RTPS协议之Behavior Module
目录
- 交互要求
- 基本要求
- RTPS Writer 行为
- RTPS Reader行为
- RTPS协议的实现
- 与Reader匹配的Writer的行为
- 涉及到的类型
- RTPS Writer实现
- RTPS Writer
- RTPS StatelessWriter
- RTPS ReaderLocator
- RTPS StatefulWriter
- RTPS ReaderProxy
- RTPS ChangeForReader
- RTPS StatelessWriter Behavior
- Best-Effort StatelessWriter Behavior
- Reliable StatelessWriter Behavior
- RTPS StatefulWriter Behavior
- Best-Effort StatefulWriter
- Reliable StatefulWriter
- Writer Liveliness Protocol
- built-in Endpoints
- Qos
- Data Types
- 使用BuiltinParticipantMessageWriter和BuiltinParticipantMessageReader实现Writer Liveliness Protocol
- Optional Behavior
- Large Data
- 如何选择fragment的size
- 如何发送片段
- 如何重组分片
- Reliable通信
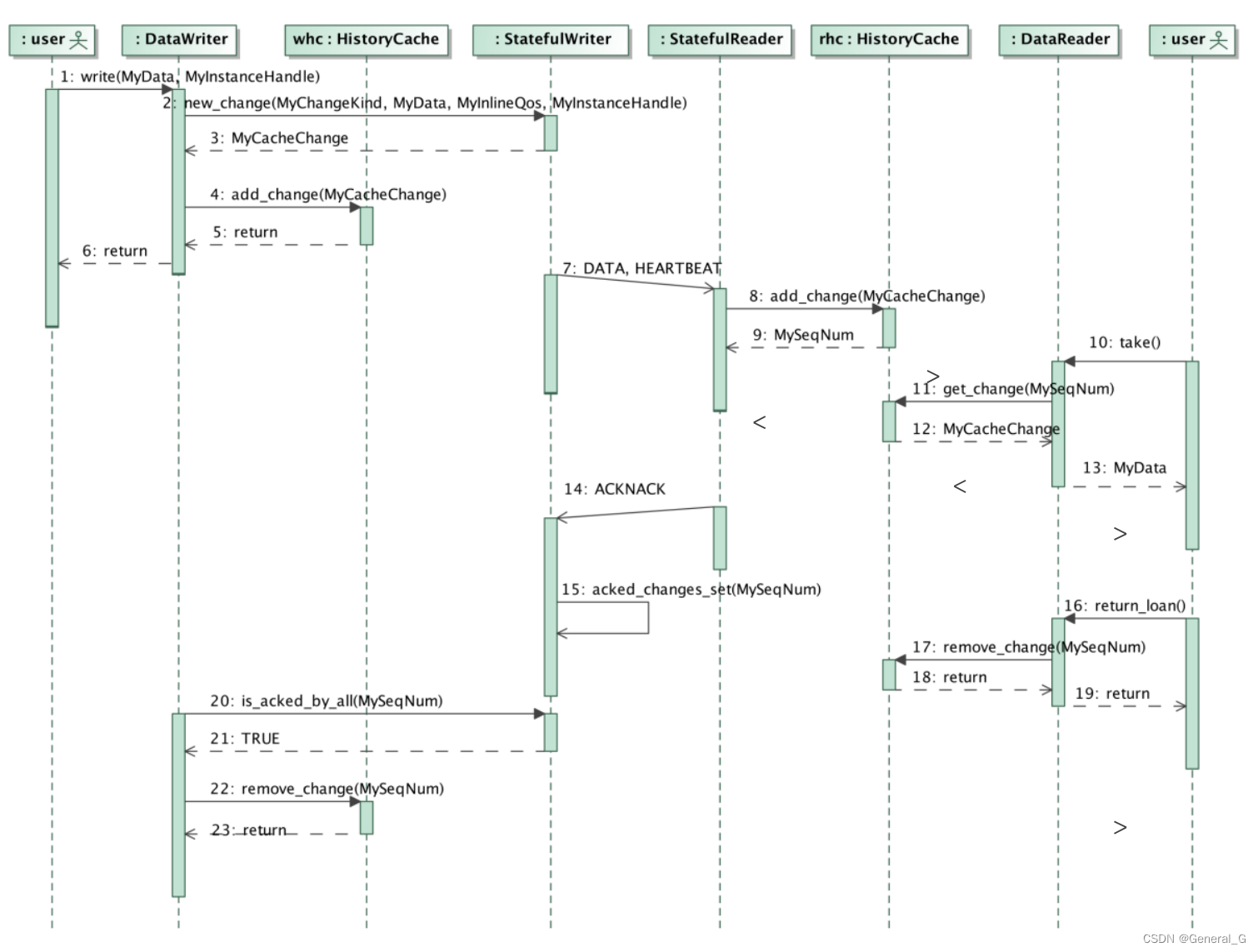
主要描述rtps实体的动态行为,主要记录rtps writer和rtps reader之间的有效的序列消息交换,和这些消息交换的时间限制。RTPS Writer和RTPS Reader的时序交互如下:
说明:
- DDS DataWriter使用writer发送数据
- DataWriter调用RTPS Writer的new_change创建一个新的CacheChange,每个CacheChange使用SequenceNumber唯一标识;
- new_change返回;
- DDS的DataWriter操作使用add_change操作将CacheChange添加到RTPS的Writer的HistoryCache中;
- add_change操作返回
- writer操作返回,用户完成写数据
- RTPS writer使用Data Submessage发送CacheChange的内容给RTPS reader,并通过同时发送一个Heartbeat的Submessage的ack请求;
- RTPS reader接收到Data消息,通过add_change操作将CacheChange添加到RTPS reader的HistoryCache中;
- add_change返回,此时CacheChange对于DDS DataReader和DDS user是有效且可见的,这依赖于RTPS reader的reliabilityLevel属性;
a. 对于RELIABLE 的DDS DataReader,只有当之前的RTPS Reader’s HistoryCache的changes可见时,当前的changes可见;
b. 对于BEST_EFFORT DDS DataReader,只有没有后面的changes是可见的时候即可(i.e., if there are no changes in the RTPS Receiver’s HistoryCache with a higher sequence number) - DDS user收到通知(通过listener或者WaitSet)并通过DataReader的take函数读取数据
- DDS 的DataReader通过HistoryCache的get_change函数读取change;
- get_change操作返回CacheChange给DataReader;
- take操作返回数据给DDS user;
- RTPS Reader发送AckNack消息表示CacheChange已存放到Reader的HistoryCache中,AckNack消息中包含RTPS reader的GUID,和change的SequenceNumber。这些操作和通知DDS user或take操作是独立的(即并行的);
- StatefulWriter记录RTPS Reader已经收到CacheChange并使用acked_changes_set操作将其加入到由ReaderProxy维护的acked_changes的set中。
- DDS user在DataReader上调用return_loan操作表明不再使用前面通过take操作获取到的数据;
- DataReader使用remove_change操作从HistoryCache中删除数据;
- remove_change操作返回;
- return_loan操作返回;
- DataWriter通过is_acked_by_all查看和该StatefulWriter匹配的哪些RTPS reader的CacheChanges接收到了;
- DataWriter通过remove_change从RTPS Writer的HistoryCache中删除指定seq_num的change;这一步操作也需要考虑到DDS Qos如DURABILITY
- remove_change返回
交互要求
基本要求
- 所有的通信必须使用RTPS Messages
- 必须实现RTPS Message Receiver
RTPS Writer 行为
- writers发送数据不能out-of-order,即必须要按添加到HistoryCache中的数据发送
- 如果reader要求,Writers必须包含 in-line Qos
- Writers只有在reliable下必须周期性发送HEARTBEAT Messages。
- Writer必须通过周期性的发送HEARTBEAT message通知每个匹配的reliable readers存在有效的data sample,这个HEARTBEAT message中包含有效sample的Sequence number;如果没有有效的samples,就没有HEARTBEAT Message需要发送;
- 对于严格使用reliable通信的情况,Writer必须持续性给Readers发送HEARTBEAT Messages,直到Reader要么确认收到了所有有效的samples,要么消失
- 其他情况下,HEARTBEAT消息的发送可以是特定实现的,也可以是有限的
- 在reliable模式下(且只在该模式下),Writer必须对negative acknowledgment作出回应。当收到ACKNACK Message,表明Reader丢失了一些data sample,Writer必须要么发送丢失的data sample,发送一个GAP message当sample是无关的时候;要么当sample不再有效时发送一个HEARTBEAT message;Writer可以立即回应,或者选择未来的某个时间点发送;可以合并多个相关的response一起发送;
- 属于一个Group的Writer会发送HEARTBEAT or GAP Submessages给和他匹配的Readers,即使是Reader接收到了Writer的所有的samples。This is necessary for the Subscriber to detect the
group sequence numbers that are not available in that Writer. The exception to this rule is when the Writer has
sent DATA or DATA_FRAG Submessages that contain the same information.
