ROS 自动驾驶多点巡航
ROS 自动驾驶多点巡航:
1、首先创建工作空间:
基于我们的artca_ws;
2、创建功能包:
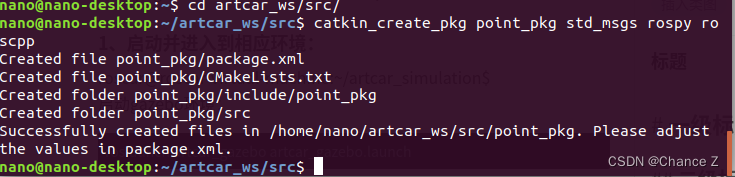
进入src目录,输入命令:
catkin_create_pkg point_pkg std_msgs rospy roscpp
test_pkg 为功能包名,后面两个是依赖;
3、创建python文件
我们通过vscode打开src下功能包:
创建 point.py:
代码内容写入 :
#!/usr/bin/env python
import rospy
import actionlib
import collections
from actionlib_msgs.msg import *
from geometry_msgs.msg import Pose, PoseWithCovarianceStamped, Point, Quaternion, Twist
from move_base_msgs.msg import MoveBaseAction, MoveBaseGoal
from random import sample
from math import pow, sqrt class MultiNav(): def __init__(self): rospy.init_node('MultiNav', anonymous=True) rospy.on_shutdown(self.shutdown) # How long in seconds should the robot pause at each location? self.rest_time = rospy.get_param("~rest_time", 10) # Are we running in the fake simulator? self.fake_test = rospy.get_param("~fake_test", False) # Goal state return values goal_states = ['PENDING', 'ACTIVE', 'PREEMPTED','SUCCEEDED', 'ABORTED', 'REJECTED','PREEMPTING', 'RECALLING', 'RECALLED','LOST'] # Set up the goal locations. Poses are defined in the map frame. # An easy way to find the pose coordinates is to point-and-click # Nav Goals in RViz when running in the simulator. # Pose coordinates are then displayed in the terminal # that was used to launch RViz. locations = collections.OrderedDict() locations['point-1'] = Pose(Point(5.21, -2.07, 0.00), Quaternion(0.000, 0.000, -0.69, 0.72)) locations['point-2'] = Pose(Point(3.50, -5.78, 0.00), Quaternion(0.000, 0.000, 0.99, 0.021))#locations['point-3'] = Pose(Point(-6.95, 2.26, 0.00), Quaternion(0.000, 0.000, 0.000, 1.000))#locations['point-4'] = Pose(Point(-6.50, 2.04, 0.00), Quaternion(0.000, 0.000, 0.000, 1.000))# Publisher to manually control the robot (e.g. to stop it) self.cmd_vel_pub = rospy.Publisher('cmd_vel', Twist, queue_size=5) # Subscribe to the move_base action server self.move_base = actionlib.SimpleActionClient("move_base", MoveBaseAction) rospy.loginfo("Waiting for move_base action server...") # Wait 60 seconds for the action server to become available self.move_base.wait_for_server(rospy.Duration(10)) rospy.loginfo("Connected to move base server") # A variable to hold the initial pose of the robot to be set by the user in RViz initial_pose = PoseWithCovarianceStamped() # Variables to keep track of success rate, running time, and distance traveled n_locations = len(locations) n_goals = 0 n_successes = 0 i = 0 distance_traveled = 0 start_time = rospy.Time.now() running_time = 0 location = "" last_location = "" # Get the initial pose from the user rospy.loginfo("Click on the map in RViz to set the intial pose...") rospy.wait_for_message('initialpose', PoseWithCovarianceStamped) self.last_location = Pose() rospy.Subscriber('initialpose', PoseWithCovarianceStamped, self.update_initial_pose) keyinput = int(input("Input 0 to continue,or reget the initialpose!\n"))while keyinput != 0:rospy.loginfo("Click on the map in RViz to set the intial pose...") rospy.wait_for_message('initialpose', PoseWithCovarianceStamped) rospy.Subscriber('initialpose', PoseWithCovarianceStamped, self.update_initial_pose) rospy.loginfo("Press y to continue,or reget the initialpose!")keyinput = int(input("Input 0 to continue,or reget the initialpose!"))# Make sure we have the initial pose while initial_pose.header.stamp == "": rospy.sleep(1) rospy.loginfo("Starting navigation test") # Begin the main loop and run through a sequence of locations for location in locations.keys(): rospy.loginfo("Updating current pose.") distance = sqrt(pow(locations[location].position.x - initial_pose.pose.pose.position.x, 2) + pow(locations[location].position.y - initial_pose.pose.pose.position.y, 2)) initial_pose.header.stamp = "" # Store the last location for distance calculations last_location = location # Increment the counters i += 1 n_goals += 1 # Set up the next goal location self.goal = MoveBaseGoal() self.goal.target_pose.pose = locations[location] self.goal.target_pose.header.frame_id = 'map' self.goal.target_pose.header.stamp = rospy.Time.now() # Let the user know where the robot is going next rospy.loginfo("Going to: " + str(location)) # Start the robot toward the next location self.move_base.send_goal(self.goal) # Allow 5 minutes to get there finished_within_time = self.move_base.wait_for_result(rospy.Duration(300)) # Check for success or failure if not finished_within_time: self.move_base.cancel_goal() rospy.loginfo("Timed out achieving goal") else: state = self.move_base.get_state() if state == GoalStatus.SUCCEEDED: rospy.loginfo("Goal succeeded!") n_successes += 1 distance_traveled += distance else: rospy.loginfo("Goal failed with error code: " + str(goal_states[state])) # How long have we been running? running_time = rospy.Time.now() - start_time running_time = running_time.secs / 60.0 # Print a summary success/failure, distance traveled and time elapsed rospy.loginfo("Success so far: " + str(n_successes) + "/" + str(n_goals) + " = " + str(100 * n_successes/n_goals) + "%") rospy.loginfo("Running time: " + str(trunc(running_time, 1)) + " min Distance: " + str(trunc(distance_traveled, 1)) + " m") rospy.sleep(self.rest_time) def update_initial_pose(self, initial_pose): self.initial_pose = initial_pose def shutdown(self): rospy.loginfo("Stopping the robot...") self.move_base.cancel_goal() rospy.sleep(2) self.cmd_vel_pub.publish(Twist()) rospy.sleep(1)
def trunc(f, n): # Truncates/pads a float f to n decimal places without rounding slen = len('%.*f' % (n, f)) return float(str(f)[:slen]) if __name__ == '__main__': try: MultiNav() rospy.spin() except rospy.ROSInterruptException: rospy.loginfo("AMCL navigation test finished.") 4、编译:
nano@nano-desktop:~/artcar_ws/src$ cd ..
nano@nano-desktop:~/artcar_ws$ catkin build

