在ROS2中,通过MoveIt2控制Gazebo中的自定义机械手
目前的空余时间主要都在研究ROS2,最终目的是控制自己用舵机组装的机械手。
由于种种原因,先控制Gazebo的自定义机械手。
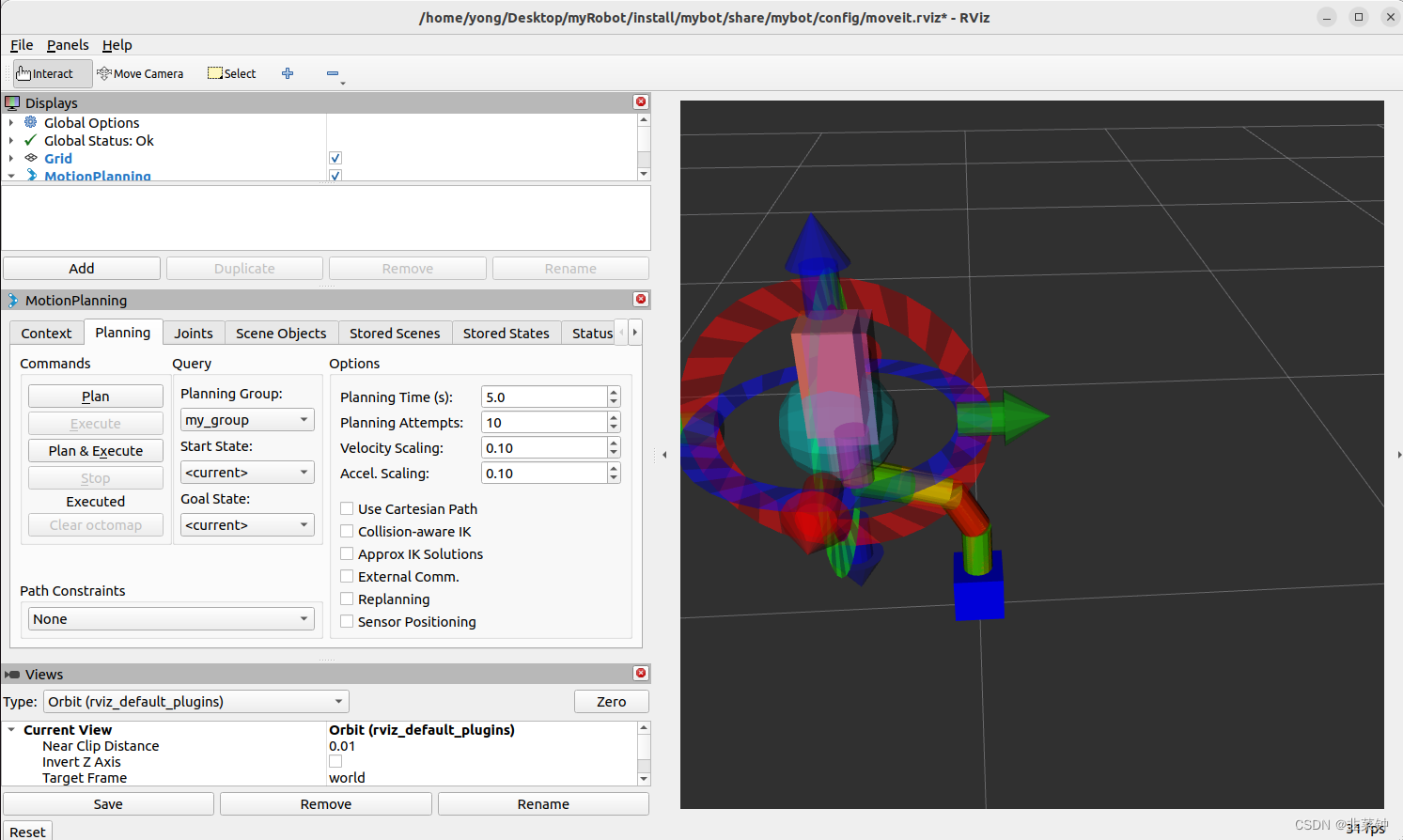
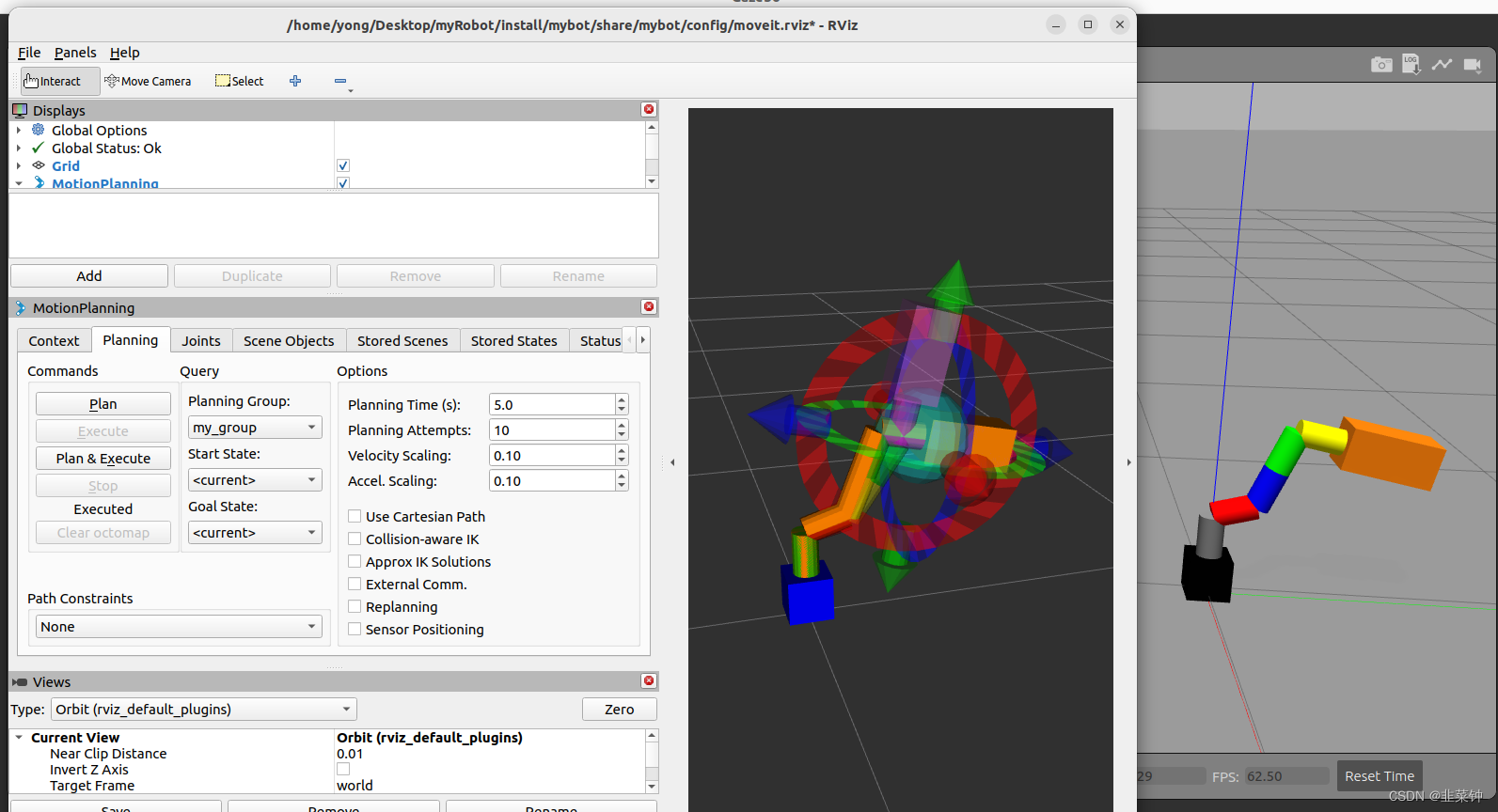
先看看目前的成果
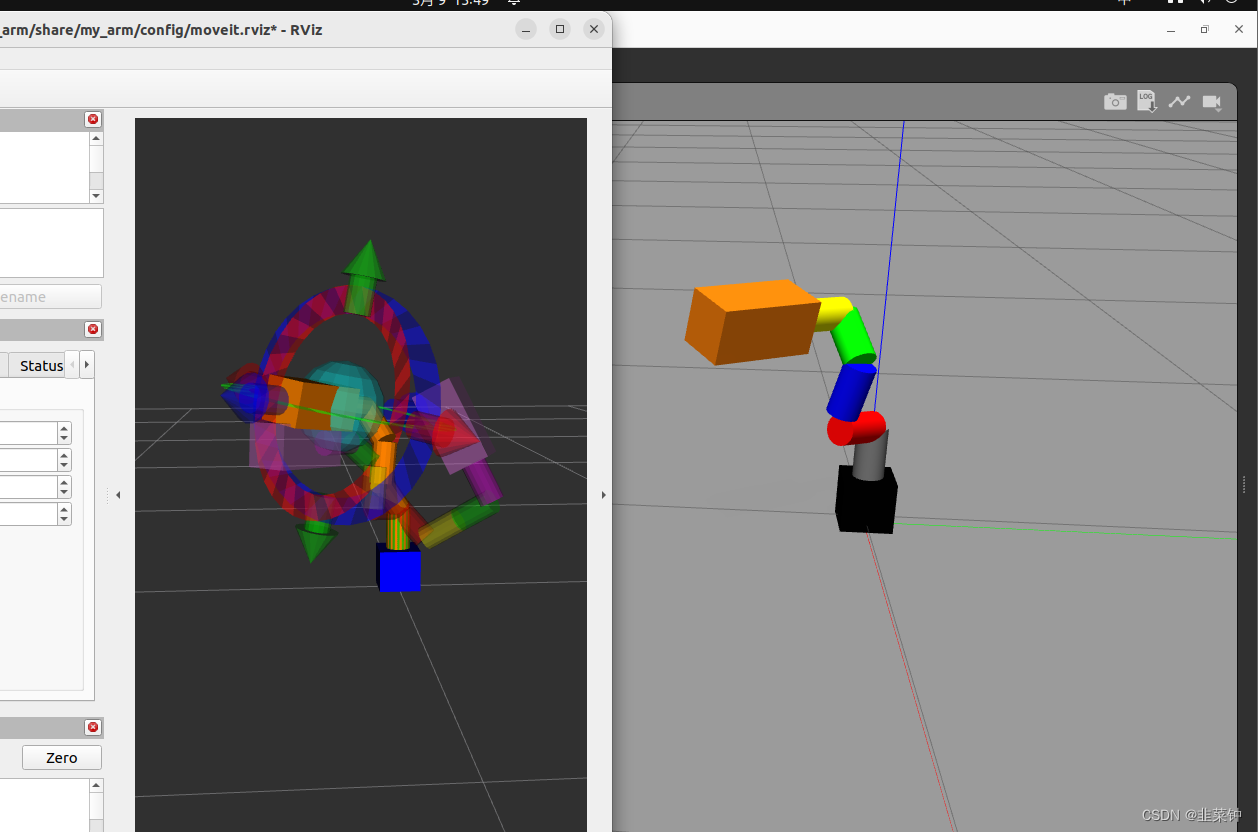 左侧是rviz2中的moveit组件的机械手,右侧是gazebo中的机械手。在moveit中进行路径规划并执行后,右侧gazebo中的机械手也就执行相应的动作。
左侧是rviz2中的moveit组件的机械手,右侧是gazebo中的机械手。在moveit中进行路径规划并执行后,右侧gazebo中的机械手也就执行相应的动作。
1.软件的安装
1.1.Ubuntu 22.04
据说win10下也可以装ROS2,但是十分折腾,还是在Ubuntu下安装方便一些,Ubuntu22.04才有humble版本的ros2,Ubuntu20.04没有humble。
1.2.ROS2
按照鱼香ros的教程,在命令行中执行鱼香ROS的一键安装代码
wget http://fishros.com/install -O fishros && . fishros
然后选择安装ros,选择humble版本。
1.3.Gazebo
参考教程
只要执行两行就行
sudo apt install gazebo11
sudo apt install ros-humble-gazebo-*
1.4.MoveIt2
参考教程
MoveIt2可以选择自己编译源码安装,或者直接从二进制安装。
个人建议直接二进制安装,可以省很多事。
sudo apt install ros-humble-moveit
1.5.moveit-setup-assistant
这是一个配套moveit的配置助手,有了它就可以方便地进行很多初始化的工作。
sudo apt install ros-humble-moveit-setup-assistant
2.机械手urdf文件的编写
我们用urdf文件来描述我们的机械手的外观以及物理性能。这里为了简便,就只用了基本的圆柱、立方体了。追求美观的朋友,还可以用dae文件来描述机械手的外形。
文件six_arm.urdf
<?xml version="1.0"?>
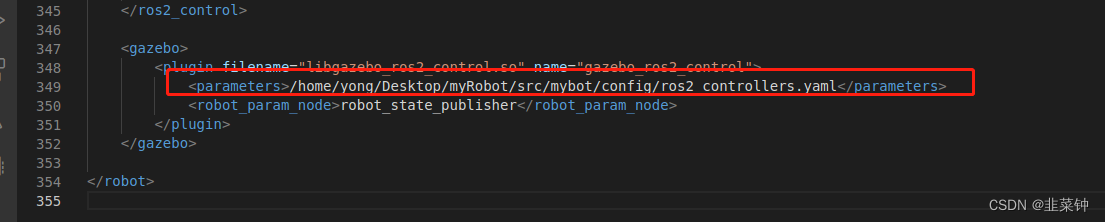
<robot name="six_arm"><!-- Base link --><link name="base_link"><visual><geometry><box size="0.1 0.1 0.1"/></geometry><origin rpy="0 0 0" xyz="0 0 0.05"/><material name="blue"><color rgba="0 0 1.0 1"/></material></visual><collision><geometry><box size="0.1 0.1 0.1"/></geometry><origin rpy="0 0 0" xyz="0 0 0.05"/></collision><inertial><mass value="10"/><inertia ixx="0" ixy="0" ixz="0" iyy="0" iyz="0" izz="0"/></inertial></link><!-- Link 1 --><link name="link1"><visual><geometry><cylinder length="0.1" radius="0.03"/></geometry><origin rpy="0 0 0" xyz="0 0 0.05"/><material name="green"><color rgba="0 0.8 0 1"/></material></visual><collision><geometry><cylinder length="0.1" radius="0.03"/></geometry><origin rpy="0 0 0" xyz="0 0 0.05"/></collision><inertial><mass value="0.2"/><inertia ixx="0" ixy="0" ixz="0" iyy="0" iyz="0" izz="0"/></inertial></link><!-- Joint 1: rotation around X-axis --><joint name="joint1" type="continuous"><parent link="base_link"/><child link="link1"/><axis xyz="0 0 1"/><origin xyz="0 0 0.1" rpy="0 0 0"/></joint><!-- Link 2 --><link name="link2"><visual><geometry><cylinder length="0.1" radius="0.03"/></geometry><origin rpy="0 0 0" xyz="0 0 0.05"/><material name="red"><color rgba="0.8 0 0 1"/></material></visual><collision><geometry><cylinder length="0.1" radius="0.03"/></geometry><origin rpy="0 0 0" xyz="0 0 0.05"/></collision><inertial><mass value="0.2"/><inertia ixx="0" ixy="0" ixz="0" iyy="0" iyz="0" izz="0"/></inertial></link><!-- Joint 2: rotation around Y-axis --><joint name="joint2" type="continuous"><parent link="link1"/><child link="link2"/><axis xyz="1 0 0"/><origin xyz="0 0 0.1"/></joint><!-- Link 3 --><link name="link3"><visual><geometry><cylinder length="0.1" radius="0.03"/></geometry><origin rpy="0 0 0" xyz="0 0 0.05"/><material name="yellow"><color rgba="0.8 0.8 0 1"/></material></visual><collision><geometry><cylinder length="0.1" radius="0.03"/></geometry><origin rpy="0 0 0" xyz="0 0 0.05"/></collision><inertial><mass value="0.2"/><inertia ixx="0" ixy="0" ixz="0" iyy="0" iyz="0" izz="0"/></inertial></link><!-- Joint 3: rotation around x-axis --><joint name="joint3" type="continuous"><parent link="link2"/><child link="link3"/><axis xyz="1 0 0"/><origin xyz="0 0 0.1"/></joint><!-- Link 4 --><link name="link4"><visual><geometry><cylinder length="0.1" radius="0.03"/></geometry><origin rpy="0 0 0" xyz="0 0 0.05"/><material name="green"><color rgba="0 0.8 0 1"/></material></visual><collision><geometry><cylinder length="0.1" radius="0.03"/></geometry><origin rpy="0 0 0" xyz="0 0 0.05"/></collision><inertial><mass value="0.2"/><inertia ixx="0" ixy="0" ixz="0" iyy="0" iyz="0" izz="0"/></inertial></link><!-- Joint 4: rotation around X-axis --><joint name="joint4" type="continuous"><parent link="link3"/><child link="link4"/><axis xyz="0 1 0"/><origin xyz="0 0 0.1"/></joint><!