基于51单片机的步进电机调速系统设计
基于51单片机的步进电机调速系统
(仿真+程序+原理图+设计报告)
功能介绍
具体功能:
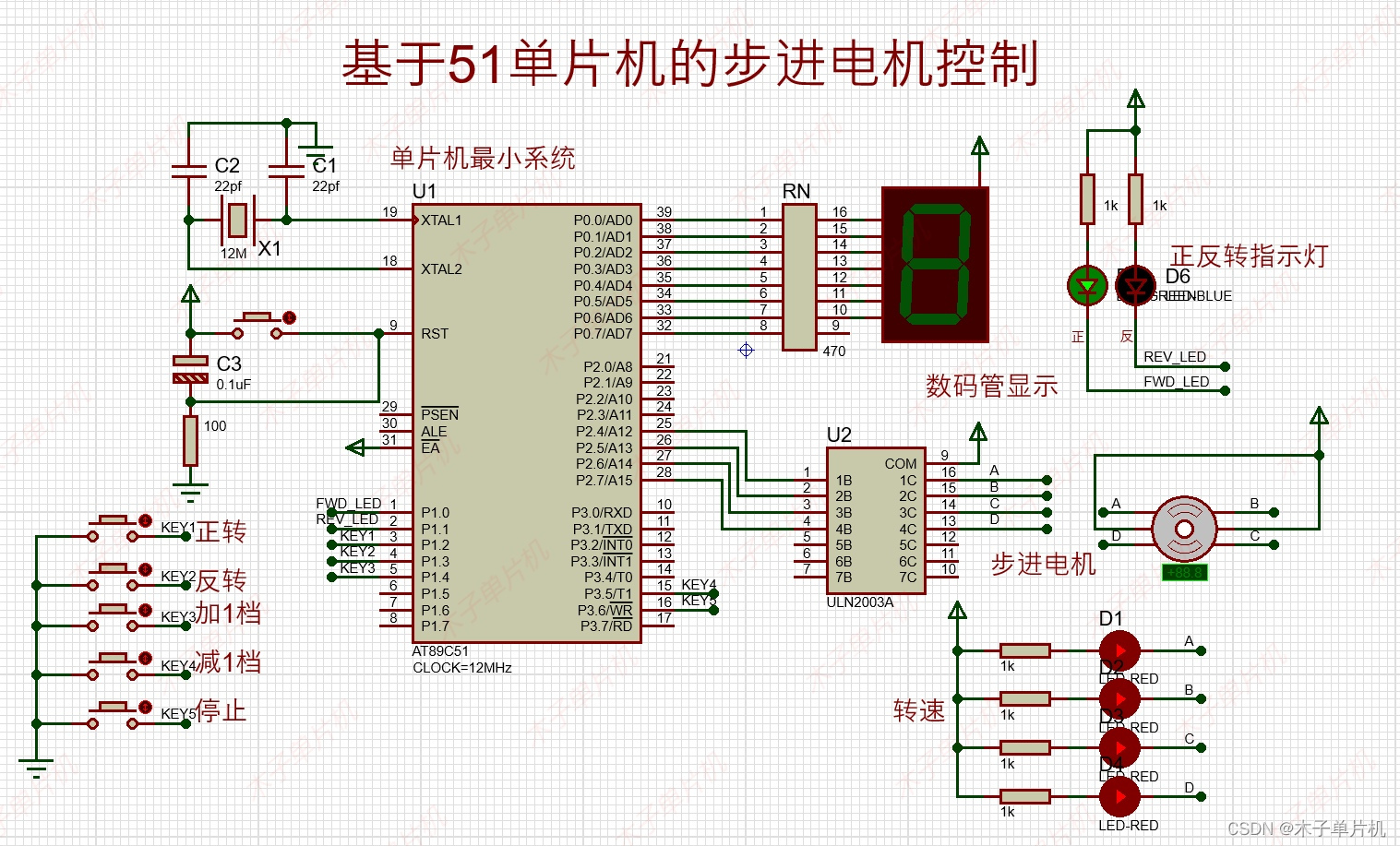
1.按键可以控制电机正、反转,加、减速,停止;
2.一位7段数码管实时显示档位(共9档);
3.两个LED分别来表示正转、反转;
4.四个LED流水闪烁来表示电机转速;
演示视频:
基于51单片机的步进电机调速系统设计

