

步骤2:添加中断源文件所需的头文件
#include "stm32f10x_tim.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_gpio.h"
#include "misc.h"
#include ".\input\input.h"uint8_t TIM5CH1_CAPTURE_STA=0; //输入捕获状态
uint16_t TIM5CH1_CAPTURE_VAL; //输入捕获值
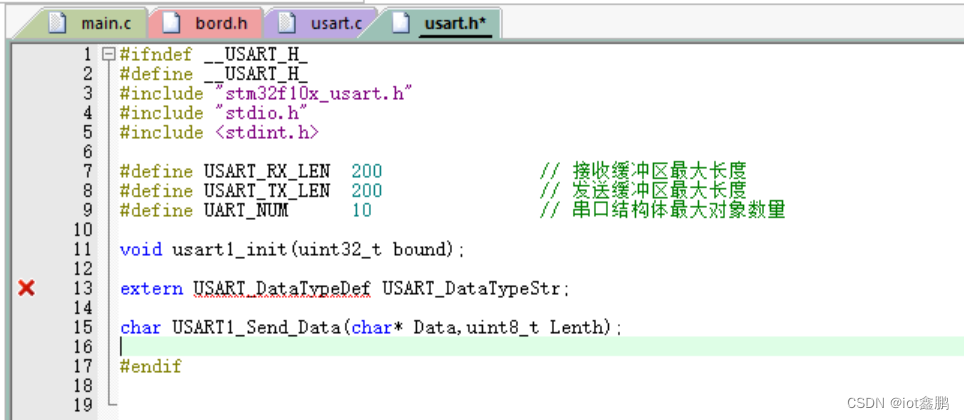
步骤3:添加串口通信宏定义
#define USART_RX_LEN 200 // 接收缓冲区最大长度
#define USART_TX_LEN 200 // 发送缓冲区最大长度
#define UART_NUM 10 // 串口结构体最大对象数量

步骤4:添加函数声明
void usart1_init(uint32_t bound);
extern USART_DataTypeDef USART_DataTypeStr;
char USART1_Send_Data(char* Data,uint8_t Lenth);
步骤5:添加数据类型和宏的头文件
//定义串口数据结构体
typedef struct USART_DataType
{uint8_t Usart_Rx_Len; // 接收缓冲区长度uint8_t Usart_Tx_Len; // 发送缓冲区长度uint8_t Usart_Rx_Num; // 接收数据计数uint8_t Usart_Tx_Num; // 发送数据计数uint8_t Usart_Rc_State; // 接收状态标志位uint8_t Usart_Tc_State; // 发送状态标志位char Usart_Rx_Buffer[USART_RX_LEN]; // 接收缓冲区char Usart_Tx_Buffer[USART_TX_LEN]; // 发送缓冲区char Usart_Rx_Data[USART_RX_LEN]; // 接收数据char Usart_Tx_Data[USART_TX_LEN]; // 发送数据
} USART_DataTypeDef;
步骤6:定义一个串口数组变量
USART_DataTypeDef USART_DataTypeStr={0};
输入捕获头文件编辑
步骤1:创建一个宏定义保护
#ifndef __INPUT_H_
#define __INPUT_H_#endif
步骤2:添加函数声明
//函数声明
void TIM5_Cap_Init(uint16_t arr,uint16_t psc);