RTPS Reader行为
best-effort Reader只接收数据,不会发送任何数据;所以下面描述的要求仅限于reliable Reader。
- Readers在收到一个没有设置最终flag的HEARTBEAT消息时必须作出响应。一旦收到一个未设置最终flag的HEARTBEAT消息时,Reader必须回应一个ACKNACK Message。这个ACKNACK Message消息可以用于回应收到了所有的data sample,或者一些data sample丢失了。响应可能会延迟,以避免消息风暴(在RTPS协议中,当一个节点收到一个HEARTBEAT消息时,它并不一定立即作出响应。相反,它可能会延迟一段时间后才做出响应,以防止在短时间内收到大量的HEARTBEAT消息,导致网络拥塞或过载。通过延迟响应,系统可以更有效地管理通信流量,确保通信的稳定性和可靠性)。
- Readers在收到一个HEARTBEAT消息后发现data sample丢失了的时候必须响应一个ACKNACK Message。这一要求只有在Reader的缓存可以容纳这些丢失的data sample时才适用,并且与HEARTBEAT消息中的最终标志的设置无关。换句话说,在RTPS协议中,如果接收者的缓存能够处理缺失的数据样本,并且即使在HEARTBEAT消息中未设置最终标志,接收者仍然需要按照先前提到的规则做出响应。这强调了接收者在处理数据丢失时的一致性和可靠性。
- 这个消息可以延迟,以避免消息风暴
- 当一个liveness HEARTBEAT同时设置了liveness标志和final标志时,表明这是一个仅包含liveness信息的消息,此时不需要进行响应。换句话说,在RTPS协议中,如果一个HEARTBEAT消息被设置了liveness标志和flag标志,那么接收者不需要做出响应,因为这个消息只是用来表明发送者的存活状态,而不需要接收者采取任何措施。
- 一旦一个Reader使用ACKNACK消息积极地确认接收了一个数据样本,那么它就不能在之后的时间点再次使用负面确认(NAK)消息来否定地确认相同的数据样本。
- 当一个Writer从所有Readers那里都收到了积极的确认消息(positive acknowledgement),表示所有Readers都成功接收了相应的数据样本后,Writer可以收回与该数据样本相关的任何资源。这意味着Readers可以释放内存或其他资源,因为数据已经成功传输给了所有的Readers。
- 如果一个Writer之前收到了积极的确认消息,表示某个数据样本已经成功接收,然后在之后又收到了一个负面的确认消息(negative acknowledgement),表示该样本未成功接收,但Readers仍能够处理这个请求,那么Readers应该重新发送这个数据样本。这样做是为了确保数据的完整性和可靠性,即使在之前已经收到积极确认的情况下,如果有必要,仍然应该重新发送未成功接收的数据样本。——?TODO 是否矛盾?
- Readers只能发送ACKNACK message用于回应HEARTBEAT Message。在稳定状态下,ACKNACK消息只能作为对来自Writer的HEARTBEAT消息的响应而发送。当Reader首次发现写入者时,可以发送ACKNACK消息作为一种优化。Reader不需要对这些预先发送的ACKNACK消息做出响应。
RTPS协议的实现
- Stateless实现:被优化用于可伸缩性。它在远端entities上几乎不保存任何状态,因此在大型系统中具有非常好的可伸缩性。这涉及到一种权衡,因为改进的可伸缩性和减少的内存使用可能需要额外的带宽使用。Stateless的实现非常适合通过组播进行best-effort通信。
- Stateful实现:在远端entities上维护完整状态。这种方法最小化了带宽使用,但需要更多的内存,并可能导致可伸缩性降低。与Stateless实现相比,它可以保证严格可靠的通信,并能够在写入者端应用基于QoS或基于内容的过滤。
- 实际的实现不需要完全遵守上面的规则,可以根据需要结合以上特点。Stateless Reference Implementation在远程实体上保持了最少的信息和状态。因此,它无法在写入端执行基于时间的过滤,因为这需要跟踪每个远程读取器及其属性。它也无法在读取器端丢弃无序样本,因为这需要跟踪从每个远程写入器接收到的最大序列号。一些实现可能模仿 Stateless Reference Implementation,但选择存储足够的额外状态以避免上述一些限制。所需的额外信息可以永久性地存储,这种情况下,实现接近于状态参考实现,或者可以慢慢老化并在需要时保留,以尽可能地模拟保持状态时的行为。
与Reader匹配的Writer的行为
与Reader匹配的RTPS Writer的行为,取决于RTPS Writer和RTPS Reader的reliabilityLevel属性(reliable和best-effort)的设置。
Writer和Reader允许的匹配:
- RTPS Writer的reliabilityLevel属性设置为RELIABLE
- RTPS Writer和RTPS Reader的reliabilityLevel属性都设置为BEST_EFFORT
这是因为DDS标准要求,BEST_EFFORT DDS DataWriter只能BEST_EFFORT DDS DataReader,RELIABLE DDS DataWriter可以匹配RELIABLE 和 BEST_EFFORT DDS DataReader
以上说明只限定于匹配,对于Stateful和Stateless来说,它们是可以通信的。
涉及到的类型
| Attribute type | Purpose |
|---|---|
| Duration_t | 时间 |
| ChangeForReaderStatusKind | ChangeForReader.的状态,有以下值:UNSENT, UNACKNOWLEDGED, REQUESTED, ACKNOWLEDGED, UNDERWAY |
| ChangeFromWriterStatusKind | ChangeFromWriter.的状态值,有以下:LOST, MISSING, RECEIVED, UNKNOWN |
| InstanceHandle_t | |
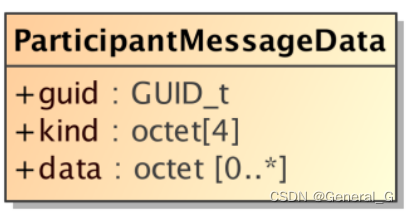
| ParticipantMessageData |
RTPS Writer实现
RTPS Writer和RTPS Reader是对RTPS Endpoint的特化实现,StatelessWriter和StatefulWriter是RTPS Reader的特化,它们的区别在于处理匹配的Reader端点的信息时,它们的方法有所不同
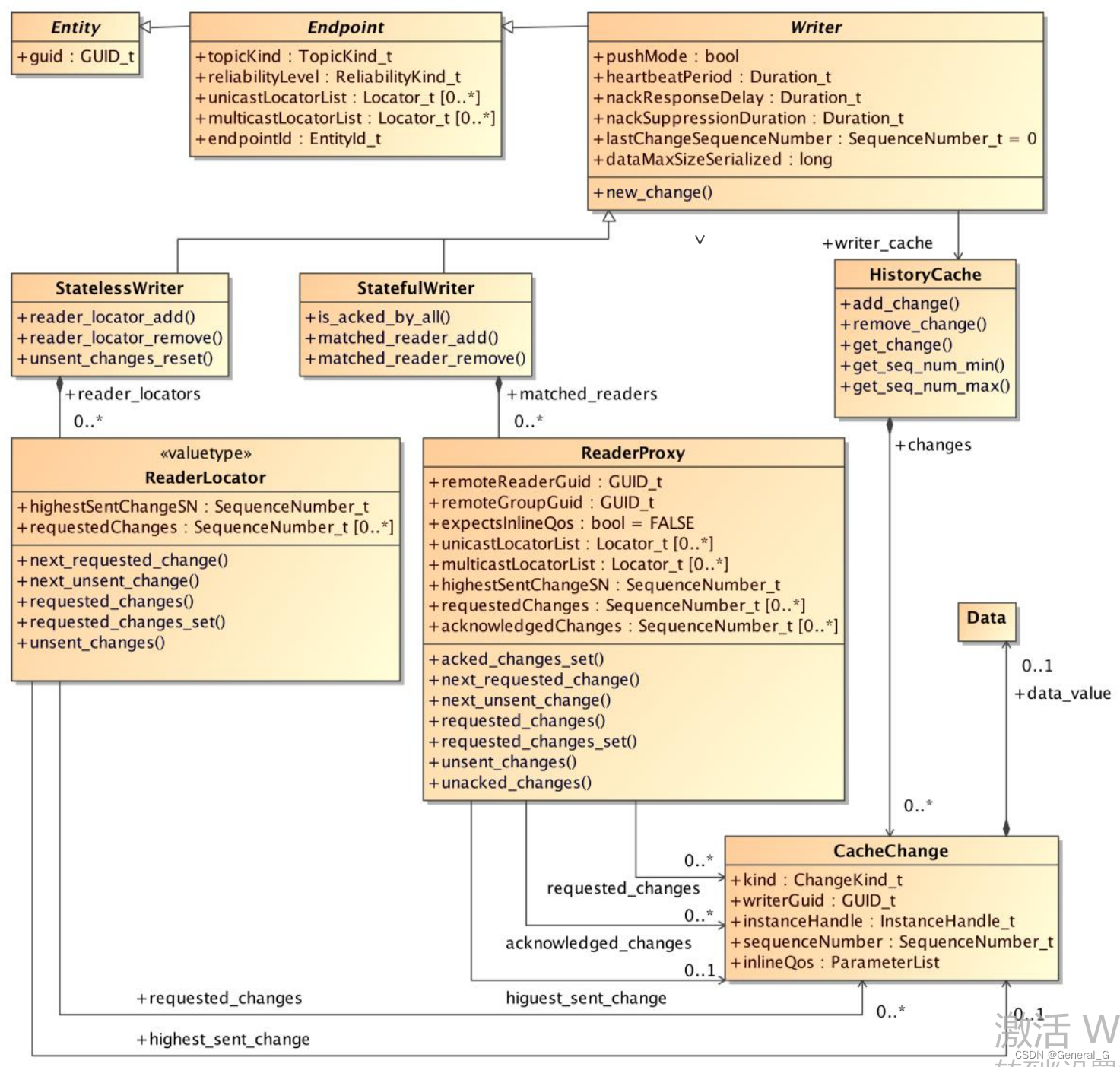
RTPS Writer
RTPS Writer属性
| attribute | type | meaning | relation to DDS |
|---|---|---|---|
| pushMode | bool | ||
| heartbeatPeriod | Duration_t | ||
| nackResponseDelay | Duration_t | ||
| nackSuppression Duration | Duration_t | ||
| lastChangeSequenceNumber | SequenceNumber_t | ||
| writer_cache | HistoryCache | ||
| dataMaxSize Serialized |
- 默认的时间相关的值
- new:new一个RTPS Writer
- new_change:new一个CacheChange并添加到RTPS Writer的HistoryCache,sequenceNumber相对上次自动+1;
++this.lastChangeSequenceNumber;
a_change := new CacheChange(kind, this.guid, this.lastChangeSequenceNumber,data, inlineQos, handle);