#include "reg52.h"
/*
按键控制步进电机:正转、反转、加1档、减1档、停止
数码管显示步进电机档位,总共有9档
LED灯显示正转、反转、转速
*//*宏定义*/
#define SpeedShow P0 //数码管显示接口
#define MotorDriver P2 //步进电机驱动接口typedef unsigned char uchar; // 8位有符号整数
typedef unsigned int uint; //16位有符号整数
typedef unsigned long ulong; //32位有符号整数#define KEY_TIME_SHORT 20 //短按的按键去抖动延时的时间
//---加入全局变量--//
extern uchar KeyCode;
extern uint KeyTimeCnt[5]; //按键去抖动延时计数器,分别对应KEY1/2/3/4/5
extern uchar KeyLock[5]; //按键触发后自锁的变量标志,分别对应KEY1/2/3/4/5//-----------------------------------------------------------------
// 相关函数声明
//-----------------------------------------------------------------
void KeyScan(); //按键扫描函数 放在定时中断里
void Delay10ms(); //延时函数//0~9 的共阳数码管段码,最后一个是黑屏
const uchar SEG_CODE[] = {0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,0xFF};//输出励磁序列的频率参数{TH1,TL1}
const uchar Timer[9][2]={{0xDE,0xE4},{0xE1,0xEC},{0xE5,0xD4},{0xE9,0xBC}, //8.476 ~ 1ms{0xEd,0xA4},{0xF1,0x8C},{0xF5,0x74},{0xF9,0x5C},{0xFC,0x18}};//步进电机正转的励磁序列
const uchar FFW[] = {0x1F,0x3F,0x2F,0x6F,0x4F,0xCF,0x8F,0x9F}; //DCBAXXXX//步进电机反转的励磁序列
const uchar REV[] = {0x9F,0x8F,0xCF,0x4F,0x6F,0x2F,0x3F,0x1F}; //DCBAXXXX//枚举变量--正反转标志
typedef enum{FwdRun, RevRun} RunFlag;
RunFlag flag1 = FwdRun;uchar speed = 0;uchar KeyCode = 0; //按键编码值//共5个独立机械按键,通过短按实现5种按键编码值
uint KeyTimeCnt[5] = {0,0,0,0,0}; //按键去抖动延时计数器,分别对应KEY1/2/3/4/5
uchar KeyLock[5] = {0,0,0,0,0}; //按键触发后自锁的变量标志,分别对应KEY1/2/3/4/5/* IO引脚分配*/
sbit KEY1 = P1^2; //按键1
sbit KEY2 = P1^3; //按键2
sbit KEY3 = P1^4; //按键3
sbit KEY4 = P3^5; //按键4
sbit KEY5 = P3^6; //按键5sbit FWD_LED = P1^0; //正转指示灯
sbit REV_LED = P1^1; //反转指示灯//函数声明
void T0_Init(); //定时器0初始化函数声明
void T1_Init(); //定时器1初始化函数声明
void KeyService(); //按键服务函数声明
void delay_ms(uint t); //毫秒延时函数声明//-----------------------------------------------------------------
// 主程序
//-----------------------------------------------------------------
void main()
{ T0_Init(); //定时器0初始化T1_Init(); //定时器1初始化FWD_LED = 0; //正转指示灯亮,默认初始化是正转delay_ms(500); //延时500ms,待各个模块上电稳定EA = 1; //开启中断while(1){ KeyService(); //按键服务程序}
} //-----------------------------------------------------------------
// Timer0 初始化,模式1,允许中断,1ms定时
// Timer0 用于按键扫描
//-----------------------------------------------------------------
void T0_Init()
