在公司的一些笔记
6.19
- 记住挂载在windows上的账户是DAHUATECH\401593,不是401593
- Windows与linux不能同时挂载在虚拟盘上
6.21
/*******************************************************************************
pdc_ledSy7806e.c*
* Description: 提供I2C访问sy7806e。
*
* 1. 硬件说明。
*
* 2. 程序结构说明。
*
* 3. 使用说明。
*
* 4. 局限性说明。
* ……
* 5. 其他说明。
* ……
*
* Modification:
* Date : 2023-12-11
* Revision:
* Author :
* Contents:
*******************************************************************************//* ========================================================================== */
/* 头文件区 */
/* ========================================================================== */#include "osa.h"
#include "prc.h"
#include "pdc.h"
#include "pdc_priv.h"
#include "pdc_ledI2cpriv.h"
#include "pdc_ledSy7806e.h"static Uint32 value_1 = 0x0;
/* ========================================================================== */
/* 函数声明区 */
/* ========================================================================== *//* ========================================================================== */
/* 全局变量定义区 */
/* ========================================================================== *//* Pca9534控制结构体 */
typedef struct
{OSA_MutexHandle hLock;
} Sy7806e_Obj;Int32 LED_sy7806eI2cRead(PRC_I2cDevHandle hI2cDev, Uint32 addr, Uint32 *value)
{PRC_I2cXferParams xferParams[2];Uint8 txbuf[1];Uint8 rxbuf[1];txbuf[0] = addr;if (NULL == value){return OSA_EFAIL;}xferParams[0].pBuffer = txbuf;xferParams[0].bufLen = 1;xferParams[0].flags = 0;xferParams[0].dataBits = 8;xferParams[0].timeout = 1000;xferParams[1].pBuffer = rxbuf;xferParams[1].bufLen = 1;xferParams[1].flags = PRC_I2C_RD;xferParams[1].dataBits = 8;xferParams[1].timeout = 1000;if (OSA_isNull(hI2cDev)){ OSA_DEBUG("SY7806E_READ hi2cDev is NULL\n");return OSA_EFAIL;}if (PRC_i2cTransfer(hI2cDev, xferParams, 2) < 0){OSA_ERROR("Fail to read\n");return OSA_EFAIL;}else{OSA_memCpySize(value, rxbuf, sizeof(rxbuf));}return OSA_SOK;
}Int32 LED_sy7806eI2cWrite(PRC_I2cDevHandle hI2cDev, Uint32 addr, Uint32 value)
{PRC_I2cXferParams xferParams;Uint8 txbuf[2];txbuf[0] = addr;txbuf[1] = value;xferParams.pBuffer = txbuf;xferParams.bufLen = 2;xferParams.flags = 0;xferParams.dataBits = 8;xferParams.timeout = 1000;if (PRC_i2cTransfer(hI2cDev, &xferParams, 1) < 0){OSA_ERROR("Fail to write\n");return OSA_EFAIL;}return OSA_SOK;
}
/*******************************************************************************
* 函数名 : CE_MCUI2C_i2cInit
* 描 述 : 初始化I2C通讯
* 输 入 : -pstObj : MCUI2C_ObjModule对象
* 输 出 : 无。
* 返回值 : OSA_SOK : 成功OSA_EFAIL : 失败
*******************************************************************************/Int32 LED_sy7806eI2cInit(PRC_I2cDevHandle hI2cDev)
{Int32 status = 0;if(!hI2cDev){OSA_ERROR("LED_sy7806eI2cInit error, hI2cDev is null\n");return OSA_EFAIL;}value_1 = 0xa0;return OSA_SOK;}/*******************************************************************************
* 函数名 : CE_MCUI2C_i2cInit
* 描 述 : 初始化I2C通讯
* 输 入 : -pstObj : MCUI2C_ObjModule对象
* 输 出 : 无。
* 返回值 : OSA_SOK : 成功OSA_EFAIL : 失败
*******************************************************************************/
Int32 LED_sy7806eI2cSetState(PRC_I2cDevHandle hI2cDev, PDC_LedSetParams *pLedParams)
{static Int32 tempcode = 0;//一次初始化
/*出现连续两条相同命令时不需要进行操作,tempcode不需要更新*/if (pLedParams->code == tempcode){return OSA_SOK;}#define ILL_SUM 168Int32 status = 0;Int32 pValue = 0;if((!hI2cDev) || (!pLedParams)){OSA_ERROR("LED_sy7806eI2cSetState error, hI2cDev or pLedParams is null\n");}// LED_sy7806eI2cRead(hI2cDev, 0x4, &pValue);//中间态过渡,不能直接设置灯的模式不然灯反应过慢pValue = pValue & ~(0x3 << 2);//2.3.0pValue = pValue | (0x2 << 2);//3.1pValue = pValue & ~(0x1 << 5);//5.0pValue = pValue | (0x0 << 5);//4.0pValue &= !0x3; // 0.1.0LED_sy7806eI2cWrite(hI2cDev, 0x1, pValue); //使能寄存器/*频闪使用IR模式*/if(pLedParams->state == LED_STATE_ON) //常亮的预设值{value_1 = value_1 & ~(0x3 << 2);//2.3 0value_1 = value_1 | (0x2 << 2);//3 1value_1 = value_1 & ~(0x1 << 5);//5 0value_1 = value_1 | (0x0 << 5);}else if(pLedParams->state == LED_STATE_FLASH)//频闪预设置{value_1 = value_1 & ~(0x3 << 2); // IR modevalue_1 = value_1 | (0x1 << 2); //2 1 ???value_1 = value_1 & ~(0x1 << 5);// 5 0value_1 = value_1 | (0x1 << 5);//5 1}switch (pLedParams->code)//亮度的设置{case LED_White_left_I2C:case LED_Red_left_I2C:if(!pLedParams->illuminance || LED_STATE_OFF == pLedParams->state)//亮度为0,灯状态为0{value_1 = value_1 & ~(0x1 << 0);//关LED1}else//灯亮{value_1 = value_1 | (0x1 << 0);//开LED1if(LED_STATE_FLASH == pLedParams->state){LED_sy7806eI2cRead(hI2cDev, 0x4, &pValue);//读取LED2频闪值/*频闪的时候LED1+LED2电流不能过大*/if((pValue&0x7f) + (pLedParams->illuminance&0x7f) >= ILL_SUM) //2000mA / 11.725 - 2 = 168 {pLedParams->illuminance = ILL_SUM - (pValue&0x7f);}LED_sy7806eI2cWrite(hI2cDev, 0x3, pLedParams->illuminance);//LED1 频闪}else if(LED_STATE_ON == pLedParams->state){LED_sy7806eI2cWrite(hI2cDev, 0x5, pLedParams->illuminance);//控制LED1常亮模式的亮度}}break;case LED_White_right_I2C:case LED_Red_right_I2C:if(!pLedParams->illuminance || LED_STATE_OFF == pLedParams->state)//亮度为0或者关灯{value_1 = value_1 & ~(0x1 << 1);//关LED2}else{value_1 = value_1 | (0x1 << 1);//开LED2/*频闪的时候LED1+LED2电流不能过大*/if(LED_STATE_FLASH == pLedParams->state)//控制LED2频闪模式亮度{LED_sy7806eI2cRead(hI2cDev, 0x3, &pValue); //读取LED1频闪的值if((pValue&0x7f) + (pLedParams->illuminance&0x7f) >= ILL_SUM) //2000ms / 11.725 - 2 = 168 {pLedParams->illuminance = ILL_SUM - (pValue&0x7f);}LED_sy7806eI2cWrite(hI2cDev, 0x4, pLedParams->illuminance);}else if(LED_STATE_ON == pLedParams->state)//控制LED2常亮模式亮度{LED_sy7806eI2cWrite(hI2cDev, 0x6, pLedParams->illuminance);}}break;default:break;};LED_sy7806eI2cWrite(hI2cDev, 0x1, value_1); //模式的设置tempcode = pLedParams->code ;//存放上一条执行过的命令,tempcode更新return OSA_SOK;}
/*******************************************************************************
* 函数名 : CE_MCUI2C_i2cDeinit
* 描 述 : 反初始化I2C通讯
* 输 入 : -pstObj : MCUI2C_ObjModule对象
* 输 出 : 无。
* 返回值 : OSA_SOK : 成功OSA_EFAIL : 失败
*******************************************************************************/
Int32 LED_sy7806eI2cDeInit(PRC_I2cDevHandle hI2cDev)
{LED_sy7806eI2cWrite(hI2cDev, 0x1, 0x80);return OSA_SOK;
}
6.21
1、打包
2、环境的
3、设置输出
set light 命令
set light 0 2 100 id:模式 (0:关 1亮 2:频闪) 亮度
测试流程1、先将代码写好,记得写打印
2、编译,编译后生成ko文件,在目录Z:\xzj\PDC\Trunk\bin\ambacv28
3、打包
将生成的文件移动到 Z:\xzj\Pack_cv28\Images\user_cv28\lib\modules
另外还缺少库文件 可以看图片中的日期,除了pdc.ko外还有很多文件
使用打包命令,会在打包程序中生成图片中的文件包4、使用tftp传输bin文件到相机中
看图片中的设置使用一个网卡连接到相机,将网卡的ip设置成192.168.100
使用tftp将打包后的镜像文件传输到相机中
5、使用命令set 对相机进行操作
/*******************************************************************************
pdc_ledSy7806e.c*
* Description: 提供I2C访问sy7806e。
*
* 1. 硬件说明。
*
* 2. 程序结构说明。
*
* 3. 使用说明。
*
* 4. 局限性说明。
* ……
* 5. 其他说明。
* ……
*
* Modification:
* Date : 2023-12-11
* Revision:
* Author :
* Contents:
*******************************************************************************//* ========================================================================== */
/* 头文件区 */
/* ========================================================================== */#include "osa.h"
#include "prc.h"
#include "pdc.h"
#include "pdc_priv.h"
#include "pdc_ledI2cpriv.h"
#include "pdc_ledSy7806e.h"static Uint32 value_1 = 0x0;
/* ========================================================================== */
/* 函数声明区 */
/* ========================================================================== *//* ========================================================================== */
/* 全局变量定义区 */
/* ========================================================================== *//* Pca9534控制结构体 */
typedef struct
{OSA_MutexHandle hLock;
} Sy7806e_Obj;Int32 LED_sy7806eI2cRead(PRC_I2cDevHandle hI2cDev, Uint32 addr, Uint32 *value)
{PRC_I2cXferParams xferParams[2];Uint8 txbuf[1];Uint8 rxbuf[1];txbuf[0] = addr;if (NULL == value){return OSA_EFAIL;}xferParams[0].pBuffer = txbuf;xferParams[0].bufLen = 1;xferParams[0].flags = 0;xferParams[0].dataBits = 8;xferParams[0].timeout = 1000;xferParams[1].pBuffer = rxbuf;xferParams[1].bufLen = 1;xferParams[1].flags = PRC_I2C_RD;xferParams[1].dataBits = 8;xferParams[1].timeout = 1000;if (OSA_isNull(hI2cDev)){ OSA_DEBUG("SY7806E_READ hi2cDev is NULL\n");return OSA_EFAIL;}if (PRC_i2cTransfer(hI2cDev, xferParams, 2) < 0){OSA_ERROR("Fail to read\n");return OSA_EFAIL;}else{OSA_memCpySize(value, rxbuf, sizeof(rxbuf));}return OSA_SOK;
}Int32 LED_sy7806eI2cWrite(PRC_I2cDevHandle hI2cDev, Uint32 addr, Uint32 value)
{PRC_I2cXferParams xferParams;Uint8 txbuf[2];txbuf[0] = addr;txbuf[1] = value;xferParams.pBuffer = txbuf;xferParams.bufLen = 2;xferParams.flags = 0;xferParams.dataBits = 8;xferParams.timeout = 1000;if (PRC_i2cTransfer(hI2cDev, &xferParams, 1) < 0){OSA_ERROR("Fail to write\n");return OSA_EFAIL;}return OSA_SOK;
}
/*******************************************************************************
* 函数名 : CE_MCUI2C_i2cInit
* 描 述 : 初始化I2C通讯
* 输 入 : -pstObj : MCUI2C_ObjModule对象
* 输 出 : 无。
* 返回值 : OSA_SOK : 成功OSA_EFAIL : 失败
*******************************************************************************/Int32 LED_sy7806eI2cInit(PRC_I2cDevHandle hI2cDev)
{Int32 status = 0;if(!hI2cDev){OSA_ERROR("LED_sy7806eI2cInit error, hI2cDev is null\n");return OSA_EFAIL;}value_1 = 0xa0;return OSA_SOK;}/*******************************************************************************
* 函数名 : CE_MCUI2C_i2cInit
* 描 述 : 初始化I2C通讯
* 输 入 : -pstObj : MCUI2C_ObjModule对象
* 输 出 : 无。
