A Star算法最通俗易懂的一个版本
01-概述
虽然掌握了 A* 算法的人认为它容易,但是对于初学者来说, A* 算法还是很复杂的。
02-搜索区域
(The Search Area)
我们假设某人要从 A 点移动到 B 点,但是这两点之间被一堵墙隔开。如图 1 ,绿色是 A ,红色是 B ,中间蓝色是墙。
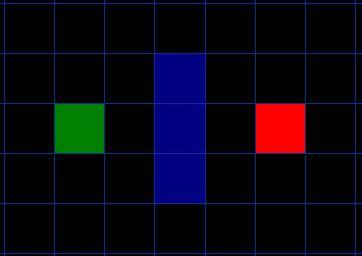
图 1

你应该注意到了,我们把要搜寻的区域划分成了正方形的格子。这是寻路的第一步,简化搜索区域,就像我们这里做的一样。这个特殊的方法把我们的搜索区域简化为了 2 维数组。数组的每一项代表一个格子,它的状态就是可走 (walkalbe) 和不可走 (unwalkable) 。通过计算出从 A 到 B需要走过哪些方格,就找到了路径。一旦路径找到了,人物便从一个方格的中心移动到另一个方格的中心,直至到达目的地。
方格的中心点我们成为“节点 (nodes) ”。如果你读过其他关于 A* 寻路算法的文章,你会发现人们常常都在讨论节点。为什么不直接描述为方格呢?因为我们有可能把搜索区域划为为其他多变形而不是正方形,例如可以是六边形,矩形,甚至可以是任意多变形。而节点可以放在任意多边形里面,可以放在多变形的中心,也可以放在多边形的边上。我们使用这个系统,因为它最简单。
03-开始搜索
(Starting the Search)
一旦我们把搜寻区域简化为一组可以量化的节点后,就像上面做的一样,我们下一步要做的便是查找最短路径。在 A* 中,我们从起点开始,检查其相邻的方格,然后向四周扩展,直至找到目标。
我们这样开始我们的寻路旅途:
从起点 A 开始,并把它就加入到一个由方格组成的 open list( 开放列表 ) 中。这个 open list 有点像是一个购物单。当然现在 open list 里只有一项,它就是起点 A ,后面会慢慢加入更多的项。 Open list 里的格子是路径可能会是沿途经过的,也有可能不经过。基本上 open list 是一个待检查的方格列表。
查看与起点 A 相邻的方格 ( 忽略其中墙壁所占领的方格,河流所占领的方格及其他非法地形占领的方格 ) ,把其中可走的 (walkable) 或可到达的 (reachable) 方格也加入到 open list 中。把起点 A 设置为这些方格的父亲 (parent node 或 parent square) 。当我们在追踪路径时,这些父节点的内容是很重要的。稍后解释。
把 A 从 open list 中移除,加入到 close list( 封闭列表 ) 中, close list 中的每个方格都是现在不需要再关注的。
如下图所示,深绿色的方格为起点,它的外框是亮蓝色,表示该方格被加入到了 close list 。与它相邻的黑色方格是需要被检查的,他们的外框是亮绿色。每个黑方格都有一个灰色的指针指向他们的父节点,这里是起点 A 。