步骤3:添加数据类型和宏的头文件
#include <stdint.h> extern uint8_t TIM5CH1_CAPTURE_STA;
extern uint16_t TIM5CH1_CAPTURE_VAL;
4、知识链接
(1)输入捕获基础知识
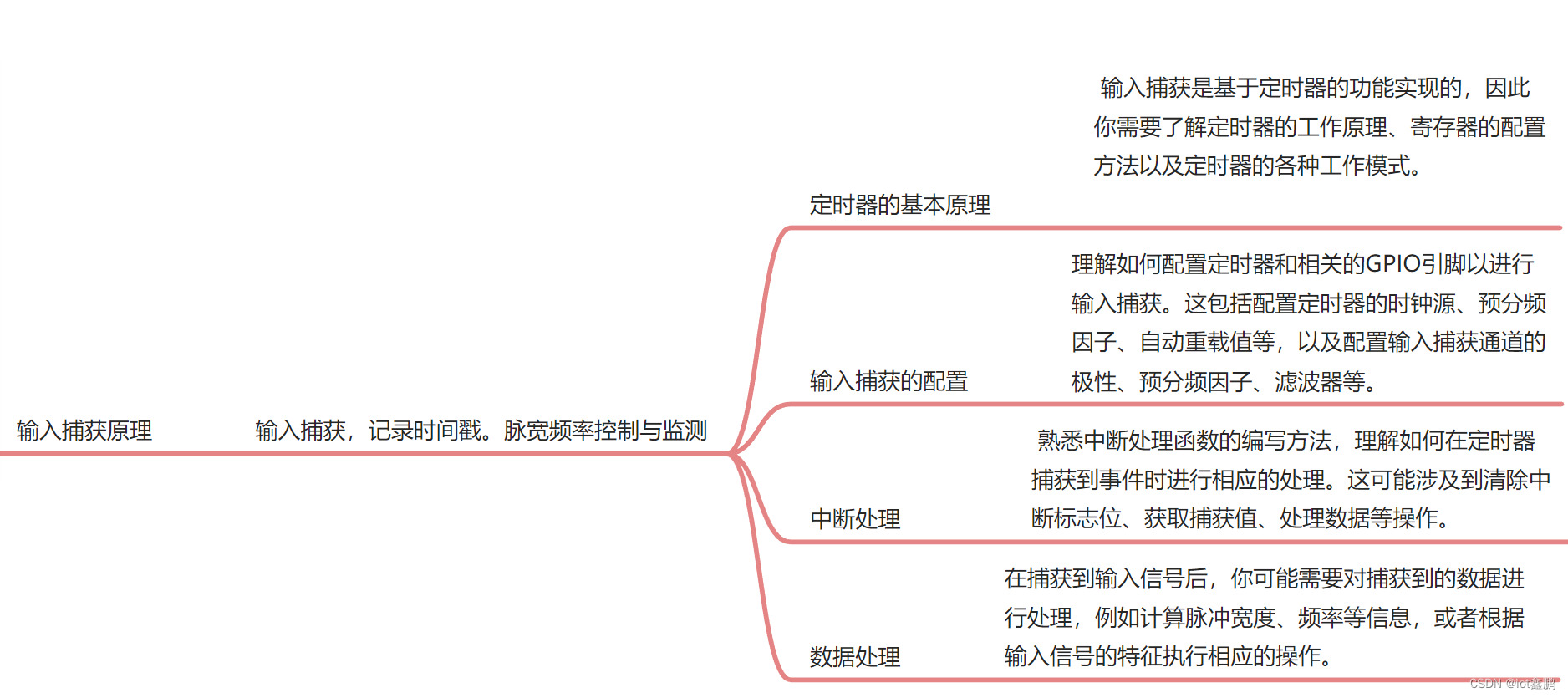
(2)输入捕获通俗理解
输入捕获就像是在厨房里用计时器来测量不同食材烹饪的时间。比如,你可以用计时器来记录水煮沸的时间、面团发酵的时间或者烤箱中食物的烹饪时间。这样,你就可以根据时间来控制不同的烹饪过程,确保食物煮熟或者烤熟得恰到好处。