-- Link 5 --><link name="link5"><visual><geometry><cylinder length="0.1" radius="0.03"/></geometry><origin rpy="0 0 0" xyz="0 0 0.05"/><material name="purple"><color rgba="0.8 0 0.8 1"/></material></visual><collision><geometry><cylinder length="0.1" radius="0.03"/></geometry><origin rpy="0 0 0" xyz="0 0 0.05"/></collision><inertial><mass value="0.2"/><inertia ixx="0" ixy="0" ixz="0" iyy="0" iyz="0" izz="0"/></inertial></link><!-- Joint 5: rotation around Y-axis --><joint name="joint5" type="continuous"><parent link="link4"/><child link="link5"/><axis xyz="1 0 0"/><origin xyz="0 0 0.1"/></joint><!-- Link 6 --><link name="link6"><visual><geometry><box size="0.1 0.1 0.2"/></geometry><origin rpy="0 0 0" xyz="0 0 0.1"/><material name="pink"><color rgba="0.8 0.4 0.8 1"/></material></visual><collision><geometry><box size="0.1 0.1 0.2"/></geometry><origin rpy="0 0 0" xyz="0 0 0.1"/></collision><inertial><mass value="0.2"/><inertia ixx="0" ixy="0" ixz="0" iyy="0" iyz="0" izz="0"/></inertial></link><!-- Joint 6: rotation around Z-axis --><joint name="joint6" type="continuous"><parent link="link5"/><child link="link6"/><axis xyz="0 0 1"/><origin xyz="0 0 0.1"/></joint><!-- Used for fixing robot to Gazebo 'base_link' 将机械手的基座固定在世界坐标上--><link name="world"/><joint name="fixed" type="fixed"><parent link="world"/><child link="base_link"/></joint><gazebo reference="base_link"><material>Gazebo/Black</material><gravity>true</gravity><selfCollide>false</selfCollide></gazebo><gazebo reference="link1"><material>Gazebo/Gray</material><selfCollide>false</selfCollide></gazebo><gazebo reference="link2"><material>Gazebo/Red</material><selfCollide>false</selfCollide></gazebo><gazebo reference="link3"><material>Gazebo/Blue</material></gazebo><gazebo reference="link4"><material>Gazebo/Green</material></gazebo><gazebo reference="link5"><material>Gazebo/Yellow</material></gazebo><gazebo reference="link6"><material>Gazebo/Orange</material></gazebo><!-- 在有需要时注释这个ros2_control节点--><ros2_control name="GazeboSystem" type="system"><hardware><plugin>gazebo_ros2_control/GazeboSystem</plugin></hardware><joint name="joint1"><command_interface name="position"><param name="min">-1</param><param name="max">1</param></command_interface><state_interface name="position"><param name="initial_value">0.0</param></state_interface><state_interface name="velocity"/></joint><joint name="joint2"><command_interface name="position"><param name="min">-1</param><param name="max">1</param></command_interface><state_interface name="position"><param name="initial_value">0.0</param></state_interface><state_interface name="velocity"/></joint><joint name="joint3"><command_interface name="position"><param name="min">-1</param><param name="max">1</param></command_interface><state_interface name="position"><param name="initial_value">0.0</param></state_interface><state_interface name="velocity"/></joint><joint name="joint4"><command_interface name="position"><param name="min">-1</param><param name="max">1</param></command_interface><state_interface name="position"><param name="initial_value">0.0</param></state_interface><state_interface name="velocity"/></joint><joint name="joint5"><command_interface name="position"><param name="min">-1</param><param name="max">1</param></command_interface><state_interface name="position"><param name="initial_value">0.0</param></state_interface><state_interface name="velocity"/></joint><joint name="joint6"><command_interface name="position"><param name="min">-1</param><param name="max">1</param></command_interface><state_interface name="position"><param name="initial_value">0.0</param></state_interface><state_interface name="velocity"/></joint></ros2_control><gazebo><plugin filename="libgazebo_ros2_control.so" name="gazebo_ros2_control"><parameters>/home/yong/Desktop/myRobot/src/mybot/config/ros2_controllers.yaml</parameters><robot_param_node>robot_state_publisher</robot_param_node></plugin></gazebo></robot>
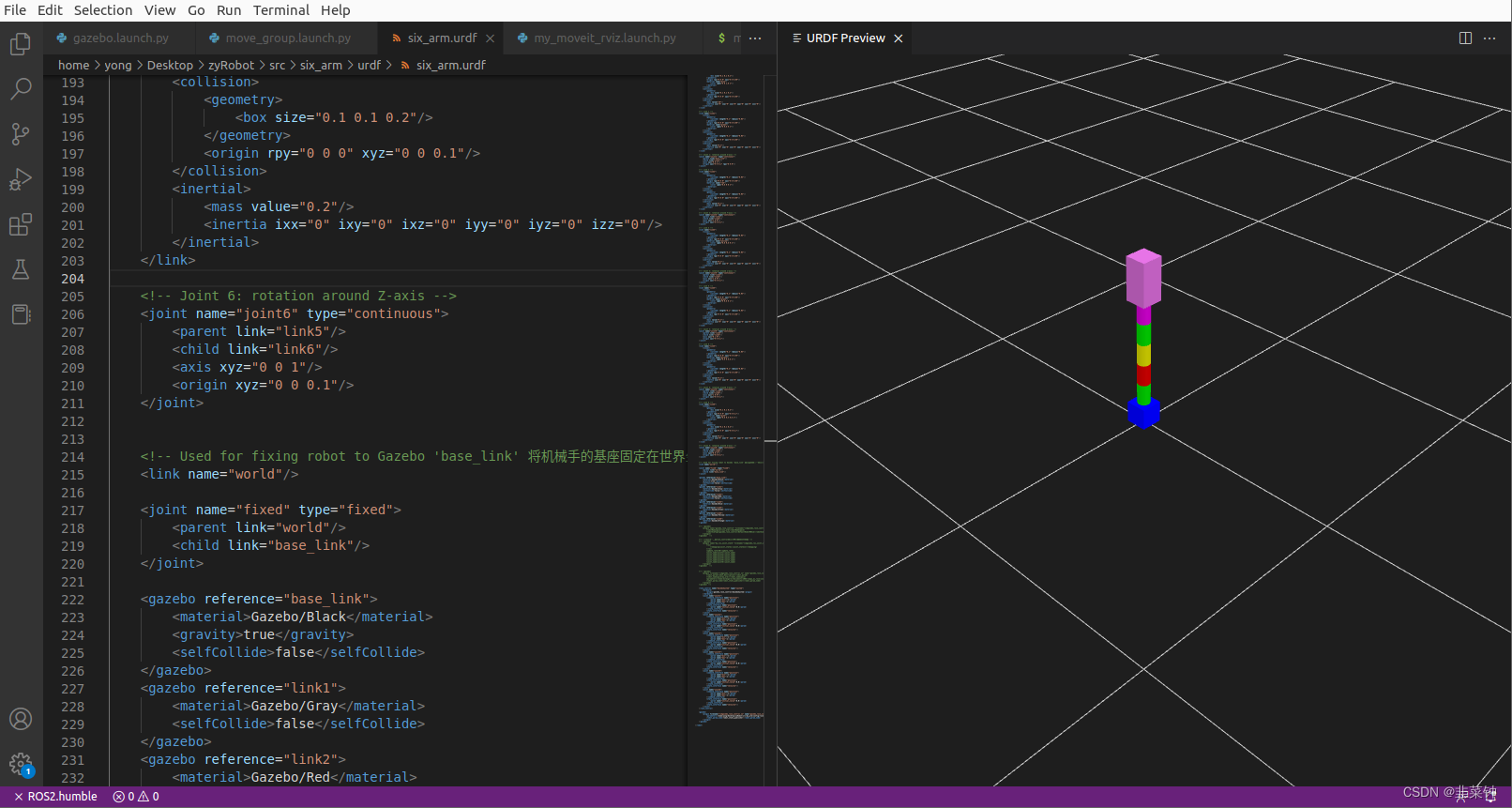
2.1.机械手的外型
可以在vscode中打开这个文件然后用插件就可以看到这个机械手的外形,关于urdf语法的详细介绍,可以看这里。
2.2.机械手link的inertial的设置
我这里偷懒,随便设置的。真正设置的话,有公式,自己可以参考一下。
urdf里面的link必须要有旋转惯量矩阵‘intertial’的,否则在gazebo里面导入模型urdf时,会报下面的错。
[gazebo-1] [Err] [Model.cc:123] Error Code 23 Msg: FrameAttachedToGraph error, Non-LINK vertex with name [model] is disconnected; it should have 1 outgoing edge in MODEL attached_to graph.