* 返回值 : OSA_SOK : 成功OSA_EFAIL : 失败
*******************************************************************************/
Int32 LED_sy7806eI2cSetState(PRC_I2cDevHandle hI2cDev, PDC_LedSetParams *pLedParams)
{static Int32 tempcode = 0;//一次初始化
/*出现连续两条相同命令时不需要进行操作,tempcode不需要更新*/if (pLedParams->code == tempcode){return OSA_SOK;}#define ILL_SUM 168Int32 status = 0;Int32 pValue = 0;if((!hI2cDev) || (!pLedParams)){OSA_ERROR("LED_sy7806eI2cSetState error, hI2cDev or pLedParams is null\n");}// LED_sy7806eI2cRead(hI2cDev, 0x4, &pValue);//中间态过渡,不能直接设置灯的模式不然灯反应过慢pValue = pValue & ~(0x3 << 2);//2.3.0pValue = pValue | (0x2 << 2);//3.1pValue = pValue & ~(0x1 << 5);//5.0pValue = pValue | (0x0 << 5);//4.0pValue &= !0x3; // 0.1.0LED_sy7806eI2cWrite(hI2cDev, 0x1, pValue); //使能寄存器/*频闪使用IR模式*/if(pLedParams->state == LED_STATE_ON) //常亮的预设值{value_1 = value_1 & ~(0x3 << 2);//2.3 0value_1 = value_1 | (0x2 << 2);//3 1value_1 = value_1 & ~(0x1 << 5);//5 0value_1 = value_1 | (0x0 << 5);}else if(pLedParams->state == LED_STATE_FLASH)//频闪预设置{value_1 = value_1 & ~(0x3 << 2); // IR modevalue_1 = value_1 | (0x1 << 2); //2 1 ???value_1 = value_1 & ~(0x1 << 5);// 5 0value_1 = value_1 | (0x1 << 5);//5 1}switch (pLedParams->code)//模式设置{case LED_White_left_I2C:case LED_Red_left_I2C:if(!pLedParams->illuminance || LED_STATE_OFF == pLedParams->state)//亮度为0,灯状态为0{value_1 = value_1 & ~(0x1 << 0);//关LED1}else//灯亮{value_1 = value_1 | (0x1 << 0);//开LED1if(LED_STATE_FLASH == pLedParams->state){LED_sy7806eI2cRead(hI2cDev, 0x4, &pValue);//读取LED2频闪值/*频闪的时候LED1+LED2电流不能过大*/if((pValue&0x7f) + (pLedParams->illuminance&0x7f) >= ILL_SUM) //2000mA / 11.725 - 2 = 168 {pLedParams->illuminance = ILL_SUM - (pValue&0x7f);}LED_sy7806eI2cWrite(hI2cDev, 0x3, pLedParams->illuminance);//LED1 频闪}else if(LED_STATE_ON == pLedParams->state){LED_sy7806eI2cWrite(hI2cDev, 0x5, pLedParams->illuminance);//控制LED1常亮模式的亮度}}break;case LED_White_right_I2C:case LED_Red_right_I2C:if(!pLedParams->illuminance || LED_STATE_OFF == pLedParams->state)//亮度为0或者关灯{value_1 = value_1 & ~(0x1 << 1);//关LED2}else{value_1 = value_1 | (0x1 << 1);//开LED2/*频闪的时候LED1+LED2电流不能过大*/if(LED_STATE_FLASH == pLedParams->state)//控制LED2频闪模式亮度{LED_sy7806eI2cRead(hI2cDev, 0x3, &pValue); //读取LED1频闪的值if((pValue&0x7f) + (pLedParams->illuminance&0x7f) >= ILL_SUM) //2000ms / 11.725 - 2 = 168 {pLedParams->illuminance = ILL_SUM - (pValue&0x7f);}LED_sy7806eI2cWrite(hI2cDev, 0x4, pLedParams->illuminance);}else if(LED_STATE_ON == pLedParams->state)//控制LED2常亮模式亮度{LED_sy7806eI2cWrite(hI2cDev, 0x6, pLedParams->illuminance);}}break;default:break;};LED_sy7806eI2cWrite(hI2cDev, 0x1, value_1);tempcode = pLedParams->code ;//存放上一条执行过的命令,tempcode更新return OSA_SOK;}
/*******************************************************************************
* 函数名 : CE_MCUI2C_i2cDeinit
* 描 述 : 反初始化I2C通讯
* 输 入 : -pstObj : MCUI2C_ObjModule对象
* 输 出 : 无。
* 返回值 : OSA_SOK : 成功OSA_EFAIL : 失败
*******************************************************************************/
Int32 LED_sy7806eI2cDeInit(PRC_I2cDevHandle hI2cDev)
{LED_sy7806eI2cWrite(hI2cDev, 0x1, 0x80);return OSA_SOK;
}
/*******************************************************************************
* pdc_led.c
*
* Copyright (C) 2011-2013 ZheJiang Dahua Technology CO.,LTD.
*
* Author : Huang Zhendi <huang_zhendi@dahuatech.com>
* Yang Zhiqiang <yang_zhiqiang@dahuatech.com>
* Version: V1.0.0 2012-05-21 Create
*
* Description: 提供设备中LED控制功能
* 1. 硬件说明。
* 提供LED控制功能
*
* 2. 程序结构说明。
* 通过字符设备PDC_MISC_NAME的ioctl命令与应用通信。
*
* 3. 使用说明。
* 应用字符设备PDC_MISC_NAME的ioctl命令读写告警。
*
* 4. 局限性说明。
* ……
* 5. 其他说明。
* ……
* Modification:
* Date : 2012.10.26
* Revision:
* Author : huang_zhendi
* Contents:
*******************************************************************************//* ========================================================================== */
/* 头文件区 */
/* ========================================================================== */#include "osa.h"
#include "prc.h"
#include "pdc_priv.h"/* ========================================================================== */
/* 宏和类型定义区 */
/* ========================================================================== */#define LED_TURN_CYCLES 100 /* LED灯状态查询周期,单位是毫秒。*//* ========================================================================== */
/* 数据结构定义区 */
/* ========================================================================== */typedef struct
{Uint16 turnType; /* LED灯亮灯模式: 0-不闪烁 1-闪烁 *//* 以下参数在LED为闪烁时有效 *//* 记录LED灯亮灯时的状态,双色灯,1-绿色,2-黄色,3-红色; 单色灯: 1*/Uint16 state;Uint16 currState; /* LED灯当前状态 0-灭 1-亮 */Uint16 reserved;Uint32 turnOnTime; /* 闪烁时的亮灯时间 */Uint32 turnOffTime; /* 闪烁时的灭灯时间 */Uint32 remainTime; /* 闪灯剩余时间 */
} LED_State;/* LED控制结构体 */
typedef struct
{Uint32 ledCfgNum; /* LED灯配置个数 */PDC_LedCfg *pLedCfg; /* 指向LED灯控制配置。*/LED_State *pLedState; /* 保存定时器状态数组 */OSA_ThrHandle hLedCheckThr; /* LED灯亮灭查询控制线程句柄 */OSA_MutexHandle hLedMutex; /* 保护Led灯信息MISC_GpioInfo->pLedCfg */Uint32 flashLightNum;PRC_PwmHandle hPwm[PDC_PWM_MAX];PRC_PwmInitParams initParams[PDC_PWM_MAX];PRC_DacInitParams initParams_dac[PDC_DAC_MAX];PRC_I2cDevInitParams initParams_i2c[PDC_I2C_MAX];PRC_I2cDevHandle hI2c[PDC_I2C_MAX];I2C_LED_CbParams cbParams[PDC_I2C_MAX];/* 当该标志置1,标志LED已经被强制全部灭掉。 */Uint32 closeAll;
} LED_Obj;/* ========================================================================== */
/* 函数申明区 */
/* ========================================================================== *//* ========================================================================== */
/* 全局变量定义区 */
/* ========================================================================== *//* LED控制结构体 */
static LED_Obj gLedObj;/* ========================================================================== */
/* 函数定义区 */
/* ========================================================================== *//*******************************************************************************
* 函数名 : LED_set
* 描 述 : 设置LED状态
* 输 入 : pLeds: LED灯控制结构体
* state: 单色灯: 0-关闭, 1-点亮
* 双色灯: 0-关闭,1-绿色,2-黄色,3-红色
* 输 出 : 无。
* 返回值 : OSA_EFAIL: 失败
* OSA_SOK : 成功
*******************************************************************************/
static void LED_set(PDC_LedCfg *pLeds, Uint32 state)
{if (pLeds->ledSetWay >= PDC_LED_SET_WAY_NR){OSA_ERROR("can not support this led set way!\n");return ;}/* 两个管脚均有效,则为双色灯。*/if (pLeds->gpioCfg2 != PDC_CFG_GPIO_INVA){switch (state){case 0:if (pLeds->level == 1){PRC_gpioSetLevel(pLeds->gpioCfg1, 1);PRC_gpioSetLevel(pLeds->gpioCfg2, 1);}else{PRC_gpioSetLevel(pLeds->gpioCfg1, 0);PRC_gpioSetLevel(pLeds->gpioCfg2, 0);}break;case 1:if (pLeds->level == 1){PRC_gpioSetLevel(pLeds->gpioCfg1, 1);PRC_gpioSetLevel(pLeds->gpioCfg2, 0);}else{PRC_gpioSetLevel(pLeds->gpioCfg1, 0);PRC_gpioSetLevel(pLeds->gpioCfg2, 1);}break;case 2:if (pLeds->level == 1){PRC_gpioSetLevel(pLeds->gpioCfg1, 0);PRC_gpioSetLevel(pLeds->gpioCfg2, 0);}else{PRC_gpioSetLevel(pLeds->gpioCfg1, 1);PRC_gpioSetLevel(pLeds->gpioCfg2, 1);}break;case 3:if (pLeds->level == 1){PRC_gpioSetLevel(pLeds->gpioCfg1, 0);PRC_gpioSetLevel(pLeds->gpioCfg2, 1);}else{PRC_gpioSetLevel(pLeds->gpioCfg1, 1);PRC_gpioSetLevel(pLeds->gpioCfg2, 0);}break;default:OSA_ERROR("Invalid LED state\n");break;}}else{OSA_DEBUG("LED:gpioCfg:%d ,gpioCfg1:%d \n" ,pLeds->gpioCfg1, !state);switch (state){case 0: // 关if (pLeds->level == 1){PRC_gpioSetLevel(pLeds->gpioCfg1, 1);}else{PRC_gpioSetLevel(pLeds->gpioCfg1, 0);}break;case 1: // 开if (pLeds->level == 1){PRC_gpioSetLevel(pLeds->gpioCfg1, 0);}else{PRC_gpioSetLevel(pLeds->gpioCfg1, 1);}break;case 2: // 频闪,直接走turnOn模式break;case 3: // 闪一次if (pLeds->level == 1){PRC_gpioSetLevel(pLeds->gpioCfg1, 0);OSA_msleep(20);PRC_gpioSetLevel(pLeds->gpioCfg1, 1);}else{PRC_gpioSetLevel(pLeds->gpioCfg1, 1);OSA_msleep(20);PRC_gpioSetLevel(pLeds->gpioCfg1, 0);}break;default:OSA_ERROR("Invalid LED state\n");break;}}
}/*******************************************************************************
* 函数名 : LED_flashLightCreate
* 描 述 : 创建并初始化闪光灯的PWM控制设备
* 输 入 : 无。
* 输 出 : 无。
* 返回值 : OSA_EFAIL: 失败
* OSA_SOK : 成功
*******************************************************************************/
static Int32 LED_flashLightCreate(void)
{Int32 status;PDC_smartIrCfg *pSmartIrCfg = NULL;LED_Obj *pLedObj = &gLedObj;/* 获取SmartIR配置 */status = PDC_cfgGet(PDC_MODULE_SMARTIR, (Ptr *)&pSmartIrCfg);if ( OSA_isFail(status) ){OSA_WARN("Get smartIr cfg failed!\n");return OSA_EFAIL;}pLedObj->flashLightNum = 0;while ((pSmartIrCfg->smartIrType <= PDC_SMARTIR_NR) && (pSmartIrCfg->smartIrType == PDC_SMARTIR_SOCPWM)){if (PDC_IROWNER_SMARTIR == pSmartIrCfg->lightOwner){pSmartIrCfg++;continue;}/* 将读取的配置写入缓存 */pLedObj->initParams[pLedObj->flashLightNum].pwmId = pSmartIrCfg->typeCfg.socPwmCfg.pwmParms.pwmId;pLedObj->initParams[pLedObj->flashLightNum].mode = pSmartIrCfg->typeCfg.socPwmCfg.pwmParms.mode;pLedObj->initParams[pLedObj->flashLightNum].activeLevel= pSmartIrCfg->typeCfg.socPwmCfg.pwmParms.activeLevel;/*第一次引用时创建并使能PWM功能 */status = PRC_pwmCreate(&pLedObj->initParams[pLedObj->flashLightNum], &pLedObj->hPwm[pLedObj->flashLightNum]);if (OSA_isFail(status)){OSA_ERROR("Fail to init PWM%d\n", pLedObj->initParams[pLedObj->flashLightNum].pwmId);return OSA_EFAIL;}status = PRC_pwmDisable(pLedObj->hPwm[pLedObj->flashLightNum]);if(OSA_isFail(status) ){OSA_ERROR("Fail to disable PWM%d.\n", pLedObj->initParams[pLedObj->flashLightNum].pwmId);return OSA_EFAIL;}OSA_INFOCYAN("flashLight init pwmId: %d,mode: %d,activeLevel: %d\n",pLedObj->initParams[pLedObj->flashLightNum].pwmId,pLedObj->initParams[pLedObj->flashLightNum].mode,pLedObj->initParams[pLedObj->flashLightNum].activeLevel);pLedObj->flashLightNum++;pSmartIrCfg++;}return OSA_SOK;