{TMOD &= 0xF0;TMOD |= 0x01; //T0工作于模式1,16位定时器TH0 = (65536 - 1000) >> 8; //1ms定时TL0 = (65536 - 1000) & 0xFF;ET0 = 1; //允许T0中断TR0 = 1; //启动T0
}//-----------------------------------------------------------------
// Timer1 初始化,模式1,允许中断
// Timer1 用于改变步进电机转速
//-----------------------------------------------------------------
void T1_Init()
{TMOD &= 0x0F;TMOD |= 0x10; //定时器1工作于模式1,16位定时器TH1 = Timer[speed][0];TL1 = Timer[speed][1]; //定时器1,定时用于步进电机转速控制ET1 = 1; //允许T1中断PT1 = 1; //定时器1优先级高TR1 = 0; //关闭定时器1
}//-----------------------------------------------------------------
// Timer0 中断服务程序
//-----------------------------------------------------------------
void InterruptTime0() interrupt 1
{TH0 = (65536 - 1000) >> 8; //1msTL0 = (65536 - 1000) & 0xFF;KeyScan(); //按键扫描
}//-----------------------------------------------------------------
// Timer1 中断服务程序
//-----------------------------------------------------------------
void InterruptTime1() interrupt 3
{static step1 = 0; static step2 = 0;TH1 = Timer[speed - 1][0]; //根据不同的转速档位,给定时器1赋定时器值TL1 = Timer[speed - 1][1]; //按照定时器1的频率循环发送正转励磁序列的脉冲给步进电机,使其不停地转动if(flag1 == FwdRun)//正转{MotorDriver = FFW[step1++]; if(step1 == 8) step1 = 0; }//按照定时器1的频率循环发送反转励磁序列的脉冲给步进电机,使其不停地转动else if(flag1 == RevRun) {MotorDriver = REV[step2++];if(step2 == 8) step2 = 0; }
}//-----------------------------------------------------------------
// 按键服务程序
//-----------------------------------------------------------------
void KeyService()
{switch (KeyCode){case 1: flag1 = FwdRun; //正转FWD_LED = 0; REV_LED = 1; //正转指示灯亮KeyCode = 0;break; case 2: flag1 = RevRun; //反转FWD_LED = 1; REV_LED = 0; //反转指示灯亮KeyCode = 0;break;case 3: speed++; //速度加if(speed == 10) speed = 1; SpeedShow = SEG_CODE[speed];if(TR1 == 0) TR1 = 1;KeyCode = 0;break;case 4: speed--; //速度减if(speed == 0 || speed == -1 ) speed = 9;SpeedShow = SEG_CODE[speed]; if(TR1 == 0) TR1 = 1; KeyCode = 0;break;case 5: TR1 = 0; //停止SpeedShow = 0xFF;MotorDriver = 0x00;KeyCode = 0;break; default: ;}
}硬件设计
使用元器件:
单片机:STC89C52;
(注意:单片机是通用的,无论51还是52、无论stc还是at都一样,引脚功能都一样。程序也是一样的。)
万用板9*15;DC电源插口;
自锁开关;2.2K电阻*7;
40脚IC座;钮扣电池;
电池座;10uF电容;
ULN2003驱动芯片;
1位7段LED数码管;
10K排阻(103);
10K电阻*1;按键*6;
30Pf瓷片电容*2;
DC-5V步进电机;
12M晶振;导线:若干;
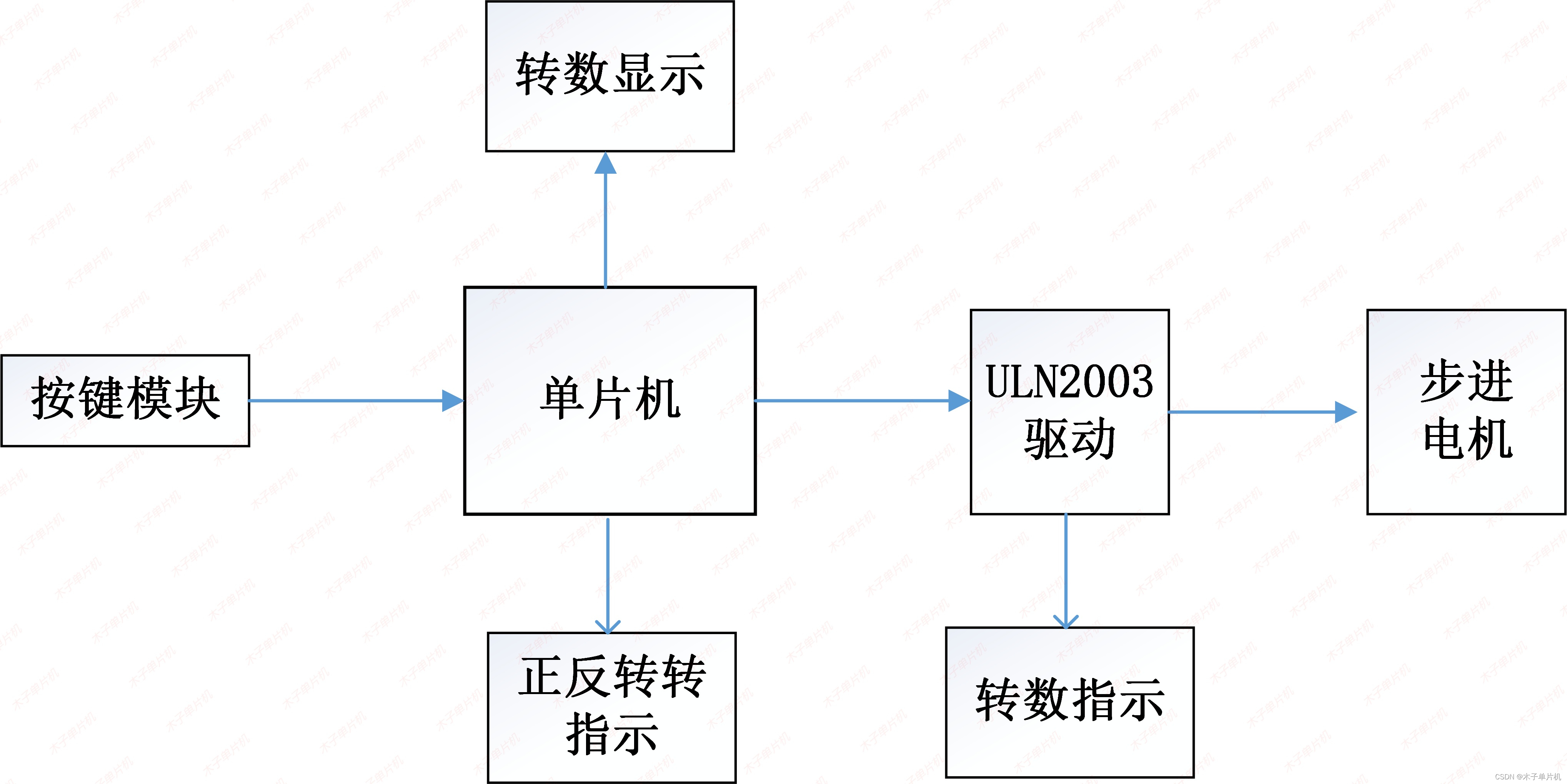
结构图:
设计资料
01 仿真图
本设计使用proteus8.9版本设计,资料里有安装教程,无需担心!具体如图!