5、案例实操;
启动小车并进入到相应环境:
(1)打开终端,启动底盘环境,输入如下命令:
$ roslaunch artcar_nav artcar_bringup.launch
(2)启动导航程序:
$ roslaunch artcar_nav artcar_move_base.launch
(3)启动RVIZ:
(4)获取点位:
rostopic echo /move_base_sile/goal
获取点位
roscar@roscar-virtual-machine:~/artcar_simulation/src$ rostopic echo /move_base_simple/goal
WARNING: no messages received and simulated time is active.
Is /clock being published?
header: seq: 0stamp: secs: 405nsecs: 141000000frame_id: "odom"
pose: position: x: 5.21420097351y: -2.07076597214z: 0.0orientation: x: 0.0y: 0.0z: -0.69109139328w: 0.722767380375
---
header: seq: 1stamp: secs: 422nsecs: 52000000frame_id: "odom"
pose: position: x: 3.50902605057y: -5.78046607971z: 0.0orientation: x: 0.0y: 0.0z: 0.999777096296w: 0.0211129752124
---
(5)修改point.py文件中点位数据的位置:

(6 ) 然后开启终端执行:
nano@nano-desktop:~/artcar_ws/src/point_pkg/src$ ./point.py
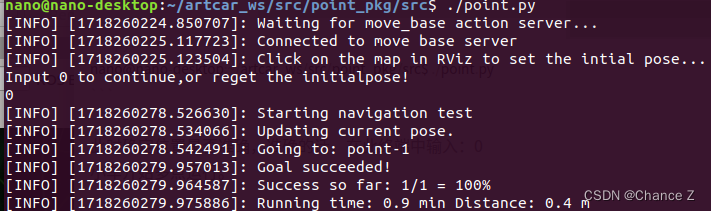
此时确定位置是否准确,准确的话,在此终端中输入:0
小车开始多点运行。
相关文章:
ROS 自动驾驶多点巡航
ROS 自动驾驶多点巡航: 1、首先创建工作空间: 基于我们的artca_ws; 2、创建功能包: 进入src目录,输入命令: catkin_create_pkg point_pkg std_msgs rospy roscpptest_pkg 为功能包名,后面两个是依赖&a…...
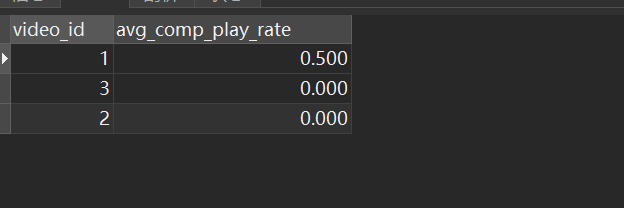
SQL学习,大厂面试真题(1):观看各个视频的平均完播率
各个视频的平均完播率 1、视频信息表 IDAuthorNameCategoryAgeStart Time1张三影视302024-01-01 7:00:002李四美食602024-01-01 7:00:003王麻子旅游902024-01-01 7:00:00 (video_id-视频ID, AuthorName-创作者, tag-类别标签, duration-视频时长(秒&…...
)
2023年全国大学生数学建模竞赛C题蔬菜类商品的自动定价与补货决策(含word论文和源代码资源)
文章目录 一、题目二、word版实验报告和源代码(两种获取方式) 一、题目 2023高教社杯全国大学生数学建模竞赛题目 C题 蔬菜类商品的自动定价与补货决策 在生鲜商超中,一般蔬菜类商品的保鲜期都比较短,且品相随销售时间的增加而…...
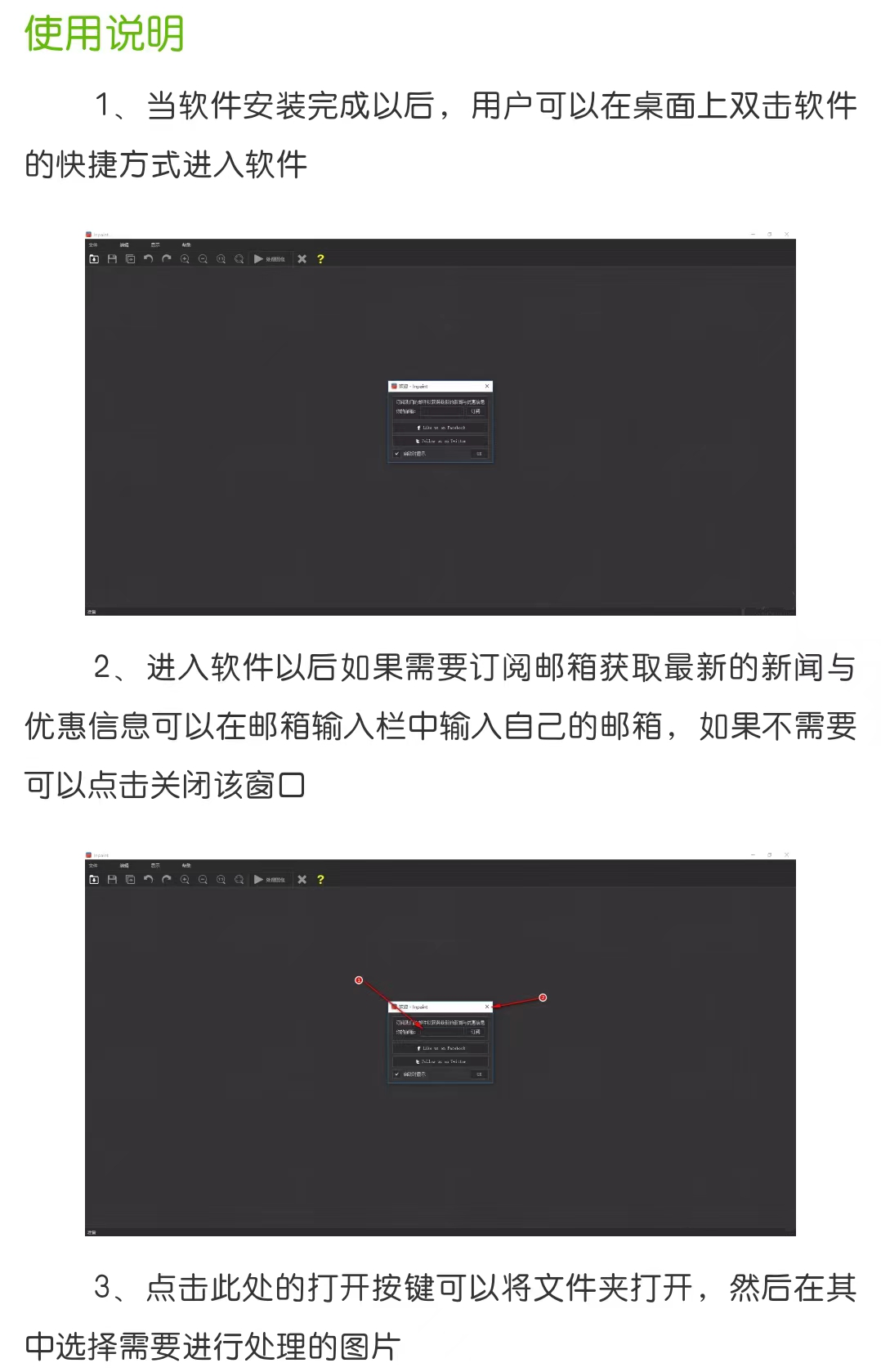
inpaint下载安装2024-inpaint软件安装包下载v5.0.6官网最新版附加详细安装步骤
Inpaint软件最新版是一款功能强大的图片去水印软件,这款软件拥有强大的智能算法,能够根据照片的背景为用户去除照片中的各种水印,并修补好去除水印后的图片。并且软件操作简单、界面清爽,即使是修图新手也能够轻松上手,…...