RETURN a_change;
RTPS StatelessWriter
StatelessWriter不需要知道匹配的readers的数量,也不需要维护匹配的Reader的任何状态;只维护RTPS ReaderLocator,用于向已经匹配的readers发送信息
StatelessWriter属性:
| attribute | type | meaning | relation to DDS |
|---|---|---|---|
| reader_locators | ReaderLocator[*] | StatelessWriter维护一个locators列表,用于发送CacheChanges. | N/A |
StatelessWriter用于以下场景:
- writer的HistoryCache交小
- 通信方式是best-effort
- writer通过multicast和很多readers通信
StatelessWriter的方法:
- new:创建一个StatelessWriter,并进行初始化:
this.readerlocators := <empty>; - reader_locator_add:将ReaderLocator对象添加到
StatelessWriter::reader_locators中,伪代码:ADD a_locator TO {this.reader_locators};; - reader_locator_remove:将ReaderLocator对象从StatelessWriter::reader_locators中移除,伪代码:
REMOVE a_locator FROM {this.reader_locators}; - unsent_changes_reset:This operation modifies the set of ‘unsent_changes’ for all the ReaderLocators in the StatelessWriter::reader_locators. The list of unsent changes is reset to match the complete list of changes available in the writer’s HistoryCache. This operation is useful when called periodically to cause the StatelessWriter to keep re-sending all available changes in its HistoryCache.伪代码:
FOREACH readerLocator in {this.reader_locators} DO readerLocator.unsent_changes := {this.writer_cache.changes}
RTPS ReaderLocator
用于跟踪所有匹配的Readers的locators,用于跟踪和管理与特定Writer匹配的所有远程Reader的位置信息。这使得Writer能够有效地定位和发送数据到正确的Reader。具体来说,ReaderLocator的主要职责是存储和管理远程Reader的网络地址(通常是IP地址和端口号)
RTPS ReaderLocator属性:
| attribute | type | meaning | relation to DDS |
|---|---|---|---|
| requested_changes | CacheChange[*] | A list of changes in the writer’s HistoryCache that were requested by remote Readers at this ReaderLocator. | |
| unsent_changes | CacheChange[*] | A list of changes in the writer’s HistoryCache that have not been sent yet to this ReaderLocator. | |
| locator | Locator_t | Unicast or multicast locator through which the readers represented by this ReaderLocator can be reached. | |
| expectsInlineQos | bool | Specifies whether the readers represented by this ReaderLocator expect inline QoS to be sent with every Data Message. |
RTPS ReaderLocator operations:
- new
- next_requested_change
- next_unsent_change
- requested_changes
- requested_changes_set
- unsent_changes
RTPS StatefulWriter
RTPS StatefulWriter用于配置所有匹配的RTPS Reader,维护每个RTPS Reader的状态,这包括每个匹配的Reader的状态,包括序列号,确认的变化,缓冲的更改,过去的交互等等。这种状态使得StatefulWriter能够提供丰富的增强功能,如确保可靠的信息交付,处理不同的发送速率和网络故障,以及跟踪未确认的更改。
通过维护每个匹配的RTPS Reader端点的状态,RTPS StatefulWriter可以确定所有匹配的RTPS Reader端点是否已收到特定的CacheChange,并且可以通过避免向已接收到Writer的HistoryCache中所有changes的reader发送announcements,从而最优化地使用网络带宽。它维护的信息也简化了写入端的基于QoS的过滤。
RTPS StatefulWriter Attributes
| attribute | type | meaning | relation to DDS |
|---|---|---|---|
| matched_readers | ReaderProxy[*] | StatefulWriter使用该字段跟踪与其匹配的所有RTPS readers。每个匹配的reader由ReaderProxy类的一个实例表示。 |
StatefulWriter Operations
- new:new一个StatefulWriter,并将matched_readers初始化为空:
this.matched_readers := <empty>; - is_acked_by_all:
- matched_reader_add
- matched_reader_remove
- matched_reader_lookup
RTPS ReaderProxy
用于维护和StatefulWriter匹配的每一个Reader的信息;
RTPS ReaderProxy Attributes:
| attribute | type | meaning | relation to DDS |
|---|---|---|---|
| remoteReaderGuid | GUID_t | 远端匹配的RTPS Reader的guid | |
| remoteGroupEntityId | EntityId_t | group中匹配的reader的EntityId | DataReader所属的Subscriber的EntityId |
| unicastLocatorList | Locator_t[*] | 用于向匹配的RTPS reader发送消息的unicast locators (transport, address, port combinations),该列表可能是空的 | |