02 原理图
本系统原理图采用Altium Designer19设计,具体如图!

03 程序
本设计使用软件keil5版本编程设计,资料里有安装教程,无需担心!具体如图!

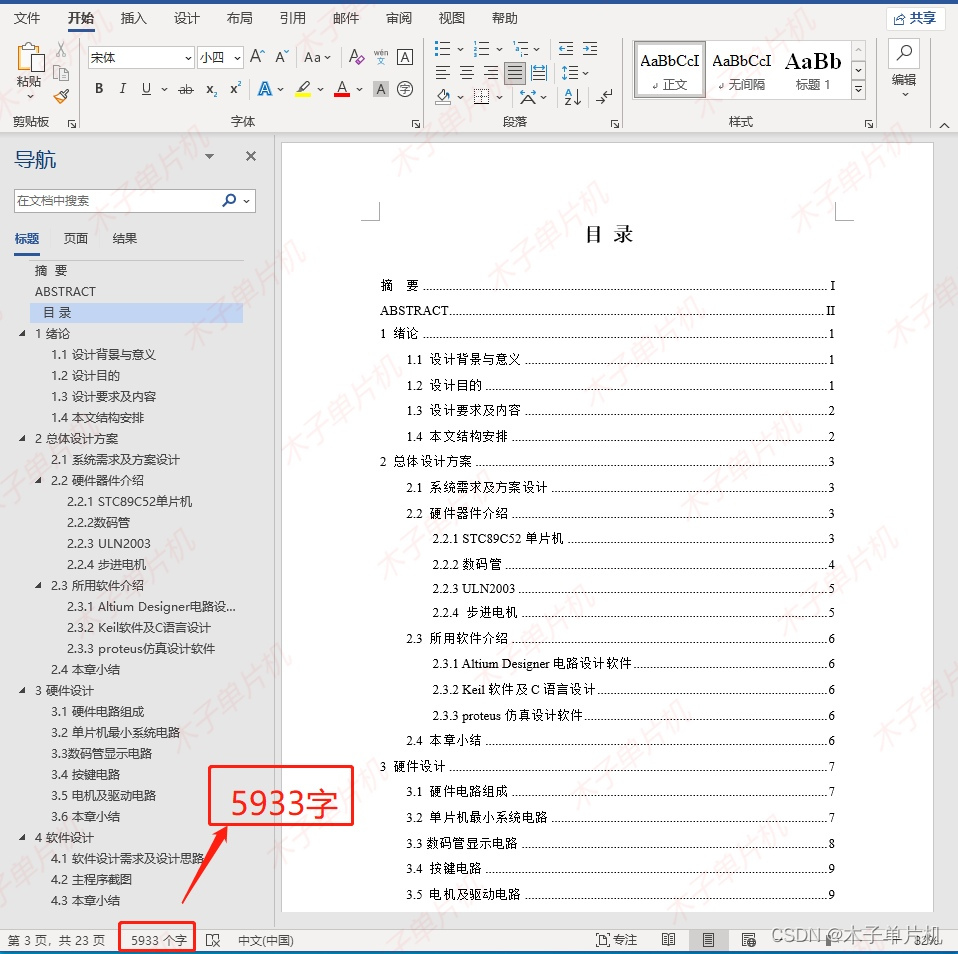
04 设计报告
五千字设计报告,具体如下!
05 设计资料
资料获取请关注同名公众号,全部资料包括仿真源文件 、程序(含注释)、AD原理图、参考论文、实物图、流程图、任务书、元件清单、讲解视频等。具体内容如下,全网最全! !
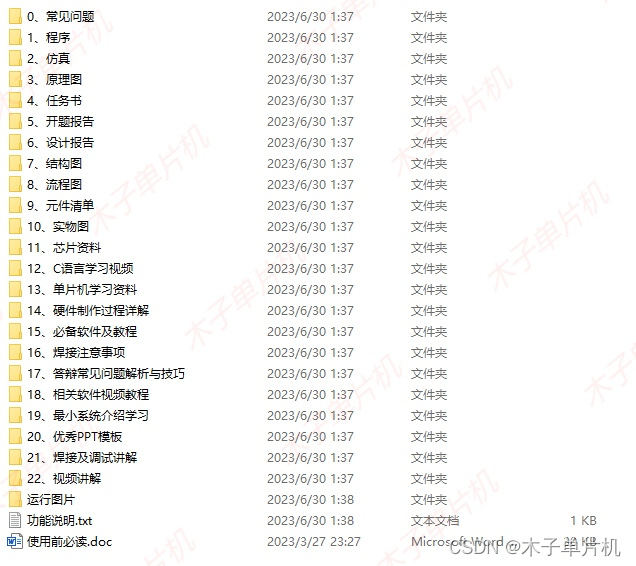
资料获取请观看前面演示视频!
点赞分享一起学习成长。
相关文章:
基于51单片机的步进电机调速系统设计
基于51单片机的步进电机调速系统 (仿真+程序+原理图+设计报告) 功能介绍 具体功能: 1.按键可以控制电机正、反转,加、减速,停止; 2.一位7段数码管实时显示档位…...

postcss概述
PostCSS是一个用于转换CSS的工具,它使用插件来处理CSS,并提供了一种方式来编写可扩展的CSS代码。其主要特点如下: 插件驱动:PostCSS的核心非常轻量级,大部分功能都是通过插件来实现的。这意味着用户可以根据项目的需求…...
【Proteus】51单片机对直流电机的控制
直流电机:输出或输入为直流电能的旋转电机。能实现直流电能和机械能互相转换的电机。把它作电动机运行时是直流电动机,电能转换为机械能;作发电机运行时是直流发电机,机 械能转换为电能。 直流电机的控制: 1、方向控制…...
JET毛选学习笔记:如何利用《实践论》学习实验
一、个人背景介绍 本人本科读的是预防医学专业(因为没考上临床),硕博连读(报名人少,我报了就得了)的时候专业是流行病与卫生统计学,除了学习流行病学、统计学(忘得差不多了…...

