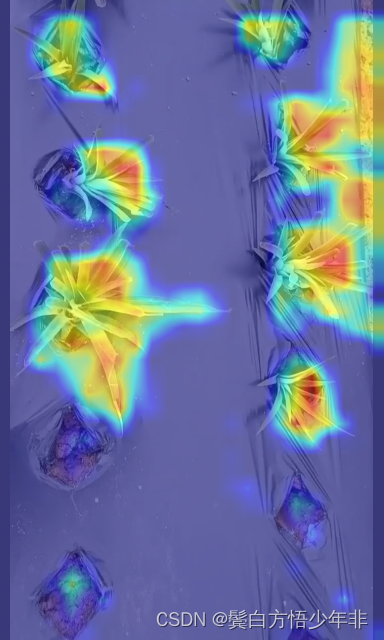
yolov8通过训练完成的模型生成图片热力图--论文需要
源代码来自于网络
使用pytorch_grad_cam,对特定图片生成热力图结果。
安装热力图工具
pip install pytorch_grad_cam
pip install grad-cam
# get_params中的参数:
# weight:
# 模型权重文件,代码默认是yolov8m.pt
# cfg:
# 模型文件,代码默认是yolov8m.yaml,需要注意的是需要跟weight中的预训练文件的配置是一样的,不然会报错
# device:
# 选择使用GPU还是CPU
# method:
# 选择grad-cam方法,默认是GradCAM,这里是提供了几种,可能对效果有点不一样,大家大胆尝试。
# layer::
# 选择需要可视化的层数,只需要修改数字即可,比如想用第9层,也就是model.model[9]。
# backward_type:
# 反向传播的方式,可以是以conf的loss传播,也可以class的loss传播,一般选用all,效果比较好一点。
# conf_threshold:
# 置信度,默认是0.6。
# ratio:
# 默认是0.02,就是用来筛选置信度高的结果,低的就舍弃,0.02则是筛选置信度最高的前2%的图像来进行热力图。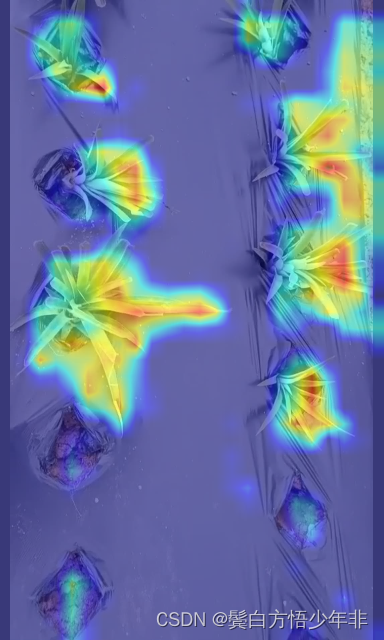import warningswarnings.filterwarnings('ignore')
warnings.simplefilter('ignore')
import torch, cv2, os, shutil
import numpy as npnp.random.seed(0)
import matplotlib.pyplot as plt
from tqdm import trange
from PIL import Image
from ultralytics.nn.tasks import DetectionModel as Model
from ultralytics.utils.torch_utils import intersect_dicts
from ultralytics.utils.ops import xywh2xyxy
from pytorch_grad_cam import GradCAMPlusPlus, GradCAM, XGradCAM
from pytorch_grad_cam.utils.image import show_cam_on_image
from pytorch_grad_cam.activations_and_gradients import ActivationsAndGradientsdef letterbox(im, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32):# Resize and pad image while meeting stride-multiple constraintsshape = im.shape[:2] # current shape [height, width]if isinstance(new_shape, int):new_shape = (new_shape, new_shape)# Scale ratio (new / old)r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])if not scaleup: # only scale down, do not scale up (for better val mAP)r = min(r, 1.0)# Compute paddingratio = r, r # width, height ratiosnew_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh paddingif auto: # minimum rectangledw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh paddingelif scaleFill: # stretchdw, dh = 0.0, 0.0new_unpad = (new_shape[1], new_shape[0])ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratiosdw /= 2 # divide padding into 2 sidesdh /= 2if shape[::-1] != new_unpad: # resizeim = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))left, right = int(round(dw - 0.1)), int(round(dw + 0.1))im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add borderreturn im, ratio, (dw, dh)class yolov8_heatmap:def __init__(self, weight, cfg, device, method, layer, backward_type, conf_threshold, ratio):device = torch.device(device)ckpt = torch.load(weight)model_names = ckpt['model'].namescsd = ckpt['model'].float().state_dict() # checkpoint state_dict as FP32model = Model(cfg, ch=3, nc=len(model_names)).to(device)csd = intersect_dicts(csd, model.state_dict(), exclude=['anchor']) # intersectmodel.load_state_dict(csd, strict=False) # loadmodel.eval()print(f'Transferred {len(csd)}/{len(model.state_dict())} items')target_layers = [eval(layer)]method = eval(method)colors = np.random.uniform(0, 255, size=(len(model_names), 3)).astype(np.int32)self.__dict__.update(locals())def post_process(self, result):logits_ = result[:, 4:]boxes_ = result[:, :4]sorted, indices = torch.sort(logits_.max(1)[0], descending=True)return torch.transpose(logits_[0], dim0=0, dim1=1)[indices[0]], torch.transpose(boxes_[0], dim0=0, dim1=1)[indices[0]], xywh2xyxy(torch.transpose(boxes_[0], dim0=0, dim1=1)[indices[0]]).cpu().detach().numpy()def draw_detections(self, box, color, name, img):xmin, ymin, xmax, ymax = list(map(int, list(box)))cv2.rectangle(img, (xmin, ymin), (xmax, ymax), tuple(int(x) for x in color), 2)cv2.putText(img, str(name), (xmin, ymin - 5), cv2.FONT_HERSHEY_SIMPLEX, 0.8, tuple(int(x) for x in color), 2,lineType=cv2.LINE_AA)return imgdef __call__(self, img_path, save_path):# remove dir if existif os.path.exists(save_path):shutil.rmtree(save_path)# make dir if not existos.makedirs(save_path, exist_ok=True)# img processimg = cv2.imread(img_path)img = letterbox(img)[0]img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)img = np.float32(img) / 255.0tensor = torch.from_numpy(np.transpose(img, axes=[2, 0, 1])).unsqueeze(0).to(self.device)# init ActivationsAndGradientsgrads = ActivationsAndGradients(self.model, self.target_layers, reshape_transform=None)# get ActivationsAndResultresult = grads(tensor)activations = grads.activations[0].cpu().detach().numpy()# postprocess to yolo outputpost_result, pre_post_boxes, post_boxes = self.post_process(result[0])print(post_result.size(0))for i in trange(int(post_result.size(0) * self.ratio)):if float(post_result[i].max()) < self.conf_threshold:breakself.model.zero_grad()# get max probability for this predictionif self.backward_type == 'class' or self.backward_type == 'all':score = post_result[i].max()score.backward(retain_graph=True)if self.backward_type == 'box' or self.backward_type == 'all':for j in range(4):score = pre_post_boxes[i, j]score.backward(retain_graph=True)# process heatmapif self.backward_type == 'class':gradients = grads.gradients[0]elif self.backward_type == 'box':gradients = grads.gradients[0] + grads.gradients[1] + grads.gradients[2] + grads.gradients[3]else:gradients = grads.gradients[0] + grads.gradients[1] + grads.gradients[2] + grads.gradients[3] + \grads.gradients[4]b, k, u, v = gradients.size()weights = self.method.get_cam_weights(self.method, None, None, None, activations,gradients.detach().numpy())weights = weights.reshape((b, k, 1, 1))saliency_map = np.sum(weights * activations, axis=1)saliency_map = np.squeeze(np.maximum(saliency_map, 0))saliency_map = cv2.resize(saliency_map, (tensor.size(3), tensor.size(2)))saliency_map_min, saliency_map_max = saliency_map.min(), saliency_map.max()if (saliency_map_max - saliency_map_min) == 0:continuesaliency_map = (saliency_map - saliency_map_min) / (saliency_map_max - saliency_map_min)# add heatmap and box to imagecam_image = show_cam_on_image(img.copy(), saliency_map, use_rgb=True)cam_image = Image.fromarray(cam_image)cam_image.save(f'{save_path}/{i}.png')def get_params():params = {'weight': './weights/bz-yolov8-aspp-s-100.pt', # 这选择想要热力可视化的模型权重路径'cfg': './ultralytics/cfg/models/cfg2024/YOLOv8-金字塔结构改进/YOLOv8-ASPP.yaml', # 这里选择与训练上面模型权重相对应的.yaml文件路径'device': 'cpu', # 选择设备,其中0表示0号显卡。如果使用CPU可视化 # 'device': 'cpu' cuda:0'method': 'GradCAM', # GradCAMPlusPlus, GradCAM, XGradCAM'layer': 'model.model[6]', # 选择特征层'backward_type': 'all', # class, box, all'conf_threshold': 0.65, # 置信度阈值默认0.65, 可根据情况调节'ratio': 0.02 # 取前多少数据,默认是0.02,可根据情况调节}return paramsif __name__ == '__main__':model = yolov8_heatmap(**get_params()) # 初始化model('output_002.jpg', './result') # 第一个参数是图片的路径,第二个参数是保存路径,比如是result的话,其会创建一个名字为result的文件夹,如果result文件夹不为空,其会先清空文件夹。相关文章:
yolov8通过训练完成的模型生成图片热力图--论文需要
源代码来自于网络 使用pytorch_grad_cam,对特定图片生成热力图结果。 安装热力图工具 pip install pytorch_grad_cam pip install grad-cam# get_params中的参数: # weight: # 模型权重文件,代码默认是yolov8m.pt # c…...
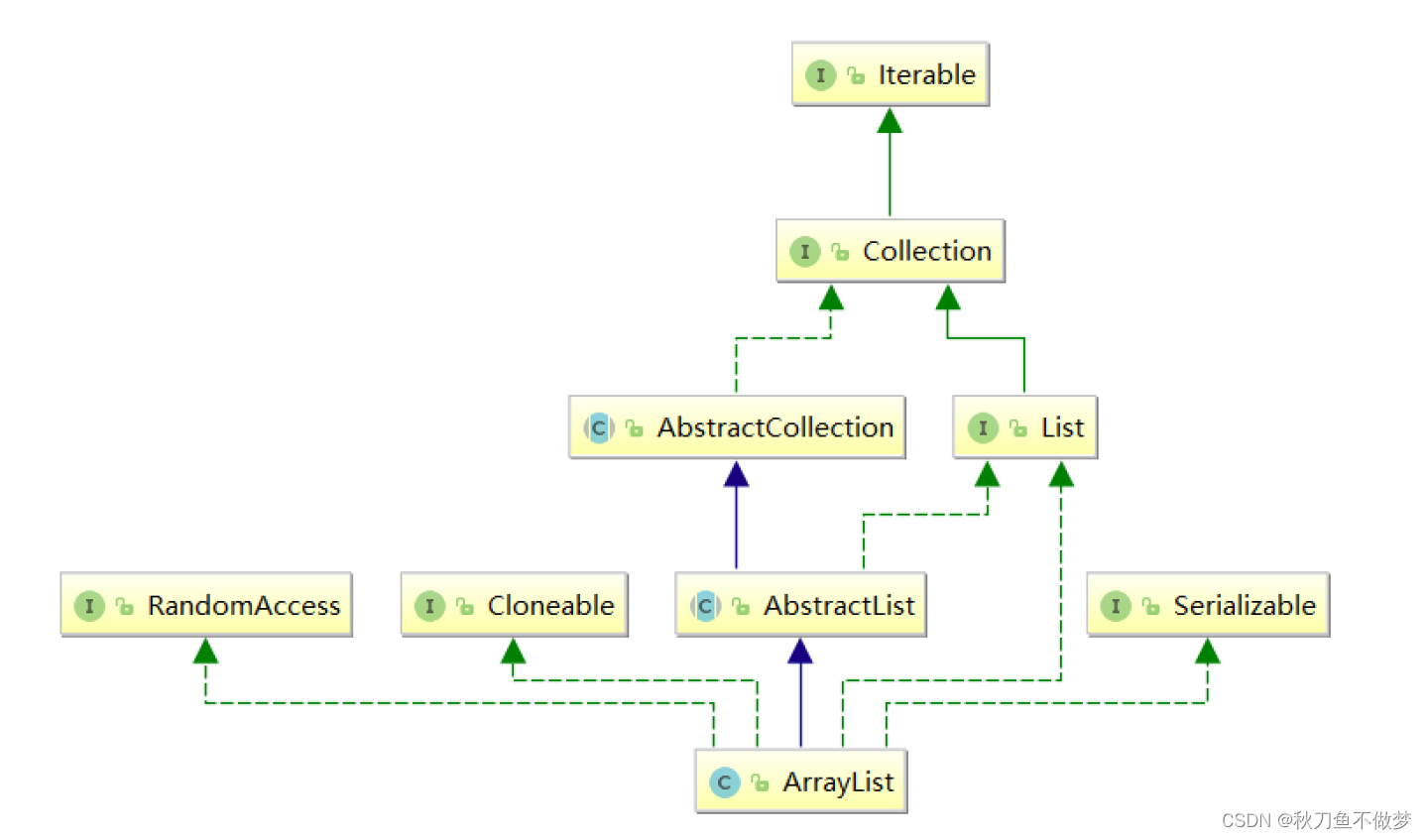
Java数据结构之ArrayList(如果想知道Java中有关ArrayList的知识点,那么只看这一篇就足够了!)
前言:ArrayList是Java中最常用的动态数组实现之一,它提供了便捷的操作接口和灵活的扩展能力,使得在处理动态数据集合时非常方便。本文将深入探讨Java中ArrayList的实现原理、常用操作以及一些使用场景。 ✨✨✨这里是秋刀鱼不做梦的BLOG ✨✨…...
Zadig vs. Jenkins 详细比较
01、Zadig vs. Jenkins:关于时代的选择 最近官方公众号发布了一篇名为 《是时候和 Jenkins 说再见了》的文章,引起了社区的广泛关注和讨论。作为曾经最被广泛使用的持续构建交付工具,Jenkins 的江湖地位似乎被挑战了。评论中有一条被高度点赞…...