| multicastLocatorList | Locator_t[*] | 用于向匹配的RTPS reader发送的multicast locators (transport, address, port combinations),可能为空 | |
| changes_for_reader | CacheChange[*] | 和RTPS Reader相关的CacheChange的列表——什么作用? | |
| expectsInlineQos | bool | Specifies whether the remote matched RTPS Reader expects in-line QoS to be sent along with any data. | |
| isActive | bool | 远端Reader是否需要向writer回应 |
StatefulWriter将把Writer的HistoryCache中的CacheChange changes发送到由ReaderProxy表示的匹配的RTPS reader中。
ReaderProxy Operations
- new:创建一个ReaderProxy对象
- acked_changes_set
- next_requested_change
- next_unsent_change
- requested_changes
- requested_changes_set
- unsent_changes
- unacked_changes
RTPS ChangeForReader
RTPS的ChangeForReader是一个关联类,它保存了RTPS Writer的HistoryCache中的CacheChange信息,这些信息与ReaderProxy所代表的RTPS Reader有关。换句话说,这个类是用来记录和管理RTPS Writer中的缓存改变(CacheChange)对于特定的RTPS Reader(由ReaderProxy代表)的相关信息。
RTPS StatelessWriter Behavior
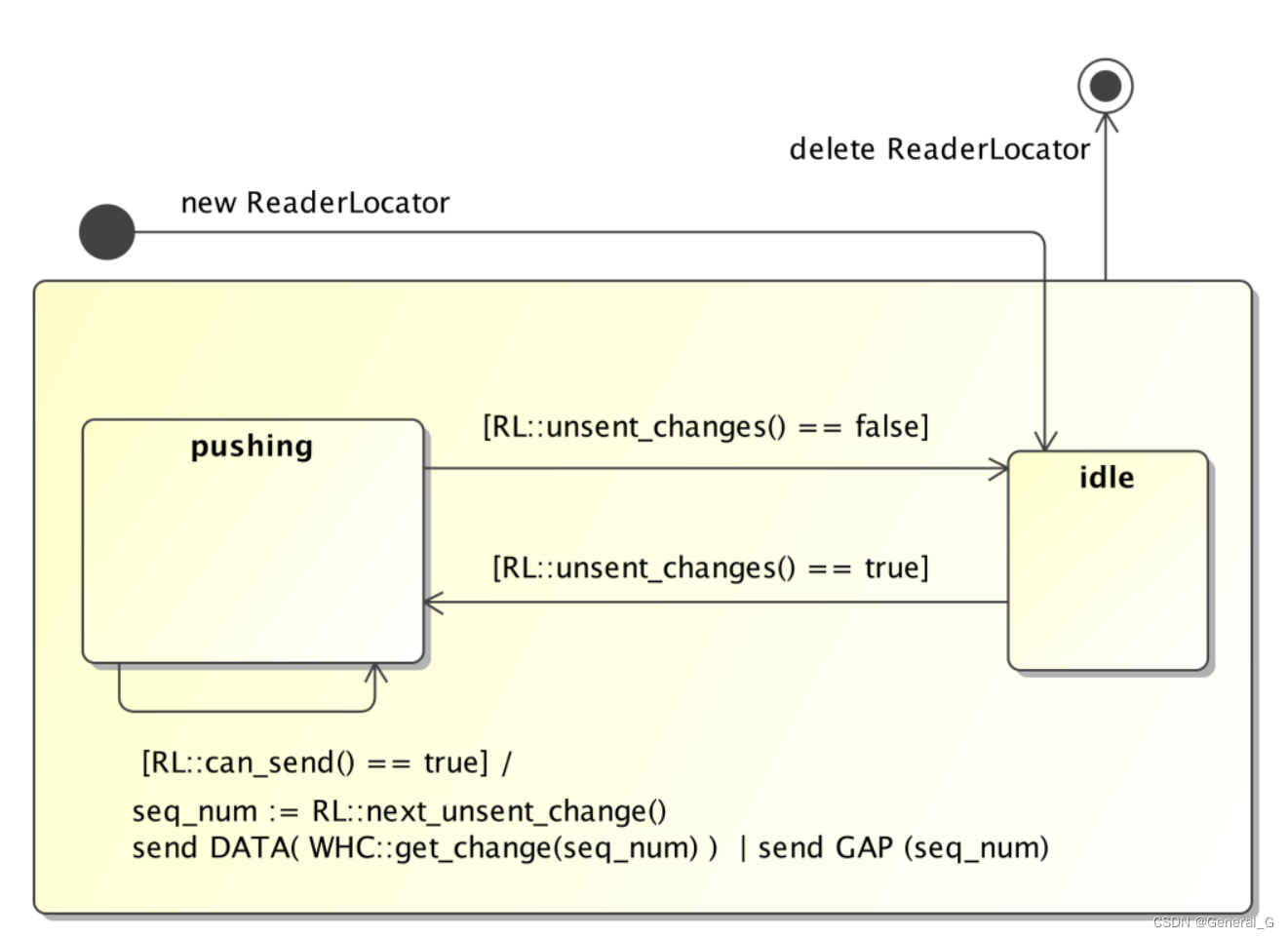
Best-Effort StatelessWriter Behavior
| Transition | state | event | next state |
|---|---|---|---|
| T1 | initial | 给RTPS Best-Effort StatelessWriter配置RTPS ReaderLocator | idle |
| T2 | idle | GuardCondition: RL::unsent_changes() != <empty> | pushing |
| T3 | pushing | GuardCondition: RL::unsent_changes() == <empty> | idle |
| T4 | pushing | GuardCondition: RL::can_send() == true | pushing |
| T5 | any state | RTPS Writer is configured to no longer have the ReaderLocator | final |
- T1:这一步是服务发现阶段完成,给RTPS Best-Effort StatelessWriter配置DataReader到RTPS ReaderLocator。
a_locator := new ReaderLocator( locator, expectsInlineQos );
the_rtps_writer.reader_locator_add( a_locator );
- 表示RTPS Writer的HistoryCache中有一些changes还没有被发送给RTPS ReaderLocator
[RL::unsent_changes() == <empty>]表明所有RTPS Writer的HistoryCache中的changes被发送到RTPS ReaderLocator中。但这并不意味着这些changes被接收到。- [RL::can_send() == true]表示RTPS Writer有一些resources需要发送change到RTPS ReaderLocator 对象中,伪代码如下:
a_change := the_reader_locator.next_unsent_change();
IF a_change IN the_writer.writer_cache.changes {DATA = new DATA(a_change);IF (the_reader_locator.expectsInlineQos) {DATA.inlineQos := the_writer.related_dds_writer.qos;DATA.inlineQos += a_change.inlineQos;}DATA.readerId := ENTITYID_UNKNOWN;sendto the_reader_locator.locator, DATA;
}
ELSE {GAP = new GAP(a_change.sequenceNumber);GAP.readerId := ENTITYID_UNKNOWN;sendto the_reader_locator.locator, GAP;
}
- RTPS Writer不再发送消息给RTPS ReaderLocator。这一步也是由服务发现完成。
the_rtps_writer.reader_locator_remove(the_reader_locator);
delete the_reader_locator;
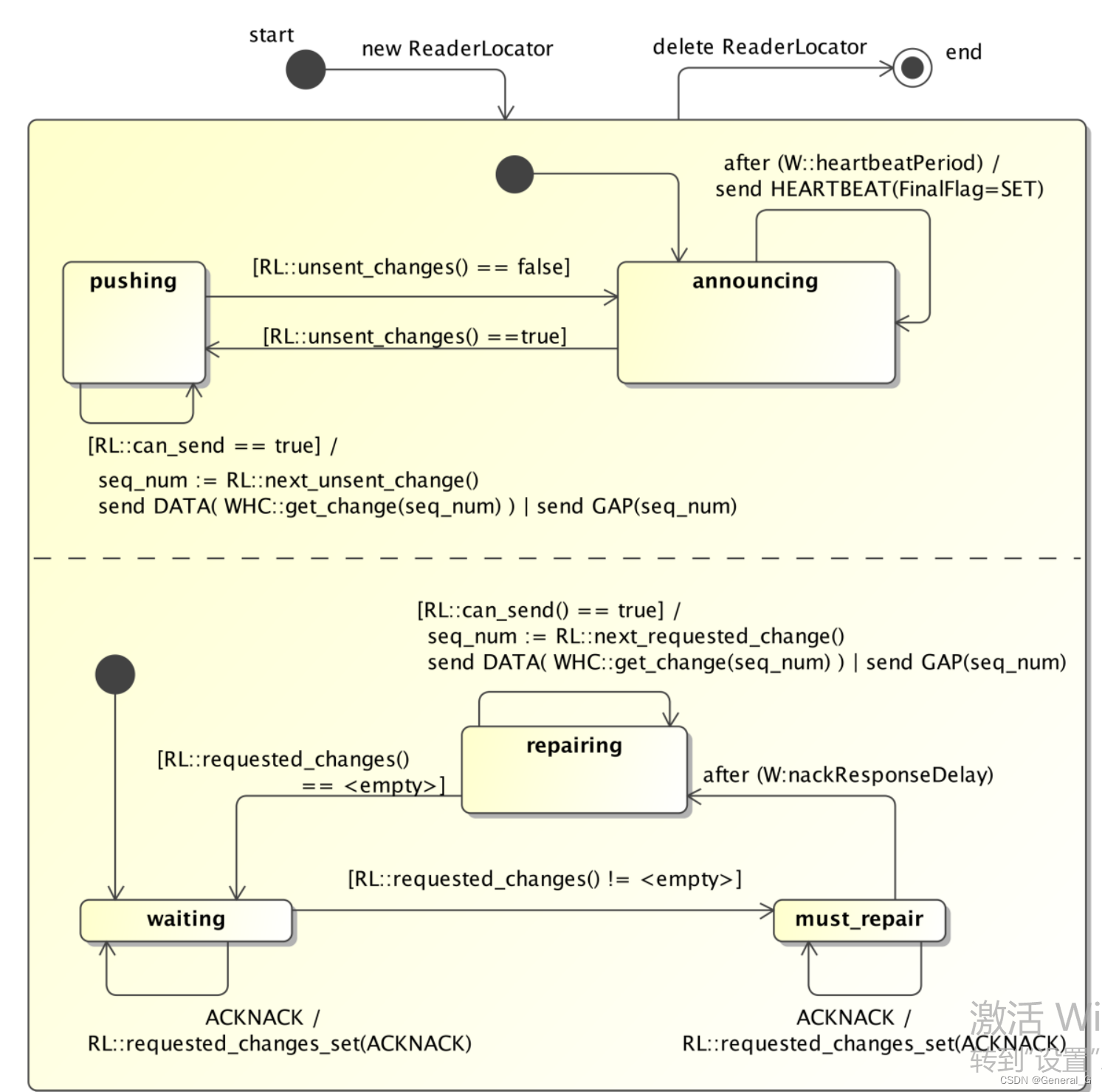
Reliable StatelessWriter Behavior
| Transition | state | event | next state |
|---|---|---|---|
| T1 | initial | RTPS Writer is configured with a ReaderLocator | announcing |
| T2 | announcing | GuardCondition: RL::unsent_changes() != <empty> | pushing |
| T3 | pushing | GuardCondition: RL::unsent_changes() == <empty> | announcing |
| T4 | pushing | GuardCondition: RL::can_send() == true | pushing |
| T5 | announcing | after(W::heartbeatPeriod) | announcing |
| T6 | waiting | ACKNACK message is received | waiting |
| T7 | waiting | GuardCondition: RL::requested_changes() != | must_repair |
| T8 | must_repair | ACKNACK message is received | must_repair |
| T9 | must_repair | after(W::nackResponseDelay) | repairing |
| T10 | repairing | GuardCondition: RL::can_send() == true | repairing |
| T11 | repairing | GuardCondition: RL::requested_changes() == | waiting |
| T12 | any state | RTPS Writer is configured to no longer have the ReaderLocator | final |
- 通过服务发现,配置Reliable StatelessWriter的ReaderLocator,将所有匹配的DataReader添加到ReaderLocator.