}/*******************************************************************************
* 函数名 : LED_DacLightCreate
* 描 述 : 创建并初始化闪光灯的PWM控制设备
* 输 入 : 无。
* 输 出 : 无。
* 返回值 : OSA_EFAIL: 失败
* OSA_SOK : 成功
*******************************************************************************/
static Int32 LED_DacLightCreate(void)
{Int32 status;PDC_smartIrCfg *pSmartIrCfg = NULL;LED_Obj *pLedObj = &gLedObj;PDC_dacParams pData;/* 获取SmartIR配置 */status = PDC_cfgGet(PDC_MODULE_SMARTIR, (Ptr *)&pSmartIrCfg);if ( OSA_isFail(status) ){OSA_WARN("Get smartIr cfg failed!\n");return OSA_EFAIL;}pLedObj->flashLightNum = 0;while (pSmartIrCfg->smartIrType < PDC_SMARTIR_NR){if (PDC_IROWNER_SMARTIR == pSmartIrCfg->lightOwner){pSmartIrCfg++;continue;}// 将读取的配置写入缓存pLedObj->initParams_dac[pLedObj->flashLightNum].chipId = pSmartIrCfg->typeCfg.dacIrCfg.chipId;pLedObj->initParams_dac[pLedObj->flashLightNum].channel = pSmartIrCfg->typeCfg.dacIrCfg.channel;pLedObj->initParams_dac[pLedObj->flashLightNum].value= pSmartIrCfg->typeCfg.dacIrCfg.activeLevel;pData.chn=pLedObj->initParams_dac[pLedObj->flashLightNum].channel;pData.data=0;//status = PDC_dacOutput(pLedObj->initParams_dac[pLedObj->flashLightNum].chipId,&pData);OSA_INFOCYAN("DacLight init chipId: %d,channel: %d,activeLevel: %d\n",pLedObj->initParams_dac[pLedObj->flashLightNum].chipId,pLedObj->initParams_dac[pLedObj->flashLightNum].channel,pLedObj->initParams_dac[pLedObj->flashLightNum].value);pLedObj->flashLightNum++;pSmartIrCfg++;}return OSA_SOK;
}Int32 PDC_i2cDevRegister(Uint32 ledDevId, I2C_LED_CbParams *pParams)
{OSA_INFO("PDC_i2cDevRegister: ledDevId = %d\n", ledDevId);if (OSA_isNull(pParams)){OSA_ERROR("Null cfg params!\n");return OSA_EFAIL;}switch (ledDevId){case PDC_SY7806E:pParams->LED_i2cInit = LED_sy7806eI2cInit;pParams->LED_i2cSetState = LED_sy7806eI2cSetState;pParams->LED_i2cDeInit = LED_sy7806eI2cDeInit;OSA_INFO("LED device is SY7806E\n");break;default:OSA_ERROR("No suitable LED device, ledDevId=%d\n", ledDevId);return OSA_EFAIL;}return OSA_SOK;
}/*******************************************************************************
* 函数名 : LED_I2cLightCreate
* 描 述 : 创建并初始化闪光灯的I2C控制设备
* 输 入 : 无。
* 输 出 : 无。
* 返回值 : OSA_EFAIL: 失败
* OSA_SOK : 成功
*******************************************************************************/
static Int32 LED_I2cLightCreate(void)
{Int32 status;PDC_smartIrCfg *pSmartIrCfg = NULL;LED_Obj *pLedObj = &gLedObj;PRC_I2cDevInitParams *i2cInitParams;PRC_I2cDevHandle *phI2c;PRC_GpioParams param;/* 获取SmartIR配置 */status = PDC_cfgGet(PDC_MODULE_SMARTIR, (Ptr *)&pSmartIrCfg);if ( OSA_isFail(status) ){OSA_WARN("Get smartIr cfg failed!\n");return OSA_EFAIL;}pLedObj->flashLightNum = 0;while (pSmartIrCfg->smartIrType < PDC_SMARTIR_NR){if (PDC_IROWNER_SMARTIR == pSmartIrCfg->lightOwner){pSmartIrCfg++;continue;}// 将读取的配置写入缓存pLedObj->initParams_i2c[pLedObj->flashLightNum].busId = pSmartIrCfg->typeCfg.i2cIrCfg.busId;pLedObj->initParams_i2c[pLedObj->flashLightNum].opMode = pSmartIrCfg->typeCfg.i2cIrCfg.opMode;pLedObj->initParams_i2c[pLedObj->flashLightNum].address= pSmartIrCfg->typeCfg.i2cIrCfg.address;i2cInitParams = &pLedObj->initParams_i2c[pLedObj->flashLightNum];phI2c = &pLedObj->hI2c[pLedObj->flashLightNum];if (PRC_i2cDevCreate(i2cInitParams, phI2c) < 0){OSA_ERROR("Fail to init I2C%d Device%d\n", i2cInitParams->busId, i2cInitParams->address);return OSA_EFAIL;}OSA_memSet(¶m, 0, sizeof(PRC_GpioParams));param.dir = PRC_GPIO_DIR_OUT;param.mode = PDC_cfgGetGpioMode(pSmartIrCfg->typeCfg.i2cIrCfg.engpio);PRC_gpioGetPin(pSmartIrCfg->typeCfg.i2cIrCfg.engpio, ¶m);PRC_gpioSetLevel(pSmartIrCfg->typeCfg.i2cIrCfg.engpio, pSmartIrCfg->typeCfg.i2cIrCfg.enlevel);OSA_INFOCYAN("I2cLight init busId: %d,opMode: %d,address: 0x%x\n",pLedObj->initParams_i2c[pLedObj->flashLightNum].busId,pLedObj->initParams_i2c[pLedObj->flashLightNum].opMode,pLedObj->initParams_i2c[pLedObj->flashLightNum].address);status = PDC_i2cDevRegister(pSmartIrCfg->typeCfg.i2cIrCfg.address, &pLedObj->cbParams[pLedObj->flashLightNum]);if(status == OSA_SOK){if(pLedObj->cbParams[pLedObj->flashLightNum].LED_i2cInit)pLedObj->cbParams[pLedObj->flashLightNum].LED_i2cInit(*phI2c);elsereturn OSA_EFAIL;}else{PRC_i2cDevDelete(*phI2c);OSA_ERROR("Fail to regist Device 0x%x\n", pSmartIrCfg->typeCfg.i2cIrCfg.address);return OSA_EFAIL;}pLedObj->flashLightNum++;pSmartIrCfg++;}return OSA_SOK;}/*******************************************************************************
* 函数名 : LED_flashLightRelease
* 描 述 : 释放闪光灯的PWM控制设备
* 输 入 : 无。
* 输 出 : 无。
* 返回值 : OSA_EFAIL: 失败
* OSA_SOK : 成功
*******************************************************************************/
static Int32 LED_flashLightRelease(void)
{Int32 status = OSA_SOK;LED_Obj *pLedObj = &gLedObj;Uint32 i;for (i = 0; i < pLedObj->flashLightNum; i++){/*最后一次引用删除时,disable掉PWM接口,并删除PWM控制器*/status = PRC_pwmDisable(pLedObj->hPwm[i]);if( OSA_isFail(status) ){OSA_ERROR("Fail to disable PWM%d.\n",pLedObj->initParams[i].pwmId);return OSA_SOK;}status = PRC_pwmDelete(pLedObj->hPwm[i]);if( OSA_isFail(status) ){OSA_ERROR("Fail to delete PWM%d !\n",pLedObj->initParams[i].pwmId);return OSA_EFAIL;}}return OSA_SOK;
}/*******************************************************************************
* 函数名 : LED_DacLightRelease
* 描 述 : 释放闪光灯的PWM控制设备
* 输 入 : 无。
* 输 出 : 无。
* 返回值 : OSA_EFAIL: 失败
* OSA_SOK : 成功
*******************************************************************************/
static Int32 LED_DacLightRelease(void)
{Int32 status = OSA_SOK;LED_Obj *pLedObj = &gLedObj;Uint32 i;PDC_dacParams pData;for (i = 0; i < pLedObj->flashLightNum; i++){pData.chn=pLedObj->initParams_dac[pLedObj->flashLightNum].channel;pData.data=0;status = PDC_dacOutput(pLedObj->initParams_dac[pLedObj->flashLightNum].chipId,&pData);OSA_INFOCYAN("DacLight init chipId: %d,mode: %d,activeLevel: %d\n",pLedObj->initParams_dac[pLedObj->flashLightNum].chipId,pLedObj->initParams_dac[pLedObj->flashLightNum].channel,pLedObj->initParams_dac[pLedObj->flashLightNum].value);}return OSA_SOK;
}/*******************************************************************************
* 函数名 : LED_I2cLightRelease
* 描 述 : 释放闪光灯的I2C控制设备
* 输 入 : 无。
* 输 出 : 无。
* 返回值 : OSA_EFAIL: 失败
* OSA_SOK : 成功
*******************************************************************************/
static Int32 LED_I2cLightRelease(void)
{Int32 status = OSA_SOK;LED_Obj *pLedObj = &gLedObj;Uint32 i;PRC_I2cDevHandle *phI2c;for (i = 0; i < pLedObj->flashLightNum; i++){phI2c = &pLedObj->hI2c[pLedObj->flashLightNum];if(pLedObj->cbParams[pLedObj->flashLightNum].LED_i2cDeInit)pLedObj->cbParams[pLedObj->flashLightNum].LED_i2cDeInit(*phI2c);PRC_i2cDevDelete(*phI2c);OSA_INFOCYAN("DacLight init chipId: %d,mode: %d,activeLevel: %d\n",pLedObj->initParams_dac[pLedObj->flashLightNum].chipId,pLedObj->initParams_dac[pLedObj->flashLightNum].channel,pLedObj->initParams_dac[pLedObj->flashLightNum].value);}return OSA_SOK;
}/*******************************************************************************
* 函数名 : LED_set
* 描 述 : 设置LED状态
* 输 入 : freq: 频率,详细见prc_pwm.h中相关接口定义
* dutyRation: 占空比,详细见prc_pwm.h中相关接口定义
* 输 出 : 无。
* 返回值 : OSA_EFAIL: 失败
* OSA_SOK : 成功
*******************************************************************************/
static Int32 LED_flashLightSetState(Uint32 id, Uint32 freq, Uint32 dutyRation)
{Int32 status = OSA_SOK;LED_Obj *pLedObj = &gLedObj;OSA_DEBUG("LED_flashLightSetState id %d, freq %d, dutyRation %d\n", id, freq, dutyRation);if(pLedObj->initParams[id].activeLevel == 0){dutyRation = 10000 - dutyRation;}if (0 == freq){freq = 10000;}status = PRC_pwmDisable(pLedObj->hPwm[id]);if(OSA_isFail(status) ){OSA_ERROR("Fail to disable PWM%d.\n", pLedObj->initParams[id].pwmId);return OSA_EFAIL;}status = PRC_pwmSetFreq(pLedObj->hPwm[id], freq);if (OSA_isFail(status)){OSA_ERROR("Fail to set PWM%d ,freq%d\n", pLedObj->initParams[id].pwmId,freq);return OSA_EFAIL;}status = PRC_pwmSetDutyRation(pLedObj->hPwm[id], dutyRation);if (OSA_isFail(status)){OSA_ERROR("Fail to set PWM%d, dutyRation%d\n",pLedObj->initParams[id].pwmId,dutyRation);return OSA_EFAIL;}status = PRC_pwmEnable(pLedObj->hPwm[id]);if (OSA_isFail(status)){OSA_ERROR("Fail to Enable PWM%d\n", pLedObj->initParams[id].pwmId);return OSA_EFAIL;}return OSA_SOK;
}/*******************************************************************************
* 函数名 : LED_ledCheckThead
* 描 述 : LED闪烁检查线程
* 输 入 : pUserArgs: 定时器创建时传入的用户参数
* 输 出 : 无。
* 返回值 : OSA_EFAIL: 失败
* OSA_SOK : 成功
*******************************************************************************/
static Int32 LED_ledCheckThead(Ptr pUserArgs)