FinalShell 远程连接 Linux(Ubuntu)系统
Linux 系列教程: VMware 安装配置 Ubuntu(最新版、超详细)FinalShell 远程连接 Linux(Ubuntu)系统Ubuntu 系统安装 VS Code 并配置 C 环境 ➡️➡️➡️提出一个问题:为什么使用 FinalShell 连接࿰…...
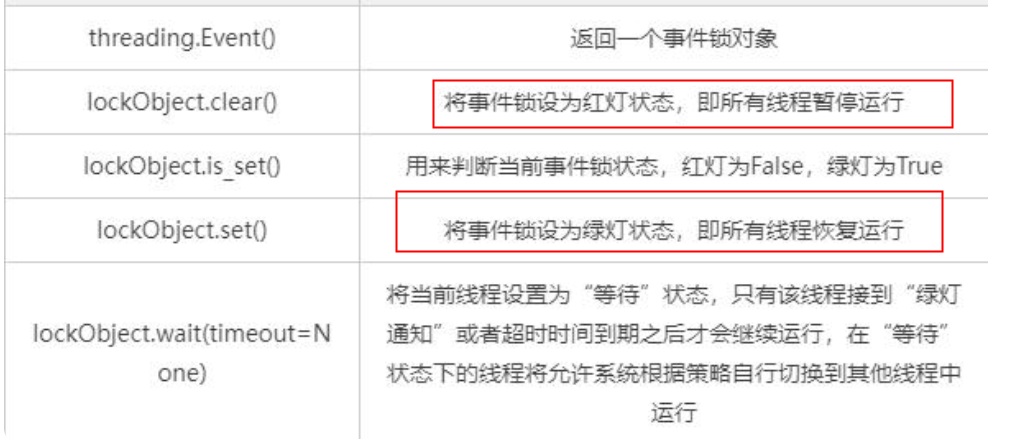
Python零基础从小白打怪升级中~~~~~~~多线程
线程安全和锁 一、全局解释器锁 首先需要明确的一点是GIL并不是Python的特性,它是在实现Python解析器(CPython)时所引入的一个概念。 GIL全称global interpreter lock,全局解释器锁。 每个线程在执行的时候都需要先获取GIL,保证同一时刻只…...
【机器学习300问】67、均方误差与交叉熵误差,两种损失函数的区别?
一、均方误差(Mean Squared Error, MSE) 假设你是一个教练,在指导学生射箭。每次射箭后,你可以测量子弹的落点距离靶心的差距(误差)。MSE就像是计算所以射击误差的平方后的平均值。它强调了每一次偏离靶心的…...
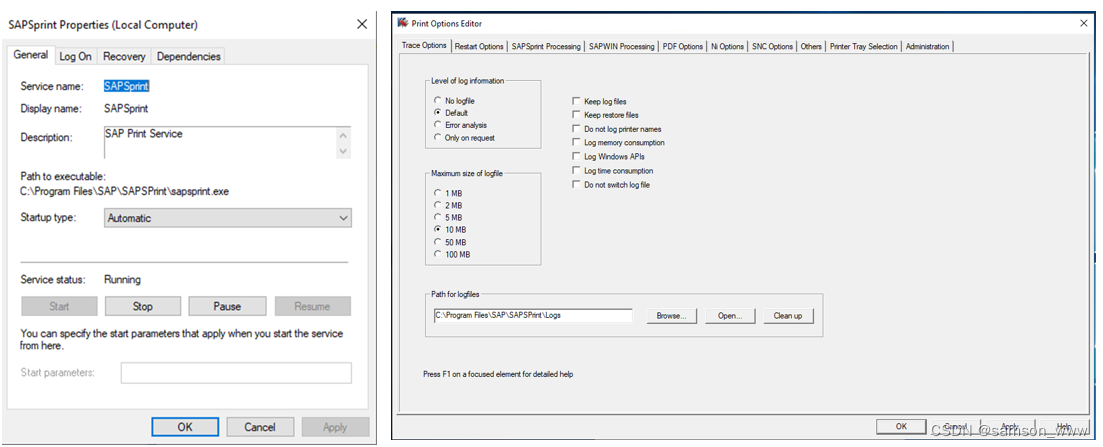
SAP打印输出设置
SAP打印输入有很多方式,适合不同的应用场景。 一.打印输出总体概览图 二.前台打印 这个是比较常见的,前端打印的出现减轻了管理员的工作量,用户可以选择自己电脑上的打印机输出,不需要所有打印机都在SAP平台中进行配置࿰…...

qt对json文件下,qdatetime时间的正确读写方式
qt 对json文件下qdatetime时间的正确读写方式 被搞了很长时间,最后发现是需要控制格式。 正确方式 // read QByteArray localBytes mapJson["playTime"].toString().toLocal8Bit(); char* char_time localBytes.data(); std::string str_time char_…...