a_locator := new ReaderLocator( locator, expectsInlineQos );
the_rtps_writer.reader_locator_add( a_locator );
- [RL::unsent_changes() != ] 表明,RTPS Writer HistoryCache中还有changes没有发送给ReaderLocator;
- [RL::unsent_changes == ] 表明,所有RTPS Writer HistoryCache中的消息都已发送到ReaderLocator,但这并不保证这些changes已经被接收;
- [RL::can_send() == true]表明RTPS Writer有一些resources需要发送给ReaderLocator对象。执行流程如下:
a_change := the_reader_locator.next_unsent_change();
DATA = new DATA(a_change);
IF (the_reader_locator.expectsInlineQos) { DATA.inlineQos := the_writer.related_dds_writer.qos;
}
DATA.readerId := ENTITYID_UNKNOWN;
sendto the_reader_locator.locator, DATA;
After the transition the following post-conditions hold:
( a_change BELONGS-TO the_reader_locator.unsent_changes() ) == FALSE
- 这个状态转变由W::heartbeatPeriod.的timer触发,执行逻辑如下:
seq_num_min := the_rtps_writer.writer_cache.get_seq_num_min();
seq_num_max := the_rtps_writer.writer_cache.get_seq_num_max();
HEARTBEAT := new HEARTBEAT(the_rtps_writer.writerGuid, seq_num_min,
seq_num_max);
HEARTBEAT.FinalFlag := SET;
HEARTBEAT.readerId := ENTITYID_UNKNOWN;
sendto the_reader_locator, HEARTBEAT;
- 这个状态转换是由于RTPS StatelessWriter接收到一个由某个RTPS Reader发送的ACKNACK message而触发的,执行以下逻辑:
FOREACH reply_locator_t IN { Receiver.unicastReplyLocatorList,
Receiver.multicastReplyLocatorList }
reader_locator := the_rtps_writer.reader_locator_lookup(reply_locator_t); reader_locator.requested_changes_set(ACKNACK.readerSNState.set);
需要注意的是处理这类消息使用RTPS Receiver中的reply locators。这是StatelessWriter确定发送回复的位置的唯一信息源。协议的正常运行需要RTPS Reader在AckNack前插入一个InfoReply Submessage,以便正确设置这些字段。
- 这个状态转换由guard condition
[RL::requested_changes() != <empty>]触发,表明RTPS ReaderLocator中的有一些RTPS Reader的request - 这个状态转换是由于RTPS StatelessWriter收到由RTPS Reader发送的ACKNACK消息。
- 这个状态转换是由一个定时器触发的,表示自从进入must_repair状态以来,W::nackResponseDelay的持续时间已经过去。不执行任何逻辑操作。
- todo
- todo
- todo
RTPS StatefulWriter Behavior
Best-Effort StatefulWriter
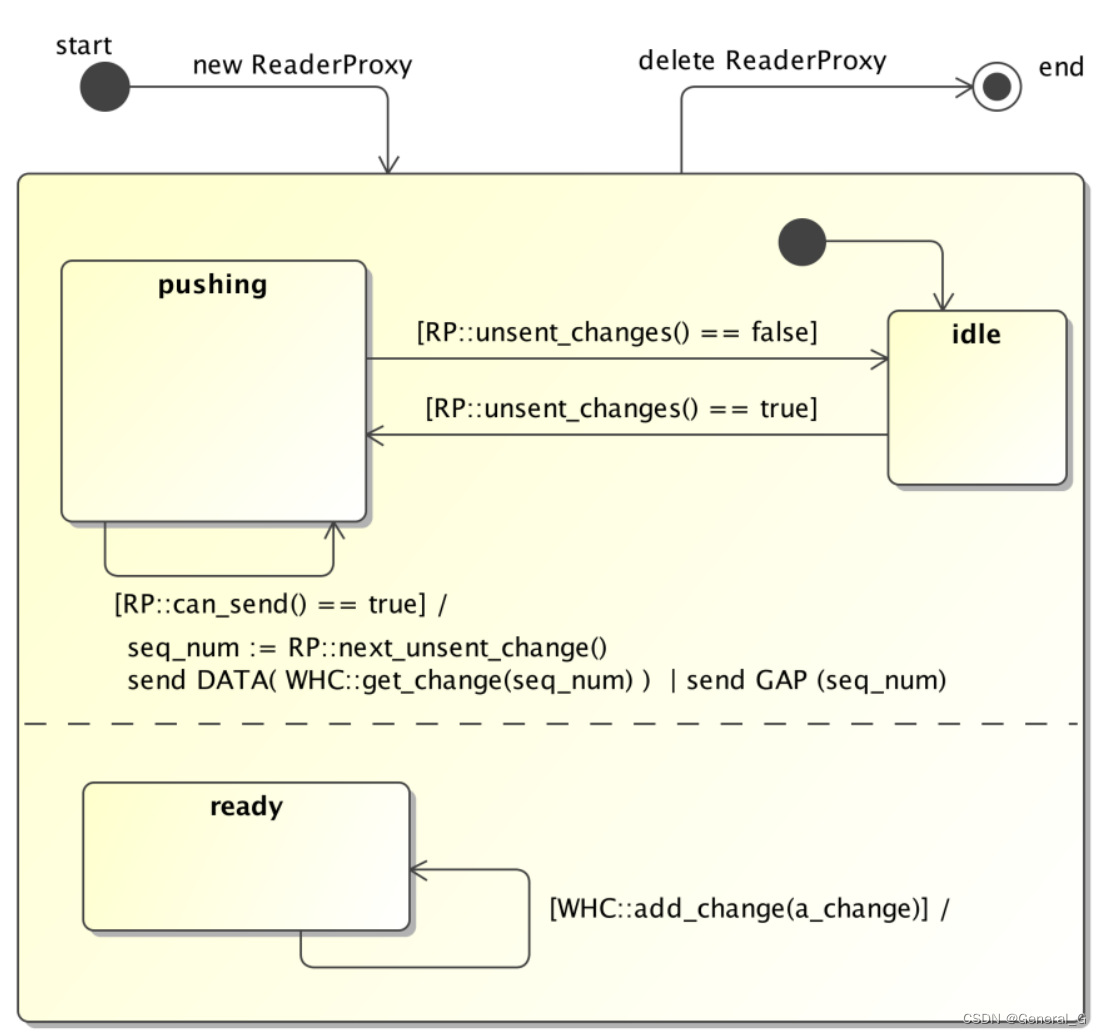
| Transition | state | event | next state |
|---|---|---|---|
| T1 | initial | RTPS Writer匹配到了RTPS Reader | idle |
| T2 | idle | GuardCondition: RP::unsent_changes() != <empty> | pushing |
| T3 | pushing | GuardCondition: RP::unsent_changes() == <empty> | idle |
| T4 | pushing | GuardCondition: RP::can_send() == true | pushing |
| T5 | ready | 一个新的change被添加到RTPS Writer’s HistoryCache中 | ready |
| T6 | any state | RTPS Writer不再有匹配的RTPS Reader | final |
- 这个状态的转变是由RTPS Writer配置到了匹配的RTPS Reader。配置动作是由服务发现完成DataReader匹配到了DataWriter。服务发现提供了初始化一个ReaderProxy对象的参数;执行如下操作:
a_reader_proxy := new ReaderProxy( remoteReaderGuid,remoteGroupEntityId, expectsInlineQos, unicastLocatorList, multicastLocatorList);
the_rtps_writer.matched_reader_add(a_reader_proxy);
- 这个状态转变由
[RP::unsent_changes() != <empty>]触发,表明RTPS HistoryCache中有一些changes没有发送给代表RTPS Reader的ReaderProxy - 这个状态转变由
[RP::unsent_changes() == <empty>]触发,表示RTPS Writer HistoryCache中所有changes都被发送给了代表RTPS Reader的ReaderProxy。但这并不意味着changes被接收到, - 这个状态转变由
[RP::can_send() == true]触发,表示RTPS Writer有一些resources需要发送给代表RTPS Reader的ReaderProxy。执行以下操作:
a_change := the_reader_proxy.next_unsent_change();
a_change.status := UNDERWAY;
if (a_change.is_relevant) { DATA = new DATA(a_change);IF (the_reader_proxy.expectsInlineQos) {DATA.inlineQos := the_rtps_writer.related_dds_writer.qos;DATA.inlineQos += a_change.inlineQos;}DATA.readerId := ENTITYID_UNKNOWN;send DATA;
} else {GAP = new GAP(a_change.sequenceNumber);GAP.readerId := ENTITYID_UNKNOWN;Send GAP;
}
上述逻辑并不意味着每个DATA Submessage以分离的形式发送,相反多个子消息可以组合成一个RTPS message。
- 这个转变是由于添加了一个新的CacheChange到HistoryCache中。这个change是否和代表RTPS Reader的ReaderProxy有关,是由DDS_FILTER决定。执行逻辑如下:
ADD a_change TO the_reader_proxy.changes_for_reader;
IF (DDS_FILTER(the_reader_proxy, change)) THEN change.is_relevant := FALSE;
ELSE change.is_relevant := TRUE;
IF (the_rtps_writer.pushMode == true) THEN change.status := UNSENT;
ELSE change.status := UNACKNOWLEDGED;
- 这个状态转变是由于RTPS Writer不再和ReaderProxy代表的RTPS Reader匹配。执行如下操作:
the_rtps_writer.matched_reader_remove(the_reader_proxy);
delete the_reader_proxy;
Reliable StatefulWriter
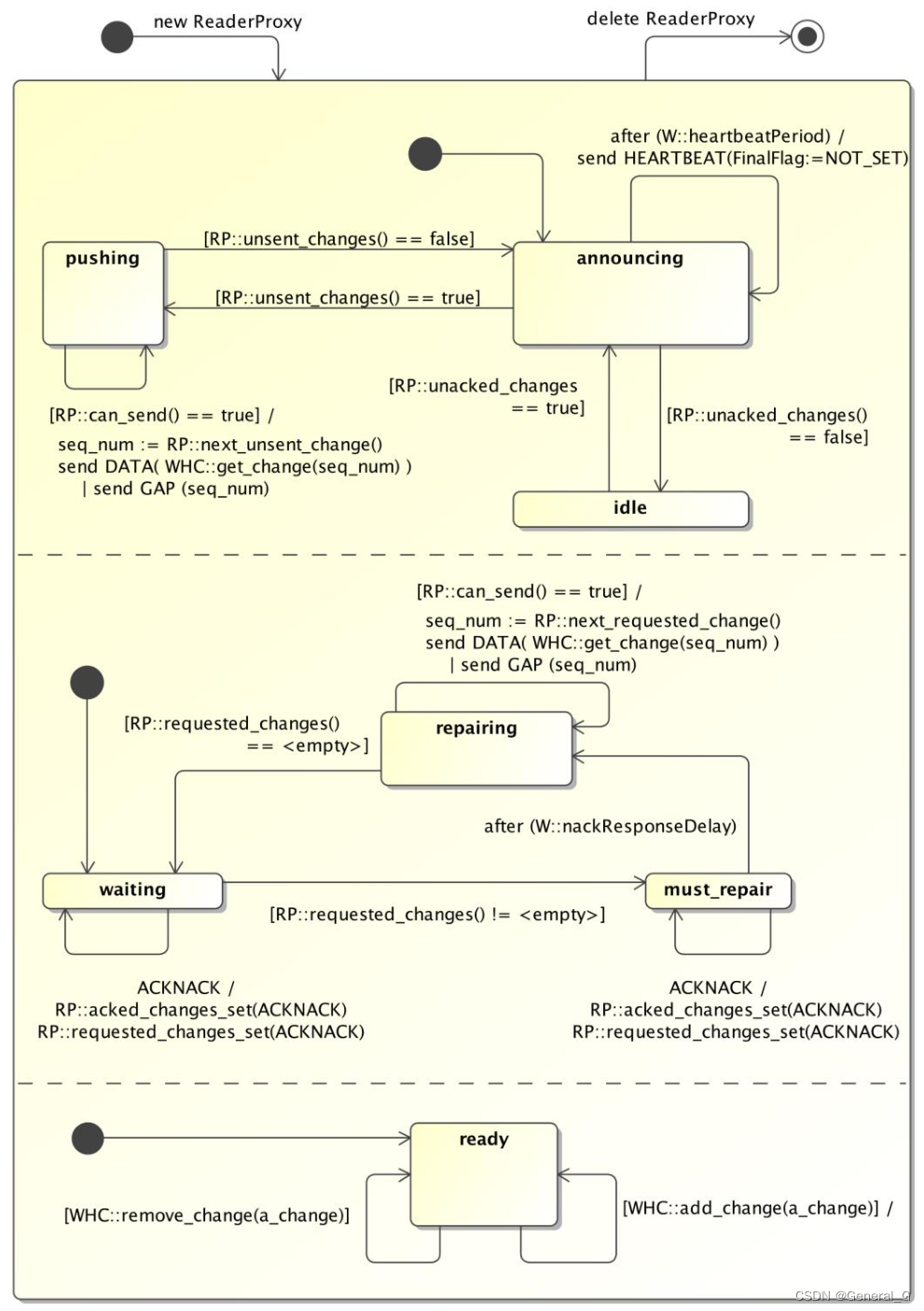
| Transition | state | event | next state |
|---|---|---|---|
| T1 | initial | RTPS Writer匹配到了RTPS Reader | announcing |
| T2 | announcing | GuardCondition: RP::unsent_changes() != <empty> | pushing |
| T3 | pushing | GuardCondition: RP::unsent_changes() == <empty> | announcing |
| T4 | pushing | GuardCondition: RP::can_send() == true | pushing |
| T5 | announcing | GuardCondition: RP::unacked_changes() == <empty> | idle |
| T6 | idle | GuardCondition: RP::unacked_changes() != <empty> | announcing |