{Uint32 i;LED_Obj *pLedObj;PDC_LedCfg *pLedCfgs;LED_State *pLedState;Uint32 dutyRation = 0;Uint32 dutydiff = 0;pLedObj = (LED_Obj *)pUserArgs;PDC_smartIrCfg *pSmartIrCfg = NULL;Int32 status;/* 非SOCpwm模式不启动线程 */status = PDC_cfgGet(PDC_MODULE_SMARTIR, (Ptr *)&pSmartIrCfg);if ( OSA_isSuccess(status) && (pSmartIrCfg->smartIrType == PDC_SMARTIR_DAC88347 || pSmartIrCfg->smartIrType == PDC_SMARTIR_I2C) ){OSA_INFO("Get smartIr cfg is Dac light ,LED_ledCheckThead dirct return!\n");return OSA_SOK;}while(!OSA_thrShouldStop()){pLedCfgs = pLedObj->pLedCfg;pLedState = pLedObj->pLedState;/* 如果LED有效,并且是闪烁状态 */for (i = 0; i<pLedObj->ledCfgNum; i++){if (pLedObj->closeAll){if ( (pLedCfgs->code > LED_GPIO_TPYE)&& (pLedCfgs->code < LED_PWM_TPYE)) // pwm控制的led{LED_flashLightSetState(pLedCfgs->smartIrIndex, pLedCfgs->frequence, 0);PRC_pwmDisable(pLedObj->hPwm[pLedCfgs->smartIrIndex]);}else{LED_set(pLedCfgs, 0);}}else{if (pLedState->turnType == 1){if (pLedState->currState){if (pLedState->remainTime == 0){pLedState->remainTime = pLedState->turnOffTime;if ( (pLedCfgs->code > LED_GPIO_TPYE)&& (pLedCfgs->code < LED_PWM_TPYE)) // pwm控制的led{LED_flashLightSetState(pLedCfgs->smartIrIndex, pLedCfgs->frequence, 0);PRC_pwmDisable(pLedObj->hPwm[pLedCfgs->smartIrIndex]);}else{LED_set(pLedCfgs, 0);}pLedState->currState = 0;}else{pLedState->remainTime--;}}else{if (pLedState->remainTime == 0){pLedState->remainTime = pLedState->turnOnTime;if ( (pLedCfgs->code > LED_GPIO_TPYE)&& (pLedCfgs->code < LED_PWM_TPYE)) // pwm控制的led{if (pLedState->state >= 100){dutyRation = 10000;}else{dutyRation = pLedState->state * 100;}if(pLedCfgs->highThreshold > pLedCfgs->lowThreshold){dutydiff = pLedCfgs->highThreshold - pLedCfgs->lowThreshold;dutyRation *= dutydiff;dutyRation /= 100;dutyRation += pLedCfgs->lowThreshold * 100;}LED_flashLightSetState(pLedCfgs->smartIrIndex, pLedCfgs->frequence, dutyRation);}else{LED_set(pLedCfgs, pLedState->state);}pLedState->currState = 1;}else{pLedState->remainTime--;}}}}pLedCfgs++;pLedState++;}msleep(100);}return OSA_SOK;
}/*******************************************************************************
* 函数名 : LED_setState
* 描 述 : 设置指定LED灯,目前LED灯低电平有点亮。
* 输 入 : pLedParams: 设置参数。
* 输 出 : 无
* 返回值 : OSA_EFAIL: 失败
* OSA_SOK : 成功
*******************************************************************************/
Int32 LED_setState(PDC_LedSetParams *pLedParams)
{Uint32 i,dutyRation;Int32 status;Uint32 dutydiff = 0;Uint32 ledCtr;LED_Obj *pLedObj;PDC_LedCfg *pLedCfgs;LED_State *pLedState;LED_State *pBackLedState;PDC_LedCfg *pBackLedCfgs;Int32 SmartirStatus;PDC_smartIrCfg *pSmartIrCfg = NULL;//Int32 chipId;PDC_dacParams pData;pLedObj = &gLedObj;/* 获取SmartIR配置 */SmartirStatus = PDC_cfgGet(PDC_MODULE_SMARTIR, (Ptr *)&pSmartIrCfg);OSA_assertNotNull(pLedParams);if (OSA_isNull(pLedParams)){OSA_ERROR("Input params is null!\n");return OSA_EFAIL;}pLedState = pLedObj->pLedState;pLedCfgs = pLedObj->pLedCfg;pBackLedState = pLedObj->pLedState;pBackLedCfgs = pLedObj->pLedCfg;OSA_DEBUG("LED:state:%d code:%d\n",pLedParams->state,pLedParams->code);if (pLedObj->closeAll){return OSA_SOK;}/* code为-1时,认为是要关闭所有的LED灯,在reboot时需要关闭所以LED灯 */ if (pLedParams->code == -1){pLedObj->closeAll = 1;return OSA_SOK;}if (pLedParams->code == LED_All) /* 对所有灯操作 */{for (i = 0; i < pLedObj->ledCfgNum; i++){LED_set(pLedCfgs, (Uint32)pLedParams->state);pLedState->currState = (Uint32)pLedParams->state;pLedState++;pLedCfgs++;}return OSA_SOK;}/* 如果没有成功获取过配置,则ledCfgNum为0,不会进如循环。*/for (i = 0; i < pLedObj->ledCfgNum; i++){if (pLedCfgs->code == pLedParams->code){break;}pLedState++;pLedCfgs++;}/* 没有找到对应的code。*/if (i == pLedObj->ledCfgNum){// TODO: 由于应用目前无法获知LED灯信息,引脚不存在的情况暂时不做错误处理。OSA_DEBUG("The led 0x%x isn't exist !\n",pLedParams->code);return OSA_SOK;}/* 闪烁方式 */if (pLedParams->offCycle || pLedParams->onCycle){pLedState->turnType = 1;pLedState->state = (Uint16)pLedParams->state;pLedState->turnOnTime = pLedParams->onCycle / LED_TURN_CYCLES;pLedState->turnOffTime = pLedParams->offCycle / LED_TURN_CYCLES;}else{if ( (pLedCfgs->code > LED_GPIO_TPYE)&& (pLedCfgs->code < LED_PWM_TPYE)) // pwm控制的led{pLedState->turnType = 0;if( OSA_isSuccess(SmartirStatus) && pSmartIrCfg->smartIrType == PDC_SMARTIR_DAC88347){/* 闪光灯亮度可调的设备,在pdc层直接操作pwm*/if (0 == pLedParams->state){/*要关闭pwm 先将占空比设置为百分0 再关闭*/pData.chn=pLedObj->initParams_dac[pLedCfgs->smartIrIndex].channel;pData.data=0;status = PDC_dacOutput(pLedObj->initParams_dac[pLedCfgs->smartIrIndex].chipId,&pData);if (OSA_isFail(status)){OSA_ERROR("Fail to PDC_dacOutput 0! DAC CH:%d.\n",pLedObj->initParams_dac[pLedCfgs->smartIrIndex].channel);return OSA_EFAIL;}}else{/* 比列缩小百分之99,以防应用需要比列 */if (pLedParams->state >= 99){dutyRation = 99;}else{dutyRation = pLedParams->state ;}/*由于并不是占空比为0时才不亮 这里做一下web进度条调节到底层的映射*//*若在配置文件中配置了占空比调节范围 那么进行占空比映射*/if(pLedCfgs->highThreshold > pLedCfgs->lowThreshold){dutydiff = pLedCfgs->highThreshold - pLedCfgs->lowThreshold;dutyRation *= dutydiff;dutyRation /= 100;dutyRation += pLedCfgs->lowThreshold ;}pData.chn=pLedObj->initParams_dac[pLedCfgs->smartIrIndex].channel;pData.data=dutyRation;status = PDC_dacOutput(pLedObj->initParams_dac[pLedCfgs->smartIrIndex].chipId,&pData);if (OSA_isFail(status)){OSA_ERROR("Fail to PDC_dacOutput duty %u! DAC CH:%d.\n",dutyRation, pLedObj->initParams_dac[pLedCfgs->smartIrIndex].channel);return OSA_EFAIL;}return OSA_SOK;}}else{/* 闪光灯亮度可调的设备,在pdc层直接操作pwm*/if (0 == pLedParams->state){/*要关闭pwm 先将占空比设置为百分0 再关闭*/status = LED_flashLightSetState(pLedCfgs->smartIrIndex, pLedCfgs->frequence, 0);if (OSA_isFail(status)){OSA_ERROR("Fail to LED_flashLightSetState duty 0! PWM%d.\n",pLedObj->initParams[pLedCfgs->smartIrIndex].pwmId);return OSA_EFAIL;}status = PRC_pwmDisable(pLedObj->hPwm[pLedCfgs->smartIrIndex]);if (OSA_isFail(status)){OSA_ERROR("Fail to disable PWM%d.\n",pLedObj->initParams[pLedCfgs->smartIrIndex].pwmId);return OSA_EFAIL;}}else{/* 5000 4路全开到95以上会死机 */if (pLedParams->state >= 90){dutyRation = 9000;}else{dutyRation = pLedParams->state * 100;}/*由于并不是占空比为0时才不亮 这里做一下web进度条调节到底层的映射*//*若在配置文件中配置了占空比调节范围 那么进行占空比映射*/if(pLedCfgs->highThreshold > pLedCfgs->lowThreshold){dutydiff = pLedCfgs->highThreshold - pLedCfgs->lowThreshold;dutyRation *= dutydiff;dutyRation /= 100;dutyRation += pLedCfgs->lowThreshold * 100;}else if(pLedCfgs->highThreshold < pLedCfgs->lowThreshold){dutyRation = 9000 - dutyRation;dutydiff = pLedCfgs->lowThreshold - pLedCfgs->highThreshold;dutyRation *= dutydiff;dutyRation /= 100;dutyRation += pLedCfgs->highThreshold * 100;}status = LED_flashLightSetState(pLedCfgs->smartIrIndex, pLedCfgs->frequence, dutyRation);if (OSA_isFail(status)){OSA_ERROR("Fail to LED_flashLightSetState duty %u! PWM%d.\n",dutyRation, pLedObj->initParams[pLedCfgs->smartIrIndex].pwmId);return OSA_EFAIL;}return OSA_SOK;}}}else if ( (pLedCfgs->code > LED_PWM_TPYE)&& (pLedCfgs->code < LED_I2C_TPYE)) // i2c控制的led{PDC_LedSetParams pLedParam;OSA_memCpySize(&pLedParam, pLedParams, sizeof(PDC_LedSetParams));OSA_INFO("code = %d\n", pLedParams->code);OSA_INFO("state = %d\n", pLedParams->state);OSA_INFO("illuminance = %d\n", pLedParams->illuminance);if (pLedParams->illuminance >= 100){dutyRation = 100;}else{dutyRation = pLedParams->illuminance;}/*由于并不是占空比为0时才不亮 这里做一下web进度条调节到底层的映射*//*若在配置文件中配置了占空比调节范围 那么进行占空比映射*/if((0 !=pLedParams->illuminance) && (pLedCfgs->highThreshold > pLedCfgs->lowThreshold)){dutydiff = pLedCfgs->highThreshold - pLedCfgs->lowThreshold;dutyRation *= dutydiff;dutyRation /= 100;dutyRation += pLedCfgs->lowThreshold ;}pLedParam.illuminance = dutyRation;if(pLedObj->hI2c[pLedCfgs->smartIrIndex] && pLedObj->cbParams[pLedCfgs->smartIrIndex].LED_i2cSetState){pLedObj->cbParams[pLedCfgs->smartIrIndex].LED_i2cSetState(pLedObj->hI2c[pLedCfgs->smartIrIndex], &pLedParam);}} else{pLedState->turnType = 0;for (i = 0; i < pLedObj->ledCfgNum; i++){if ((NULL == pBackLedState) || (NULL == pBackLedCfgs)){OSA_ERROR("pBackLedState or pBackLedCfgs is null!\n");return OSA_EFAIL;}if ((pBackLedCfgs->ledNum == pLedCfgs->ledNum) &&(pBackLedCfgs->code != pLedCfgs->code)){if ((NULL != pBackLedState) && (pBackLedState->turnType == 1)){pLedState->currState = (Uint16)pLedParams->state;return OSA_SOK;}if ((pLedParams->state == 0) &&(NULL != pBackLedState) &&(pBackLedState->currState == 1)){if (pBackLedCfgs->level){LED_set(pBackLedCfgs, pBackLedState->currState);}else{if (0 == pBackLedState->currState){ledCtr = 1;}else{ledCtr = 0;}LED_set(pBackLedCfgs, ledCtr);}pLedState->currState = (Uint16)pLedParams->state;return OSA_SOK;}}pBackLedState++;pBackLedCfgs++;}
#if 0if (pLedCfgs->level){LED_set(pLedCfgs, (Uint32)pLedParams->state);}else{if (0 == pLedParams->state){ledCtr = 1;}else{ledCtr = 0;}LED_set(pLedCfgs, ledCtr);}
#elseLED_set(pLedCfgs, (Uint32)pLedParams->state);
#endifpLedState->currState = (Uint16)pLedParams->state;}}return OSA_SOK;
}/*******************************************************************************
* 函数名 : LED_getPins
* 描 述 : 获取LED模块所属的GPIO引脚
* 输 入 : pLedObj: LED灯控制结构体
* pLedCfgs: LED灯配置信息
* 输 出 : 无。
* 返回值 : OSA_EFAIL: 失败
* OSA_SOK : 成功
*******************************************************************************/
static Int32 LED_getPins(LED_Obj *pLedObj, PDC_LedCfg *pLedCfgs)