【系统分析师】计算机网络
文章目录 1、TCP/IP协议族1.1 DHCP协议1.2 DNS协议1.3网络故障诊断 2、网路规划与设计2.1逻辑网络设计2.2物理网络设计2.3 分层设计 3、网络接入3.1 接入方式3.2 IPv6地址 4、综合布线技术5、物联网5.1物联网概念与分层5.2 物联网关键技术 6、云计算7、网络存储技术(…...
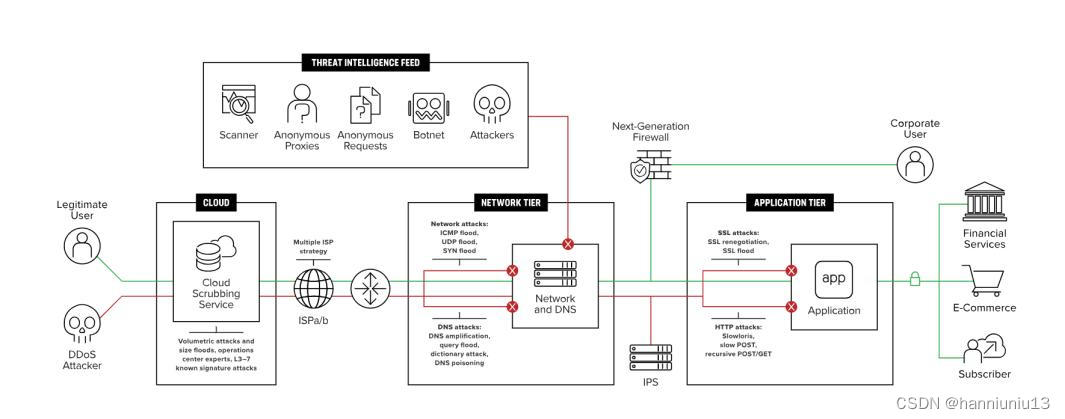
DDoS攻击愈演愈烈,谈如何做好DDoS防御
DDoS攻击是目前最常见的网络攻击方式之一,各种规模的企业包括组织机构都在受其影响。对于未受保护的企业来讲,每次DDoS攻击的平均成本为20万美元。可见,我们显然需要开展更多的DDoS防御工作。除考虑如何规避已发生的攻击外,更重要…...
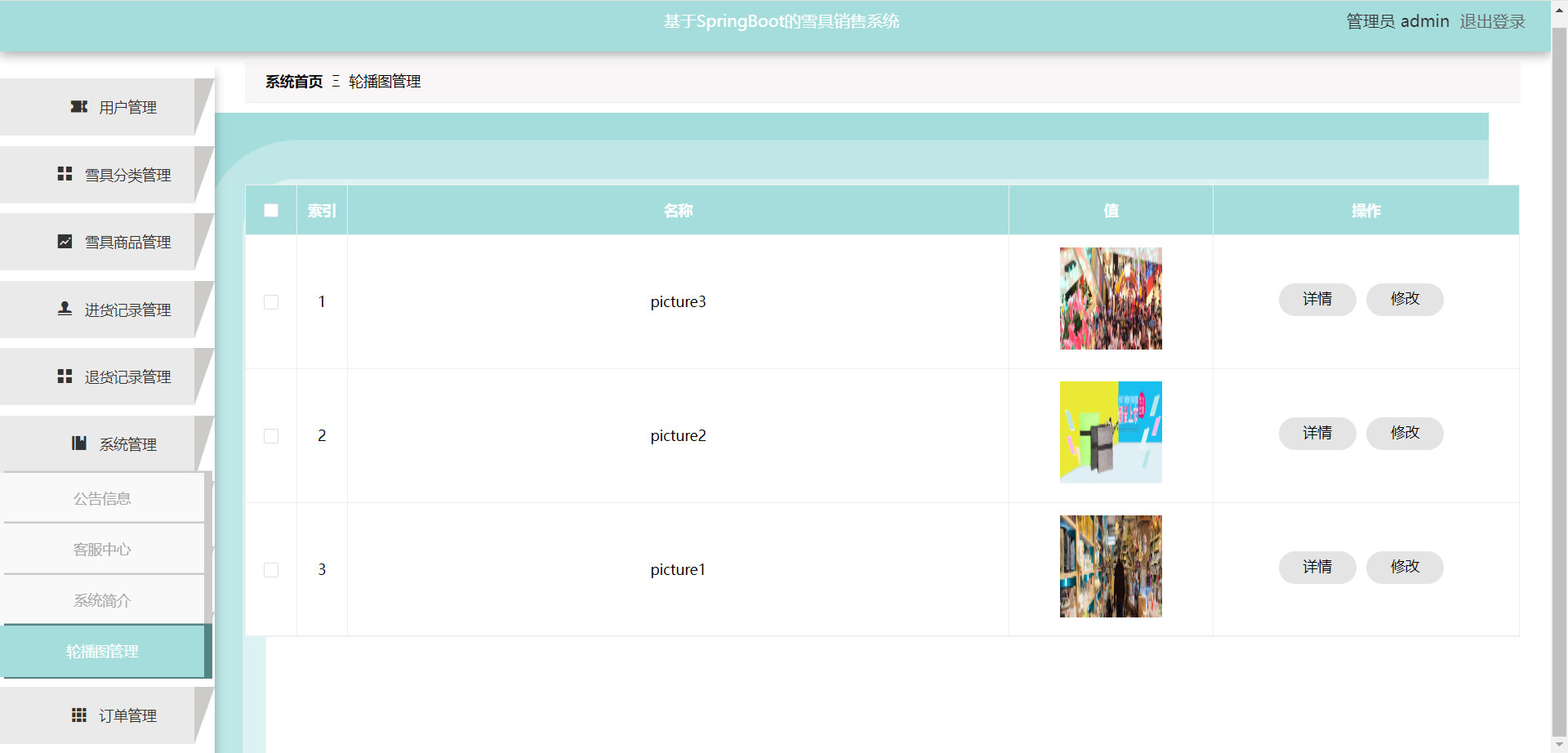
48.基于SpringBoot + Vue实现的前后端分离-雪具销售系统(项目 + 论文PPT)
项目介绍 本站是一个B/S模式系统,采用SpringBoot Vue框架,MYSQL数据库设计开发,充分保证系统的稳定性。系统具有界面清晰、操作简单,功能齐全的特点,使得基于SpringBoot Vue技术的雪具销售系统设计与实现管理工作系统…...
)
P8715 [蓝桥杯 2020 省 AB2] 子串分值 (双边检测)
# [蓝桥杯 2020 省 AB2] 子串分值 ## 题目描述 对于一个字符串 $S$, 我们定义 $S$ 的分值 $f(S)$ 为 $S$ 中恰好出现一次的字符个数。例如 $f\left({ }^{\prime \prime} \mathrm{aba}{ }^{\prime \prime}\right)1$,$f\left({ }^{\prime \prime} \mathrm{abc}{ }^{…...
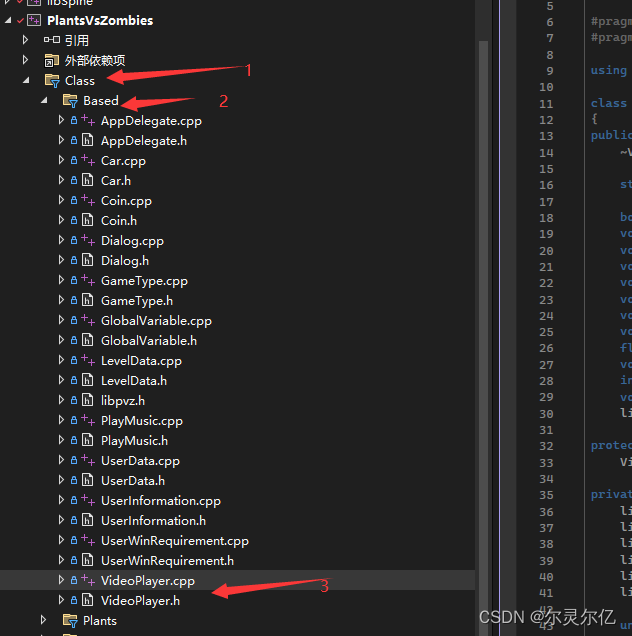
(十四)C++自制植物大战僵尸游戏windows平台视频播放实现
植物大战僵尸游戏开发教程专栏地址http://t.csdnimg.cn/8UFMs VLC库 在Cocos2d-x游戏开发框架中,没有实现windows平台视频播放的功能,需要自定义实现。在本项目中使用vlc库实现windows平台的视频播放功能。 vlc官网:网址 下载完成后&#x…...