| T7 | announcing | after(W::heartbeatPeriod) | announcing |
| T8 | waiting | ACKNACK消息被接收 | waiting |
| T9 | waiting | GuardCondition: RP::requested_changes() != <empty> | must_repair |
| T10 | must_repair | ACKNACK message被接收 | must_repair |
| T11 | must_repair | after(W::nackResponseDelay) | repairing |
| T12 | repairing | GuardCondition: RP::can_send() == true | repairing |
| T13 | repairing | GuardCondition: RP::requested_changes() == <empty> | waiting |
| T14 | ready | 一个change添加到RTPS Writer’s HistoryCache | ready |
| T15 | ready | 一个change从RTPS Writer’s HistoryCache中移除 | ready |
| T16 | any state | RTPS Writer不再和RTPS Reader匹配 | final |
Writer Liveliness Protocol
DDS标准要求存在一个活跃性机制,RTPS用来实现这个要求的就是Writer Liveliness Protocol。这个协议定义了两个participant之间,为了确认它们所包含的Writer的活跃性所需要的信息交换。在这里,Writer通常指的是在数据传输过程中,负责产生和发送数据的实体或组件。
Writer Liveliness Protocol使用预先定义的内置的Endpoints。使用内置端点意味着一旦一个参与者知道了另一个参与者的存在,它可以假定远程参与者提供的内置端点的存在,并与本地匹配的内置端点建立关联。——?用于内置端点之间通信的协议与用于应用定义端点的协议相同。
built-in Endpoints
Writer Liveliness Protocol要求的built-in Endpoints是BuiltinParticipantMessageWriter和BuiltinParticipantMessageReader.这些Endpoints被用于liveliness,但是在以后也可以被用于其他数据;
RTPS 协议为这些built-in Endpoints预留的EntityId_t:
- ENTITYID_P2P_BUILTIN_PARTICIPANT_MESSAGE_WRITER
- ENTITYID_P2P_BUILTIN_PARTICIPANT_MESSAGE_READER
Qos
为了交互,BuiltinParticipantMessageWriter 和 BuiltinParticipantMessageReader使用如下Qos:
- durability.kind = TRANSIENT_LOCAL_DURABILITY
- history.kind = KEEP_LAST_HISTORY_QOS
- history.depth = 1
BuiltinParticipantMessageWriter shall use reliability.kind = RELIABLE_RELIABILITY_QOS,BuiltinParticipantMessageReader既可以使用RELIABLE_RELIABILITY_QOS 也可以使用 BEST_EFFORT_RELIABILITY_QOS. 如果BuiltinParticipantMessageReader使用BEST_EFFORT_RELIABILITY_QOS,那么ParticipantProxy::builtinEndpointQos中就会设置BEST_EFFORT_PARTICIPANT_MESSAGE_DATA_READER flag.
If the ParticipantProxy::builtinEndpointQos is included in the SPDPdiscoveredParticipantData, then the BuiltinParticipantMessageWriter shall treat the BuiltinParticipantMessageReader as indicated by the flags. If the ParticipantProxy::builtinEndpointQos is not included then the BuiltinParticipantMessageWriter shall treat the BuiltinParticipantMessageReader as if it is configured with RELIABLE_RELIABILITY_QOS.
Data Types
同其他RTPS Endpoint一样,RTPS built-in Endpoints也有HistoryCache存储changes。
RTPS built-in Endpoint中DCPSParticipantMessage Topic使用的Data type:
使用BuiltinParticipantMessageWriter和BuiltinParticipantMessageReader实现Writer Liveliness Protocol
通过向BuiltinParticipantMessageWriter写入一个sample,就可以判断一个participant的一部分writer的liveliness。如果Participant包含一个或多个liveliness为AUTOMATIC_LIVELINESS_QOS的Writers,
Optional Behavior
Large Data
传输可能会限制最大数据包大小(例如,UDP的最大值为64K),从而限制最大的RTPS子消息大小。这主要影响数据子消息,因为它限制了serializedData的最大大小,或者使用的数据类型的最大序列化大小。为了解决这个限制,以下子消息实现了对大数据的分段:
- DataFrag
- HeartbeatFrag
- NackFrag
下面列出了交互所需的相应行为
如何选择fragment的size
fragment size的大小由Writer以及下面条件:
- 所有Writer有效的传输方式必须至少能容纳包含一个片段的DataFrag子消息,这意味着具有最小最大消息大小的传输方式决定了片段的大小。
- 对于特定的编写者,片段大小必须是固定的,并且对于所有远程readers都是相同的。通过固定片段大小,片段编号所指的数据不依赖于特定的远程reader。这简化了来自reader的NackFrag的处理。
- 片段大小必须 <= 65536字节
注意,片段大小由writer可用的所有传输方式确定,而不仅仅是到达所有当前已知reader所需的传输方式的子集(什么意思?)。这确保了新发现的readers,无论他们可以通过哪种传输方式到达,都可以在不改变片段大小的情况下进行适应,否则将违反上述要求。
如何发送片段
如果分段要求将Data Submessage分成若干DataFrag Submessages,需要满足以下要求:
- DataFrag Submessages需要按顺序发送,序号是fragment numbers递增的,但注意这并不保证按顺序达到
- Data只能在被要求的时候分段。如果多种传输方式对Writer有效,其中一些传输方式不要求分段,那么就应该在这些传输方式上发送Data Submessage。同样,对于可变大小的数据类型,如果对于特定的序列号不需要进行分段,那么就应该使用常规的Data Submessage(后一句啥意思)
- 对于给定的序列号,如果使用了内联的QoS(服务质量)参数,那么必须将这些参数与第一个DataFrag子消息(包含碎片编号等于1的碎片)一起包含。对于该序列号的后续DataFrag子消息,也可以包含这些参数,但这并不是必须的。这段说明主要指出了在使用QoS参数时的处理方式和要求。
如何重组分片
DataFrag Submessages包含了所有需要重组data的信息,一旦所有片段都收到,就可以作为常规Data Submessage处理。实现上也必须要能够处理乱序到达的DataFrag submessages。
Reliable通信
在可靠地发送DataFrag Submessage的协议行为上,除了要满足发送常规Data Submessage的要求外,还需满足以下条件:
- 心跳子消息的语义保持不变:心跳消息只能包括所有片段都可用的序列号。也就是说,心跳消息的发送应该仅限于那些所有数据片段都已经准备就绪,可以进行发送的序列号,不能包含那些尚未准备就绪的序列号。这就确保了数据传输的完整性和可靠性。
- AckNack子消息的语义保持不变:只有在接收到特定序列号的所有片段时,AckNack消息才能对该序列号进行肯定确认。同样,只有在所有片段都丢失时,才能对序列号进行否定确认。这就意味着,AckNack消息只有在数据完全收到或完全丢失的情况下才能进行确认,确保了数据传输的准确性和可靠性。
- 为了对某一给定序列号的片段子集进行否定确认,必须使用NackFrag Submessage。当数据被分片时,心跳可能会触发AckNack和NackFrag Submessage。
另外,
- As mentioned above, a Heartbeat Submessage can only include a sequence number once all fragments for that sequence number are available. If a Writer wants to inform a Reader on the partial availability of fragments for a given sequence number, a HeartbeatFrag Submessage can be used instead. Fragment level reliability may be helpful for very large data and when using flow control.