{Int32 status;Int32 SmartirStatus;PDC_LedCfg *pLedCfgsNew;PRC_GpioParams param;Uint32 init = 1;PDC_smartIrCfg *pSmartIrCfg = NULL;/* 获取SmartIR配置 */SmartirStatus = PDC_cfgGet(PDC_MODULE_SMARTIR, (Ptr *)&pSmartIrCfg);/* 申请内存保存配置 */if(pLedObj->ledCfgNum == 0){OSA_ERROR("dev has no led !\n");return OSA_EFAIL;}pLedCfgsNew = OSA_memCalloc(pLedObj->ledCfgNum * sizeof(PDC_LedCfg));if (OSA_isNull(pLedCfgsNew)){OSA_ERROR("Mem alloc failed !\n");return OSA_EFAIL;}pLedObj->pLedCfg = pLedCfgsNew;OSA_clear(¶m);param.dir = PRC_GPIO_DIR_OUT;/* 获取和设置所有的GPIO */while (pLedCfgs->code != LED_INVLIDATE){if( LED_FlashLight == pLedCfgs->code|| (pLedCfgs->code >= LED_White_PWM&& pLedCfgs->code < LED_PWM_TPYE)|| ( (LED_FillInLight == pLedCfgs->code) &&(pLedCfgs->gpioCfg1 == PDC_CFG_GPIO_INVA) &&(pLedCfgs->gpioCfg2 == PDC_CFG_GPIO_INVA))|| ( (LED_InfraredLight == pLedCfgs->code) &&(pLedCfgs->gpioCfg1 == PDC_CFG_GPIO_INVA) &&(pLedCfgs->gpioCfg2 == PDC_CFG_GPIO_INVA))|| (pLedCfgs->code > LED_PWM_TPYE&& pLedCfgs->code < LED_I2C_TPYE)){if (init){if( OSA_isSuccess(SmartirStatus) && (pSmartIrCfg->smartIrType == PDC_SMARTIR_DAC88347) ){status = LED_DacLightCreate();}else if( OSA_isSuccess(SmartirStatus) && (pSmartIrCfg->smartIrType == PDC_SMARTIR_I2C) ){OSA_INFO("LED_I2cLightCreate\n");status = LED_I2cLightCreate();}/* 有闪光灯的设备,在pdc层直接操作pwm*/else{status = LED_flashLightCreate();}if (OSA_isFail(status)){return OSA_EFAIL;}init = 0;}pLedCfgsNew->gpioCfg1 = pLedCfgs->gpioCfg1;pLedCfgsNew->gpioCfg2 = pLedCfgs->gpioCfg2;goto next;}/* 转换成GPIO号 */pLedCfgsNew->gpioCfg1= PDC_cfgGetGpioId(pLedCfgs->gpioCfg1);/* 设置LED灯GPIO引脚 */param.mode = PDC_cfgGetGpioMode(pLedCfgs->gpioCfg1);if (pLedCfgs->gpioCfg2 != PDC_CFG_GPIO_INVA){/* 转换成GPIO号 */pLedCfgsNew->gpioCfg2= PDC_cfgGetGpioId(pLedCfgs->gpioCfg2);param.mode = PDC_cfgGetGpioMode(pLedCfgs->gpioCfg2);}else{pLedCfgsNew->gpioCfg2 = PDC_CFG_GPIO_INVA;}if(pLedCfgs->needApply){status = PRC_gpioGetPin(pLedCfgsNew->gpioCfg1, ¶m);if (OSA_isFail(status)){OSA_ERROR("Get gpio failed %u !\n",pLedCfgsNew->gpioCfg1);goto free_pins;}#if (defined(PLAT_AMBACV2) || defined(PLAT_AMBACV22) || defined(PLAT_AMBACV25) || defined(PLAT_AMBACV28))PRC_gpioSetLevel(pLedCfgsNew->gpioCfg1, 0);
#endifif (pLedCfgs->gpioCfg2 != PDC_CFG_GPIO_INVA){status = PRC_gpioGetPin(pLedCfgsNew->gpioCfg2, ¶m);if (OSA_isFail(status)){PRC_gpioPutPin(pLedCfgsNew->gpioCfg1);OSA_ERROR("Get gpio %u faild !\n",pLedCfgsNew->gpioCfg2);goto free_pins;}}else /* 对于单引脚LED灯 上电后点亮 */{if (pLedCfgs->level){PRC_gpioSetLevel(pLedCfgsNew->gpioCfg1, 0);}else{PRC_gpioSetLevel(pLedCfgsNew->gpioCfg1, 1);}if(pLedCfgs->powerOnState) /* 上电后灭掉 */{if (pLedCfgs->level){PRC_gpioSetLevel(pLedCfgsNew->gpioCfg1, 1);}else{PRC_gpioSetLevel(pLedCfgsNew->gpioCfg1, 0);}}}}
next:pLedCfgsNew->code = pLedCfgs->code;pLedCfgsNew->level= pLedCfgs->level;pLedCfgsNew->needApply= pLedCfgs->needApply;pLedCfgsNew->ledNum = pLedCfgs->ledNum;pLedCfgsNew->ledSetWay = pLedCfgs->ledSetWay;pLedCfgsNew->lowThreshold = pLedCfgs->lowThreshold;pLedCfgsNew->highThreshold = pLedCfgs->highThreshold;pLedCfgsNew->smartIrIndex = pLedCfgs->smartIrIndex;pLedCfgsNew->frequence = pLedCfgs->frequence;pLedCfgs++;pLedCfgsNew++;}return OSA_SOK;free_pins:while(pLedCfgsNew != pLedObj->pLedCfg){PRC_gpioPutPin(pLedCfgsNew->gpioCfg1);if (pLedCfgs->gpioCfg2 != PDC_CFG_GPIO_INVA){PRC_gpioPutPin(pLedCfgsNew->gpioCfg2);}}OSA_memFree(pLedObj->pLedCfg);return OSA_EFAIL;
}/*******************************************************************************
* 函数名 : LED_putPins
* 描 述 : 释放LED模块所属的GPIO引脚
* 输 入 : pLedObj: LED灯控制结构体
* 输 出 : 无。
* 返回值 : OSA_EFAIL: 失败
* OSA_SOK : 成功
*******************************************************************************/
static Int32 LED_putPins(LED_Obj *pLedObj)
{Uint32 i;Int32 status = OSA_SOK;Int32 SmartirStatus=OSA_SOK;PDC_LedCfg *pLedCfg;pLedCfg = pLedObj->pLedCfg;PDC_smartIrCfg *pSmartIrCfg = NULL;/* 获取SmartIR配置 */SmartirStatus = PDC_cfgGet(PDC_MODULE_SMARTIR, (Ptr *)&pSmartIrCfg);for (i = 0; i < pLedObj->ledCfgNum; i++){if( LED_FlashLight == pLedCfg->code ||( (LED_FillInLight == pLedCfg->code) &&(pLedCfg->gpioCfg1 == PDC_CFG_GPIO_INVA) &&(pLedCfg->gpioCfg2 == PDC_CFG_GPIO_INVA))||( (LED_InfraredLight == pLedCfg->code) &&(pLedCfg->gpioCfg1 == PDC_CFG_GPIO_INVA) &&(pLedCfg->gpioCfg2 == PDC_CFG_GPIO_INVA))){if( OSA_isSuccess(SmartirStatus) && (pSmartIrCfg->smartIrType == PDC_SMARTIR_DAC88347) ){LED_DacLightRelease();}else if( OSA_isSuccess(SmartirStatus) && (pSmartIrCfg->smartIrType == PDC_SMARTIR_I2C) ){status = LED_I2cLightRelease();}else{LED_flashLightRelease();}continue;}status |= PRC_gpioPutPin(pLedCfg->gpioCfg1);if (pLedCfg->gpioCfg2 != PDC_CFG_GPIO_INVA){status |= PRC_gpioPutPin(pLedCfg->gpioCfg2);}pLedCfg++;}status |= OSA_memFree(pLedObj->pLedCfg);return status;
}/*******************************************************************************
* 函数名 : PDC_ledInit
* 描 述 : LED模块加载函数
* 输 入 : 无。
* 输 出 : 无。
* 返回值 : OSA_EFAIL: 失败
* OSA_SOK : 成功
*******************************************************************************/
Int32 __init PDC_ledInit(void)
{Int32 status;Uint32 count = 0;LED_Obj *pLedObj = &gLedObj;LED_State *pLedState;PDC_LedCfg *pLedCfgs, *pLedCfgsNew;OSA_ThrCreate ledThread;OSA_ThrHandle *phThr;MISC_CbParams *pMiscCbParams = NULL;OSA_INFO("PDC_ledInit\n");PDC_miscGetCbParams(&pMiscCbParams);if (OSA_isNotNull(pMiscCbParams)){pMiscCbParams->OpSetLed = LED_setState;}/* 获取LED配置引脚 */status = PDC_cfgGet(PDC_MODULE_LED,(Ptr *)&pLedCfgs);if (OSA_isFail(status)){OSA_ERROR("Get led cfg failed !\n");return OSA_EFAIL;}pLedCfgsNew = pLedCfgs;/* 创建互斥锁,消除lint用 */status = OSA_mutexCreate(OSA_MUTEX_NORMAL, &pLedObj->hLedMutex);if (OSA_isFail(status)){OSA_ERROR("OSA_mutexCreate failed !\n");return OSA_EFAIL;}/* 统计LED灯个数 */while (pLedCfgsNew->code != LED_INVLIDATE){count++;pLedCfgsNew++;}pLedObj->ledCfgNum = count;status = LED_getPins(pLedObj, pLedCfgs);if (OSA_isFail(status)){OSA_ERROR("Get led pins failed !\n");goto delete_mutex;}/* 申请内存保存配置 */pLedState = OSA_memCalloc(count * sizeof(LED_State));if (OSA_isNull(pLedState)){OSA_ERROR("Mem alloc failed !\n");goto free_pins;}pLedState->turnType = 0;pLedObj->pLedState = pLedState;/* 启动LED灯亮灯定时器,周期性的设置LED亮状态 */phThr = &pLedObj->hLedCheckThr;OSA_clearSize(&ledThread, sizeof(OSA_ThrCreate));ledThread.OpThrRun = LED_ledCheckThead;ledThread.stackSize = OSA_THR_STACK_SIZE_DEFAULT;ledThread.thrPol = OSA_SCHED_FIFO;ledThread.thrPri = (Uint16)OSA_THR_PRI_MIN(OSA_SCHED_FIFO);ledThread.pUsrArgs = pLedObj;ledThread.pName = "led_Thr";status = OSA_thrCreateEx(&ledThread, phThr);if (OSA_isFail(status)){OSA_ERROR("Fail to create led check thread!\n");goto free_state_mem;}return status;free_state_mem:OSA_memFree(pLedObj->pLedState);free_pins:LED_putPins(pLedObj);delete_mutex:OSA_mutexDelete(pLedObj->hLedMutex);return OSA_EFAIL;
}/*******************************************************************************
* 函数名 : PDC_ledExit
* 描 述 : LED模块卸载函数
* 输 入 : 无。
* 输 出 : 无。
* 返回值 : OSA_EFAIL: 失败
* OSA_SOK : 成功
*******************************************************************************/
Int32 __exit PDC_ledExit(void)
{Int32 status = OSA_SOK;LED_Obj *pLedObj = &gLedObj;status |= OSA_thrDelete(pLedObj->hLedCheckThr);status |= OSA_memFree(pLedObj->pLedState);status |= LED_putPins(pLedObj);/* 销毁互斥锁,消除lint用 */OSA_mutexDelete(pLedObj->hLedMutex);return status;
}/*******************************************************************************
* pdc_peripheralsCfg_ambacv22.c
*
* Copyright (C) 2011-2013 ZheJiang Dahua Technology CO.,LTD.
*
* Author : wang_zhenyu <wang_zhenyudahuatech.com>
* Version: V1.0.0 2020-10-16 Create
*
* Description: ambacv22配置初始化入口。按照ambacv22管脚资源进行配置,使用3516ev300
* 芯片的设备需要裁减和修改。
*
* 1. 硬件说明。
*
* 2. 程序结构说明。
*
* 3. 使用说明。
*
* 4. 局限性说明。
*
* 5. 其他说明。
*
*
* Modification:
* Date :
* Revision:
* Author :
* Contents:
*******************************************************************************/#include <sys_info.h>
#include "pdc_cfg.h"
#include "pdc_priv.h"//#define FPGA_UPGRADE_SPI_SIMULATE/* 恢复默认配置 */
static PDC_ResetStateCfg gRstStateCfg =
{.gpioCfg = PDC_cfgSetGpio(45, 0),.resetLevel = 0,
};/* 系统重启:reboot */
static PDC_RebootCfg gRstSysCfg =
{
#if 0.rebootType = PDC_REBOOT_TYPE_GPIO,.gpioCfg = 43,
#else.rebootType = PDC_REBOOT_TYPE_WDT,.gpioCfg = PDC_CFG_GPIO_INVA,
#endif.level = 0,
};/* 看门狗配置 */
static PDC_WdtCfg gWdtCfg =
{.wdtTypeFlags = PDC_WDT_SOFTWARE,.hardWareWdtCfg ={.gpioCfg = PDC_CFG_GPIO_INVA,.hWdtFeedType = 2,}
};static PDC_ComMapInfo gComPortCfg =
{.comMapItems[0] = {.uartRxGpio = PDC_CFG_GPIO_INVA,.uartRxVal = -1,.uartTxGpio = PDC_CFG_GPIO_INVA,.uartTxVal = -1,.rs485Gpio = PDC_CFG_GPIO_INVA,.type = COM_IS_CONSOLE,.port = COM_PORT_1,.comStyle = COM_STYLE_UART,.changeGio = PDC_CFG_GPIO_INVA,.reserved ={0,0,0,},},.comMapItems[1] = {.uartRxGpio = PDC_cfgSetGpio(142, 0),.uartRxVal = -1,.uartTxGpio = PDC_cfgSetGpio(143, 0),.uartTxVal = -1,.rs485Gpio = PDC_CFG_GPIO_INVA,.type = COM_STYLE_UART,.port = COM_PORT_2,.comStyle = COM_STYLE_UART,.changeGio = PDC_CFG_GPIO_INVA,.reserved ={0,0,0,},},.comMapItems[2] = {.uartRxGpio = PDC_CFG_GPIO_INVA,.uartRxVal = -1,.uartTxGpio = PDC_CFG_GPIO_INVA,.uartTxVal = -1,.rs485Gpio = PDC_CFG_GPIO_INVA,.type = COM_IS_GENERAL,.port = COM_PORT_MAX_NUM,/* 标识无该串口,配置结束 */.comStyle = COM_STYLE_MAX,.changeGio = PDC_CFG_GPIO_INVA,.reserved ={0,0,0,},},.pullType = PRC_PINMUX_NOPULL,
};/* RTC配置 */
static PDC_RtcCfg gRtcCfg =
{.rtcId = PDC_RTC_TYPE_SOCRTC,.rtcDevCfg = {0,0},.historicalRtcId = PDC_RTC_TYPE_NR,.rtcHistDevCfg = {0, 0},.reserved = 0,
};static PDC_PlatformCfg gPlatformCfgAll =
{.spiBusInitParams ={{ /* FPGA通信使用 */2, 0, 1, SPI_TRANSMIT_POLLED,{-1,0,PRC_PINMUX_NOPULL,0,0},{-1,0,PRC_PINMUX_NOPULL,0,0},{-1,0,PRC_PINMUX_NOPULL,0,0},},{ /* FPGA加载使用,0-4是控制器 4实际是另外一组复用GPIO的spi1 *///ssi1_sclk(GPIO35) ssi1_txd(GPIO36) ssi1_rxd(GPIO37)/* FPGA升级使用 */4, 0, 1, SPI_TRANSMIT_POLLED,{-1,0,PRC_PINMUX_NOPULL,0,0},{-1,0,PRC_PINMUX_NOPULL,0,0},{-1,0,PRC_PINMUX_NOPULL,0,0},},{SPI_BUS_INVALID ,0,0,0,{0,0,0,0,0},{0,0,0,0,0},{-1,0,0,0,0},},},.I2CinitParams ={{I2C_BUS_INVALID ,0,0,0,{-1,0,0,0,0},{-1,0,0,0,0},I2C_GIO_RESET_INVALID,},},