航拍无人机像素坐标转世界坐标
一、背景 已知相机参数(传感器宽度和高度、图像宽度和高度、焦距、相对航高、像主点坐标 ),在给定像素坐标的前提下,求世界坐标,大部分通过AI来实现,不知道哪个步骤有问题,望大家指正 二、代码…...

Linux系统学习——指令二
Linux系统学习——指令二 sed 指令perl 指令rpm 指令rz 和 sz 指令查看文件大小及压缩文件指令使用tar命令:使用zip命令:注意事项: 解压文件指令 sed 指令 使用sed命令:sed -i s/旧内容/新内容/g 文件名,这将会在文件…...

【逻辑回归】和【线性回归】的区别和联系-九五小庞
逻辑回归(Logistic Regression)和线性回归(Linear Regression)是两种常用的统计学习和机器学习技术,它们各自具有特定的应用场景和优势。以下是它们之间的主要区别和联系: 定义与目的 线性回归:…...

富格林:正视欺诈阻挠交易被骗
富格林指出,在交易的过程中,投资者们就算做了十分的把握,也难免会出现亏损。因此建议新手投资者,在准备投资时一定要做好充分的准备工作,明辨欺诈陷阱,同时学习正规的做单盈利技巧,这才能帮助我…...

如何在WPS中加载EndNote X9插件
如何在WPS中加载EndNote X9插件 步骤1:关闭WPS 确保所有WPS文档和窗口都已关闭。 步骤2:修改文件后缀 打开文件资源管理器,导航到路径:C:\Program Files (x86)\EndNote X9\Product-Support\CWYW。找到文件 Cwyw_X86.dat&#…...
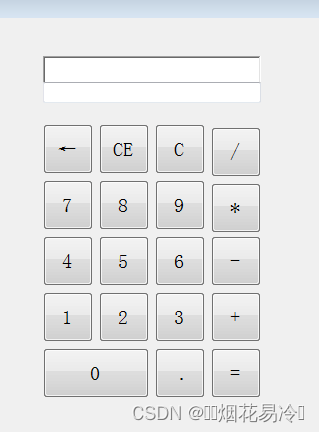
vb.net小demo(计算器、文件处理等/C#也可看)
Demo1:使用窗体控件实现一个简易版计算器 Public Class Form1Private Sub Button_1_Click(sender As Object, e As EventArgs) Handles Button_1.ClickCalSubBox.Text Button_1.TextEnd SubPrivate Sub Button_2_Click(sender As Object, e As EventArgs) Handles …...