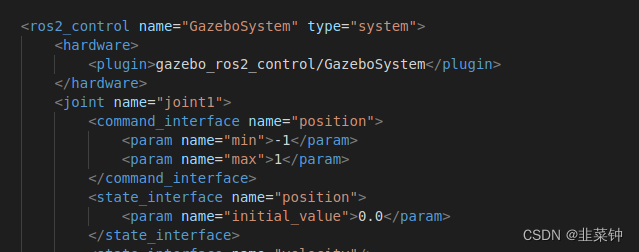
2.3.ros2_control插件
该插件是在gazbo导入该模型文件时,创建与Ros2交互的接口。

上面的ros2_controllers.yaml文件是在下一步创建出来的,先不用管。
同时,ros2_control这个节点下的内容也是要和ros2_controllers.yaml对应的,也可以先不管。
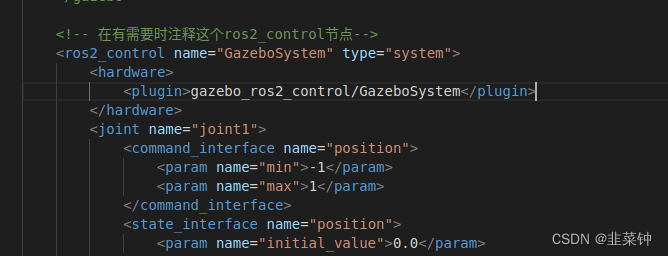
这个节点在开始阶段先注释掉,否则会与通过moveit_setup_assistant创建的一个fake_systemde ros2_control冲突。
3.机械手与MoveIt的关联
通过前面的操作,我们拥有了一个描述机械手的文件 six_arm.urdf,接下来我们利用该文件创建一个可以利用MoveIt进行路径规划的“工程”。
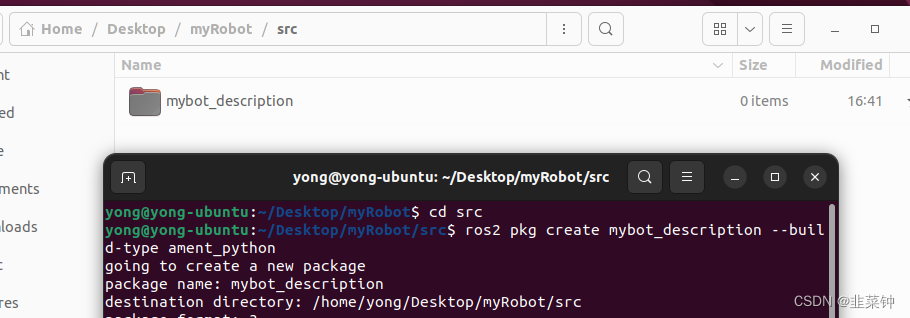
3.1.建立一个文件夹myRobot,然后再在此文件夹中建立一个src文件夹
3.2.然后进入src文件夹路径,创建包
ros2 pkg create mybot_description --build-type ament_python
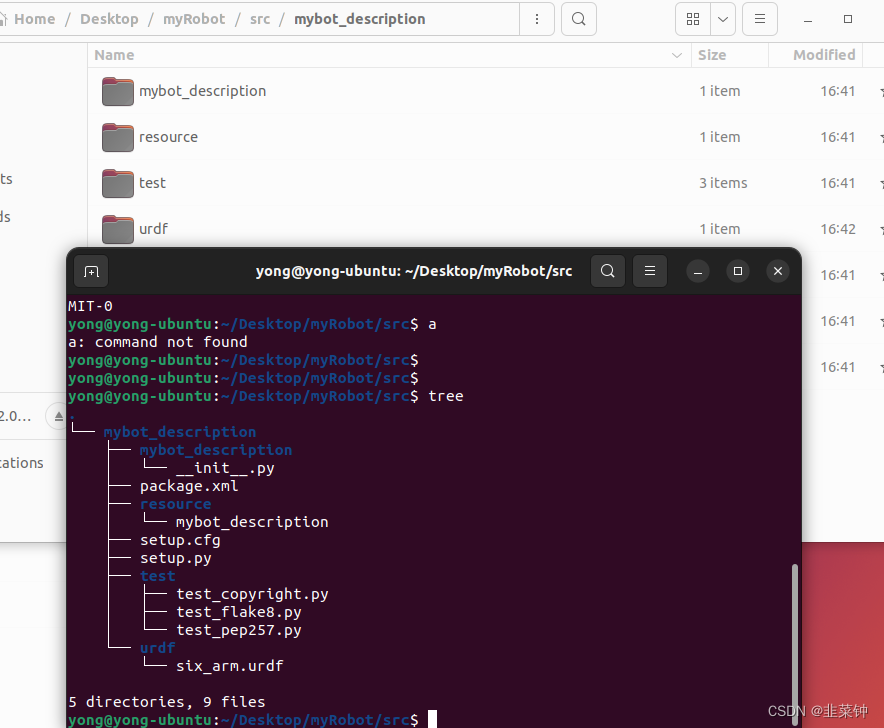
3.3.在 src/mybot_description文件夹下,创建urdf文件夹,然后把six_arm.urdf放进去,如下图所示。
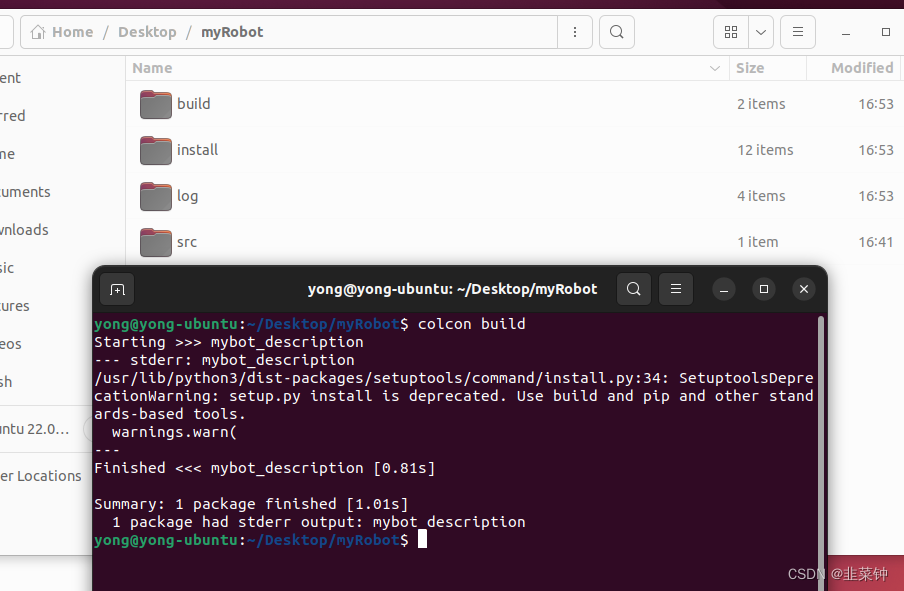
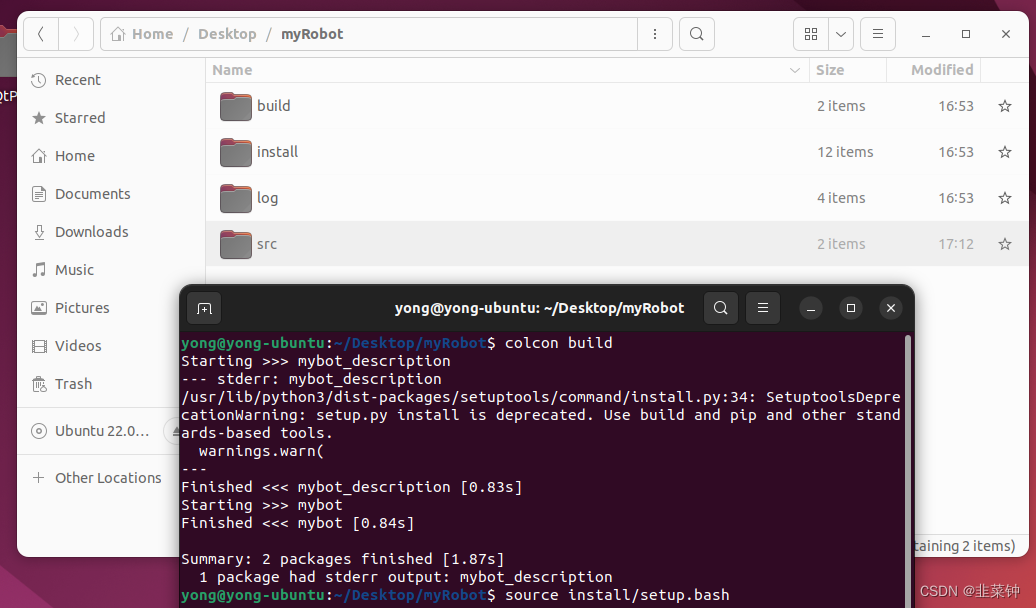
3.4.返回myRobot目录,然后编译一下
colcon build
3.5.source一下
source的目的是为了把我们创建的 mybot_description项目暴露给控制台,然后让后续的moveit_setup_assistant可以找到对应的urdf文件
source install/setup.bash
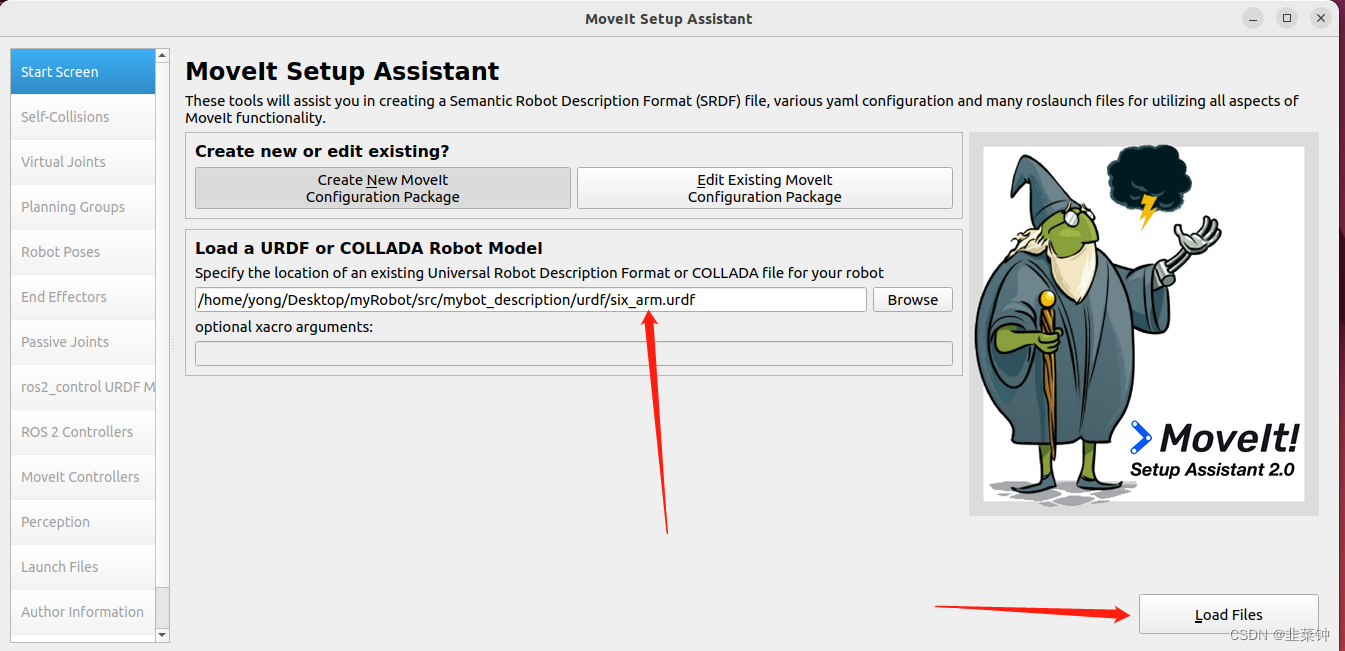
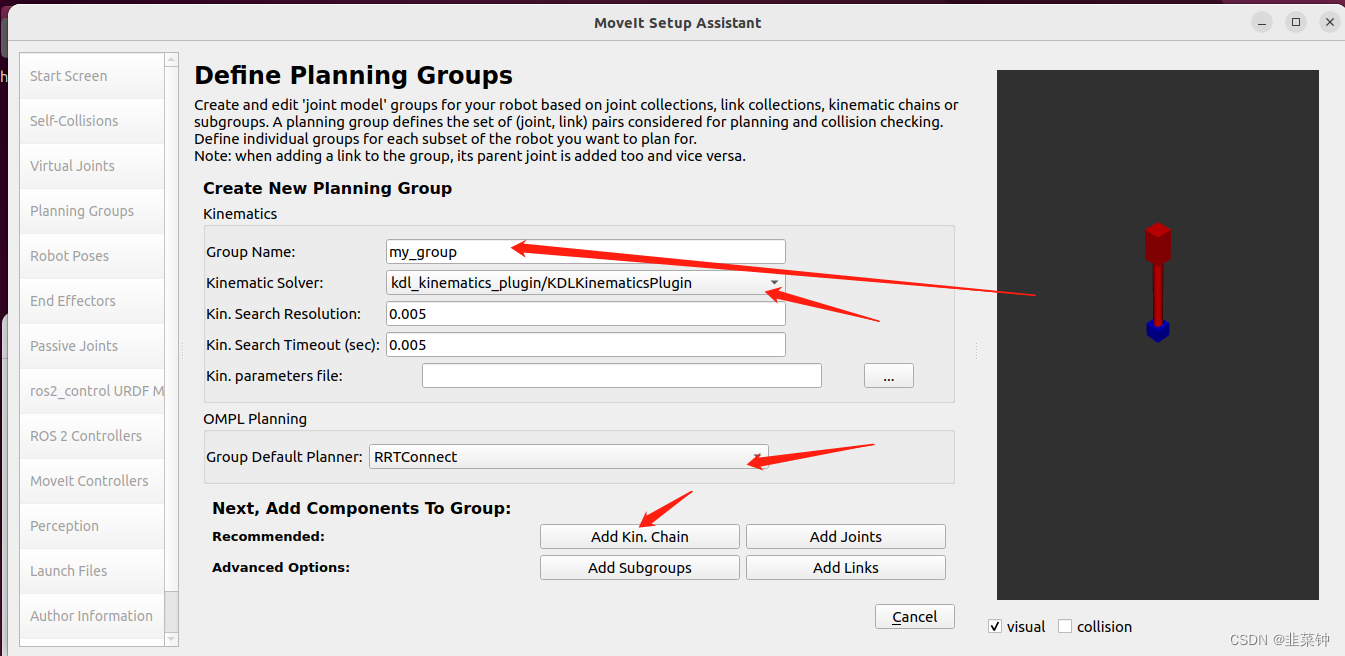
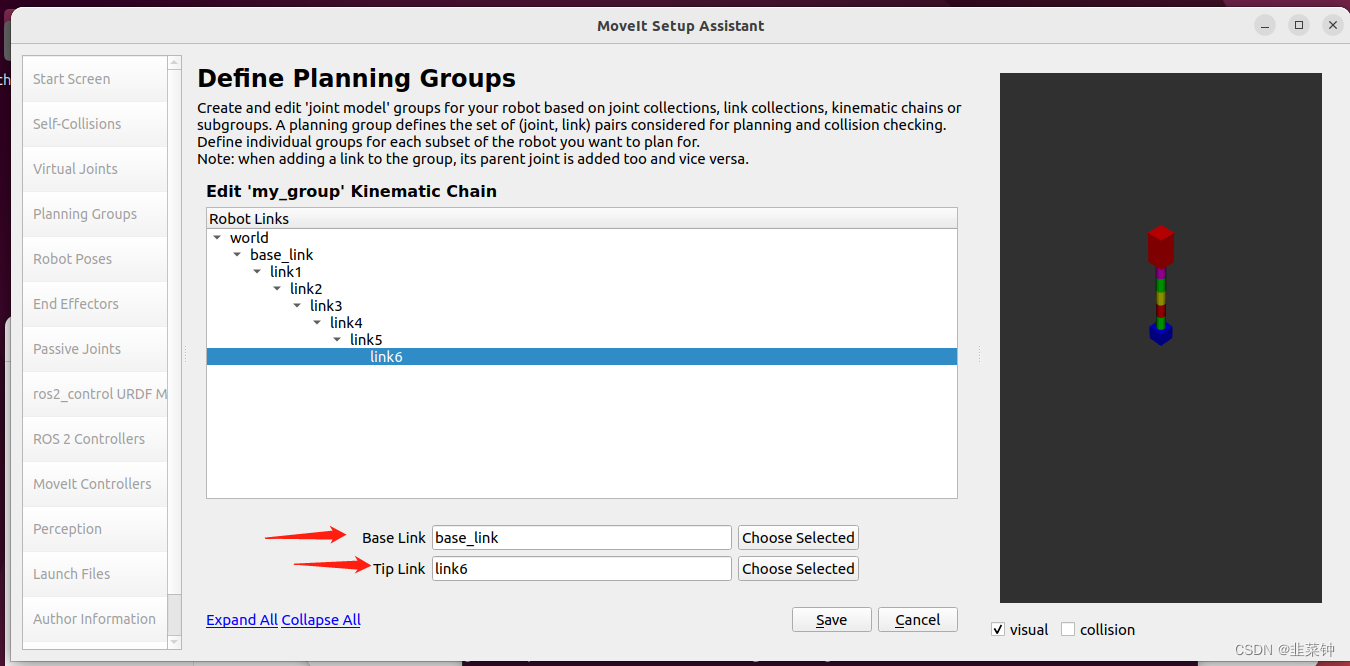
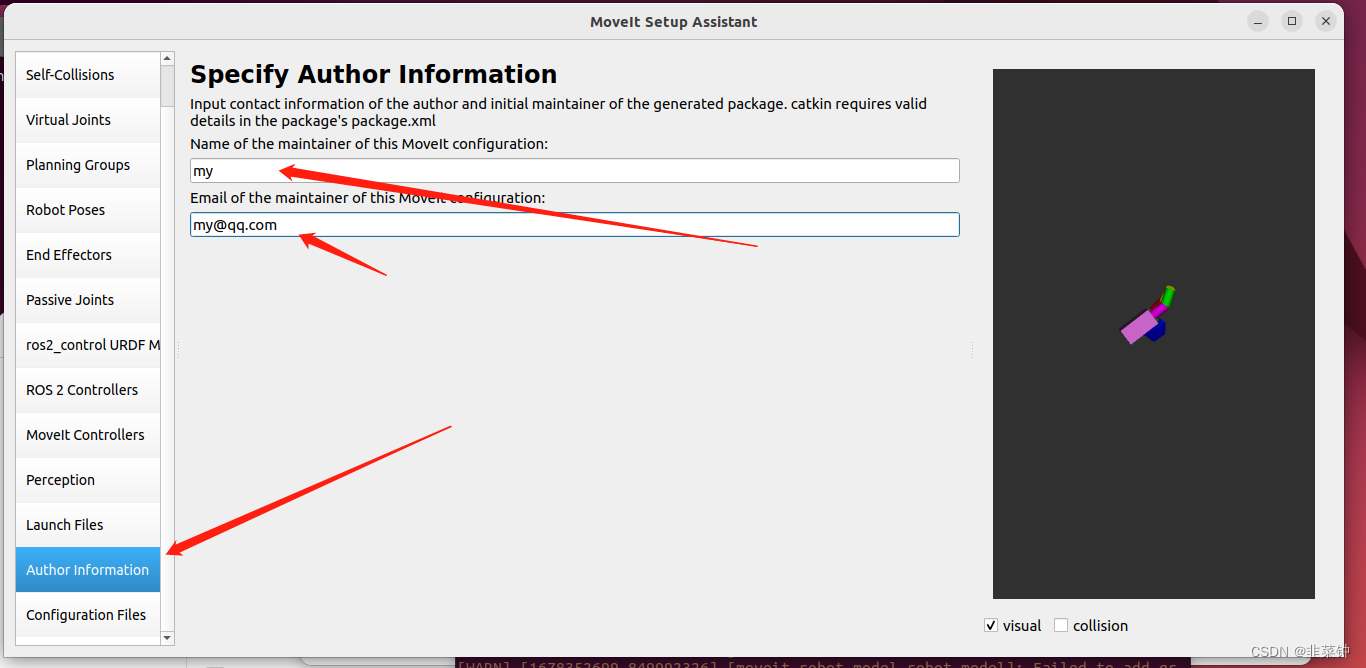
3.6.利用moveit_setup_assistant创建项目
参考教程,启动moveit_setup_assistant
ros2 run moveit_setup_assistant moveit_setup_assistant
记得选择src里面的urdf,然后后面的就按照教程来干了。
注意:group name设置my_group
一些关键的设置看下列图
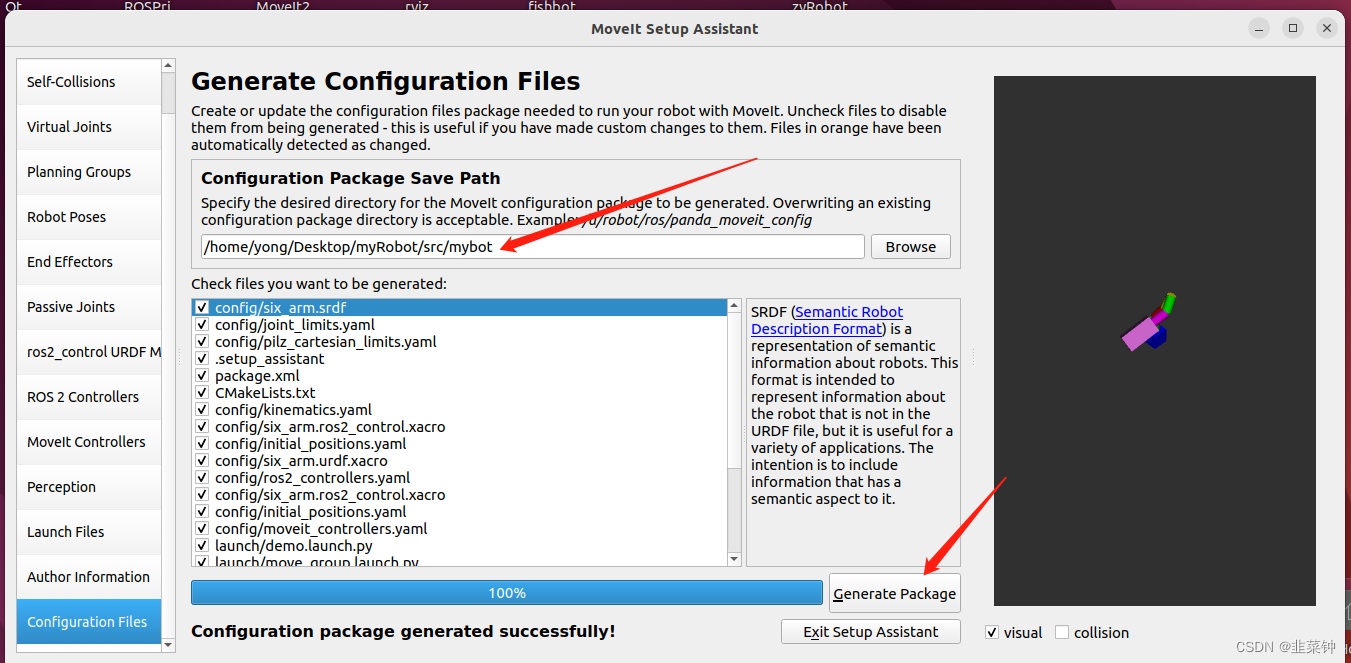
 在最后一步保存时,在我们前面创建的src文件夹里面,创建一个mybot文件夹
在最后一步保存时,在我们前面创建的src文件夹里面,创建一个mybot文件夹
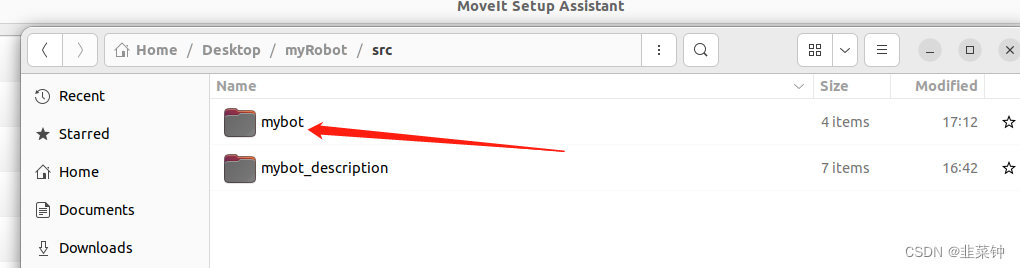 然后在助手里选择该路径,点击generat package
然后在助手里选择该路径,点击generat package
3.7.编译试运行
此时,退出助手,并执行编译;
编译完成后,重新source一下。
colcon build
source install/setup.bash
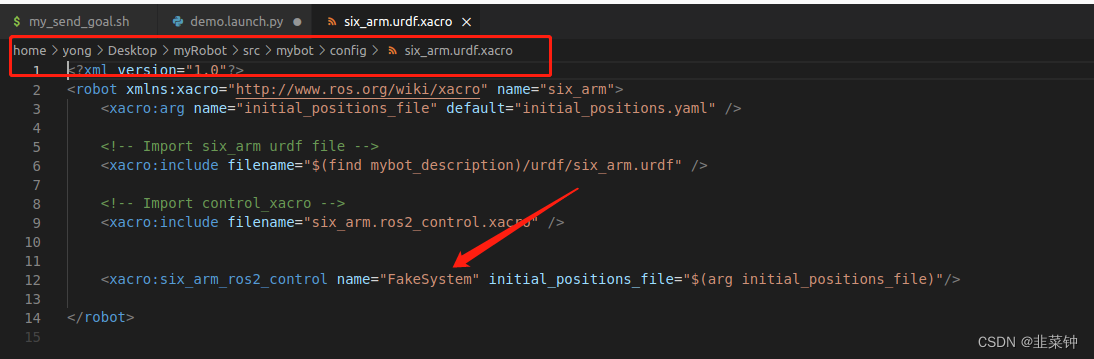
记得把前面的urdf文件里面的这个路径改成你自己的。
 这段注释一下,否则会有冲突。到后面就可以取消注释,但是目前要注释掉。
这段注释一下,否则会有冲突。到后面就可以取消注释,但是目前要注释掉。
每次修改完文件后,记得都要 colcon build一下。
试着执行
ros2 launch mybot demo.launch.py
会报错
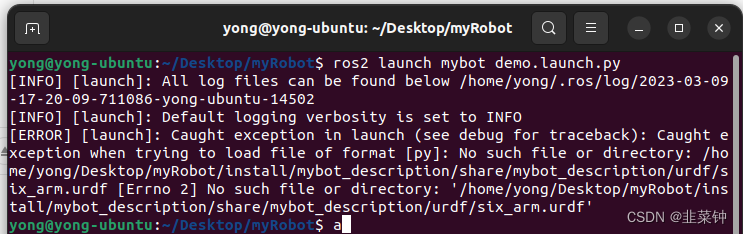
这是因为在编译时没有把urdf文件拷贝到install目录中,因此我们需要修改一下 src/mybot_description/setup.py
修改三处地方,将其修改成类似下面这样
修改完之后就可以自动在编译时复制到install目录了,具体原理可以自己按照代码推测一下
from setuptools import setupfrom glob import glob #这里
import os #这里package_name = 'mybot_description'setup(name=package_name,version='0.0.0',packages=[package_name],data_files=[('share/ament_index/resource_index/packages',['resource/' + package_name]),('share/' + package_name, ['package.xml']),(os.path.join('share', package_name, 'urdf'), glob('urdf/**')), #这里],install_requires=['setuptools'],zip_safe=True,maintainer='yong',maintainer_email='yong@todo.todo',description='TODO: Package description',license='TODO: License declaration',tests_require=['pytest'],entry_points={'console_scripts': [],},
)
colcon build一下。
然后启动
ros2 launch mybot demo.launch.py
然后就可以愉快地玩耍了。
假如报其他错误请查看此处。
4.机械手与Gazebo的关联
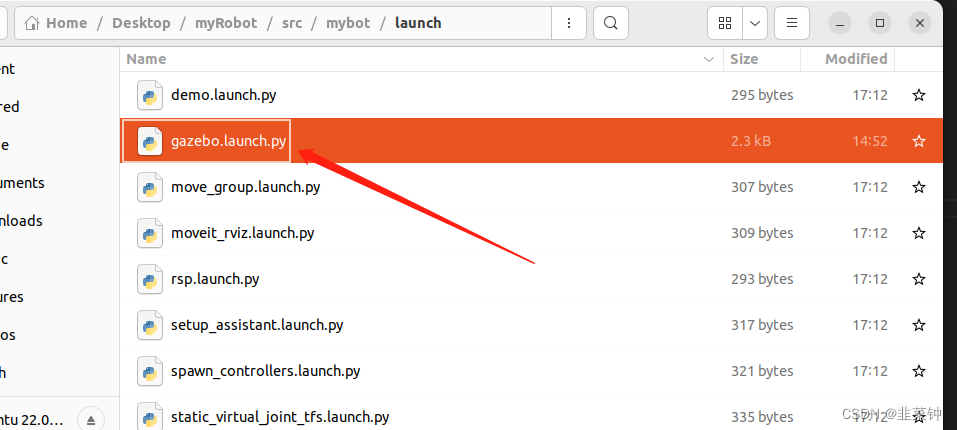
4.1.在 src/mybot/launch 路径下,新建一个文件: gazebo.launch.py
 其内容如下
其内容如下
import os
from launch import LaunchDescription