图 2 。
8个,遵循怎样的规则进行选择
下一步,我们需要从 open list 中选一个与起点 A 相邻的方格,按下面描述的一样或多或少的重复前面的步骤。但是到底选择哪个方格好呢?具有最小 F 值的那个。
04-路径排序
(Path Sorting)
计算出组成路径的方格的关键是下面这个等式:
F = G + H
这里,
G = 从起点 A 移动到指定方格的移动代价,沿着到达该方格而生成的路径。
H = 从指定的方格移动到终点 B 的估算成本。
这个通常被称为试探法,有点让人混淆。为什么这么叫呢,因为这是个猜测。直到我们找到了路径我们才会知道真正的距离,因为途中有各种各样的东西 ( 比如墙壁,水等 ) 。本教程将教你一种计算 H 的方法,你也可以在网上找到其他方法。
路径是这样产生的
我们的路径是这么产生的:反复遍历 open list ,选择 F 值最小的方格。这个过程稍后详细描述。我们还是先看看怎么去计算上面的等式。
如上所述, G 是从起点A移动到指定方格的移动代价。在本例中,横向和纵向的移动代价为 10 ,对角线的移动代价为 14 。之所以使用这些数据,是因为实际的对角移动距离是 2 的平方根,或者是近似的 1.414 倍的横向或纵向移动代价。使用 10 和 14 就是为了简单起见。比例是对的,我们避免了开根和小数的计算。这并不是我们没有这个能力或是不喜欢数学。使用这些数字也可以使计算机更快。稍后你便会发现,如果不使用这些技巧,寻路算法将很慢。
既然我们是沿着到达指定方格的路径来计算 G 值,那么计算出该方格的 G 值的方法就是找出其父亲的 G 值,然后按父亲是直线方向还是斜线方向加上 10 或 14 。随着我们离开起点而得到更多的方格,这个方法会变得更加明朗。
有很多方法可以估算 H 值。这里我们使用 Manhattan 方法,计算从当前方格横向或纵向移动到达目标所经过的方格数,忽略对角移动,然后把方格总数乘以 10 。之所以叫做 Manhattan 方法,是因为这很像统计从一个地点到另一个地点所穿过的街区数,而你不能斜向穿过街区。重要的是,计算 H 是,要忽略路径中的障碍物。这是对剩余距离的估算值,而不是实际值,因此才称为试探法。
把 G 和 H 相加便得到 F 。我们第一步的结果如下图所示。每个方格都标上了 F , G , H 的值,就像起点右边的方格那样,左上角是 F ,左下角是 G ,右下角是 H 。
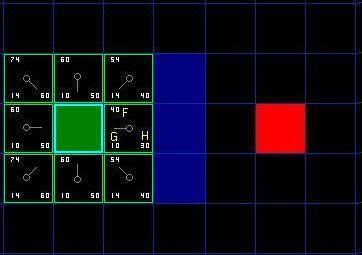
图 3
好,现在让我们看看其中的一些方格。在标有字母"F、G、H"的方格, G = 10 。这是因为水平方向从起点到那里只有一个方格的距离。与起点直接相邻的上方,下方,左方的方格的 G 值都是 10 ,对角线的方格 G 值都是 14 。
H 值通过估算起点于终点 ( 红色方格 ) 的 Manhattan 距离得到,仅作横向和纵向移动,并且忽略沿途的墙壁。使用这种方式,起点右边的方格到终点有 3 个方格的距离,因此 H = 30 。这个方格上方的方格到终点有 4 个方格的距离 ( 注意只计算横向和纵向距离 ) ,因此 H = 40 。对于其他的方格,你可以用同样的方法知道 H 值是如何得来的。
每个方格的 F 值,再说一次,直接把 G 值和 H 值相加就可以了。
05-继续搜索
(Continuing the Search)
为了继续搜索,我们从 open list 中选择 F 值最小的 ( 方格 ) 节点,然后对所选择的方格作如下操作:
把它从 open list 里取出,放到 close list 中。
检查所有与它相邻的方格,
忽略其中在 close list 中或是不可走 (unwalkable) 的方格 ( 比如墙,水,或是其他非法地形 )
如果方格不在open lsit 中,则把它们加入到 open list 中。
把我们选定的方格设置为这些新加入的方格的父亲。
如果某个相邻的方格已经在 open list 中,则检查这条路径是否更优,也就是说经由当前方格 ( 我们选中的方格 ) 到达那个方格是否具有更小的 G 值。如果没有,不做任何操作。
相反,如果 G 值更小,则把那个方格的父亲设为当前方格(我们选中的方格),然后重新计算那个方格的 F 值和 G 值。
如果你还是很混淆,请参考下图。