【vue3|第8期】深入理解Vue 3 computed计算属性
日期:2024年6月10日 作者:Commas 签名:(ง •_•)ง 积跬步以致千里,积小流以成江海…… 注释:如果您觉得有所帮助,帮忙点个赞,也可以关注我,我们一起成长;如果有不对的地方…...
《精通ChatGPT:从入门到大师的Prompt指南》附录C:专业术语表
附录C:专业术语表 本附录旨在为读者提供一本全面的术语表,帮助理解《精通ChatGPT:从入门到大师的Prompt指南》中涉及的各种专业术语。无论是初学者还是高级用户,这些术语的定义和解释将为您在使用ChatGPT时提供重要参考。 A AI&…...
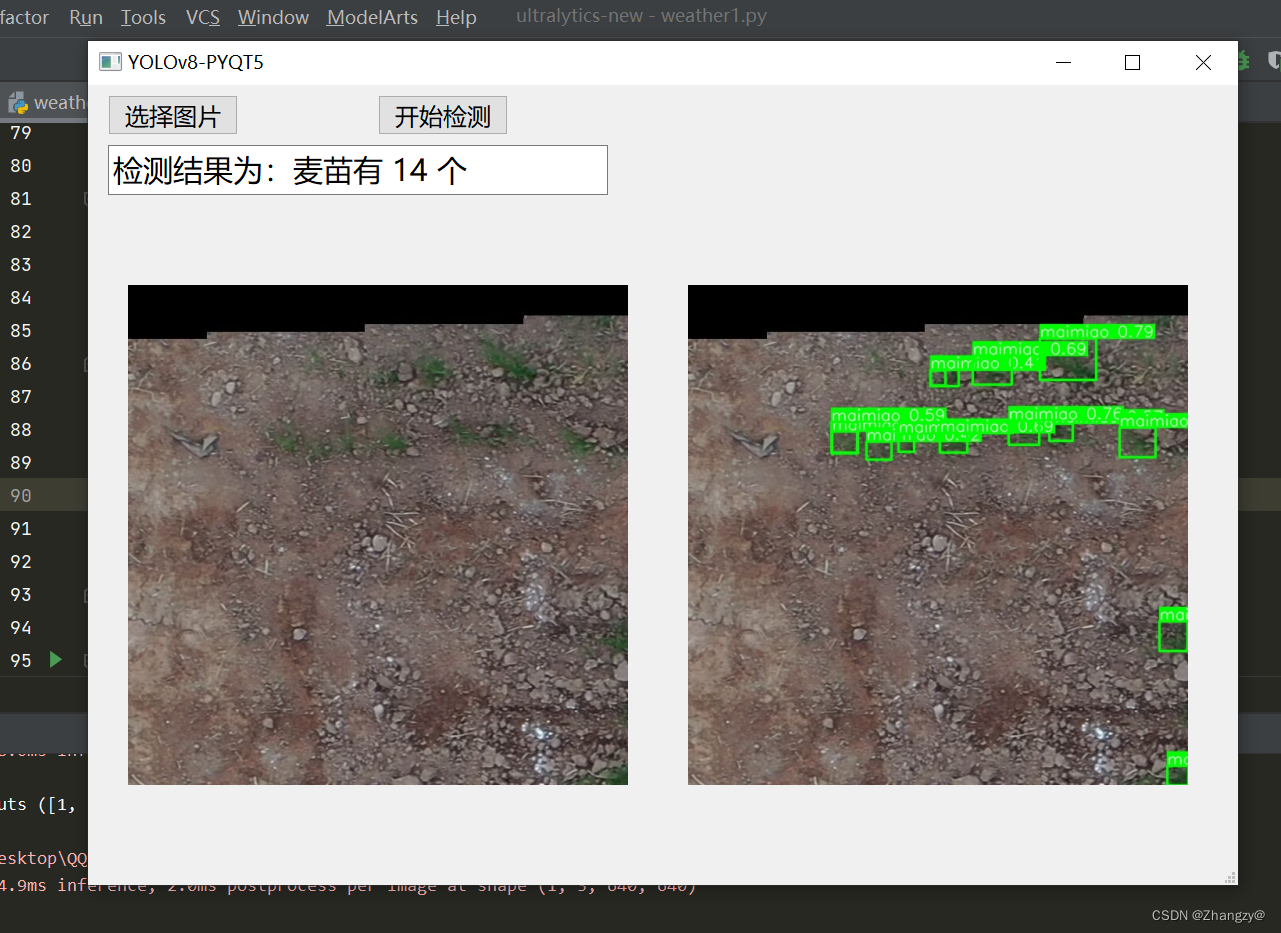
YOLOv8可视化界面PYQT5
yolov8,可视化界面pyqt。支持图片检测,视频检测,摄像头检测等,实时显示检测画面。支持自定义数据集,计数,fps展示……,即插即用,无需更改太多代码...
远程代码执行和远程命令执行是一个东西吗
远程代码执行(Remote Code Execution,简称RCE)和远程命令执行在概念上有所区别,但两者都涉及到攻击者通过远程方式在目标系统上执行代码或命令。以下是两者的详细比较: 定义: 远程代码执行(RCE…...