- NackFrag Submessage消息只能用来回应Heartbeat或HeartbeatFrag submessage.
相关文章:
RTPS协议之Behavior Module
目录 交互要求基本要求RTPS Writer 行为RTPS Reader行为 RTPS协议的实现与Reader匹配的Writer的行为涉及到的类型RTPS Writer实现RTPS WriterRTPS StatelessWriterRTPS ReaderLocatorRTPS StatefulWriterRTPS ReaderProxyRTPS ChangeForReader RTPS StatelessWriter BehaviorBe…...
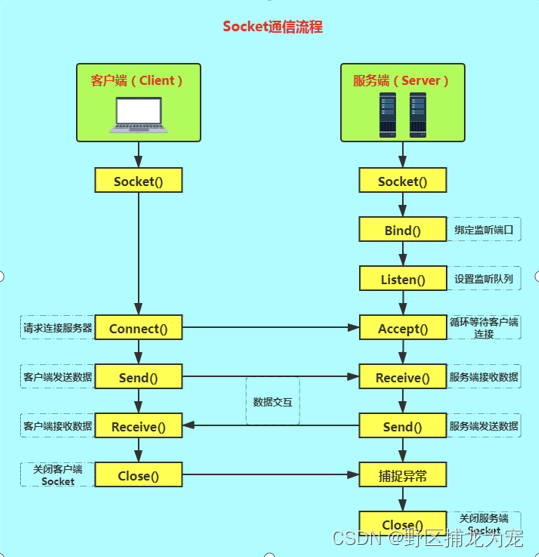
Socket网络通讯入门(一)
提示:能力有限,不足以及错误之处还请指出! 文章目录 前言一、 计算机网络 OSI、TCP/IP、五层协议 体系结构1.OSI七层模型每层的作用2.TCP/IP协议分成3.五层协议体系结构 二、Socket服务端和客户端 简单通信1.服务端代码2.客户端 总结 前言 简…...

第十五课,海龟画图:抬笔与落笔函数、画曲线函数
一,turtle.penup()和turtle.pendown():抬起与落下画笔函数 当使用上节课学习的这个turtle.forward():画笔前进函数时,画笔会朝着当前方向在画布上留下一条指定(像素)长度的直线,但你可能发现&a…...

【机器学习】让大模型变得更聪明
文章目录 前言1. 理解大模型的局限性1.1 理解力的挑战1.2 泛化能力的挑战1.3 适应性的挑战 2. 算法创新:提高模型学习和推理能力2.1 自监督学习2.2 强化学习2.3 联邦学习 3. 数据质量与多样性:增强模型的泛化能力3.1 高质量数据的获取3.2 数据多样性的重…...

5.26机器人基础-DH参数 正解
1.建立DH坐标系 1.确定Zi轴(关节轴) 2.确定基础坐标系 3.确定Xi方向(垂直于zi和zi1的平面) 4.完全确定各个坐标系 例子: 坐标系的布局是由个人决定的,可以有不同的选择 标准坐标系布局: …...
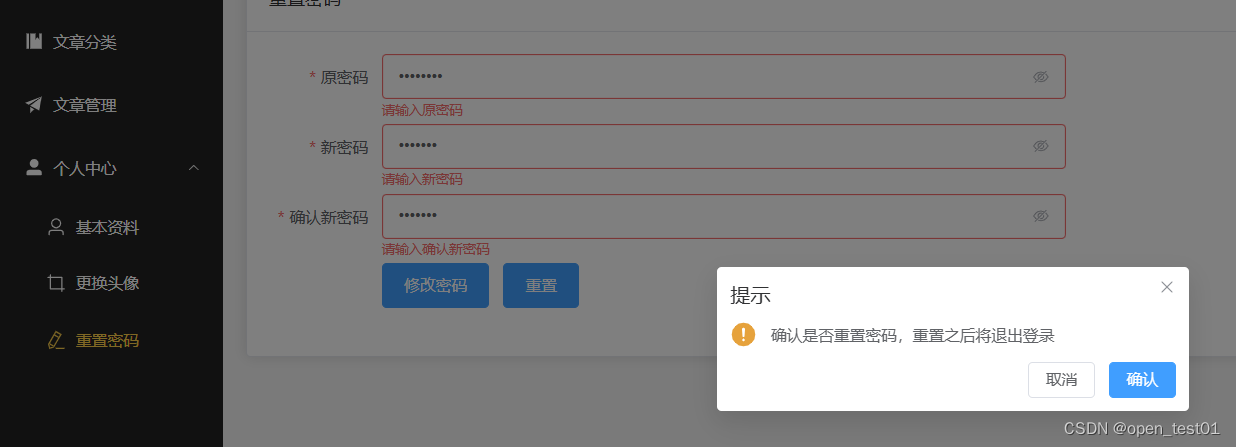
Vue3项目练习详细步骤(第五部分:用户模块的功能)
顶部导航栏个人信息显示 接口文档 接口请求与绑定 导航栏下拉菜单功能 路由实现 退出登录和路由跳转实现 基本资料修改 页面结构 接口文档 接口请求与绑定 修改头像 页面结构 头像回显 头像上传 接口文档 重置密码 页面结构 接口文档 接口请求与绑定 顶部导航…...

测试onlyoffice在线预览文件功能
HTML示例代码 <!DOCTYPE html> <html lang"zh"><head><meta charset"UTF-8"><title>测试onlyoffice在线预览文件功能</title><script type"text/javascript" src"http://onlyoffice服务器ip:端口/…...

Day57 每日温度 + 下一个更大元素Ⅰ
739 每日温度 题目链接:739.每日温度 给定一个整数数组 temperatures ,表示每天的温度,返回一个数组 answer ,其中 answer[i] 是指对于第 i 天,下一个更高温度出现在几天后。如果气温在这之后都不会升高,…...
)
nuxt3 api如何透传(不引第3方库)
背景: nuxt做为一个vue的服务端渲染框架,本身就具备服务端的功能,理论上可以完整做一个系统功能,包括对数据库等等操作,但更合理的做法是nuxt应该定位只做服务端渲染的事情,更偏向ui层面,而非数据curd,业务逻辑,权限等等偏向服务端的逻辑。本身基于vue的服务端渲染已…...
list常用接口模拟实现
文章目录 一、模拟list类的框架二、函数接口实现1、迭代器接口2、常用删除、插入接口3、常用其他的一些函数接口4、默认成员函数 一、模拟list类的框架 1、使用带哨兵的双向链表实现。 2、链表结点: // List的结点类 template<class T> struct ListNode {Li…...
 —— Stylelint(v16.6.1):CSS/SCSS 代码质量工具)
前端工程化工具系列(三) —— Stylelint(v16.6.1):CSS/SCSS 代码质量工具
Stylelint 是 CSS/SCSS 代码的静态分析工具,用于检查代码中的错误和样式违规。 1. 环境要求 v16 以上的 Stylelint,支持 Node.js 的版本为 v18.12.0。 在命令行中输入以下内容来查看当前系统中 node 的版本。 node -vNode.js 推荐使用 v18.20.3 或者 …...

crossover mac好用吗 CrossOver Mac怎么下载 Mac用crossover损害电脑吗
CrossOver 是一款可以让Mac用户能够自由运行和游戏windows游戏软件的虚拟机类应用,虽然能够虚拟windows但是却并不是一款虚拟机,也不需要重启系统或者启动虚拟机,类似于一种能够让mac系统直接运行windows软件的插件。它以其出色的跨平台兼容性…...

PHP模块pdo_sqlite.so: undefined symbol: sqlite3_column_table_name
安装 php-sqlite3 之后,执行php -m 命令有警告,如下 PHP Warning: PHP Startup: Unable to load dynamic library pdo_sqlite (tried: /usr/lib64/php/modules/pdo_sqlite (/usr/lib64/php/modules/pdo_sqlite: cannot open shared object file: No su…...