from launch.actions import ExecuteProcess, RegisterEventHandler
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageSharefrom launch.event_handlers import OnProcessExitdef generate_launch_description():robot_name_in_model = 'six_arm'package_name = 'mybot_description'urdf_name = "six_arm.urdf"pkg_share = FindPackageShare(package=package_name).find(package_name) urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}')# Start Gazebo serverstart_gazebo_cmd = ExecuteProcess(cmd=['gazebo', '--verbose','-s', 'libgazebo_ros_init.so', '-s', 'libgazebo_ros_factory.so'],output='screen')# Launch the robotspawn_entity_cmd = Node(package='gazebo_ros', executable='spawn_entity.py',arguments=['-entity', robot_name_in_model, '-file', urdf_model_path ], output='screen')node_robot_state_publisher = Node(package='robot_state_publisher',executable='robot_state_publisher',arguments=[urdf_model_path],parameters=[{'use_sim_time': True}],output='screen')# 关节状态发布器load_joint_state_controller = ExecuteProcess(cmd=['ros2', 'control', 'load_controller', '--set-state', 'active','joint_state_broadcaster'],output='screen')# 路径执行控制器load_joint_trajectory_controller = ExecuteProcess(cmd=['ros2', 'control', 'load_controller', '--set-state', 'active','my_group_controller'],output='screen')close_evt1 = RegisterEventHandler( event_handler=OnProcessExit(target_action=spawn_entity_cmd,on_exit=[load_joint_state_controller],))close_evt2 = RegisterEventHandler(event_handler=OnProcessExit(target_action=load_joint_state_controller,on_exit=[load_joint_trajectory_controller],))ld = LaunchDescription()ld.add_entity(close_evt1)ld.add_entity(close_evt2)ld.add_action(start_gazebo_cmd)ld.add_action(node_robot_state_publisher)ld.add_action(spawn_entity_cmd)return ld
4.2.将 src/mybot_description/urdf/six_arm.urdf 的内容修改一下
将这一段取消注释。
4.3.编译、运行
每次修改完文件后,记得都要 colcon build一下。
colcon build一下。
然后启动
ros2 launch mybot gazebo.launch.py
然后就可以愉快地玩耍了。

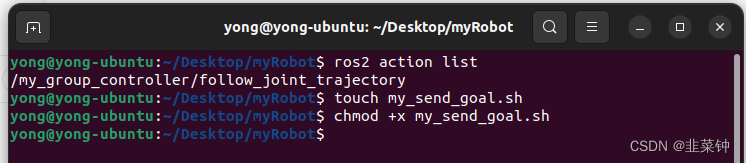
4.4. action send_goal 测试
目前运行的这这个gazebo例子已经开放了一个action接口,通过这个接口,我们就可以直接发送一个路径让其执行。

我们可以手写一个轨迹,然后让其执行
新建一个my_send_goal.sh文件,然后通过 chmod +x 使其具有执行权限
文件内容如下:
ros2 action send_goal /my_group_controller/follow_joint_trajectory control_msgs/action/FollowJointTrajectory "{trajectory: {joint_names: [joint1, joint2, joint3, joint4, joint5, joint6],points: [{ positions: [0.1, 0.1, 0.1, 0.1, 0.1, 0.1], time_from_start: { sec: 0, nanosec: 500 } },{ positions: [0.2, 0.5, 0.2 ,0.2, 0.2, 0.2], time_from_start: { sec: 5, nanosec: 500 } },{ positions: [0.3, 0.3, 0.7, -0.5, 0.3, 0.3], time_from_start: { sec: 7, nanosec: 500 } },{ positions: [0.4, 0.4, 0.9, 0.4, 0.4, 0.4], time_from_start: { sec: 8, nanosec: 500 } }]}
}"
然后在控台里面执行
./my_send_goal.sh
接下来可以看到gazebo中的机械手按照我们设定的轨迹进行运动了。
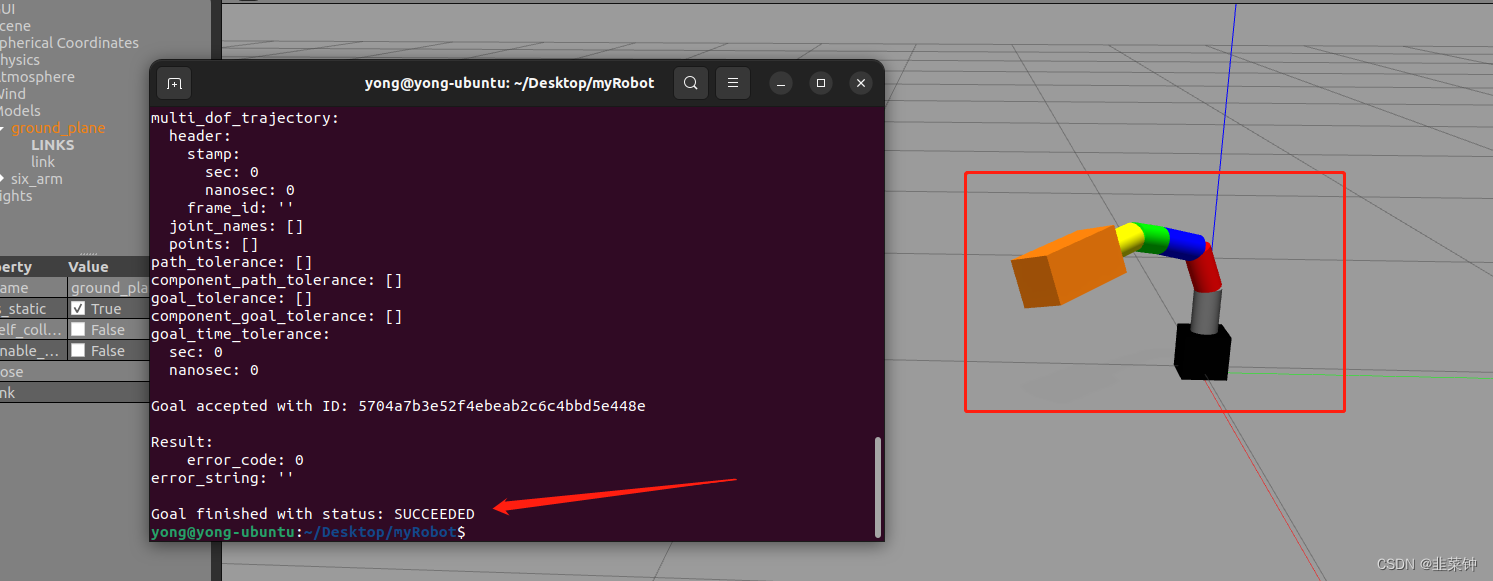 可以尝试改变一下my_send_goal.sh 的内容,然后推测一下各个参数的意义。
可以尝试改变一下my_send_goal.sh 的内容,然后推测一下各个参数的意义。