输入捕获就像是厨房里的计时器一样,可以帮助你测量外部信号的特征,比如脉冲宽度、频率或时间间隔,用于控制和监测不同的烹饪过程。
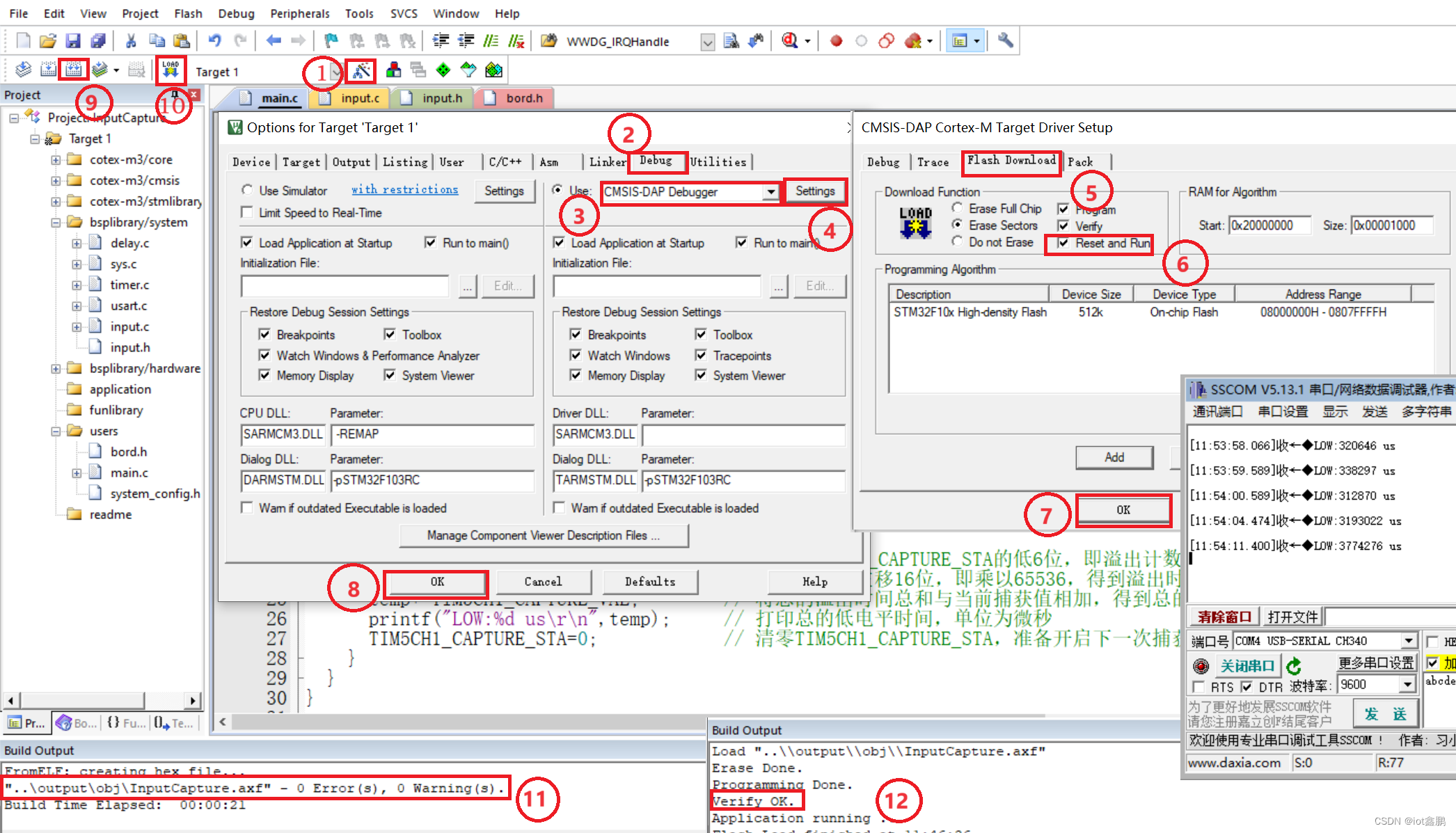
5、工程测试
相关文章:
【STM32嵌入式系统设计与开发】——16InputCapture(输入捕获应用)
这里写目录标题 STM32资料包: 百度网盘下载链接:链接:https://pan.baidu.com/s/1mWx9Asaipk-2z9HY17wYXQ?pwd8888 提取码:8888 一、任务描述二、任务实施1、工程文件夹创建2、函数编辑(1)主函数编辑&#…...