C++ 20新特性之线程与jthread
💡 如果想阅读最新的文章,或者有技术问题需要交流和沟通,可搜索并关注微信公众号“希望睿智”。 为什么要引入jthread 在C 11中,已经引入了std::thread。std::thread为C标准库带来了一流的线程支持,极大地促进了多线程…...
)
赶紧收藏!2024 年最常见 20道并发编程面试题(七)
上一篇地址:赶紧收藏!2024 年最常见 20道并发编程面试题(六)-CSDN博客 十三、什么是线程局部存储(Thread-Local Storage)? 线程局部存储(Thread-Local Storage,简称TLS…...
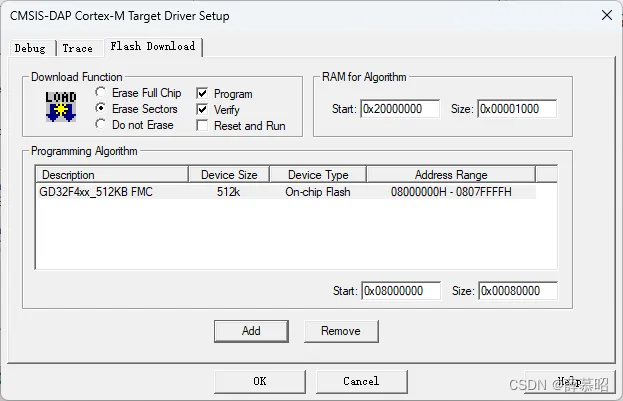
HAL库开发--第一盏灯
知不足而奋进 望远山而前行 目录 文章目录 前言 学习目标 学习内容 需求 开发流程 项目创建 芯片配置 功能配置 时钟配置 项目配置 编写代码 编译测试 烧录失败解决 编辑 总结 前言 在嵌入式系统开发中,掌握HAL库开发流程、STMCubeMX配置过程以及…...
Linux C语言:变量的作用域和生命周期(auto、register、static和extern)
一、变量存储类型-auto 1、auto变量的说明 变量在程序中使用时,必须预先说明它们的存储类型和数据类型。 变量说明的一般形式是: <存储类型> <数据类型 > <变量名> ; <存储类型>是关键词auto、register、static和extern<…...

AI Stable diffusion 报错:稳定扩散模型加载失败,退出
可能是内存不够,看看你最近是加了新的大的模型,可以把你的stable-diffusion-webui\models\Stable-diffusion目录下的某个ckpt删除掉,可能ckpt太大,无法加载成功; Stable diffusion model failed to load, exiting 如图…...
[Python学习篇] Python循环语句
while 循环 语法: while 条件: 条件成立后会重复执行的代码 ...... 示例1:死循环 # 这是一个死循环示例 while True:print("我正在重复执行")示例2:循环指定次数 i 1 while i < 5:print(f"执行次数 {i}")…...