分享三个仓库
Hello , 我是恒。大概有半个月没有发文章了,都写在文档里了 今天分享三个我开源的项目,比较小巧但是有用 主页 文档导航 Github地址: https://github.com/lmliheng/document 在线访问:http://document.liheng.work/ 里面有各种作者书写的文档ÿ…...

MacOS - 启动台多了个『卸载 Adobe Photoshop』
问题描述 今天安装好了 Adobe Ps,但是发现启动台多了个『卸载 Adobe Photoshop』强迫症又犯了,想把它干掉! 解决方案 打开访达 - 前往 - 资源库,搜索要卸载的名字就可以看到,然后移除到垃圾筐...

PHP 日期处理完全指南
PHP 日期处理完全指南 引言 在PHP开发中,日期和时间处理是一个常见且重要的任务。PHP提供了丰富的内置函数来处理日期和时间,包括日期的格式化、计算、解析等。本文将详细介绍PHP中日期处理的相关知识,帮助读者全面理解和掌握这一技能。 1. PHP日期函数基础 1.1 date()函…...
KVB:怎么样选择最优交易周期?
摘要 在金融交易中,周期的选择是影响交易成败的重要因素之一。不同的交易周期对应不同的市场环境和交易策略,选择合适的周期可以提高交易的成功率。本文将详细探讨交易中如何选择最优周期,包括短周期、中周期和长周期的特点及适用情况&#…...