5.MoveIt与Gazebo的关联
moveit提供了路径规划接口,gazebo提供了执行接口,因此只需要将他们连起来就实现了路径规划仿真了。
5.1.原理分析
在前面通过moveit_setup_assistant创建的包中,之所以可以进行路径规划并执行,是因为他既启动了moveit的组件,也启动了一个FakeSystem节点,该节点代替了实际的机械手反馈moveit的路径规划(提供action给moveit连接)。
从下图可以看出,当我们执行demo时,有好几个节点启动了。
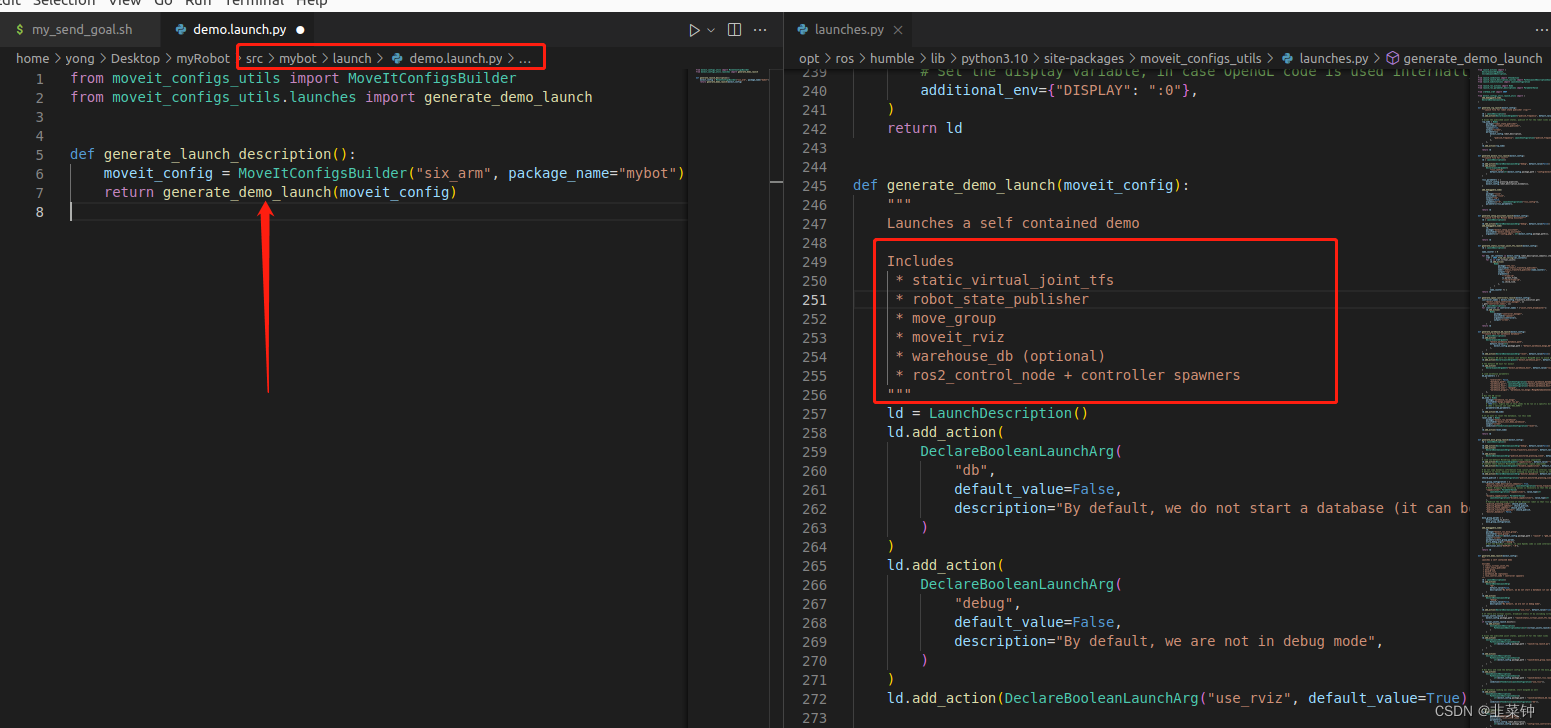
但是假如我们需要将FakeSystem节点替换成gazebo的节点,就可以通过只启动需要的几个节点,然后不启动FakeSystem就行。
5.2.launch文件编写
按照5.1的分析,我们可以在src/mybot/launch下新建一个文件my_moveit_rviz.launch.py,
 文件内容为
文件内容为
from moveit_configs_utils import MoveItConfigsBuilder
from moveit_configs_utils.launches import generate_moveit_rviz_launchfrom launch import LaunchDescription
from launch.actions import (DeclareLaunchArgument,IncludeLaunchDescription,
)
from moveit_configs_utils.launch_utils import (add_debuggable_node,DeclareBooleanLaunchArg,
)
from launch.substitutions import LaunchConfiguration
from launch_ros.parameter_descriptions import ParameterValuedef generate_launch_description():moveit_config = MoveItConfigsBuilder("six_arm", package_name="mybot_description").to_moveit_configs()ld = LaunchDescription()# 启动move_groupmy_generate_move_group_launch(ld, moveit_config)# 启动rvizmy_generate_moveit_rviz_launch(ld, moveit_config)return lddef my_generate_move_group_launch(ld, moveit_config):ld.add_action(DeclareBooleanLaunchArg("debug", default_value=False))ld.add_action(DeclareBooleanLaunchArg("allow_trajectory_execution", default_value=True))ld.add_action(DeclareBooleanLaunchArg("publish_monitored_planning_scene", default_value=True))# load non-default MoveGroup capabilities (space separated)ld.add_action(DeclareLaunchArgument("capabilities", default_value=""))# inhibit these default MoveGroup capabilities (space separated)ld.add_action(DeclareLaunchArgument("disable_capabilities", default_value=""))# do not copy dynamics information from /joint_states to internal robot monitoring# default to false, because almost nothing in move_group relies on this informationld.add_action(DeclareBooleanLaunchArg("monitor_dynamics", default_value=False))should_publish = LaunchConfiguration("publish_monitored_planning_scene")move_group_configuration = {"publish_robot_description_semantic": True,"allow_trajectory_execution": LaunchConfiguration("allow_trajectory_execution"),# Note: Wrapping the following values is necessary so that the parameter value can be the empty string"capabilities": ParameterValue(LaunchConfiguration("capabilities"), value_type=str),"disable_capabilities": ParameterValue(LaunchConfiguration("disable_capabilities"), value_type=str),# Publish the planning scene of the physical robot so that rviz plugin can know actual robot"publish_planning_scene": should_publish,"publish_geometry_updates": should_publish,"publish_state_updates": should_publish,"publish_transforms_updates": should_publish,"monitor_dynamics": False,}move_group_params = [moveit_config.to_dict(),move_group_configuration,]move_group_params.append({"use_sim_time": True})add_debuggable_node(ld,package="moveit_ros_move_group",executable="move_group",commands_file=str(moveit_config.package_path / "launch" / "gdb_settings.gdb"),output="screen",parameters=move_group_params,extra_debug_args=["--debug"],# Set the display variable, in case OpenGL code is used internallyadditional_env={"DISPLAY": ":0"},)return lddef my_generate_moveit_rviz_launch(ld, moveit_config):"""Launch file for rviz"""ld.add_action(DeclareBooleanLaunchArg("debug", default_value=False))ld.add_action(DeclareLaunchArgument("rviz_config",default_value=str(moveit_config.package_path / "config/moveit.rviz"),))rviz_parameters = [moveit_config.planning_pipelines,moveit_config.robot_description_kinematics,]rviz_parameters.append({"use_sim_time": True})add_debuggable_node(ld,package="rviz2",executable="rviz2",output="log",respawn=False,arguments=["-d", LaunchConfiguration("rviz_config")],parameters=rviz_parameters,)return ld
在文件中,我们主要启动了两个节点:move_group、rviz。
这里面这还涉及到一个use_sim_time的问题,因此才这样重写。参考这里
然后colcon build一下。
5.2.执行测试
分别打开两个控制台,然后分别执行以下命令
ros2 launch mybot gazebo.launch.py
ros2 launch mybot my_moveit_rviz.launch.py
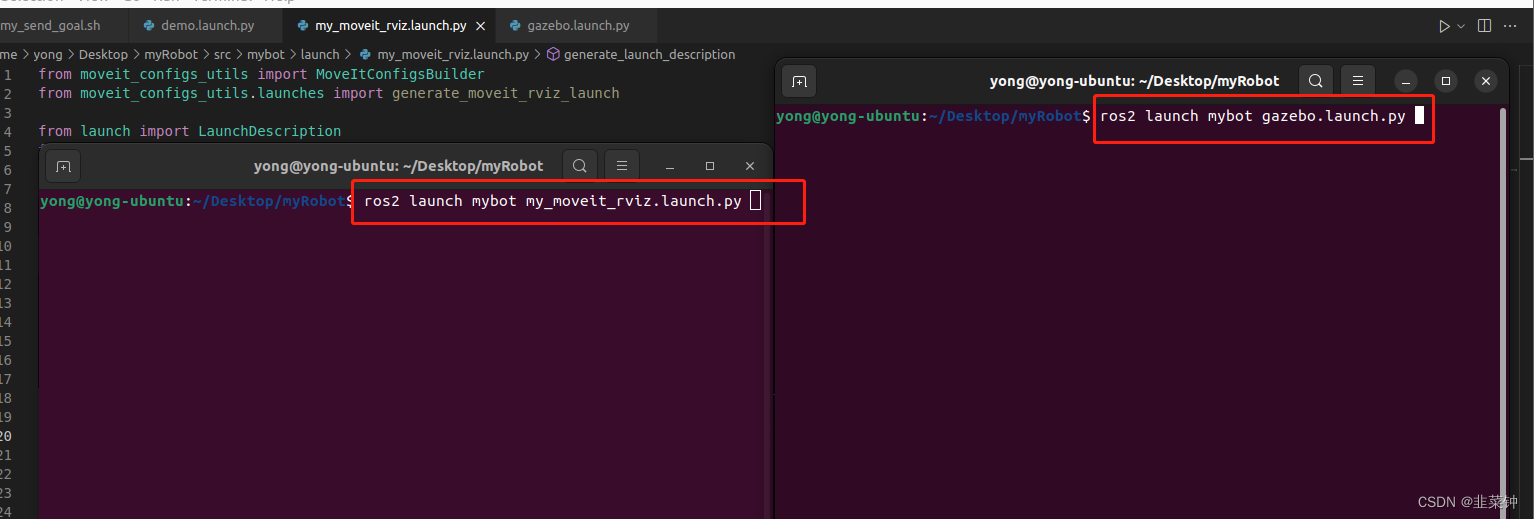
注意是要先运行gazebo(ros2 launch mybot gazebo.launch.py),然后再运行moveit(ros2 launch mybot my_moveit_rviz.launch.py )
在moveit里面规划路径、然后执行。
在gazebo就可以看到模型动了起来。
6.总结
目前只是通过大致的操作完成了moveit控制gazebo里面的机械手,是偏操作方面的,原理可以粗略地理解成action的通讯。至于更加详细以及深入的教程,就等各位大佬来完成了。
相关文章:
在ROS2中,通过MoveIt2控制Gazebo中的自定义机械手
目前的空余时间主要都在研究ROS2,最终目的是控制自己用舵机组装的机械手。 由于种种原因,先控制Gazebo的自定义机械手。 先看看目前的成果 左侧是rviz2中的moveit组件的机械手,右侧是gazebo中的机械手。在moveit中进行路径规划并执行后&#…...

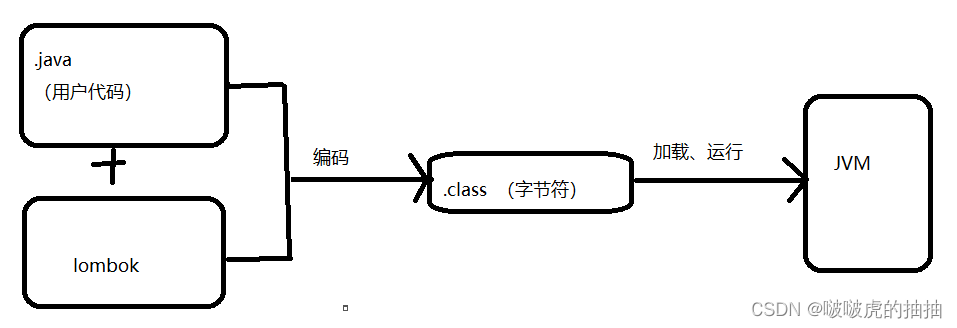
Java-线程池 原子性 类
Java-线程池 原子性 类线程池构造方法调用Executors静态方法创建调用方法直接创建线程池对象原子性volatile-问题出现原因:volatile解决原子性AtomicInteger的常用方法悲观锁和乐观锁synchronized(悲)和CAS(乐)的区别并发工具类Hashtable集合ConcurrentHashMap原理:CountDownLa…...
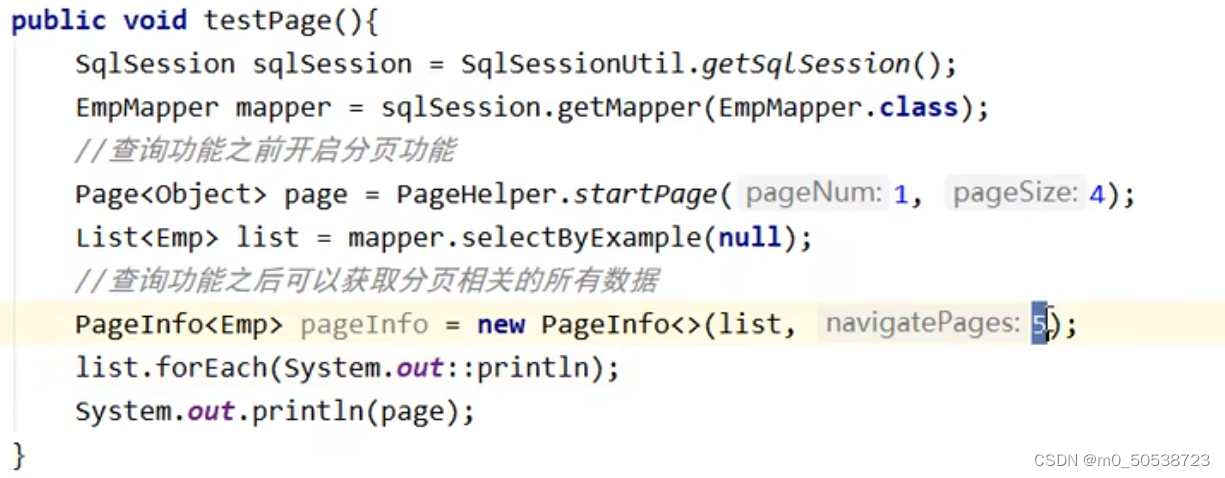
力扣sql简单篇练习(二十五)
力扣sql简单篇练习(二十五) 1 无效的推文 1.1 题目内容 1.1.1 基本题目信息 1.1.2 示例输入输出 1.2 示例sql语句 # Write your MySQL query statement below SELECT tweet_id FROM Tweets WHERE CHAR_LENGTH(content)>151.3 运行截图 2 求关注者的数量 2.1 基本题目内…...
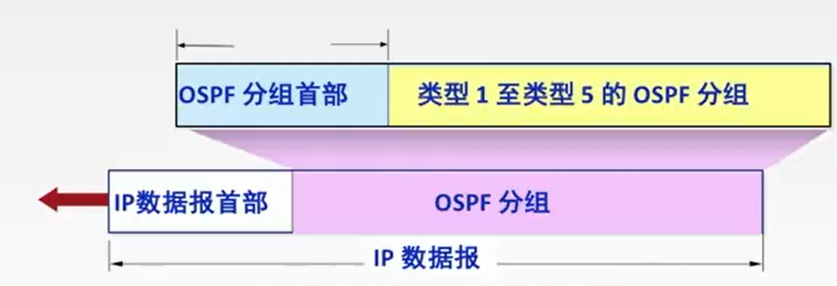
计算机网络:OSPF协议和链路状态算法
OSPF协议 开放最短路经优先OSPF协议是基于最短路径算法SPF,其主要特征就是使用分布式的链路状态协议OSPF协议的特点: 1.使用泛洪法向自治系统中的所有路由器发送信息,即路由器通过输出端口向所有相邻的路由器发送信息,而每一个相邻的路由器又…...

利用表驱动法+策略模式优化switch-case
1.前言 我有一个需求:有四个系统需要处理字段,一开始利用switch-case进行区分编码,后期字段处理越来越多,导致switch-case代码冗余,不太好,然后想通过java单继承多实现的性质进行优化。 2.实现 2.1定义S…...
SpringBoot创建和使用
目录 什么是SpringBoot SpringBoot的优点 SpringBoot项目的创建 1、使用idea创建 2、项目目录介绍和运行 Spring Boot配置文件 1、配置文件 2、配置文件的格式 3、properties 3.1、properties基本语法 3.2、读取配置文件 3.3、缺点 4、yml 4.1、优点 4.2、yml基本…...

which、whereis、locate文件查找命令
Linux下查找文件的命令有which、whereis、locate和find,find命令因要遍历文件系统,导致速度较慢,而且还会影响系统性能,而且命令选项较多,就单独放一篇介绍,可参见find命令——根据路径和条件搜索指定文件_…...