};static PDC_PlatformCfg gPlatformCfgAll_MULTI =
{.spiBusInitParams ={{ /* 双目FPGA通信和加载复用使用 *//* FPGA 0-4是控制器 4实际是另外一组复用GPIO的spi1 *///ssi1_sclk(GPIO35) ssi1_txd(GPIO36) ssi1_rxd(GPIO37)4, 0, 1, SPI_TRANSMIT_POLLED,{-1,0,PRC_PINMUX_NOPULL,0,0},{-1,0,PRC_PINMUX_NOPULL,0,0},{-1,0,PRC_PINMUX_NOPULL,0,0},},{SPI_BUS_INVALID ,0,0,0,{0,0,0,0,0},{0,0,0,0,0},{-1,0,0,0,0},},},.I2CinitParams ={{I2C_BUS_INVALID ,0,0,0,{-1,0,0,0,0},{-1,0,0,0,0},I2C_GIO_RESET_INVALID,},},
};static PDC_KeyCfg gKeyCfg[] =
{{.keyType = PDC_KEY_TYPE_GPIO,.timeOutMs = 500,.cfg.gpioKeyCfg ={.codeMask = PDC_KEY_RESET,.keyGpio = PDC_cfgSetGpio(45, 0),.keyDownLevel = 0,},},{/* 结束标志 */.keyType = PDC_KEY_TYPE_NR,.timeOutMs = 0,.cfg.gpioKeyCfg ={.codeMask = KEY_INVALID,.keyGpio = PDC_CFG_GPIO_INVA,.keyDownLevel = 0,}},
};static PDC_BeepCfg gBeepCfg =
{.gpioCfg = PDC_cfgSetGpio(41, 1), /* PWM0/GPIO41 */.outLevel = 1,.ctrlMode = PDC_BEEP_CTRL_BY_PWM,.beepPwmCfg = {.pwmId = 0,.mode = 0,.activeLevel = 1,.frequence = 3100,},
};/* LED使用的是配置数组,需要配套PDC_smartIrCfg */
static PDC_LedCfg gLedCfgs[] =
{{.code = LED_OK_STATUS,.ledNum = 0,.gpioCfg1 = PDC_cfgSetGpio(14, 0),.gpioCfg2 = PDC_CFG_GPIO_INVA,.level = 0,.needApply = 1,.powerOnState = 1,},{.code = LED_PHY_LINK,.ledNum = 1,.gpioCfg1 = PDC_cfgSetGpio(13, 0),.gpioCfg2 = PDC_CFG_GPIO_INVA,.level = 0,.needApply = 1,.powerOnState = 1,},{.code = LED_INVLIDATE, /* 表明结束 */.ledNum = 2,},
};static PDC_LedCfg gLedCfgs_Multi[] =
{{.code = LED_Sys,.ledNum = 0,.gpioCfg1 = PDC_cfgSetGpio(14, 0),.gpioCfg2 = PDC_CFG_GPIO_INVA,.level = 0,.needApply = 1,.powerOnState = 1,},{.code = LED_PHY_LINK,.ledNum = 1,.gpioCfg1 = PDC_cfgSetGpio(13, 0),.gpioCfg2 = PDC_CFG_GPIO_INVA,.level = 0,.needApply = 1,.powerOnState = 1,},{.code = LED_LaserEn,.ledNum = 2,.gpioCfg1 = PDC_cfgSetGpio(7, 0),.gpioCfg2 = PDC_CFG_GPIO_INVA,.level = 0,.needApply = 1,.powerOnState = 1,},{.code = LED_INVLIDATE, /* 表明结束 */.ledNum = 3,},
};static PDC_GpioStateCfg gGpioCfg_8k[] =
{{.useType = GPIO_TRIGGER,.gpioCfg = PDC_cfgSetGpio(78, 0),},{.useType = GPIO_FPGA_RESET,.gpioCfg = PDC_cfgSetGpio(83, 0),},{.useType = GPIO_PHASE_MODE_START_STATUS,.gpioCfg = PDC_cfgSetGpio(77, 0),},{.useType = GPIO_PHASE_MODE_END_STATUS,.gpioCfg = PDC_cfgSetGpio(84, 0),},{.useType = GPIO_SEN_RESET,.gpioCfg = PDC_cfgSetGpio(85, 0),},{.useType = GPIO_SEN_SPI_SEL_0,.gpioCfg = PDC_cfgSetGpio(79, 0),},{.useType = GPIO_SEN_SPI_SEL_1,.gpioCfg = PDC_cfgSetGpio(80, 0),},{.useType = GPIO_SEN_SPI_SEL_2,.gpioCfg = PDC_cfgSetGpio(81, 0),},{.useType = GPIO_SEN_SPI_SEL_3,.gpioCfg = PDC_cfgSetGpio(82, 0),},{.useType = GPIO_SEN_SPI_SEL_4,.gpioCfg = PDC_cfgSetGpio(86, 0),},{.useType = GPIO_STATE_NR,.gpioCfg = PDC_CFG_GPIO_INVA, // 表示结束,不能删},
};static PDC_GpioStateCfg gGpioCfg_7000[] =
{{.useType = GPIO_TRIGGER,.gpioCfg = PDC_cfgSetGpio(6, 0),},{.useType = GPIO_FPGA_RESET,.gpioCfg = PDC_cfgSetGpio(7, 0),},{.useType = GPIO_PHASE_MODE_START_STATUS,.gpioCfg = PDC_cfgSetGpio(4, 0),},{.useType = GPIO_PHASE_MODE_END_STATUS,.gpioCfg = PDC_cfgSetGpio(5, 0),},{.useType = GPIO_STATE_NR,.gpioCfg = PDC_CFG_GPIO_INVA, // 表示结束,不能删},
};static PDC_GpioStateCfg gGpioCfg_Multi[] =
{{.useType = GPIO_TRIGGER,.gpioCfg = PDC_cfgSetGpio(0, 0),},{.useType = GPIO_TRIGGER_INT,.gpioCfg = PDC_cfgSetGpio(4, 0),},{.useType = GPIO_FPGA_JTAG_DISABLE,.gpioCfg = PDC_cfgSetGpio(5, 0),},{.useType = GPIO_STATE_NR,.gpioCfg = PDC_CFG_GPIO_INVA, // 表示结束,不能删},
};// xilinx 需在线加载
static PDC_fpgaCfg __initdata gFpgaCfgInit_Xilinx =
{.updateCfg ={.updateMode = FPGA_SSMODE,.ssModeCfg ={.oe = PDC_CFG_GPIO_INVA, //电平转换芯片开关.init_b = PDC_cfgSetGpio(105, 0), //fpga 复位状态,从fpga端读.program_b = PDC_cfgSetGpio(106, 0), //fpga复位信号.done = PDC_cfgSetGpio(107, 0), //加载完成信号 从fpga端读.independentBus = 1,.bus = FPGA_SPI,.spiCfg ={.busId = 4,.cs = 0,.freq = 12000000,.bitLen = 8,.mode = SPI_MODE_0 | (SPI_RXTX_ALL<<SPI_RXTX_SHIFT),.intGpio = PDC_CFG_GPIO_INVA,.csPinCfg ={/* 真正的片选 假的GPIO*/.pinId = PDC_cfgSetGpio(38, 0),.mode = 0,.pullType = PRC_PINMUX_NOPULL,.isReverse = 0,.debouncTime = 0,},},.fpgaType = FPGA_XILINX,},},.commCfg ={.commMode = FPGA_SPI,.spiCfg ={.busId = 2,.cs = 0,.freq = 1000000,.bitLen = 8,.mode = SPI_MODE_0 | (SPI_RXTX_ALL<<SPI_RXTX_SHIFT),.intGpio = PDC_CFG_GPIO_INVA,.csPinCfg ={/* 真正的片选 */.pinId = PDC_cfgSetGpio(30, 0), //GPIO 3_7.mode = 0,.pullType = PRC_PINMUX_NOPULL,.isReverse = 0,.debouncTime = 0,},},},
};// 紫光 需在线加载,不同于xilinx,升级数据需按特殊格式传输
static PDC_fpgaCfg __initdata gFpgaCfgInit_PGL =
{.updateCfg ={.updateMode = FPGA_SSMODE,.ssModeCfg ={.oe = PDC_CFG_GPIO_INVA, //电平转换芯片开关.init_b = PDC_cfgSetGpio(158, 0), //fpga 复位状态,从fpga端读.program_b = PDC_cfgSetGpio(160, 0), //fpga复位信号.done = PDC_cfgSetGpio(159, 0), //加载完成信号 从fpga端读.independentBus = 1,.bus = FPGA_SPI,.spiCfg ={.busId = 4,.cs = 0,.freq = 12000000,.bitLen = 8,.mode = SPI_MODE_0 | (SPI_RXTX_ALL<<SPI_RXTX_SHIFT),.intGpio = PDC_CFG_GPIO_INVA,.csPinCfg ={/* 真正的片选 假的GPIO*/.pinId = PDC_cfgSetGpio(38, 0), //GPIO 4_7.mode = 0,.pullType = PRC_PINMUX_NOPULL,.isReverse = 0,.debouncTime = 0,},},.fpgaType = FPGA_PGL,},},.commCfg ={.commMode = FPGA_SPI,.spiCfg ={.busId = 2,.cs = 0,.freq = 1000000,.bitLen = 8,.mode = SPI_MODE_0 | (SPI_RXTX_ALL<<SPI_RXTX_SHIFT),.intGpio = PDC_CFG_GPIO_INVA,.csPinCfg ={/* 真正的片选 */.pinId = PDC_cfgSetGpio(30, 0),.mode = 0,.pullType = PRC_PINMUX_NOPULL,.isReverse = 0,.debouncTime = 0,},},},
};static PDC_fpgaCfg __initdata gFpgaCfgInit_HME =
{.updateCfg ={.updateMode = FPGA_PSMODE,.psModeCfg ={.nstatus = PDC_CFG_GPIO_INVA, // 状态.confdon = 159, // 配置完成.dclk = 35, // 时钟.data = PDC_CFG_GPIO_INVA, // 数据.ss = 38, // HME-HR’s SS pin,控制fpga进入ps模式后兼做片选.nconfig = 160, // 配置.resetGpio = PDC_CFG_GPIO_INVA, // 复位.ctrlGpio = PDC_CFG_GPIO_INVA, // 控制.spiMode = 2, // 0 代表用原生SPI通信,1代表用模拟GPIO通信,2代表原生与模拟切换.independentBus = 0, // 是否独立总线,0、共用data总线,1、独立总线// 若是复用总线,则不进行ss/dclk/data管脚初始化},},.commCfg ={.commMode = FPGA_SPI,.spiCfg ={.busId = 4, /* 硬件上为GPIO38复用的SPI1,PRC中定义为SPI4 */.cs = 0,.freq = 1000000,.bitLen = 8,.mode = SPI_MODE_0 | (SPI_RXTX_ALL<<SPI_RXTX_SHIFT),.intGpio = PDC_CFG_GPIO_INVA,.csPinCfg ={/* 真正的片选 */.pinId = PDC_cfgSetGpio(38, 0), //GPIO38.mode = 0,.pullType = PRC_PINMUX_NOPULL,.isReverse = 0,.debouncTime = 0,},},},
};static PDC_CfgAllInfo gCfgAllInfo =
{.paCfgArray[PDC_MODULE_RESET_SYS] = &gRstSysCfg,.aCfgSize[PDC_MODULE_RESET_SYS] = sizeof(gRstSysCfg),.paCfgArray[PDC_MODULE_WDT] = &gWdtCfg,.aCfgSize[PDC_MODULE_WDT] = sizeof(gWdtCfg),.paCfgArray[PDC_MODULE_COMPORT] = &gComPortCfg,.aCfgSize[PDC_MODULE_COMPORT] = sizeof(gComPortCfg),};Int32 __init PDC_cfgInit_MV_RH7XXX(SYS_ProductInfo *pPdtInfo)
{Int32 status = OSA_SOK;(void)pPdtInfo;PDC_setHWIDInfo(DSP_CHIP,DSP_CV2S88);gCfgAllInfo.paCfgArray[PDC_MODULE_COMMON] = &gPlatformCfgAll;gCfgAllInfo.aCfgSize[PDC_MODULE_COMMON] = sizeof(gPlatformCfgAll);if( OSA_isSuccess(PDC_checkProductType("MV-SL7082MG17C")) ||OSA_isSuccess(PDC_checkProductType("MV-SL7082CG17C"))){gCfgAllInfo.paCfgArray[PDC_MODULE_RESET_STATE] = &gRstStateCfg,gCfgAllInfo.aCfgSize[PDC_MODULE_RESET_STATE] = sizeof(gRstStateCfg),gCfgAllInfo.paCfgArray[PDC_MODULE_LED] = gLedCfgs,gCfgAllInfo.aCfgSize[PDC_MODULE_LED] = sizeof(gLedCfgs),gCfgAllInfo.paCfgArray[PDC_MODULE_KEY] = gKeyCfg;gCfgAllInfo.aCfgSize[PDC_MODULE_KEY] = sizeof(gKeyCfg);gCfgAllInfo.paCfgArray[PDC_MODULE_GPIO_STATE] = gGpioCfg_8k;gCfgAllInfo.aCfgSize[PDC_MODULE_GPIO_STATE] = sizeof(gGpioCfg_8k);gCfgAllInfo.paCfgArray[PDC_MODULE_FPGA] = &gFpgaCfgInit_Xilinx;gCfgAllInfo.aCfgSize[PDC_MODULE_FPGA] = sizeof(gFpgaCfgInit_Xilinx);OSA_INFO("FPGA type : Xilinx\n");gCfgAllInfo.paCfgArray[PDC_MODULE_BEEP] = &gBeepCfg;gCfgAllInfo.aCfgSize[PDC_MODULE_BEEP] = sizeof(gBeepCfg);}else if( OSA_isSuccess(PDC_checkProductType("MV-DS5131MG30C")) ||OSA_isSuccess(PDC_checkProductType("MV-DS5131MG30X")) ||OSA_isSuccess(PDC_checkProductType("MV-DS5131CG30C"))){gCfgAllInfo.paCfgArray[PDC_MODULE_LED] = gLedCfgs_Multi,gCfgAllInfo.aCfgSize[PDC_MODULE_LED] = sizeof(gLedCfgs_Multi),gCfgAllInfo.paCfgArray[PDC_MODULE_COMMON] = &gPlatformCfgAll_MULTI;gCfgAllInfo.aCfgSize[PDC_MODULE_COMMON] = sizeof(gPlatformCfgAll_MULTI);gCfgAllInfo.paCfgArray[PDC_MODULE_GPIO_STATE] = gGpioCfg_Multi;gCfgAllInfo.aCfgSize[PDC_MODULE_GPIO_STATE] = sizeof(gGpioCfg_Multi);gCfgAllInfo.paCfgArray[PDC_MODULE_FPGA] = &gFpgaCfgInit_HME;gCfgAllInfo.aCfgSize[PDC_MODULE_FPGA] = sizeof(gFpgaCfgInit_HME);OSA_INFO("FPGA type : HME-H1D03\n");}else{gCfgAllInfo.paCfgArray[PDC_MODULE_LED] = gLedCfgs,gCfgAllInfo.aCfgSize[PDC_MODULE_LED] = sizeof(gLedCfgs),gCfgAllInfo.paCfgArray[PDC_MODULE_RESET_STATE] = &gRstStateCfg,gCfgAllInfo.aCfgSize[PDC_MODULE_RESET_STATE] = sizeof(gRstStateCfg),gCfgAllInfo.paCfgArray[PDC_MODULE_KEY] = gKeyCfg;gCfgAllInfo.aCfgSize[PDC_MODULE_KEY] = sizeof(gKeyCfg);gCfgAllInfo.paCfgArray[PDC_MODULE_GPIO_STATE] = gGpioCfg_7000;gCfgAllInfo.aCfgSize[PDC_MODULE_GPIO_STATE] = sizeof(gGpioCfg_7000);gCfgAllInfo.paCfgArray[PDC_MODULE_FPGA] = &gFpgaCfgInit_PGL;gCfgAllInfo.aCfgSize[PDC_MODULE_FPGA] = sizeof(gFpgaCfgInit_PGL);OSA_INFO("FPGA type : PGL22\n");gCfgAllInfo.paCfgArray[PDC_MODULE_BEEP] = &gBeepCfg;gCfgAllInfo.aCfgSize[PDC_MODULE_BEEP] = sizeof(gBeepCfg);}status = PDC_cfgRegister(&gCfgAllInfo);return status;
}相关文章:

在公司的一些笔记
6.19 记住挂载在windows上的账户是DAHUATECH\401593,不是401593Windows与linux不能同时挂载在虚拟盘上 6.21 /******************************************************************************* pdc_ledSy7806e.c* * Description: 提供I2C访问sy7806e。 * * …...

2020C++等级考试二级真题题解
202012数组指定部分逆序重放c #include <iostream> using namespace std; int main() {int a[110];int n, k;cin >> n >> k;for (int i 0; i < n; i) {cin >> a[i];}for (int i 0; i < k / 2; i) {swap(a[i], a[k - 1 - i]);}for (int i 0…...

面试官:聊聊 nextTick
前言 在最近的面试中,不少面试官叫我聊聊 nextTick,nextTick 是个啥,这篇文章咱来好好聊聊! 我的回答 nextTick 是官方提供的一个异步方法,用于在 DOM 更新之后执行回调。正好在我的项目中用到了,就拿它来形容一下,大概的场景是渲染一个列表,每次点击按钮就会往列表后…...
)
shell编程之条件语句(shell脚本)
条件测试操作 要使shell脚本程序具备一定的“智能”,面临的第一个问题就是如何区分不同的情况以确定执行何种操作。例如,当磁盘使用率超过95%时,发送告警信息;当备份目录不存在时,能够自动创建;当源码编译程序时,若配置失败则不再继续安装等。 shell环境根据命令执行后…...