前端面试题日常练-day69 【面试题】
题目 希望这些选择题能够帮助您进行前端面试的准备,答案在文末 TypeScript中,以下哪个关键字用于声明一个变量的类型为联合类型? a) union b) any c) all d) | 在TypeScript中,以下哪个符号用于声明一个变量的类型为对象类型&am…...
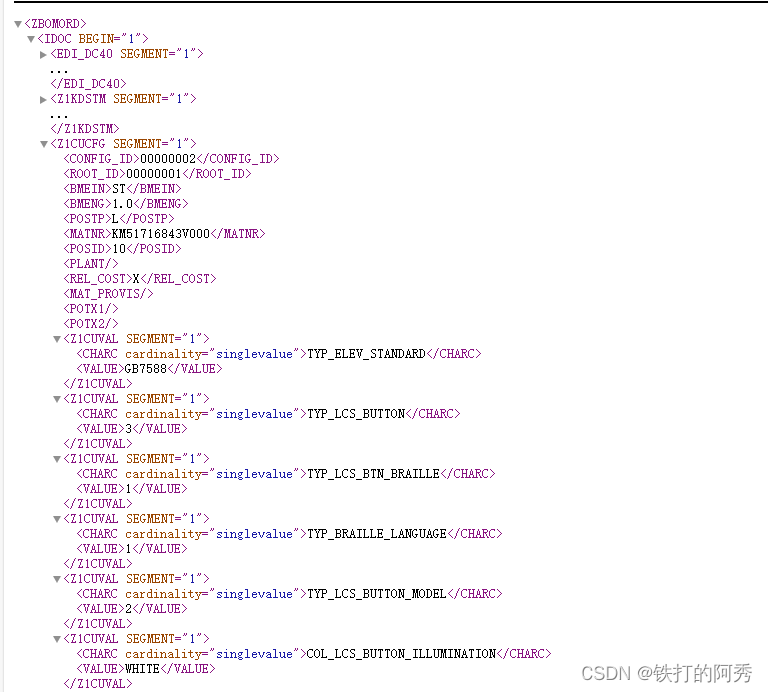
Java 解析xml文件-工具类
Java 解析xml文件-工具类 简述 Java解析xml文件,对应的Javabean是根据xml中的节点来创建,如SeexmlZbomord、SeexmlIdoc等等 工具类代码 import cn.hutool.core.io.FileUtil; import com.alibaba.cloud.commons.io.IOUtils; import com.seexml.bom.Se…...
PyQt5学习系列之新项目创建并使用widget
PyQt5学习系列之新项目创建并使用widget 前言报错新建项目程序完整程序总结 前言 新建项目,再使用ui转py,无论怎么样都打不开py文件,直接报错。 报错 Connected to pydev debugger (build 233.11799.298)新建项目程序 # Press ShiftF10 to…...
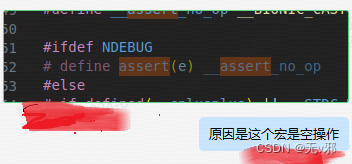
mtk8675 安卓端assert函数的坑
8675 安卓端, assert(pthread_mutex_init(&mutex_data_, &mattr) 0);用这行代码发现pthread_mutex_init函数没有被调用,反汇编发现不光没调用assert,pthread_mutex_init也没调用。直接pthread_mutex_init(&mutex_data_, &ma…...

编程入门笔记:从基础到进阶的探索之旅
编程入门笔记:从基础到进阶的探索之旅 编程,作为现代科技的基石,正日益渗透到我们生活的方方面面。对于初学者来说,掌握编程技能不仅有助于提升解决问题的能力,还能开启通往创新世界的大门。本篇文章将从四个方面、五…...