「论文阅读」还在手写Prompt,自动Prompt搜索超越人类水平
每周论文阅读笔记,来自于2023LARGE LANGUAGE MODELS ARE HUMAN-LEVEL PROMPT ENGINEERS code:https://github.com/keirp/automatic_prompt_engineer 手写prompt确实很费脑筋,但其实本身大语言模型就是一个很好的自动prompt工具,APE文章提出自…...
安全测试概述和用例设计
一、安全测试概述 定义:安全测试是在软件产品开发基本完成时,验证产品是否符合安全需求定义和产品质量标准的过程。 概念:安全测试是检查系统对非法侵入渗透的防范能力。 准则:理论上来讲,只要有足够的时间和资源&a…...

JavaScript 超详细学习思路
JavaScript 是一种轻量级的编程语言,它可以在网页中嵌入,用来实现网页的动态效果和用户交互功能。它是 Web 开发中不可或缺的一部分,与 HTML 和 CSS 并称为 Web 技术的三大基石。下面我会根据您的要求,对每个部分进行详细的讲解。…...
LeetCode:1483. 树节点的第 K 个祖先(倍增 Java)
目录 1483. 树节点的第 K 个祖先 题目描述: 实现代码与解析: 倍增 原理思路: 1483. 树节点的第 K 个祖先 题目描述: 给你一棵树,树上有 n 个节点,按从 0 到 n-1 编号。树以父节点数组的形式给出&#…...

ConstraintLayout在复杂布局中,出现卡顿问题解决记录
ConstraintLayout在画界面的过程中,确实带来了不少的方便,随着使用的越来越多,也发现了一些问题,特此记录一下问题和解决方案。 在背景为图片,而背景图片宽度固定高度自适应的情况下,布局显示在图片固定位…...

责任链模式详解+代码案例
责任链设计模式 定义: 又名职责链模式,为了避免请求发送者与多个请求处理者耦合在一起,将所有请求的处理者通过前一对象记住其下一个对象的引用而连成一条链;当有请求发生时,可将请求沿着这条链传递,直到…...

如何让Webots支持C#语言开发的控制器
Webots支持C、C、Java、Python、Matlab这五种语言开发控制器,没有直接支持C#,但有个同事已经用C#写了大量的机器人控制代码,想在不把C#代码改写成C的情况下,直接用webots仿真,那就得想想办法。(不过,让Chat…...
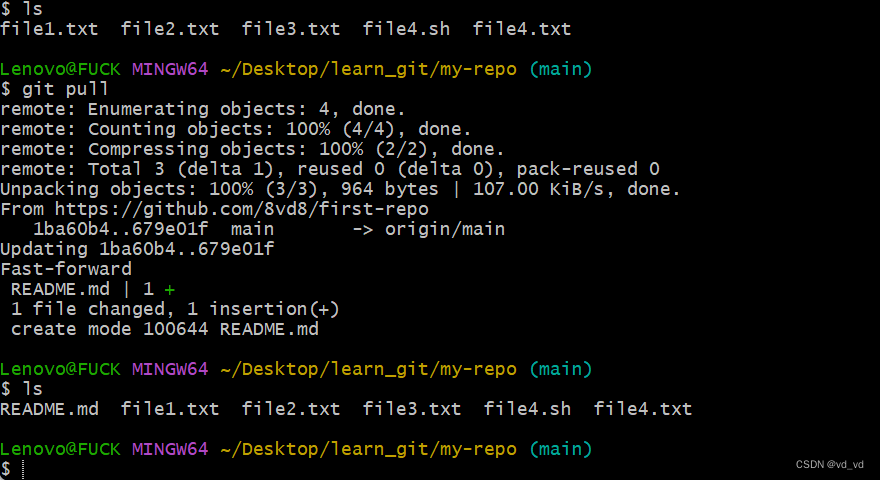
如何将本地仓库放到远程仓库中
在我们仓库创建好之后,我们复制好ssh 接着我们需要使用git remote add<shortname><url>这个命令 shortname就是我们远程仓库的别名 接着使用git remote -v这个命令查看一下目前远程仓库的别名和地址 原本还有一个指令git branch -M main 指定分支的名…...