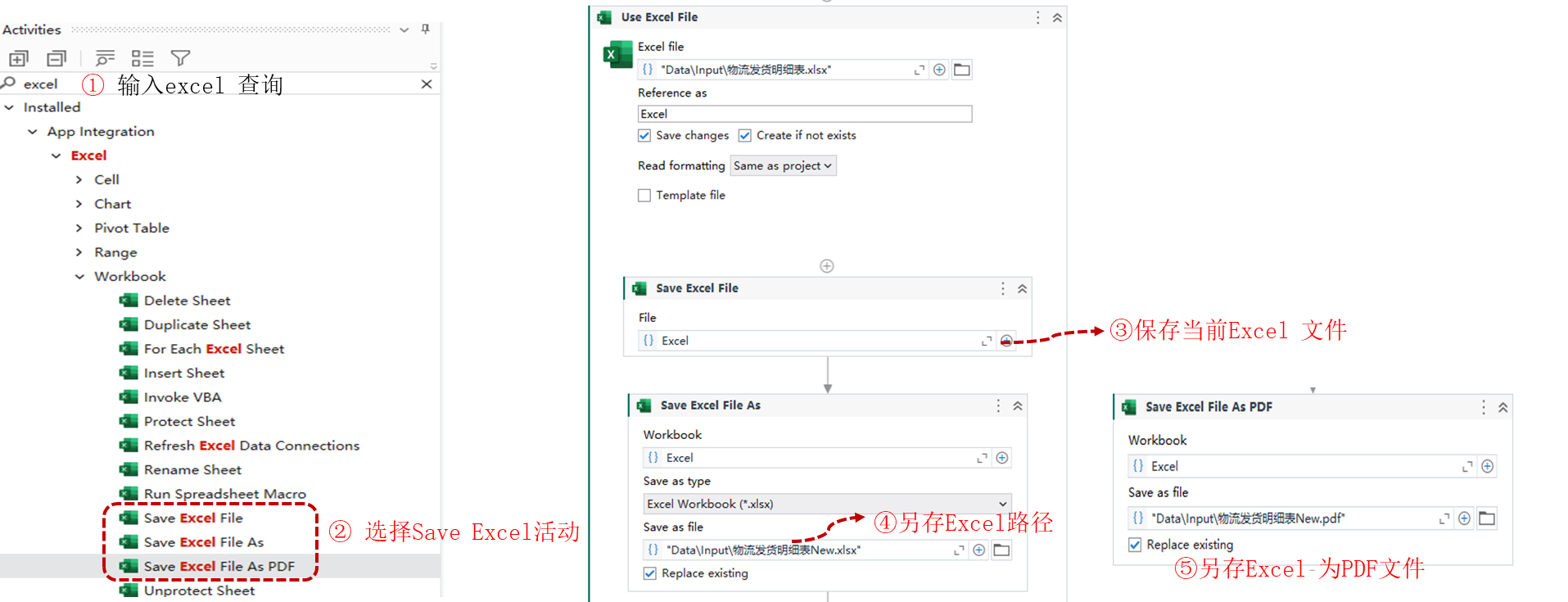
Uipath Excel 自动化系列14-SaveExcelFile(保存Excel)
活动描述 SaveExcelFile 保存Excel:保存工作簿,在修改 Excel 文件的用户界面自动化活动之后使用此活动,以保存对文件的更改 SaveExcelFile As 另存Excel : 将workbook 另存为文件 SaveExcelFile As PDF :将Excel 另存为PDF文件。该三个活…...
MyBatis学习
MyBatis优点 轻量级,性能出色 SQL 和 Java 编码分开,功能边界清晰。Java代码专注业务、SQL语句专注数据 开发效率稍逊于HIbernate,但是完全能够接受 补充:POJO 一:什么是POJO POJO的名称有多种,pure old…...
)
高速PCB设计指南系列(二)
第三篇 高速PCB设计 (一)、电子系统设计所面临的挑战 随着系统设计复杂性和集成度的大规模提高,电子系统设计师们正在从事100MHZ以上的电路设计,总线的工作频率也已经达到或者超过50MHZ,有的甚至超过100MHZ。目前…...

uniapp项目打包上线流程
平台:h5小程序app (安卓)小程序打包上线流程第一步:登录小程序公众平台第二步:hbuilderx打包小程序1.在mainfest.json文件中进行相关配置2.需要将项目中的网络请求改为https协议做为生产环境(配置项目的环境…...
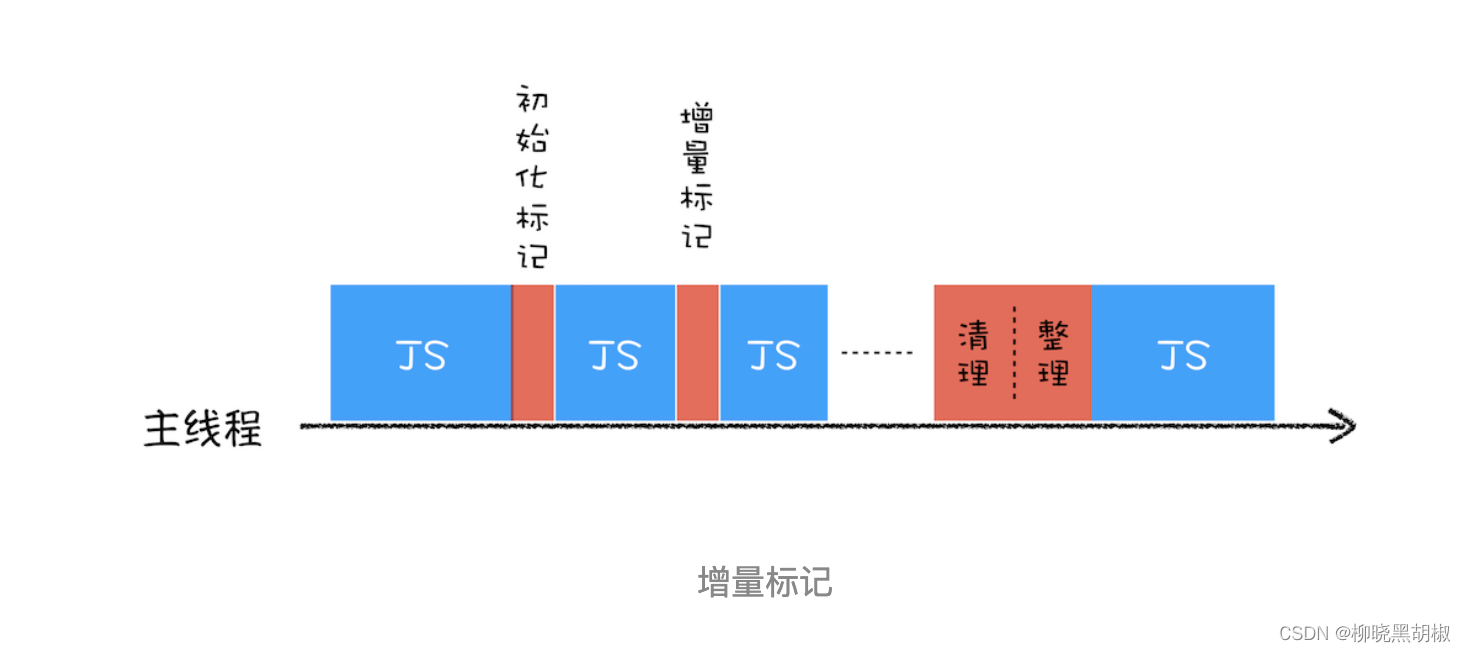
垃圾回收:垃圾数据如何自动回收
有些数据被使用之后,可能就不再需要了,我们把这种数据称为垃圾数据。如果这些垃圾数据一直保存在内存中,那么内存会越用越多,所以我们需要对这些垃圾数据进行回收,以释放有限的内存空间 不同语言的垃圾回收策略 通常…...

苹果笔不用原装可以吗?Apple Pencil平替笔推荐
近些年来,不管是学习还是画画,都有不少人喜欢用ipad。而ipad的用户,也是比较重视它的实用价值,尤其是不少人都想要好好利用来进行学习记笔记。事实上,有很多替代品都能替代Apple Pencil,仅仅用于记笔记就没…...
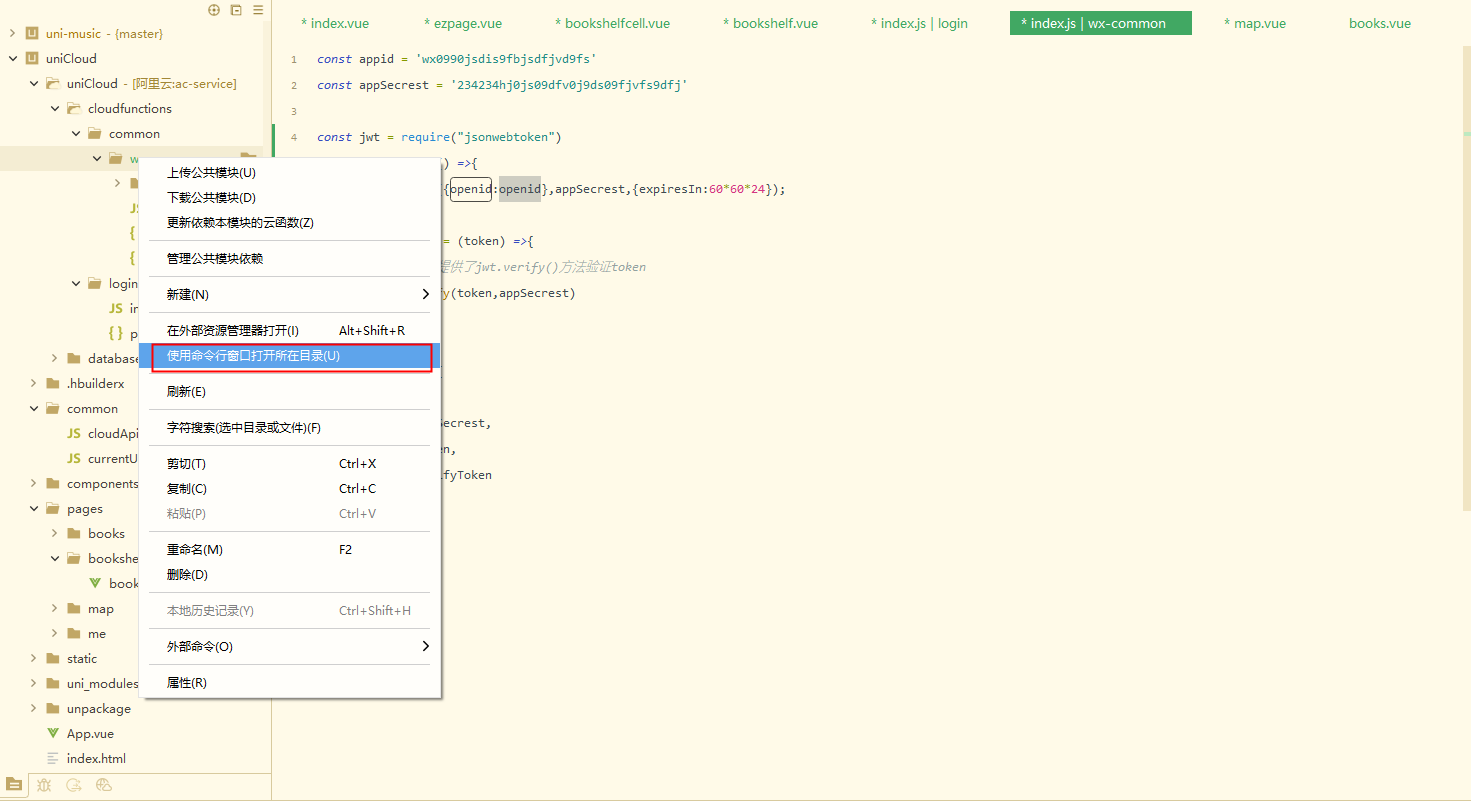
uniCloud基础使用-杂文
获取openID云函数use strict; exports.main async (event, context) > {//event为客户端上传的参数console.log(event : , event)// jscode2session 微信小程序登录接口,获取openidconst {code} event;// 云函数中如需要请求其他http服务,则使用uni…...
vector的模拟实现
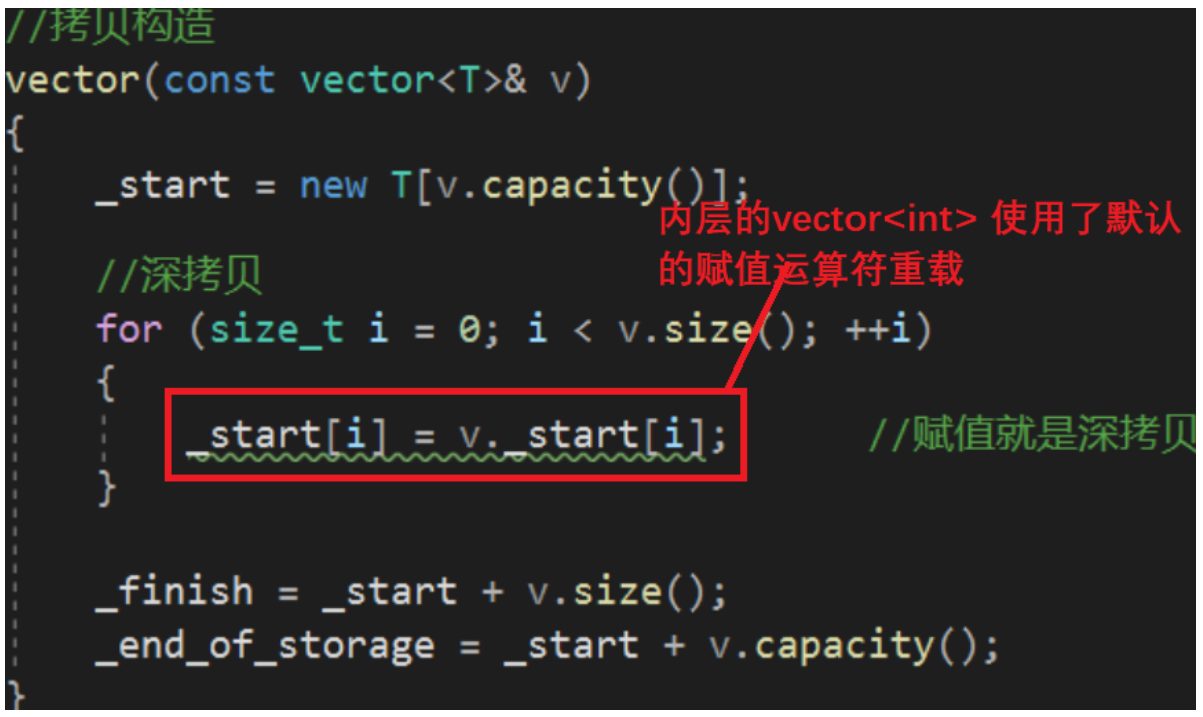
文章目录vector的模拟实现vector 结构定义1. vector的迭代器的实现2. vector四个默认成员函数2.1 构造函数2.1.1 无参2.1.2 n个val初始化2.1.3 迭代器初始化2.2 析构函数2.3 拷贝构造函数2.3.1 传统写法2.3.2 现代写法2.4 赋值重载运算符3. 管理数组相关接口3.1 reserve3.2 res…...