图 4
移动一个方格了
Ok ,让我们看看它是怎么工作的。在我们最初的 9 个方格中,还有 8 个在 open list 中,起点被放入了 close list 中。在这些方格中,起点右边的格子的 F 值 40 最小,因此我们选择这个方格作为下一个要处理的方格。它的外框用蓝线打亮。
注意思考: 检查周围的方格是如何实现的
首先,我们把它从 open list 移到 close list 中 ( 这就是为什么用蓝线打亮的原因了 ) 。然后我们检查与它相邻的方格。它右边的方格是墙壁,我们忽略。它左边的方格是起点,在 close list 中,我们也忽略。其他 4 个相邻的方格均在 open list 中,我们需要检查经由这个方格到达那里的路径是否更好,使用 G 值来判定。
让我们看看上面的方格。
它现在的 G 值为 14 。
如果我们经由当前方格到达那里, G 值将会为 20(其中 10 为到达当前方格的 G 值,此外还要加上从当前方格纵向移动到上面方格的 G 值 10) 。
显然 20 比 14 大,因此这不是最优的路径。
如果你看图你就会明白。直接从起点沿对角线移动到那个方格比先横向移动再纵向移动要好。
暂时选定一个F最小的之后,重新计算G。这个时候比较G
将F=40的舍弃
当把 4 个已经在 open list 中的相邻方格都检查后,没有发现经由当前方格的更好路径,因此我们不做任何改变。现在我们已经检查了当前方格的所有相邻的方格,并也对他们作了处理,是时候选择下一个待处理的方格了。
舍弃后重新选取一个F值最小的,对,是F值
舍弃后选取F值最小的
因此再次遍历我们的 open list ,现在它只有 7 个方格了,我们需要选择 F 值最小的那个。有趣的是,这次有两个方格的 F 值都 54 ,选哪个呢?没什么关系。从速度上考虑,选择最后加入 open list 的方格更快。这导致了在寻路过程中,当靠近目标时,优先使用新找到的方格的偏好。但是这并不重要。 ( 对相同数据的不同对待,导致两中版本的 A* 找到等长的不同路径 ) 。
我们选择起点右下方的方格,如下图所示。
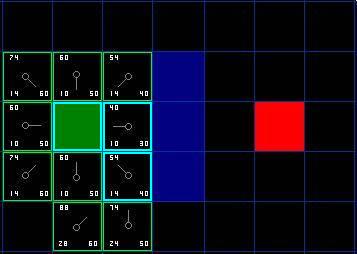
图 5
这次,当我们检查相邻的方格时,我们发现它右边的方格是墙,忽略之。上面的也一样。我们把墙下面的一格也忽略掉。为什么?因为如果不穿越墙角的话,你不能直接从当前方格移动到那个方格。你需要先往下走,然后再移动到那个方格,这样来绕过墙角。 ( 注意:穿越墙角的规则是可选的,依赖于你的节点是怎么放置的 )
加入OpenList的规则
这样还剩下 5 个相邻的方格。
当前方格下面的 2 个方格还没有加入 open list ,所以把它们加入,同时把当前方格设为他们的父亲。
在剩下的3 个方格中,有 2 个已经在 close list 中 ( 一个是起点,一个是当前方格上面的方格,外框被加亮的 ) ,我们忽略它们。
最后一个方格,也就是当前方格左边的方格,我们检查经由当前方格到达那里是否具有更小的 G 值。没有。因此我们准备从 open list 中选择下一个待处理的方格。
不断重复这个过程,直到把终点也加入到了 open list 中,此时如下图所示。
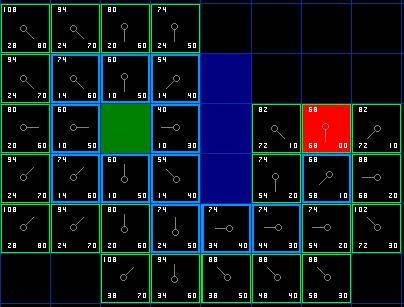
图 6
注意,在起点下面 2 格的方格的父亲已经与前面不同了。之前它的 G 值是 28 并且指向它右上方的方格。现在它的 G 值为 20 ,并且指向它正上方的方格。
这在寻路过程中的某处发生,使用新路径时 G 值经过检查并且变得更低,因此父节点被重新设置, G 和 F 值被重新计算。尽管这一变化在本例中并不重要,但是在很多场合中,这种变化会导致寻路结果的巨大变化。
明白为什么使用反转了
那么我们怎么样去确定实际路径呢?很简单,从0终点开始,按着箭头向父节点移动,这样你就被带回到了起点,这就是你的路径。如下图所示。从起点 A 移动到终点 B 就是简单从路径上的一个方格的中心移动到另一个方格的中心,直至目标。就是这么简单!
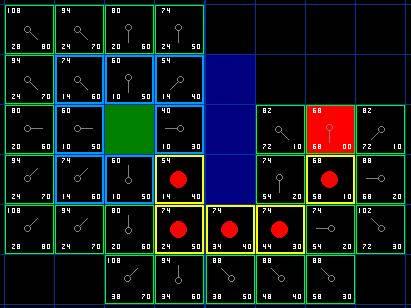
图 7
06-A*算法总结
(Summary of the A* Method)
Ok ,现在你已经看完了整个的介绍,现在我们把所有步骤放在一起:
把起点加入 open list 。
重复如下过程:
遍历 open list ,查找 F 值最小的节点,把它作为当前要处理的节点。
把这个节点移到 close list 。