QT中QSettings的使用系列之二:保存和恢复应用程序主窗口
1、核心代码 #include "widget.h" #include "ui_widget.h" #include <QSettings> #include <QDebug> #include <QColo...

Linux系统上安装Miniconda并安装特定版本的Python
要在Linux系统上安装Miniconda并安装特定版本的Python(例如3.10.12),请按照以下步骤进行操作: 1. 下载并安装Miniconda 下载Miniconda安装脚本: 使用wget或curl下载Miniconda安装脚本。以下是使用wget的命令ÿ…...

解决Qt中 -lGL无法找到的问题
在使用Qt Creator创建并编译新项目时,可能会遇到以下错误: /usr/bin/ld: cannot find -lGL collect2: error: ld returned 1 exit status make: *** [untitled1] Error 1 18:07:41: The process "/usr/bin/make" exited with code 2. Error w…...

【重要】《HTML趣味编程》专栏内资源的下载链接
目录 关于专栏 博主简介 专栏内资源的下载链接 写在后面 关于专栏 本专栏将持续更新,至少含有30个案例,后续随着案例的增加可能会涨价,欢迎大家尽早订阅!(订阅后可查看专栏内所有文章,并且可以下载专栏内的所有资源) 博主简介 ⭐ 2024年百度文心智能体大赛 Top1⭐…...
苍穹外卖环境搭建
一、前端环境搭建 ①整体结构 ②前端工程基于nginx运行 启动nginx:双击 nginx.exe 即可启动 nginx 服务,访问端口号为 80 进入浏览器地址输入locallhost回车 二、后端环境搭建 后端初始工程基于maven进行项目构建,并且进行分模块开发 (1) idea打开初始…...

切割游戏介绍
简介 上大学时,在学校实验室里玩过一个貌似使用VC写的小游戏,一个小球在界面上四处游荡,玩家使用鼠标切割背景,将背景切割剩余到一定的百分比后,就胜利了,后边的背景图会全部展示出来。 使用qt的qml技术&a…...

对接Paypal、Stripe支付简单流程
一、Stripe卡支付简单流程: #mermaid-svg-bZxQh1bt4Z8agjJg {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-bZxQh1bt4Z8agjJg .error-icon{fill:#552222;}#mermaid-svg-bZxQh1bt4Z8agjJg .error-text{fi…...
微服务中不同服务使用openfeign 相互调用
首先 我们上文 已经知道了 nacos 的注册服务,现在 我们 在不同服务中相互调用就可以使用openfeign 直接调用,而不是 再写冗余的调用代码啦 首先 我们的微服务组件如下 因为我这个微服务是我在 员工登录demo 中 拆出来的,在userlogin模块中…...

社区项目-项目介绍环境搭建
文章目录 1.技术选型2.原型设计1.安装AxureRP2.进行汉化3.载入元件库4.基本设计 3.元数建模1.安装元数建模软件2.新建项目3.新增一个刷题模块主题域4.新增数据表 subject_category5.新增关系图,将表拖过来6.新增题目标签表7.新增题目信息表8.新增单选表、多选表、判…...
【论文阅读】-- Omnisketch:高效的多维任意谓词高速流分析
Omnisketch:高效的多维任意谓词高速流分析 摘要1 引言2 预备知识及相关工作3 OMNISKETCH:使用任意谓词估计频率3.1 Sketch S0:Count-Min with rid-sets 用于估计带有谓词的查询3.2 Sketch S1 (OmniSketch):…...

【ajax核心03】封装底层axios函数
目录 一:步骤总结 二:获取数据需求: 三:查找数据需求: 四:发送数据需求: 一:步骤总结 定义myAxios函数,接收配置对象,返回Promise对象发送XHR请求&#…...

python科学计算
文章目录 一、科学计算介绍二、NumPy2.1、NumPy是什么2.2、NumPy使用场景2.3、NumPy特点2.4、NumPy如何使用 三、数组3.1、数组介绍3.2、创建数组3.3、数组的大小3.4、通过索引访问数组3.5、变换数组的形态3.6、常用的ufunc运算 一、科学计算介绍 python语言提供了array模块&am…...
Leetcode - 132双周赛
目录 一、3174. 清除数字 二、3175. 找到连续赢 K 场比赛的第一位玩家 三、3176. 求出最长好子序列 I 四、3177. 求出最长好子序列 II 一、3174. 清除数字 本题可以使用栈来模拟,遇到数字弹出栈顶元素,遇到字母入栈。 代码如下: //使用字…...

Mongodb在UPDATE操作中使用$push向数组中插入数据
学习mongodb,体会mongodb的每一个使用细节,欢迎阅读威赞的文章。这是威赞发布的第69篇mongodb技术文章,欢迎浏览本专栏威赞发布的其他文章。如果您认为我的文章对您有帮助或者解决您的问题,欢迎在文章下面点个赞,或者关…...

ArcGIS JSAPI 高级教程 - ArcGIS Maps SDK for JavaScript - 锐化效果
ArcGIS JSAPI 高级教程 - ArcGIS Maps SDK for JavaScript - 锐化效果 核心代码完整代码在线示例ArcGIS Maps SDK for JavaScript 从 4.29 开始增加 RenderNode 类,可以添加数据以及操作 FBO(ManagedFBO); 通过操作 FBO,可以通过后处理实现很多效果,官方提供了几个示例,…...
信息系统项目管理师 | 信息系统安全技术
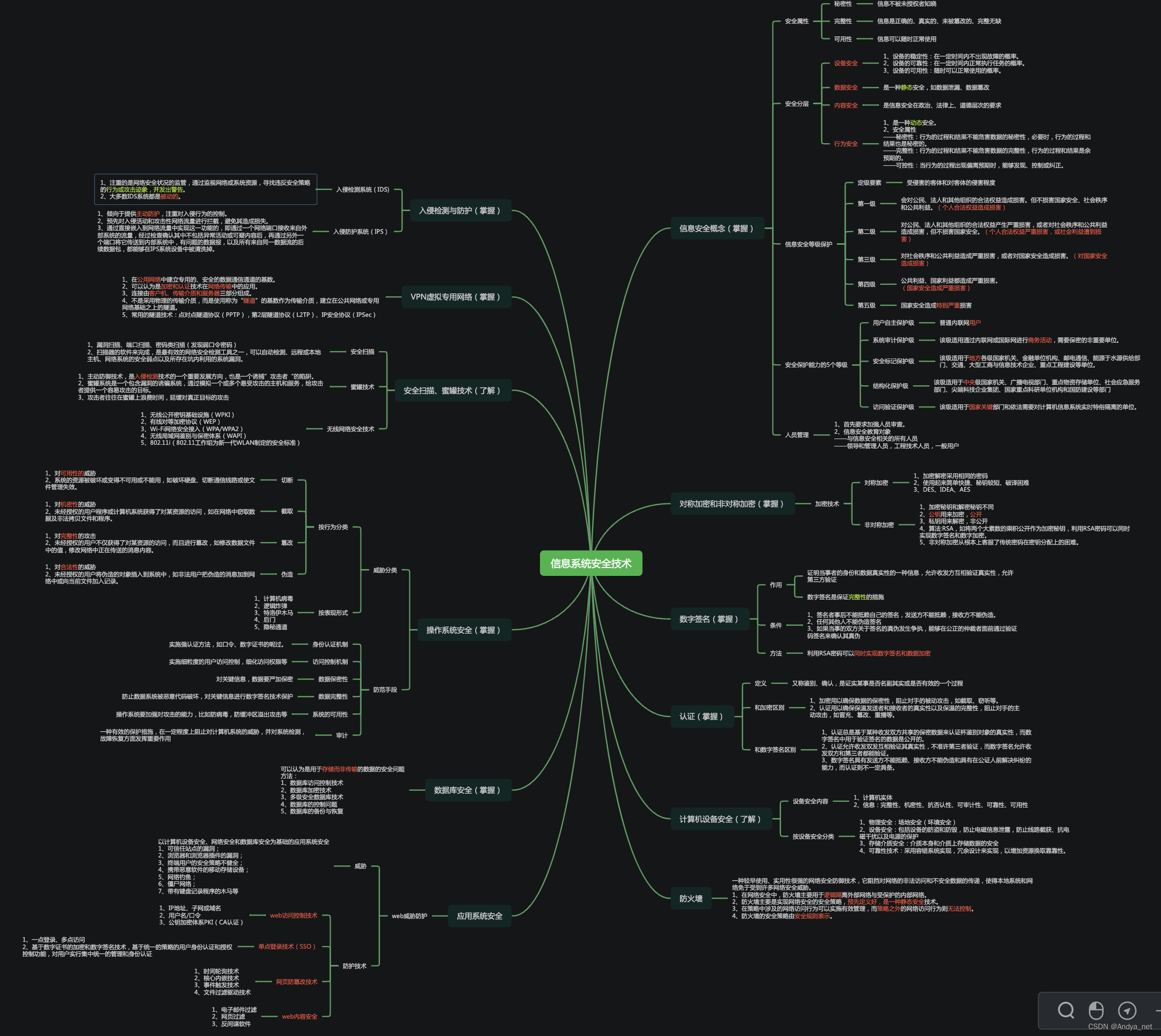
关注WX:CodingTechWork 信息安全概念 安全属性 秘密性:信息不被未授权者知晓。完整性:信息是正确的、真实的、未被篡改的、完整无缺。可用性:信息可以随时正常使用。 安全分层 设备安全 设备的稳定性:在一定时间…...

Youtu-VL-4B从零开始:腾讯优图视觉语言模型完整部署指南
Youtu-VL-4B从零开始:腾讯优图视觉语言模型完整部署指南 想让你的电脑真正“看懂”图片吗?想象一下,上传一张照片,它不仅能告诉你画面里有什么,还能数清楚有几只猫、几只狗,甚至能分析一张复杂的图表&…...
)
3分钟搞定x-anylabeling标注数据转Labelme格式(附完整Python脚本)
3分钟实现x-anylabeling到Labelme格式的高效转换方案 在计算机视觉项目的实际开发中,数据标注格式的兼容性问题常常成为阻碍工作流顺畅进行的绊脚石。当团队使用x-anylabeling完成初步标注后,若需在Labelme环境中继续编辑或利用其丰富插件生态时…...

nomic-embed-text-v2-moe实操指南:嵌入服务健康检查与延迟监控方案
nomic-embed-text-v2-moe实操指南:嵌入服务健康检查与延迟监控方案 1. 模型简介与核心优势 nomic-embed-text-v2-moe是一款强大的多语言文本嵌入模型,专门为高效的多语言检索任务设计。这个模型在多个关键指标上表现出色,特别适合需要处理多…...

新手必看:Phi-3-Mini-128K部署实战,仿ChatGPT界面5分钟搞定
新手必看:Phi-3-Mini-128K部署实战,仿ChatGPT界面5分钟搞定 你是不是也对那些动辄需要几十GB显存、部署过程复杂的大语言模型望而却步?想体验一下AI对话的魅力,却苦于没有高性能的显卡和复杂的配置经验? 今天&#x…...
 - Cursor 高级功能实战解析)
AI编程专栏(三) - Cursor 高级功能实战解析
1. Cursor自定义模式深度解析 第一次接触Cursor的自定义模式时,我就像拿到了一把瑞士军刀却只会用开瓶器。这个功能远不止是简单的预设模板,而是能彻底改变你与AI协作方式的利器。想象一下,你可以为不同项目定制专属的AI助手——前端项目有个…...

Rust新手避坑指南:Windows+VSCode环境搭建中的5个常见问题及解决方法
Rust新手避坑指南:WindowsVSCode环境搭建中的5个常见问题及解决方法 第一次在Windows上配置Rust开发环境时,那种"明明按教程操作却总差一步"的挫败感我至今记忆犹新。rustup-init的选项选择、VSCode终端突然不认识cargo命令、rust-analyzer插件…...

2026年塑料托盘粉碎机实力榜:TOP3厂家谁更胜一筹?
在再生资源加工领域,塑料托盘粉碎机作为核心设备,其性能直接影响企业产能与成本控制。据行业数据显示,2025年国内塑料回收市场规模突破1200亿元,但设备能耗高、故障率高、智能化不足等问题仍困扰超60%的从业者。本文基于技术参数、…...

Oracle数据库降低水位线
一.问题现在product01.ora数据文件,总大小为32000(3.2万)MB,但是实际只用了800MB。这种情况下,我缩小这个数据文件,却报错如下。分析原因:井确实有100米,水只在10米处,但…...

金融学考研笔记三
第三讲 国际收支与国际资本流动第一节 国际收支一、国际收支国际收支是在一定时期内一个国家或地区与其他国家或地区之间进行的全部经济交易的系统记录。国际收支记录的是对外的交往,即一国居民与非居民之间的交往。居民是指在一个国家经济领土内具有经济利益的经济…...

springboot党员之家服务系统 微信小程序毕业论文
目录摘要第一章 绪论第二章 系统需求分析第三章 系统设计第四章 系统实现第五章 系统测试第六章 总结与展望参考文献致谢项目技术支持源码LW获取详细视频演示 :文章底部获取博主联系方式!同行可合作摘要 简要介绍系统开发背景、目标、技术栈(…...