【无标题】compose系列教程-4.相对布局ConstraintLayout的使用
相对布局在Compose中被称为ConstraintLayout,它可以让您以相对于其他元素的方式放置元素。 以下是使用ConstraintLayout实现相对布局的示例代码: Composable fun ConstraintLayoutExample() { ConstraintLayout(modifier Modifier.fillMaxSize()…...
JavaEE简单示例——Bean管理
简单介绍: 在这一章节我们会比较详细的介绍我们在之前的测试类中以及Bean管理XML配置文件中所使用到的类和方法,以及XML中配置的属性所代表的详细含义。以及之前我们反复提到但是一直没有详细的讲解的一个东西:容器。我们可以大致的有一个概…...

react+antdpro+ts实现企业级项目四:注册页面实现及useEmotionCss的介绍
创建文件路径并注册register路由 在pages/User下创建Register文件夹并创建index.tsx文件 然后在config/routes创建register注册路由。注册完后,当在登陆页面点击注册按钮时就可以跳转到此注册页面而不会报404了。 export default [{path: /user,layout: false,rou…...

Shifu基础功能:数据采集
数据采集 我们可以通过HTTP/gRPC与deviceShifu进行通信,deviceShifu会将我们发送的请求转换成设备所支持协议的形式,并发送给设备。 当设备接收到指令之后,数据会传输到deviceShifu中,之后deviceShifu将数据作为我们请求的返回值…...
代码随想录算法训练营day54 | 动态规划之子序列 392.判断子序列 115.不同的子序列
day54392.判断子序列1.确定dp数组(dp table)以及下标的含义2.确定递推公式3.dp数组如何初始化4.确定遍历顺序5.举例推导dp数组115.不同的子序列1.确定dp数组(dp table)以及下标的含义2.确定递推公式3.dp数组如何初始化4.确定遍历顺…...
2.Vue编写一个app
1.src中重要的组成 1.1main.ts // 引入createApp用于创建应用 import { createApp } from "vue"; // 引用App根组件 import App from ./App.vue;createApp(App).mount(#app)1.2 App.vue 其中要写三种标签 <template> <!--html--> </template>…...
MySQL 8.0 OCP 英文题库解析(十三)
Oracle 为庆祝 MySQL 30 周年,截止到 2025.07.31 之前。所有人均可以免费考取原价245美元的MySQL OCP 认证。 从今天开始,将英文题库免费公布出来,并进行解析,帮助大家在一个月之内轻松通过OCP认证。 本期公布试题111~120 试题1…...
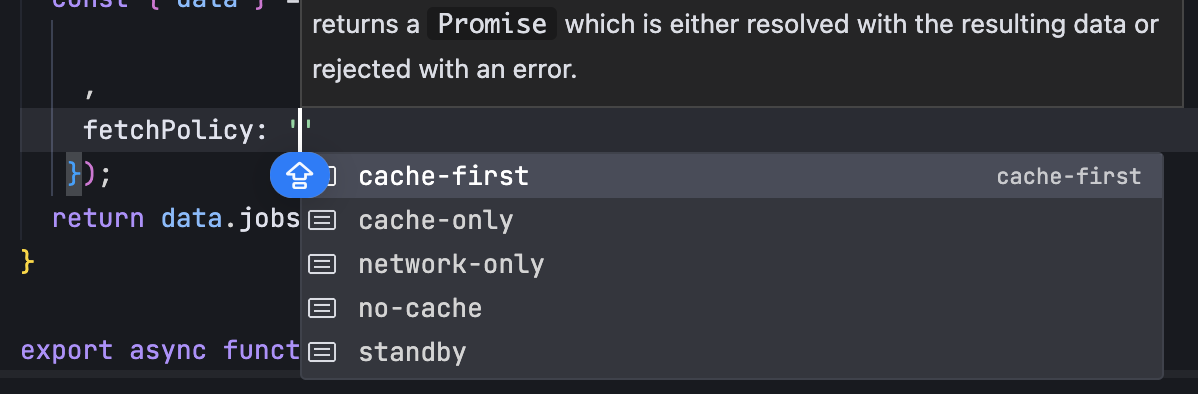
GraphQL 实战篇:Apollo Client 配置与缓存
GraphQL 实战篇:Apollo Client 配置与缓存 上一篇:GraphQL 入门篇:基础查询语法 依旧和上一篇的笔记一样,主实操,没啥过多的细节讲解,代码具体在: https://github.com/GoldenaArcher/graphql…...
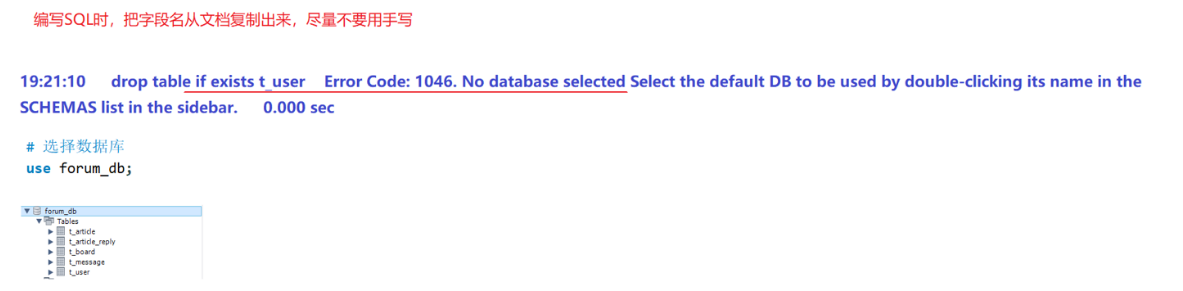
篇章二 论坛系统——系统设计
目录 2.系统设计 2.1 技术选型 2.2 设计数据库结构 2.2.1 数据库实体 1. 数据库设计 1.1 数据库名: forum db 1.2 表的设计 1.3 编写SQL 2.系统设计 2.1 技术选型 2.2 设计数据库结构 2.2.1 数据库实体 通过需求分析获得概念类并结合业务实现过程中的技术需要&#x…...

Python常用模块:time、os、shutil与flask初探
一、Flask初探 & PyCharm终端配置 目的: 快速搭建小型Web服务器以提供数据。 工具: 第三方Web框架 Flask (需 pip install flask 安装)。 安装 Flask: 建议: 使用 PyCharm 内置的 Terminal (模拟命令行) 进行安装,避免频繁切换。 PyCharm Terminal 配置建议: 打开 Py…...
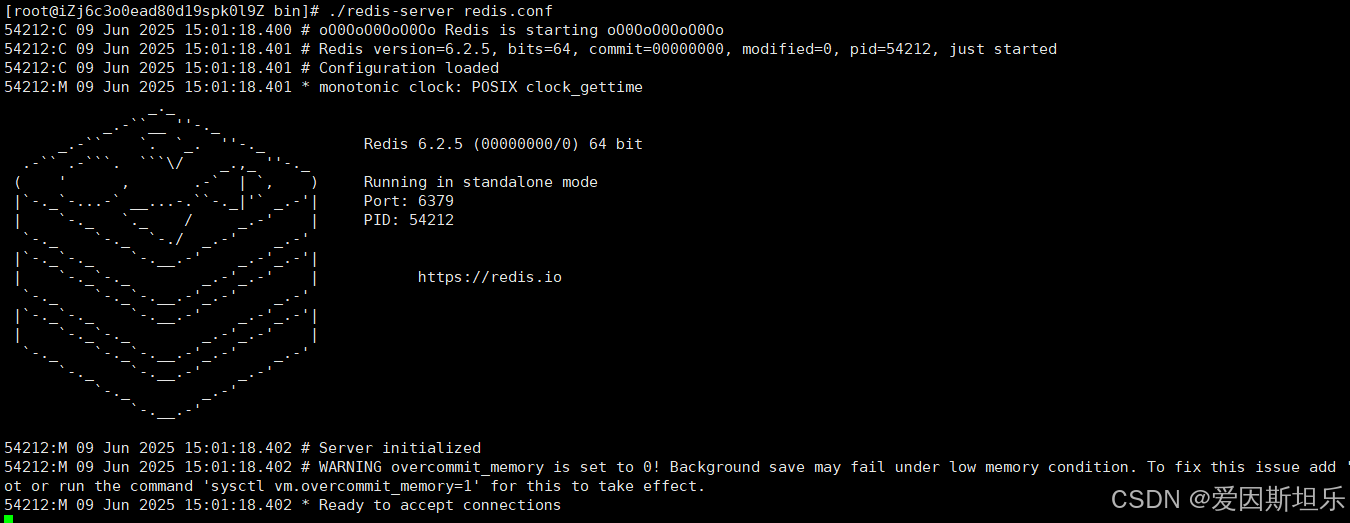
【若依】框架项目部署笔记
参考【SpringBoot】【Vue】项目部署_no main manifest attribute, in springboot-0.0.1-sn-CSDN博客 多一个redis安装 准备工作: 压缩包下载:http://download.redis.io/releases 1. 上传压缩包,并进入压缩包所在目录,解压到目标…...

Easy Excel
Easy Excel 一、依赖引入二、基本使用1. 定义实体类(导入/导出共用)2. 写 Excel3. 读 Excel 三、常用注解说明(完整列表)四、进阶:自定义转换器(Converter) 其它自定义转换器没生效 Easy Excel在…...
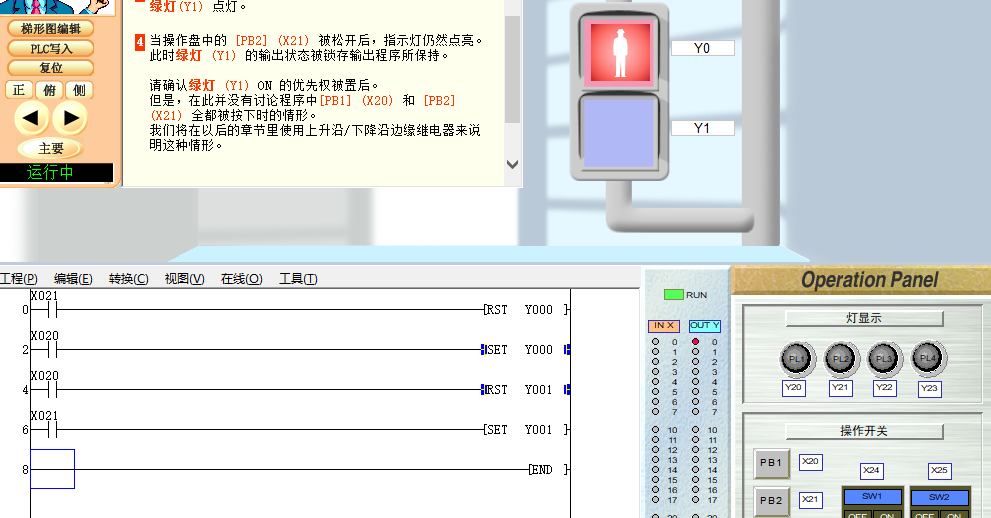
PLC入门【4】基本指令2(SET RST)
04 基本指令2 PLC编程第四课基本指令(2) 1、运用上接课所学的基本指令完成个简单的实例编程。 2、学习SET--置位指令 3、RST--复位指令 打开软件(FX-TRN-BEG-C),从 文件 - 主画面,“B: 让我们学习基本的”- “B-3.控制优先程序”。 点击“梯形图编辑”…...

uniapp获取当前位置和经纬度信息
1.1. 获取当前位置和经纬度信息(需要配置高的SDK) 调用uni-app官方API中的uni.chooseLocation(),即打开地图选择位置。 <button click"getAddress">获取定位</button> const getAddress () > {uni.chooseLocatio…...

Vue 实例的数据对象详解
Vue 实例的数据对象详解 在 Vue 中,数据对象是响应式系统的核心,也是组件状态的载体。理解数据对象的原理和使用方式是成为 Vue 专家的关键一步。我将从多个维度深入剖析 Vue 实例的数据对象。 一、数据对象的定义方式 1. Options API 中的定义 在 Options API 中,使用 …...