对当前方格的 8 个相邻方格的每一个方格?
如果它是不可抵达的或者它在 close list 中,忽略它。否则,做如下操作。
如果它不在 open list 中,把它加入 open list ,并且把当前方格设置为它的父亲,记录该方格的 F , G 和 H 值。
如果它已经在 open list 中,检查这条路径 ( 即经由当前方格到达它那里 ) 是否更好,用 G 值作参考。更小的 G 值表示这是更好的路径。如果是这样,把它的父亲设置为当前方格,并重新计算它的 G 和 F 值。如果你的 open list 是按 F 值排序的话,改变后你可能需要重新排序。
停止,当你
把终点加入到了 open list 中,此时路径已经找到了,或者
查找终点失败,并且 open list 是空的,此时没有路径。
保存路径。从终点开始,每个方格沿着父节点移动直至起点,这就是你的路径。
07-题外话
(Small Rant)
请原谅我的离题,当你在网上或论坛上看到各种关于 A* 算法的讨论时,你偶尔会发现一些 A* 的代码,实际上他们不是。要使用 A* ,你必须包含上面讨论的所有元素 ---- 尤其是 open list , close list 和路径代价 G , H 和 F 。也有很多其他的寻路算法,这些算法并不是 A* 算法, A* 被认为是最好的。在本文末尾引用的一些文章中 Bryan Stout 讨论了他们的一部分,包括他们的优缺点。在某些时候你可以二中择一,但你必须明白自己在做什么。 Ok ,不废话了。回到文章。
08-实现的注解
(Notes on Implemetation)
现在你已经明白了基本方法,这里是你在写自己的程序是需要考虑的一些额外的东西。下面的材料引用了一些我用 C++ 和 Basic 写的程序,但是对其他语言同样有效。
维护 Open List :这是 A* 中最重要的部分。每次你访问 Open list ,你都要找出具有最小 F 值的方格。有几种做法可以做到这个。你可以随意保存路径元素,当你需要找到具 有最小 F 值的方格时,遍历整个 open list 。这个很简单,但对于很长的路径会很慢。这个方法可以通过维护一个排好序的表来改进,每次当你需要找到具有最小 F 值的方格时,仅取出表的第一项即可。我写程序时,这是我用的第一个方法。
对于小地图,这可以很好的工作,但这不是最快的方案。追求速度的 A* 程序员使用了叫做二叉堆的东西,我的程序里也用了这个。以我的经验,这种方法在多数场合下会快 2—3 倍,对于更长的路径速度成几何级数增长 (10 倍甚至更快 ) 。如果你想更多的了解二叉堆,请阅读Using Binary Heaps in A* Pathfinding 。
其他单位:如果你碰巧很仔细的看了我的程序,你会注意到我完全忽略了其他单位。我的寻路者实际上可以互相穿越。这取决于游戏,也许可以,也许不可以。如果你想考虑其他单位,并想使他们移动时绕过彼此,我建议你的寻路程序忽略它们,再写一些新的程序来判断两个单位是否会发生碰撞。如果发生碰撞,你可以产生一个新的路径,或者是使用一些标准的运动法则(比如永远向右移动,等等)直至障碍物不在途中,然后产生一个新的路径。为什么在计算初始路径是不包括其他单位呢?因为其他单位是可以动的,当你到达的时候它们可能不在自己的位置上。这可以产生一些怪异的结果,一个单位突然转向来避免和一个已不存在的单位碰撞,在它的路径计算出来后和穿越它路径的那些单位碰撞了。
在寻路代码中忽略其他单位,意味着你必须写另一份代码来处理碰撞。这是游戏的细节,所以我把解决方案留给你。本文末尾引用的 Bryan Stout's 的文章中的几种解决方案非常值得了解。
一些速度方面的提示:如果你在开发自己的 A* 程序或者是改编我写的程序,最后你会发现寻路占用了大量的 CPU 时间,尤其是当你有相当多的寻路者和一块很大的地图时。如果你阅读过网上的资料,你会发现就算是开发星际争霸,帝国时代的专家也是这样。如果你发现事情由于寻路而变慢了,这里有些主意很不错:
使用小地图或者更少的寻路者。
千万不要同时给多个寻路者寻路。取而代之的是把它们放入队列中,分散到几个游戏周期中。如果你的游戏以每秒 40 周期的速度运行,没人能察觉到。但是如果同时有大量的寻路者在寻路的话,他们会马上就发现游戏慢下来了。
考虑在地图中使用更大的方格。这减少了寻路时需要搜索的方格数量。如果你是有雄心的话,你可以设计多套寻路方案,根据路径的长度而使用在不同场合。这也是专业人士的做法,对长路径使用大方格,当你接近目标时使用小方格。如果你对这个有兴趣,请看 Two-Tiered A* Pathfinding 。