Jedis-事务
一,Jedis 我们要使用Java来操作Redis Jedis是Redis官方推荐的java连接工具。使用Java操作Redis的中间件。如果你要使用Java操作redis,那么一定要对jedis十分的熟悉 二,idea 连接jedis 1,导入jar包 <dependencies><depen…...
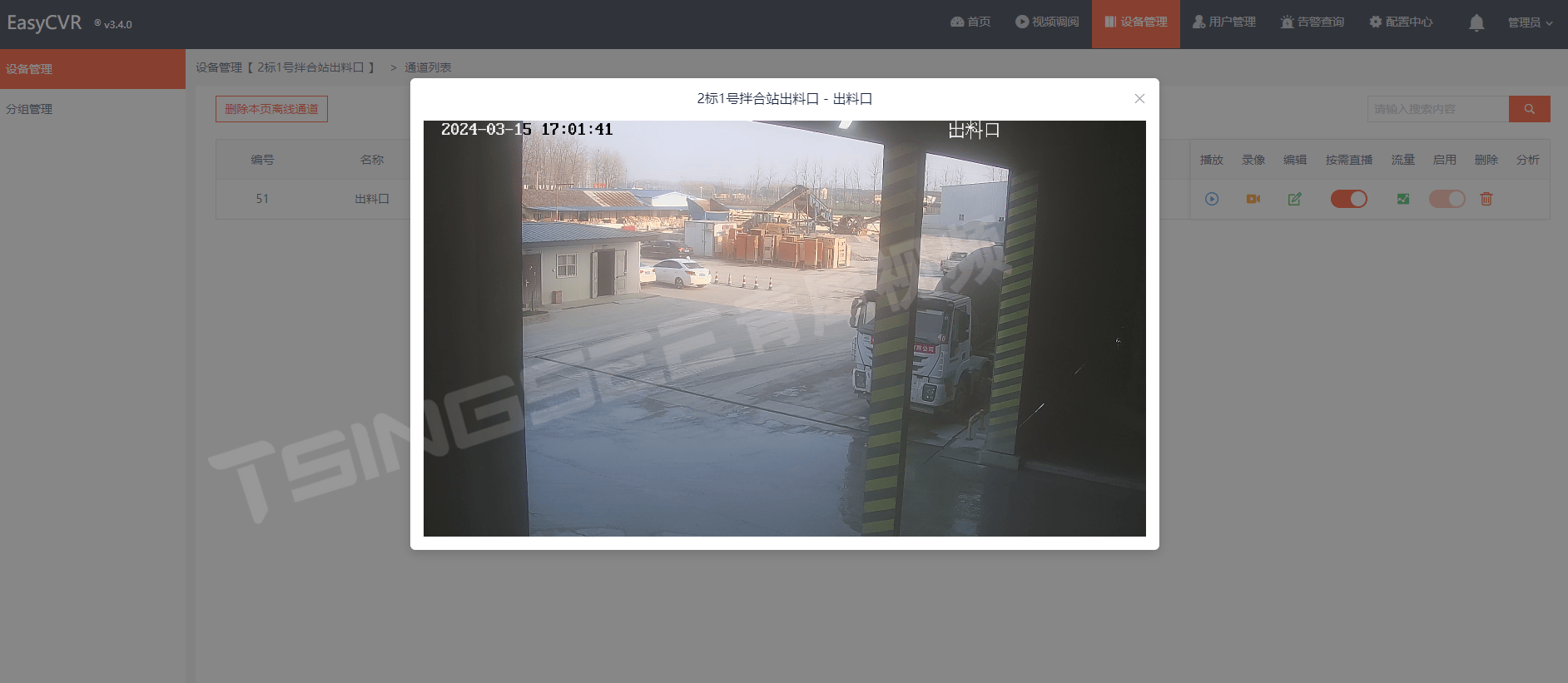
智慧安防监控EasyCVR视频调阅和设备录像回看无法自动播放的原因排查与解决
智慧安防监控EasyCVR视频管理平台能在复杂的网络环境中,将前端设备统一集中接入与汇聚管理。国标GB28181协议视频监控/视频汇聚EasyCVR平台可以提供实时远程视频监控、视频录像、录像回放与存储、告警、语音对讲、云台控制、平台级联、磁盘阵列存储、视频集中存储、…...