小规模自建 Elasticsearch 的部署及优化
本文将详细介绍如何在 CentOS 7 操作系统上部署并优化 Elasticsearch 5.3.0,以承载千万级后端服务的数据采集。要使用Elasticsearch至少需要三台独立的服务器,本文所用服务器配置为4核8G的ECS云服务器,其中一台作为 master + data 节点、一台作为 client + data 节点、最后一…...
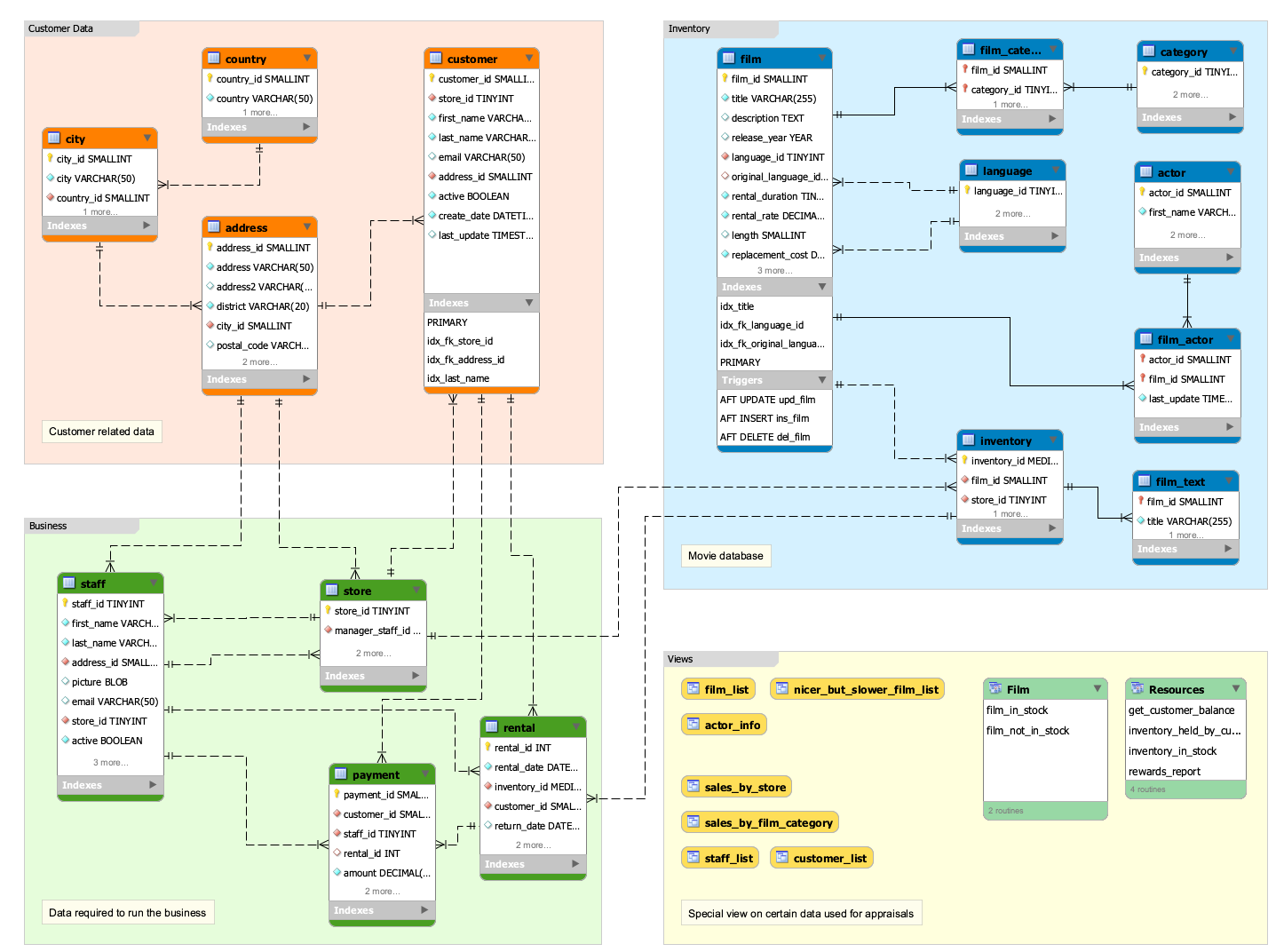
MySQL 示例数据库大全
前言: 我们练习 SQL 时,总会自己创造一些测试数据或者网上找些案例来学习,其实 MySQL 官方提供了好几个示例数据库,在 MySQL 的学习、开发和实践中具有非常重要的作用,能够帮助初学者更好地理解和应用 MySQL 的各种功…...
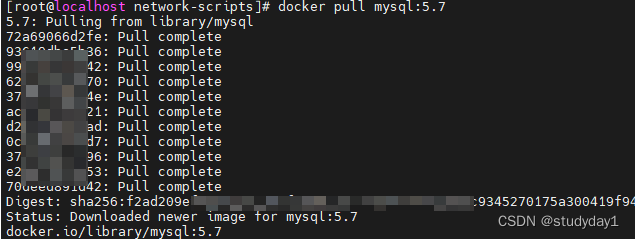
VirtualBox、Centos7下安装docker后pull镜像问题、ftp上传文件问题
Docker安装篇(CentOS7安装)_docker 安装 centos7-CSDN博客 首先,安装docker可以根据这篇文章进行安装,安装完之后,我们就需要去通过docker拉取相关的服务镜像,然后安装相应的服务容器,比如我们通过docker来安装mysql,…...

链表 题目汇总
237. 删除链表中的节点...

grafana连接influxdb2.x做数据大盘
连接influxdb 展示数据 新建仪表盘 选择存储库 设置展示...

Java证件识别中的身份证识别接口
现如今,越来越多的互联网应用需要对身份证进行实名认证,但不知道大家有没有发现,从最初的手动录入身份证信息转变到了现在的图片上传自动识别呢?其实,这都是因为集成了身份证识别接口功能,今天,…...