对于很长的路径,考虑使用路径点系统,或者可以预先计算路径并加入游戏中。
预先处理你的地图,指出哪些区域是不可到达的。这些区域称为“孤岛”。实际上,他们可以是岛屿,或者是被墙壁等包围而不可到达的任意区域。 A* 的下限是,你告诉他搜寻通往哪些区域的路径时,他会搜索整个地图,直到所有可以抵达的方格都通过 open list 或 close list 得到了处理。这会浪费大量的 CPU 时间。这可以通过预先设定不可到达的区域来解决。在某种数组中记录这些信息,在寻路前检查它。在我的 Blitz 版程序中,我写了个地图预处理程序来完成这个。它可以提前识别寻路算法会忽略的死路径,这又进一步提高了速度。
不同的地形损耗:在这个教程和我的程序中,地形只有 2 种:可抵达的和不可抵达 的。但是如果你有些可抵达的地形,移动代价会更高些,沼泽,山丘,地牢的楼梯
等都是可抵达的地形,但是移动代价比平地就要高。类似的,道路的移动代价就比 它周围的地形低。
在你计算给定方格的 G 值时加上地形的代价就很容易解决了这个问题。简单的给这些方格加上一些额外的代价就可以了。 A* 算法用来查找代价最低的路径,应该很容易处理这些。在我的简单例子中,地形只有可达和不可达两种, A* 会搜寻最短和最直接的路径。但是在有地形代价的环境中,代价最低的的路径可能会很长。
就像沿着公路绕过沼泽而不是直接穿越它。
另一个需要考虑的是专家所谓的“ influence Mapping ”,就像上面描述的可变成本地形一样,你可以创建一个额外的计分系统,把它应用到寻路的 AI 中。假设你有这样一张地图,地图上由个通道穿过山丘,有大批的寻路者要通过这个通道,电脑每次产生一个通过那个通道的路径都会变得很拥挤。如果需要,你可以产生一个 influence map ,它惩罚那些会发生大屠杀的方格。这会让电脑选择更安全的路径,也可以帮助它避免因为路径短(当然也更危险)而持续把队伍或寻路者送往某一特定路径。
维护未探测的区域:你玩 PC 游戏的时候是否发现电脑总是能精确的选择路径,甚至地图都未被探测。对于游戏来说,寻路过于精确反而不真实。幸运的是,这个问题很容易修正。答案就是为每个玩家和电脑(每个玩家,不是每个单位 --- 那会浪费很多内存)创建一个独立的 knownWalkability 数组。每个数组包含了玩家已经探测的区域的信息,和假设是可到达的其他区域,直到被证实。使用这种方法,单位会在路的死端徘徊,并会做出错误的选择,直到在它周围找到了路径。地图一旦被探测了,寻路又向平常一样工作。
平滑路径: A* 自动给你花费最小的,最短的路径,但它不会自动给你最平滑的路径。看看我们的例子所找到的路径(图 7 )。在这条路径上,第一步在起点的右下方,如果第一步在起点的正下方是不是路径会更平滑呢?
有几个方法解决这个问题。在你计算路径时,你可以惩罚那些改变方向的方格,把它的 G 值增加一个额外的开销。另一种选择是,你可以遍历你生成的路径,查找那些用相邻的方格替代会使路径更平滑的地方。要了解更多,请看 Toward More Realistic Pathfinding 。
非方形搜索区域:在我们的例子中,我们使用都是 2D 的方形的区域。你可以使用不规则的区域。想想冒险游戏中的那些国家,你可以设计一个像那样的寻路关卡。你需要建立一张表格来保存国家相邻关系,以及从一个国家移动到另一个国家的 G 值。你还需要一个方法了估算 H 值。其他的都可以向上面的例子一样处理。当你向 open list 添加新项时,不是使用相邻的方格,而是查看表里相邻的国家。
类似的,你可以为一张固定地形的地图的路径建立路径点系统。路径点通常是道路或地牢通道的转折点。作为游戏设计者,你可以预先设定路径点。如果两个路径点的连线没有障碍物的话它们被视为相邻的。在冒险游戏的例子中,你可以保存这些相邻信息在某种表中,当 open list 增加新项时使用。然后记录 G 值(可能用两个结点间的直线距离)和 H 值(可能使用从节点到目标的直线距离)。其它的都想往常一样处理。
相关文章:
A Star算法最通俗易懂的一个版本
01-概述虽然掌握了 A* 算法的人认为它容易,但是对于初学者来说, A* 算法还是很复杂的。02-搜索区域(The Search Area)我们假设某人要从 A 点移动到 B 点,但是这两点之间被一堵墙隔开。如图 1 ,绿色是 A ,红色是 B &…...