百元不入耳蓝牙耳机哪个好?必入五款高性价比产品
喜欢听歌的朋友都会遇到一个常见问题,长时间戴耳机容易导致耳朵不适,甚至疼痛难忍。这种情况下,要是不听音乐反而感到不舒服,真是让人苦恼,仿佛音乐与耳机无法和谐共存。但是,难道就没有一款既舒适又让人心…...

android APP monkey 测试
monkey 测试 一、电脑ADB安装及使用详解1、什么是 Monkey 测试2、什么是ADB3、ADB的作用4、安装前提条件5、ADB下载6、ADB安装与配置 二、连接安卓手机检查是否连接上安卓手机windows端安装ADB驱动 三、 monkey测试操作指令演示指令APP包名查看方式测试效果 一、电脑ADB安装及使…...

IMBoy缓存系统深度解析:为何选择depcache而非ETS或Redis
在IMBoy即时通讯平台的开发过程中,我们面临了选择最佳缓存系统的关键技术决策。经过细致的考量,我们选择了depcache作为IMBoy的核心缓存机制。本文将阐述IMBoy缓存系统的选型理由,并对比分析depcache与纯ETS方案及Redis方案的不同优势。 1. …...

Twitter Api查询用户粉丝列表
如果大家为了获取实现方式代码的话可能要让大家失望了,这边文章主要是为了节省大家开发时间,少点坑。https://api.twitter.com/2/users/:id/followers ,这个接口很熟悉吧,他是推特提供的获取用户关注者(粉丝࿰…...
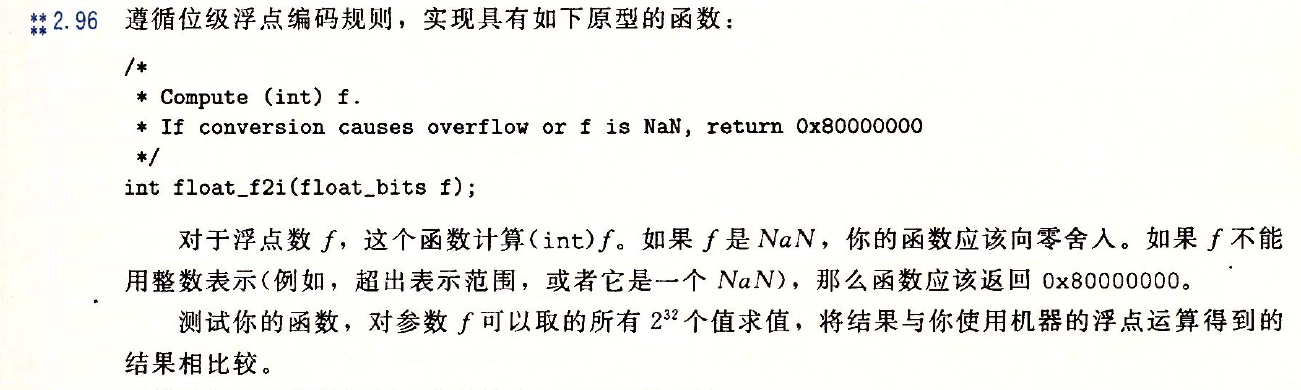
深入理解计算机系统 家庭作业 2.96
题目出的很不好,感觉没有标准. #include <stdio.h>typedef unsigned float_bits;int float_f2i(float_bits f) {unsigned sign f >> (31);unsigned exp (f >> 23) & 0xff;unsigned frac f & 0x7fffff;unsigned add (frac & 0x3) 0x3;unsig…...