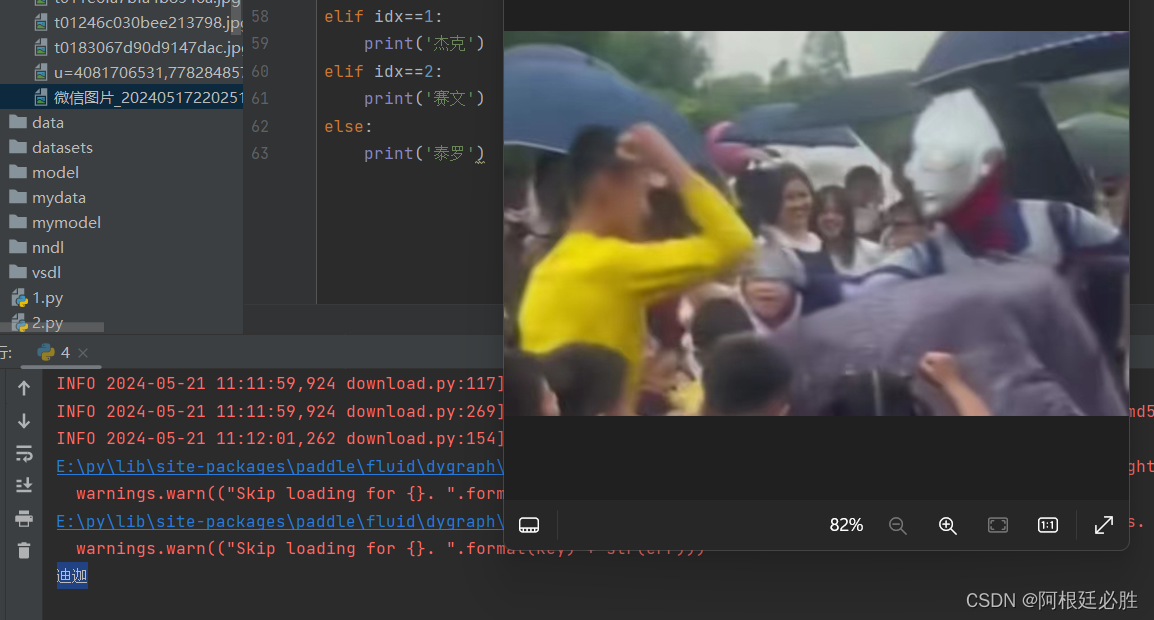
卷积神经网络-奥特曼识别
数据集 四种奥特曼图片_数据集-飞桨AI Studio星河社区 (baidu.com) 中间的隐藏层 已经使用参数的空间 Conv2D卷积层 ReLU激活层 MaxPool2D最大池化层 AdaptiveAvgPool2D自适应的平均池化 Linear全链接层 Dropout放置过拟合,随机丢弃神经元 -----------------…...
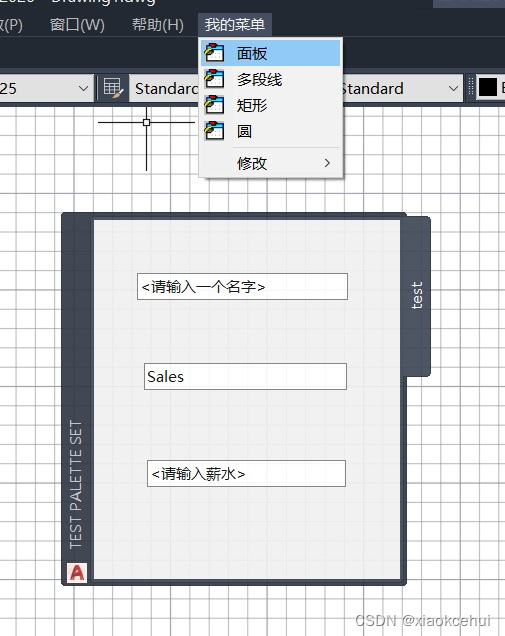
VB.net进行CAD二次开发(四)
netload不能弹出对话框,参考文献2 参考文献1说明了自定义菜单的问题,用的是cad的系统命令 只要加载了dll,自定义的命令与cad的命令同等地位。 这时,可以将自定义菜单的系统命令替换为自定义命令。 <CommandMethod("Add…...

3步轻松月入过万,APP广告新模式大揭秘!
万万没想到:用这个APP广告模式,月入过万竟然如此简单! 在移动应用开发的世界里,变现一直是一道难题。 许多APP开发者和产品经理为了提高收益、增强用户黏性,不断尝试各种策略。 然而,很多时候,…...

java项目之智能家居系统源码(springboot+vue+mysql)
风定落花生,歌声逐流水,大家好我是风歌,混迹在java圈的辛苦码农。今天要和大家聊的是一款基于springboot的智能家居系统。项目源码以及部署相关请联系风歌,文末附上联系信息 。 项目简介: 基于Springboot的智能家居系…...

前端 JS 经典:读取文件原始内容
前言:有些时候在工程化开发中,我们需要读取文件里面的原始内容,比如,你有一个文件,后缀名为 .myfile,你需要拿到这个文件里的内容,该怎么处理呢。 在 vue2 中,因为 vue2 使用 vue-c…...
汇编概论和实践
一 汇编第一例 C代码 #include <stdio.h>int main() {printf("Hello, World!\n");return 0; }对应的汇编 .LC0:.string "Hello, World!"main:pushq %rbpmovq %rsp, %rbpleaq .LC0(%rip), %rdicall puts@PLTmovl $0, %eaxpopq %rbpret 二 CPU架构…...
铁塔基站用能监控能效解决方案
截至2023年10月,我国5G基站总数达321.5万个,占全国通信基站总数的28.1%。然而,随着5G基站数量的快速增长,基站的能耗问题也逐渐日益凸显,基站的用电给运营商带来了巨大的电费开支压力,降低5G基站的能耗成为…...

conda相比python好处
Conda 作为 Python 的环境和包管理工具,相比原生 Python 生态(如 pip 虚拟环境)有许多独特优势,尤其在多项目管理、依赖处理和跨平台兼容性等方面表现更优。以下是 Conda 的核心好处: 一、一站式环境管理:…...
Prompt Tuning、P-Tuning、Prefix Tuning的区别
一、Prompt Tuning、P-Tuning、Prefix Tuning的区别 1. Prompt Tuning(提示调优) 核心思想:固定预训练模型参数,仅学习额外的连续提示向量(通常是嵌入层的一部分)。实现方式:在输入文本前添加可训练的连续向量(软提示),模型只更新这些提示参数。优势:参数量少(仅提…...
从深圳崛起的“机器之眼”:赴港乐动机器人的万亿赛道赶考路
进入2025年以来,尽管围绕人形机器人、具身智能等机器人赛道的质疑声不断,但全球市场热度依然高涨,入局者持续增加。 以国内市场为例,天眼查专业版数据显示,截至5月底,我国现存在业、存续状态的机器人相关企…...
屋顶变身“发电站” ,中天合创屋面分布式光伏发电项目顺利并网!
5月28日,中天合创屋面分布式光伏发电项目顺利并网发电,该项目位于内蒙古自治区鄂尔多斯市乌审旗,项目利用中天合创聚乙烯、聚丙烯仓库屋面作为场地建设光伏电站,总装机容量为9.96MWp。 项目投运后,每年可节约标煤3670…...

关于 WASM:1. WASM 基础原理
一、WASM 简介 1.1 WebAssembly 是什么? WebAssembly(WASM) 是一种能在现代浏览器中高效运行的二进制指令格式,它不是传统的编程语言,而是一种 低级字节码格式,可由高级语言(如 C、C、Rust&am…...

uniapp中使用aixos 报错
问题: 在uniapp中使用aixos,运行后报如下错误: AxiosError: There is no suitable adapter to dispatch the request since : - adapter xhr is not supported by the environment - adapter http is not available in the build 解决方案&…...
HDFS分布式存储 zookeeper
hadoop介绍 狭义上hadoop是指apache的一款开源软件 用java语言实现开源框架,允许使用简单的变成模型跨计算机对大型集群进行分布式处理(1.海量的数据存储 2.海量数据的计算)Hadoop核心组件 hdfs(分布式文件存储系统)&a…...
佰力博科技与您探讨热释电测量的几种方法
热释电的测量主要涉及热释电系数的测定,这是表征热释电材料性能的重要参数。热释电系数的测量方法主要包括静态法、动态法和积分电荷法。其中,积分电荷法最为常用,其原理是通过测量在电容器上积累的热释电电荷,从而确定热释电系数…...

代码随想录刷题day30
1、零钱兑换II 给你一个整数数组 coins 表示不同面额的硬币,另给一个整数 amount 表示总金额。 请你计算并返回可以凑成总金额的硬币组合数。如果任何硬币组合都无法凑出总金额,返回 0 。 假设每一种面额的硬币有无限个。 题目数据保证结果符合 32 位带…...
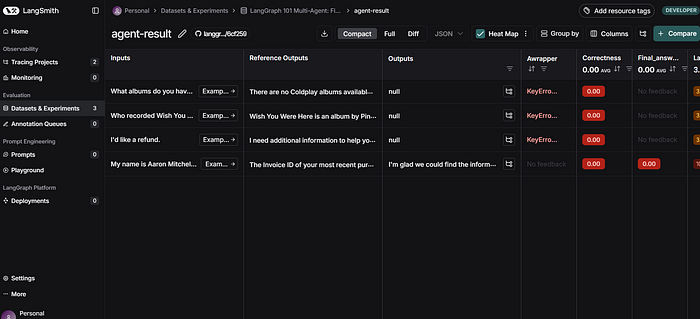
使用LangGraph和LangSmith构建多智能体人工智能系统
现在,通过组合几个较小的子智能体来创建一个强大的人工智能智能体正成为一种趋势。但这也带来了一些挑战,比如减少幻觉、管理对话流程、在测试期间留意智能体的工作方式、允许人工介入以及评估其性能。你需要进行大量的反复试验。 在这篇博客〔原作者&a…...