JavaWeb--ListenerAjaxaxiosjson
Listener&Ajax&axios1 Listener1.1 概述1.2 分类1.3 代码演示2 Ajax2.1 概述2.1.1 作用2.1.2 同步和异步2.2 快速入门2.2.1 服务端实现2.2.2 客户端实现2.2.3 测试2.3 案例2.3.1 分析2.3.2 后端实现2.3.3 前端实现2.4 测试3 axios3.1 基本使用3.2 快速入门3.2.1 后端实…...
NoneBot2,基于Python的聊天机器人
NoneBot2,基于Python的聊天机器人第一步,配置python第二步,配置[go-cqhttp](https://github.com/Mrs4s/go-cqhttp)第三步,配置[NoneBot](https://61d3d9dbcadf413fd3238e89--nonebot2.netlify.app/)NoneBot2 是一个现代、跨平台、…...

java反射机制及其详解
反射反射机制反射调用优化有时候我们做项目的时候不免需要用到大量配置文件,就拿框架举例,通过这些外部文件配置,在不修改的源码的情况下,来控制文件,就要用到我们的反射来解决 假设有一个Cat对象 public class Cat …...

Leetcode—环形链表
前言:给定一个链表,判断是否为循环链表并找环形链表的入口点 首先我们需要知道什么是双向循环链表,具体如下图所示。 对于链表,我们如何去判断链表是循环链表呢?又寻找入环点呢?我们可以利用快慢指针的方法…...

蓝牙耳机哪个戴的最舒服?久戴不累的蓝牙耳机推荐
在喧嚣的时代中,快节奏和疲惫充斥着我们的生活,于是耳机成为了人们必不可少的东西,无论是闲暇时亦或是正处在工作时,都会将它戴上,出门在外戴耳机变成了常态,所以小编就整理了一期久戴不累的蓝牙耳机。 No…...

25k的Java开发常问的AQS问题有哪些?
前言:面试高频的AQS问题大多。本文将以实战面试角度出发,将面试官喜欢问的一些问题罗列出来。 文章目录 AQSAQS定义底层实现独占锁举例底层实现独占锁超时获取锁共享锁举例共享锁实现原理作者辟谣AQS AQS定义 AQS的全称是AbstractQueuedSynchronizer,也就是抽象队列同步器…...

Grafana 监控面板绘制流程
本篇作者:IoTDB 社区 -- 张洪胤本文以 IoTDB V1.0.1 版本为例本文档介绍了 Apache IoTDB 监控指标通过 Prometheus 的方式进行采集,并且使用 Grafana 的方式进行可视化。1监控指标的 Prometheus 格式说明对于 Metric Name 为 name, Tags 为 K1V1, ..., K…...

一句话设计模式5:责任链模式
责任链模式:步步为营。 文章目录 责任链模式:步步为营。前言一、责任链模式的作用二、如何实现责任链1 既然是责任链,那么就需要一个链路的承载体 ChainBody2 责任链中每一步都是一个抽象类,因为承载体仅仅是构造链路顺序,里面不放置任何具体业务逻辑:步骤抽象类3 具体步骤执行…...

保姆级使用PyTorch训练与评估自己的EVA网络教程
文章目录前言0. 环境搭建&快速开始1. 数据集制作1.1 标签文件制作1.2 数据集划分1.3 数据集信息文件制作2. 修改参数文件3. 训练4. 评估5. 其他教程前言 项目地址:https://github.com/Fafa-DL/Awesome-Backbones 操作教程:https://www.bilibili.co…...

Java--JMH--性能测试--测试软件运行效率/时间--StopWatch
写在前面: 很多时候想要测试代码运行时间,或者比较2个运行的效率。 最简单的方法就是Sytem.currentTimeMillis记录2开始和结束时间来算 但是Java 代码越执行越快,放在后面的方法会有优势,这个原因受留个眼,以后研究。大概有受类加…...
JavaScript Array(数组)对象
数组对象的作用是:使用单独的变量名来存储一系列的值。参数参数 size 是期望的数组元素个数。返回的数组,length 字段将被设为 size 的值。参数 element ...; elementn 是参数列表。当使用这些参数来调用构造函数 Array() 时,新创建的数组的元…...

干货 | 电容在电路35个基本常识
第1个电压源正负端接了一个电容,与电路并联,用于整流电路时,具有很好的滤波作用,当电压交变时,由于电容的充电作用,两端的电压不能突变,就保证了电压的平稳。当用于电池电源时,具有交…...
日读300篇文献的技巧
感觉自己看文章很慢,有时候也抓不住重点。 如果是英文文献的话,可能还要有点难度,毕竟英语渣渣还是需要有中文-》英文的转换过程。 最近在搞毕业论文的时候,发现了一个非常好玩的东西,大大提升了我看文章搞科研&#x…...

C++核心编程
一、内存分区模型概述:C程序在执行时,将内存划分为4个区域程序运行前:代码区:存放函数体的二进制代码,由操作系统管理①共享。共享的目的是对于频繁被执行的程序,在内存中只需有一份代码即可②只读。使其只…...
SpringMVC程序开发
目录 SpringMVC 1、MVC定义 2、MVC和SpringMVC之间的关系 学SpringMVC 1、Spring MVC的创建和连接 浏览器获取前端接口和后端程序连接功能实现 2、获取参数 2.1、传递单个参数/多个参数 2.2、传递对象 2.3、传递表单参数 2.4、后端参数重命名 2.5、RequestBody接收J…...