MongoDB 正则表达式
MongoDB 正则表达式 MongoDB 是一个流行的 NoSQL 数据库,它提供了强大的查询功能,包括对正则表达式的支持。正则表达式是一种强大的文本搜索工具,它允许用户根据特定的模式匹配和搜索字符串。在 MongoDB 中,正则表达式可以用于查…...

内存分配函数malloc kmalloc vmalloc
内存分配函数malloc kmalloc vmalloc malloc实现步骤: 1)请求大小调整:首先,malloc 需要调整用户请求的大小,以适应内部数据结构(例如,可能需要存储额外的元数据)。通常,这包括对齐调整,确保分配的内存地址满足特定硬件要求(如对齐到8字节或16字节边界)。 2)空闲…...

智慧工地云平台源码,基于微服务架构+Java+Spring Cloud +UniApp +MySql
智慧工地管理云平台系统,智慧工地全套源码,java版智慧工地源码,支持PC端、大屏端、移动端。 智慧工地聚焦建筑行业的市场需求,提供“平台网络终端”的整体解决方案,提供劳务管理、视频管理、智能监测、绿色施工、安全管…...

在HarmonyOS ArkTS ArkUI-X 5.0及以上版本中,手势开发全攻略:
在 HarmonyOS 应用开发中,手势交互是连接用户与设备的核心纽带。ArkTS 框架提供了丰富的手势处理能力,既支持点击、长按、拖拽等基础单一手势的精细控制,也能通过多种绑定策略解决父子组件的手势竞争问题。本文将结合官方开发文档,…...

高危文件识别的常用算法:原理、应用与企业场景
高危文件识别的常用算法:原理、应用与企业场景 高危文件识别旨在检测可能导致安全威胁的文件,如包含恶意代码、敏感数据或欺诈内容的文档,在企业协同办公环境中(如Teams、Google Workspace)尤为重要。结合大模型技术&…...

【HTTP三个基础问题】
面试官您好!HTTP是超文本传输协议,是互联网上客户端和服务器之间传输超文本数据(比如文字、图片、音频、视频等)的核心协议,当前互联网应用最广泛的版本是HTTP1.1,它基于经典的C/S模型,也就是客…...
搭建DNS域名解析服务器(正向解析资源文件)
正向解析资源文件 1)准备工作 服务端及客户端都关闭安全软件 [rootlocalhost ~]# systemctl stop firewalld [rootlocalhost ~]# setenforce 0 2)服务端安装软件:bind 1.配置yum源 [rootlocalhost ~]# cat /etc/yum.repos.d/base.repo [Base…...
Chromium 136 编译指南 Windows篇:depot_tools 配置与源码获取(二)
引言 工欲善其事,必先利其器。在完成了 Visual Studio 2022 和 Windows SDK 的安装后,我们即将接触到 Chromium 开发生态中最核心的工具——depot_tools。这个由 Google 精心打造的工具集,就像是连接开发者与 Chromium 庞大代码库的智能桥梁…...

LangFlow技术架构分析
🔧 LangFlow 的可视化技术栈 前端节点编辑器 底层框架:基于 (一个现代化的 React 节点绘图库) 功能: 拖拽式构建 LangGraph 状态机 实时连线定义节点依赖关系 可视化调试循环和分支逻辑 与 LangGraph 的深…...
ui框架-文件列表展示
ui框架-文件列表展示 介绍 UI框架的文件列表展示组件,可以展示文件夹,支持列表展示和图标展示模式。组件提供了丰富的功能和可配置选项,适用于文件管理、文件上传等场景。 功能特性 支持列表模式和网格模式的切换展示支持文件和文件夹的层…...
Matlab实现任意伪彩色图像可视化显示
Matlab实现任意伪彩色图像可视化显示 1、灰度原始图像2、RGB彩色原始图像 在科研研究中,如何展示好看的实验结果图像非常重要!!! 1、灰度原始图像 灰度图像每个像素点只有一个数值,代表该点的亮度(或…...