深入理解GCC/G++在CentOS上的应用
文章目录 深入理解GCC/G在CentOS上的应用编译C和C源文件C语言编译C语言编译 编译过程的详解预处理编译汇编链接 链接动态库和静态库静态库和动态库安装静态库 结论 深入理解GCC/G在CentOS上的应用 在前文的基础上,我们已经了解了CentOS的基本特性和如何在其上安装及…...
】)
C语言【复合类型(自定义类型)】
一、结构体 结构体(struct)可以理解为用户自定义的特殊的复合的“数据类型”; 1. 结构体变量的定义和初始化 定义结构体变量的方式: 先声明结构体类型再定义变量名 在声明类型的同时定义变量 // 结构体类型的定义 struct stu {char name[50];int age;…...

【python】初识爬虫
Python爬虫介绍 目录 一、概述二、Python爬虫的基本构成爬虫引擎解析器数据存储三、Python爬虫的主要技术请求与响应URL管理页面解析数据存储四、Python爬虫的应用场景数据采集搜索引擎竞品分析价格监控五、Python爬虫的开发流程六、常用的库...
提高小红书底层逻辑认知+短视频思路打爆笔记+纯带货笔记起号(8节课)
课程内容: 小红书如何0押金开通店铺 .mp4 店铺基础搭建.mp4 小红营的流量从哪里来? 如何用养号发现优质的对标笔记?养号的真正意义是什么?.mp4 什么叫垂类标签? 账号如何打上正确的标签 .mp4 前期笔记是否挂车?不同类型的笔记审核标准是什么?.mp4 如何用…...

力扣:219. 存在重复元素 II
力扣:219. 存在重复元素 II 给你一个整数数组 nums 和一个整数 k ,判断数组中是否存在两个 不同的索引 i 和 j ,满足 nums[i] nums[j] 且 abs(i - j) < k 。如果存在,返回 true ;否则,返回 false 。 …...

程序安装 - 笔记
1 程序IOServer,依赖自己开发libs7.so.如何安装程序 要安装依赖于自己开发的 libs7.so 的程序 IOServer,你需要执行以下步骤: 编译 IOServer 程序:确保 IOServer 程序的源代码处于可用状态,并且已经编译成可执行文件。这可能需要执行诸如 make 或者其他编译命令,具体取决…...

XCTF-web-easyupload
试了试php,php7,pht,phtml等,都没有用 尝试.user.ini 抓包修改将.user.ini修改为jpg图片 在上传一个123.jpg 用蚁剑连接,得到flag...

MySQL 隔离级别:脏读、幻读及不可重复读的原理与示例
一、MySQL 隔离级别 MySQL 提供了四种隔离级别,用于控制事务之间的并发访问以及数据的可见性,不同隔离级别对脏读、幻读、不可重复读这几种并发数据问题有着不同的处理方式,具体如下: 隔离级别脏读不可重复读幻读性能特点及锁机制读未提交(READ UNCOMMITTED)允许出现允许…...

Qt Widget类解析与代码注释
#include "widget.h" #include "ui_widget.h"Widget::Widget(QWidget *parent): QWidget(parent), ui(new Ui::Widget) {ui->setupUi(this); }Widget::~Widget() {delete ui; }//解释这串代码,写上注释 当然可以!这段代码是 Qt …...

对WWDC 2025 Keynote 内容的预测
借助我们以往对苹果公司发展路径的深入研究经验,以及大语言模型的分析能力,我们系统梳理了多年来苹果 WWDC 主题演讲的规律。在 WWDC 2025 即将揭幕之际,我们让 ChatGPT 对今年的 Keynote 内容进行了一个初步预测,聊作存档。等到明…...