主函数if __name__ == ‘__main__‘:
在Python中,主函数通常指的是脚本的入口点,也就是当你直接运行一个Python脚本时,会首先执行的函数。在大多数Python脚本中,主函数并不是通过main()这样的函数名来定义的,而是通过检查脚本是作为模块导入还是被直接运行…...
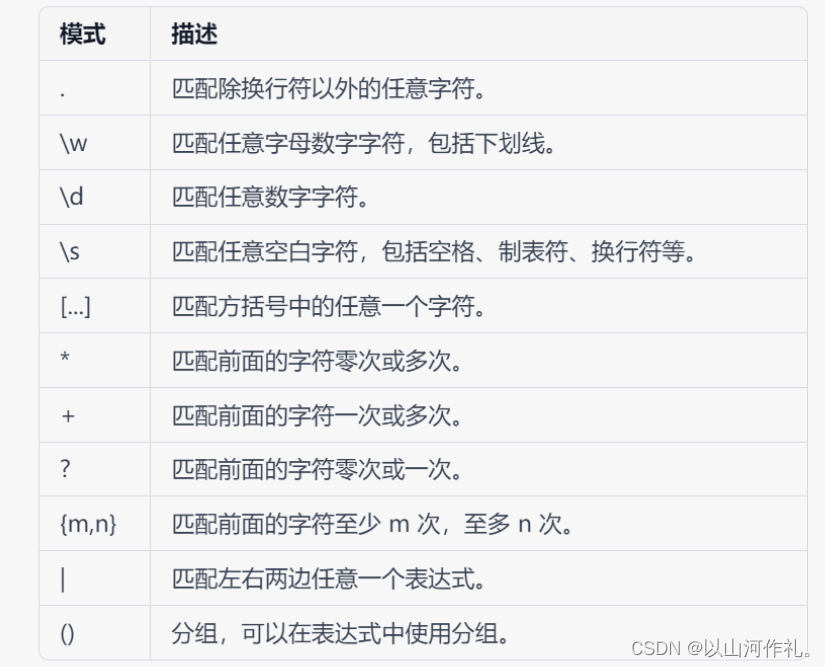
34.Python从入门到精通—Python3 正则表达式检索和替换
34.从入门到精通:Python3 正则表达式检索和替换 repl 参数是一个函数 正则表达式对象 正则表达式修饰符 - 可选标志 正则表达式模式* 正则表达式实例 检索和替换repl 参数是一个函数正则表达式对象正则表达式修饰符 - 可选标志正则表达式模式*正则表达式实例 检索和…...

springboot 反射调用ServiceImpl时报错:java.lang.NullPointerExceptio、,mapper为null【解决方法】
springboot 反射调用ServiceImpl时报错:java.lang.NullPointerException、mapper为null【解决方法】 问题描述问题分析解决方案创建SpringBootBeanUtil编写调用方法 executeMethod调用 总结 问题描述 在使用Spring Boot时,我们希望能够通过反射动态调用…...

内网安全之域内密码喷洒
域内密码喷洒一般和域内用户名枚举一起使用,可以在无域内凭据的情况下,通过枚举出域内存在的用户名,进而对域内存在的用户名进行密码喷洒,以此来获得域内有效凭据。 在Kerberos协议认证的AS-REQ阶段,请求包cname对应的…...