迷你小风扇哪个品牌好?迷你小风扇前十名公开揭晓!
随着夏日的炎热袭来,迷你小风扇成为了许多人随身携带的清凉利器。无论是在办公室、户外活动,还是在旅行途中,迷你小风扇都以其小巧便携、强劲风力和持久续航的优势,迅速俘获了大批用户的喜爱。然而,市面上迷你小风扇品…...

Degrees of Lewdity中文本地化版本完全指南:从安装到精通
Degrees of Lewdity中文本地化版本完全指南:从安装到精通 【免费下载链接】Degrees-of-Lewdity-Chinese-Localization Degrees of Lewdity 游戏的授权中文社区本地化版本 项目地址: https://gitcode.com/gh_mirrors/de/Degrees-of-Lewdity-Chinese-Localization …...

塔罗牌选框架:准确率超机器学习模型
技术选型困境与创新突破在软件测试领域,技术栈选择一直是核心挑战。传统方法依赖历史数据和机器学习模型,但常陷入“预测陷阱”——过度依赖过往经验导致创新盲区。例如,自动化测试框架的错误选型每年造成巨额损失:38.7%源于技术生…...

FFXIV国际服中文补丁解决方案:零基础上手实战指南
FFXIV国际服中文补丁解决方案:零基础上手实战指南 【免费下载链接】FFXIVChnTextPatch 项目地址: https://gitcode.com/gh_mirrors/ff/FFXIVChnTextPatch 你是否曾在《最终幻想XIV》国际服中因语言障碍错失关键剧情?是否因英文界面降低了游戏沉浸…...

Spring Boot 集成云快充协议:充电桩接入平台完整Demo
云快充协议云快充1.5协议云快充1.6云快充协议开源代码云快充底层协议云快充桩直连桩直连协议充电桩协议云快充源码介绍云快充协议云快充1.5协议云快充1.6云快充协议开源代码云快充底层协议云快充桩直连桩直连协议充电桩协议云快充源码软件架构1、提供云快充底层桩直连协议&…...

如何快速配置HomeAssistant格力空调本地控制组件:完整操作指南
如何快速配置HomeAssistant格力空调本地控制组件:完整操作指南 【免费下载链接】HomeAssistant-GreeClimateComponent Custom Gree climate component written in Python3 for Home Assistant. Controls ACs supporting the Gree protocol. 项目地址: https://git…...
)
Python+Mediamtx实战:5分钟搞定WebRTC视频流帧捕获(附完整代码)
PythonMediamtx实战:5分钟搞定WebRTC视频流帧捕获(附完整代码) 在实时视频处理领域,WebRTC技术因其低延迟和点对点传输特性而备受青睐。本文将带你快速搭建一个基于Mediamtx流媒体服务器和Python的WebRTC视频帧捕获系统࿰…...

League-Toolkit:英雄联盟智能工具集如何解决游戏决策与操作痛点并提升玩家体验
League-Toolkit:英雄联盟智能工具集如何解决游戏决策与操作痛点并提升玩家体验 【免费下载链接】League-Toolkit 兴趣使然的、简单易用的英雄联盟工具集。支持战绩查询、自动秒选等功能。基于 LCU API。 项目地址: https://gitcode.com/gh_mirrors/le/League-Tool…...

Revolut警告支持高耗能AI和加密货币业务可能面临声誉风险
英国银行应用Revolut表示,由于支持加密货币和AI等高耗能行业,公司可能面临声誉风险,同时该公司公布去年利润增长57%。这家金融科技公司在等待监管批准五年后,现在终于可以作为正式的英国银行启动业务。Revolut在其2025年年报中警告…...

Axure RP中文语言包:3分钟快速汉化你的原型设计工具
Axure RP中文语言包:3分钟快速汉化你的原型设计工具 【免费下载链接】axure-cn Chinese language file for Axure RP. Axure RP 简体中文语言包,不定期更新。支持 Axure 9、Axure 10。 项目地址: https://gitcode.com/gh_mirrors/ax/axure-cn 对于…...

TWS耳机充电仓硬件设计全解析:从Type-C接口到NTC保护的7大核心模块
TWS耳机充电仓硬件设计全解析:从Type-C接口到NTC保护的7大核心模块 当你在咖啡馆掏出AirPods时,可能不会想到那个小巧的充电仓里藏着多少精密电路。作为硬件工程师,我们眼中的充电仓不是简单的塑料盒子,而是一个由七大核心模块组成…...