多版本并发控制MVCC
什么是MVCC? MVCC是一种并发控制方法,一般在数据库管理系统中,实现数据库的并发访问。 可以使用乐观锁和悲观锁来实现。 MVCC的作用? 可以在不加锁的情况下解决读写问题,同时还可以解决脏读,幻读&#…...

JavaScript Date(日期)对象
日期对象用于处理日期和时间。在线实例返回当日的日期和时间如何使用 Date() 方法获得当日的日期。getFullYear()使用 getFullYear() 获取年份。getTime()getTime() 返回从 1970 年 1 月 1 日至今的毫秒数。setFullYear()如何使用 setFullYear() 设置具体的日期。toUTCString()…...
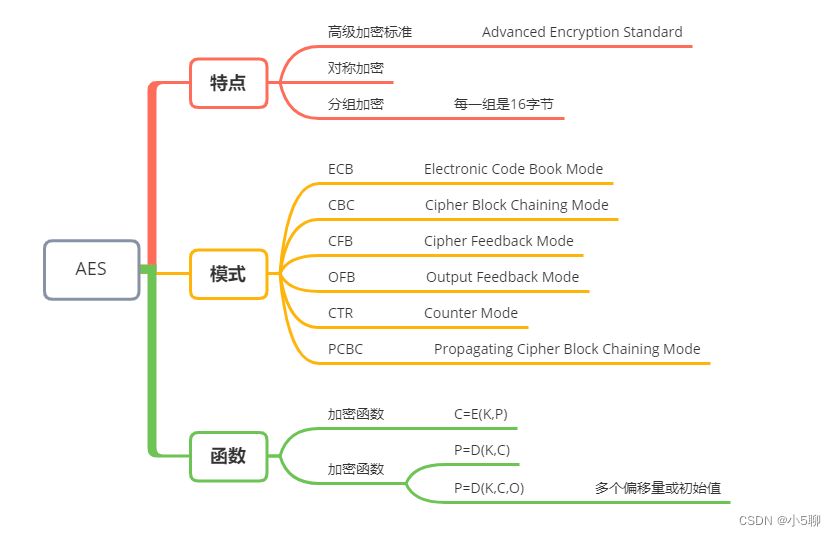
【Python】AES加解密代码,文章还有加密串等你来解密,等你来挑战
🍦🍦写这篇AES文章也是有件趣事,有位小伙伴发了段密文,看看谁解密速度快,学过Python的小伙伴一下子就解开来了,内容也挺有趣的。 🍟🍟原来加解密也可以这么有趣,虽然看起…...

代码随想录【Day34】| 1005. K 次取反后最大化的数组和、134. 加油站、135. 分发糖果
1005. K 次取反后最大化的数组和 题目链接 题目描述: 给定一个整数数组 A,我们只能用以下方法修改该数组:我们选择某个索引 i 并将 A[i] 替换为 -A[i],然后总共重复这个过程 K 次。(我们可以多次选择同一个索引 i。&…...