网格隐藏技术在ANSYS仿真分析中的应用研究
网格隐藏 ansys仿真分析在ANSYS仿真分析里折腾过复杂模型的朋友,肯定都有过被满屏网格线晃瞎眼的经历。鼠标滚轮放大缩小两下,零件结构没看清,倒是先被密密麻麻的网格线整得晕头转向。这时候要是会玩"网格隐身术",工作…...

DNS解析 HTTP TCP/IP ICMP/NAT/NAPT相关知识点
DNS解析 HTTP TCP/IP ICMP/NAT/NAPT 文章目录DNS解析 HTTP TCP/IP ICMP/NAT/NAPT📌 一、DNS相关面试题答案1. DNS解析过程是怎样的?2. DNS使用的是TCP还是UDP?为什么?3. 什么是DNS缓存污染?如何防止?4. DNS…...
)
华为OD机考双机位C卷 - 挑选字符串 (Java)
挑选字符串 2026华为OD机试双机位C卷 - 华为OD上机考试双机位C卷 华为OD机试双机位C卷真题目录(Java)点击查看: 【全网首发】2026华为OD机位C卷 机考真题题库含考点说明以及在线OJ(Java题解) 题目描述 给定 [a-z],26个英文字母小写字符串组成的字符串 A 和 B,其中 A 可…...

二分查找看这篇就够了!Java 版超详细讲解+高频题解
二分查找看这篇就够了!Java 版超详细讲解高频题解 大家好,今天我们来彻底吃透二分查找。作为算法面试、笔试中的“常青树”,它是必考且基础的核心知识点,看似只有“左右指针中间值对比”这一个简单逻辑,但实际应用中&a…...

Qwen3-ASR-1.7B模型微调:基于特定领域数据的优化方法
Qwen3-ASR-1.7B模型微调:基于特定领域数据的优化方法 语音识别模型在通用场景下表现不错,但一到专业领域就频频出错?试试用你自己的数据给它来个专项培训 1. 先了解微调到底能帮你解决什么问题 你可能已经用过Qwen3-ASR-1.7B这个语音识别模型…...

VideoAgentTrek-ScreenFilter一文详解:class_id与class_name映射关系说明
VideoAgentTrek-ScreenFilter一文详解:class_id与class_name映射关系说明 在视频和图像分析领域,目标检测模型的核心输出之一就是识别出画面中的物体并对其进行分类。对于开发者而言,理解模型输出的类别标识(class_id)…...

4大维度解析SENAITE LIMS:开源实验室管理系统的技术优势与实践指南
4大维度解析SENAITE LIMS:开源实验室管理系统的技术优势与实践指南 【免费下载链接】senaite.lims SENAITE Meta Package 项目地址: https://gitcode.com/gh_mirrors/se/senaite.lims SENAITE LIMS是一款基于Python技术栈构建的开源实验室信息管理系统&#…...

文墨共鸣大模型快速开发:.NET后端集成与API封装
文墨共鸣大模型快速开发:.NET后端集成与API封装 最近在做一个需要集成大语言模型的项目,后端用的是.NET技术栈。市面上很多教程都是Python的,对.NET开发者不太友好。其实用ASP.NET Core来封装大模型调用,既简单又高效,…...
——平稳性检验实战指南)
时间序列分析(二)——平稳性检验实战指南
1. 为什么需要平稳性检验? 当你第一次接触时间序列分析时,可能会疑惑:为什么我们要大费周章地检验数据的平稳性?这个问题困扰了我很久,直到在实际项目中踩过几次坑才真正理解。想象一下,你正在用ARIMA模型…...

Z-Image-Turbo-辉夜巫女企业级应用:低成本AI绘画方案助力IP视觉延展
Z-Image-Turbo-辉夜巫女企业级应用:低成本AI绘画方案助力IP视觉延展 1. 项目概述 Z-Image-Turbo-辉夜巫女是一款基于Xinference部署的文生图模型服务,专门用于生成具有辉夜巫女风格的图像。该模型采用Lora技术对基础模型进行微调,能够快速生…...