Frozen-Flask :将 Flask 应用“冻结”为静态文件
Frozen-Flask 是一个用于将 Flask 应用“冻结”为静态文件的 Python 扩展。它的核心用途是:将一个 Flask Web 应用生成成纯静态 HTML 文件,从而可以部署到静态网站托管服务上,如 GitHub Pages、Netlify 或任何支持静态文件的网站服务器。 &am…...
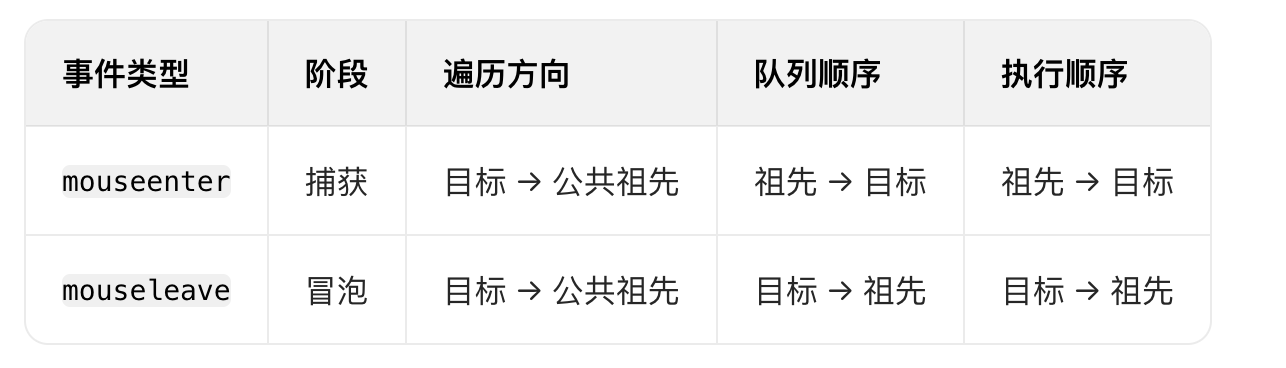
React19源码系列之 事件插件系统
事件类别 事件类型 定义 文档 Event Event 接口表示在 EventTarget 上出现的事件。 Event - Web API | MDN UIEvent UIEvent 接口表示简单的用户界面事件。 UIEvent - Web API | MDN KeyboardEvent KeyboardEvent 对象描述了用户与键盘的交互。 KeyboardEvent - Web…...
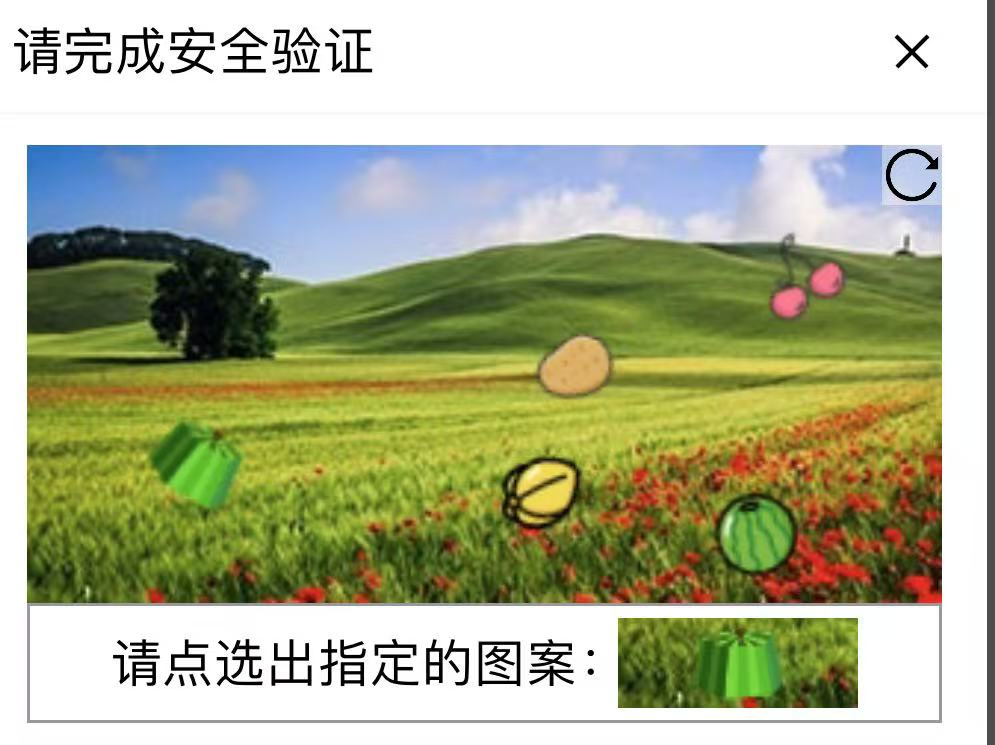
【配置 YOLOX 用于按目录分类的图片数据集】
现在的图标点选越来越多,如何一步解决,采用 YOLOX 目标检测模式则可以轻松解决 要在 YOLOX 中使用按目录分类的图片数据集(每个目录代表一个类别,目录下是该类别的所有图片),你需要进行以下配置步骤&#x…...

AI书签管理工具开发全记录(十九):嵌入资源处理
1.前言 📝 在上一篇文章中,我们完成了书签的导入导出功能。本篇文章我们研究如何处理嵌入资源,方便后续将资源打包到一个可执行文件中。 2.embed介绍 🎯 Go 1.16 引入了革命性的 embed 包,彻底改变了静态资源管理的…...
佰力博科技与您探讨热释电测量的几种方法
热释电的测量主要涉及热释电系数的测定,这是表征热释电材料性能的重要参数。热释电系数的测量方法主要包括静态法、动态法和积分电荷法。其中,积分电荷法最为常用,其原理是通过测量在电容器上积累的热释电电荷,从而确定热释电系数…...

智能AI电话机器人系统的识别能力现状与发展水平
一、引言 随着人工智能技术的飞速发展,AI电话机器人系统已经从简单的自动应答工具演变为具备复杂交互能力的智能助手。这类系统结合了语音识别、自然语言处理、情感计算和机器学习等多项前沿技术,在客户服务、营销推广、信息查询等领域发挥着越来越重要…...