Linux链表操作全解析
Linux C语言链表深度解析与实战技巧 一、链表基础概念与内核链表优势1.1 为什么使用链表?1.2 Linux 内核链表与用户态链表的区别 二、内核链表结构与宏解析常用宏/函数 三、内核链表的优点四、用户态链表示例五、双向循环链表在内核中的实现优势5.1 插入效率5.2 安全…...
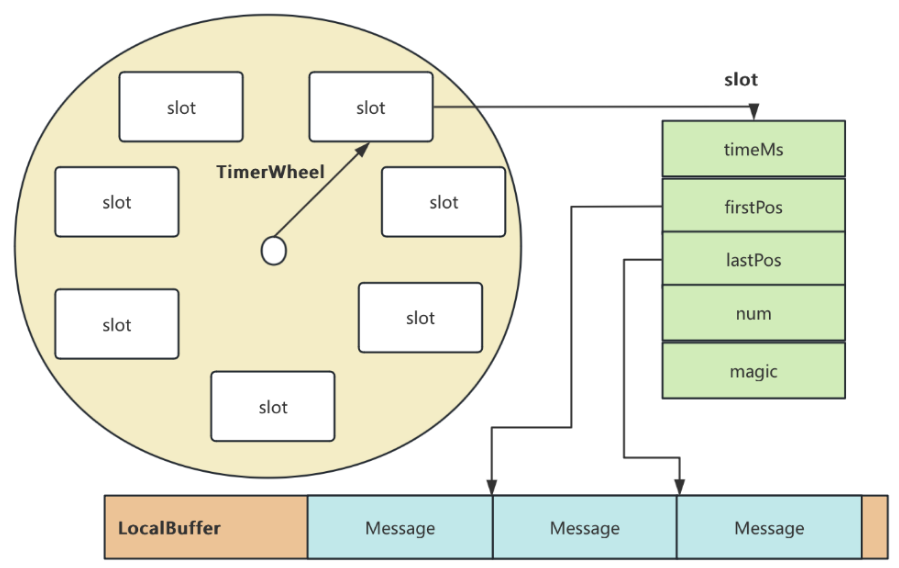
RocketMQ延迟消息机制
两种延迟消息 RocketMQ中提供了两种延迟消息机制 指定固定的延迟级别 通过在Message中设定一个MessageDelayLevel参数,对应18个预设的延迟级别指定时间点的延迟级别 通过在Message中设定一个DeliverTimeMS指定一个Long类型表示的具体时间点。到了时间点后…...
)
Spring Boot 实现流式响应(兼容 2.7.x)
在实际开发中,我们可能会遇到一些流式数据处理的场景,比如接收来自上游接口的 Server-Sent Events(SSE) 或 流式 JSON 内容,并将其原样中转给前端页面或客户端。这种情况下,传统的 RestTemplate 缓存机制会…...
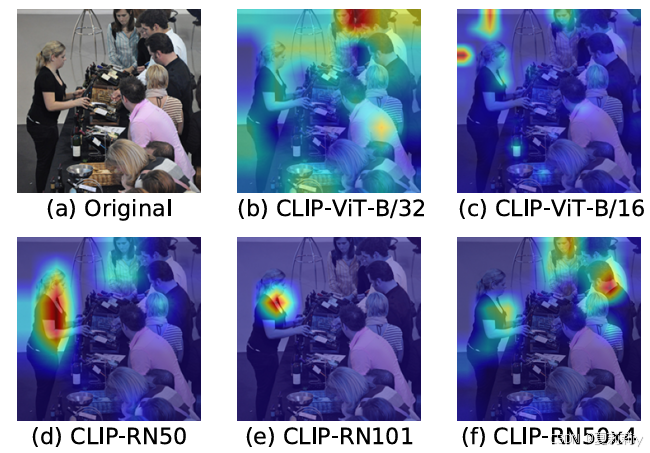
[ICLR 2022]How Much Can CLIP Benefit Vision-and-Language Tasks?
论文网址:pdf 英文是纯手打的!论文原文的summarizing and paraphrasing。可能会出现难以避免的拼写错误和语法错误,若有发现欢迎评论指正!文章偏向于笔记,谨慎食用 目录 1. 心得 2. 论文逐段精读 2.1. Abstract 2…...

【SQL学习笔记1】增删改查+多表连接全解析(内附SQL免费在线练习工具)
可以使用Sqliteviz这个网站免费编写sql语句,它能够让用户直接在浏览器内练习SQL的语法,不需要安装任何软件。 链接如下: sqliteviz 注意: 在转写SQL语法时,关键字之间有一个特定的顺序,这个顺序会影响到…...

2025盘古石杯决赛【手机取证】
前言 第三届盘古石杯国际电子数据取证大赛决赛 最后一题没有解出来,实在找不到,希望有大佬教一下我。 还有就会议时间,我感觉不是图片时间,因为在电脑看到是其他时间用老会议系统开的会。 手机取证 1、分析鸿蒙手机检材&#x…...
MySQL 8.0 OCP 英文题库解析(十三)
Oracle 为庆祝 MySQL 30 周年,截止到 2025.07.31 之前。所有人均可以免费考取原价245美元的MySQL OCP 认证。 从今天开始,将英文题库免费公布出来,并进行解析,帮助大家在一个月之内轻松通过OCP认证。 本期公布试题111~120 试题1…...

【OSG学习笔记】Day 16: 骨骼动画与蒙皮(osgAnimation)
骨骼动画基础 骨骼动画是 3D 计算机图形中常用的技术,它通过以下两个主要组件实现角色动画。 骨骼系统 (Skeleton):由层级结构的骨头组成,类似于人体骨骼蒙皮 (Mesh Skinning):将模型网格顶点绑定到骨骼上,使骨骼移动…...

在QWebEngineView上实现鼠标、触摸等事件捕获的解决方案
这个问题我看其他博主也写了,要么要会员、要么写的乱七八糟。这里我整理一下,把问题说清楚并且给出代码,拿去用就行,照着葫芦画瓢。 问题 在继承QWebEngineView后,重写mousePressEvent或event函数无法捕获鼠标按下事…...
提供了哪些便利?)
现有的 Redis 分布式锁库(如 Redisson)提供了哪些便利?
现有的 Redis 分布式锁库(如 Redisson)相比于开发者自己基于 Redis 命令(如 SETNX, EXPIRE, DEL)手动实现分布式锁,提供了巨大的便利性和健壮性。主要体现在以下几个方面: 原子性保证 (Atomicity)ÿ…...