【摄像头标定】双目摄像头标定及矫正-opencv(python)
双目摄像头标定及矫正
- 棋盘格标定板
- 标定
- 矫正
棋盘格标定板
本文使用棋盘格标定板,可以到这篇博客中下载:https://blog.csdn.net/qq_39330520/article/details/107864568
标定
要进行标定首先需要双目拍的棋盘格图片,20张左右,由于本文的双目摄像头嵌入在开发板底板中,并且使用的是ros进行开发,所以对于大部分人拍照这里是没有参考价值的,对于也是使用ros开发的小伙伴,需要写一个节点发布双目摄像头的图像数据,然后再写一个节点订阅双目摄像头数据进行拍照保存。本文重点也不在拍照,对于其他小伙伴可以直接搜索一些适用的拍照方法,只要能获得到图片即可。
左摄像头图片如下:

右摄像头图片如下:
由于摄像头底层代码有问题,所以图像很暗,但不影响标定。
标定代码如下:
import cv2
import os
import numpy as np
import itertools
import yaml# 定义文件夹路径
left_folder = "C:/new_pycharm_project/yolov10-main/shuangmu_left_pic"
right_folder = "C:/new_pycharm_project/yolov10-main/shuangmu_right_pic"# 获取图像文件列表并排序
left_images = sorted(os.listdir(left_folder))
right_images = sorted(os.listdir(right_folder))# 确保左右相机图像数量一致
assert len(left_images) == len(right_images), "左右相机图像数量不一致"# 加载两个摄像头图片文件夹并将里面的彩图转换为灰度图
def load_images(folder, images):img_list = []for img_name in images:img_path = os.path.join(folder, img_name)frame = cv2.imread(img_path)if frame is not None:gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)img_list.append((frame, gray))else:print(f"无法读取图像: {img_path}")return img_list# 检测棋盘格角点
def get_corners(imgs, pattern_size):corners = []for frame, gray in imgs:ret, c = cv2.findChessboardCorners(gray, pattern_size) #ret 表示是否成功找到棋盘格角点,c 是一个数组,包含了检测到的角点的坐标if not ret:print("未能检测到棋盘格角点")continuec = cv2.cornerSubPix(gray, c, (5, 5), (-1, -1),(cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)) #cv2.cornerSubPix 函数用于提高棋盘格角点的精确度,对初始检测到的角点坐标 c 进行优化corners.append(c) #将优化后的角点坐标 c 添加到 corners 列表中# 绘制角点并显示vis = frame.copy()cv2.drawChessboardCorners(vis, pattern_size, c, ret)new_size = (1280, 800)resized_img = cv2.resize(vis, new_size)cv2.imshow('Corners', resized_img)cv2.waitKey(150)return corners# 相机标定
def calibrate_camera(object_points, corners, imgsize):cm_input = np.eye(3, dtype=np.float32)ret = cv2.calibrateCamera(object_points, corners, imgsize, cm_input, None)return retdef save_calibration_to_yaml(file_path, cameraMatrix_l, distCoeffs_l, cameraMatrix_r, distCoeffs_r, R, T, E, F):data = {'camera_matrix_left': {'rows': 3,'cols': 3,'dt': 'd','data': cameraMatrix_l.flatten().tolist()},'dist_coeff_left': {'rows': 1,'cols': 5,'dt': 'd','data': distCoeffs_l.flatten().tolist()},'camera_matrix_right': {'rows': 3,'cols': 3,'dt': 'd','data': cameraMatrix_r.flatten().tolist()},'dist_coeff_right': {'rows': 1,'cols': 5,'dt': 'd','data': distCoeffs_r.flatten().tolist()},'R': {'rows': 3,'cols': 3,'dt': 'd','data': R.flatten().tolist()},'T': {'rows': 3,'cols': 1,'dt': 'd','data': T.flatten().tolist()},'E': {'rows': 3,'cols': 3,'dt': 'd','data': E.flatten().tolist()},'F': {'rows': 3,'cols': 3,'dt': 'd','data': F.flatten().tolist()}}with open(file_path, 'w') as file:yaml.dump(data, file, default_flow_style=False)print(f"Calibration parameters saved to {file_path}")img_left = load_images(left_folder, left_images) #img_left是个列表,存放左摄像头所有的灰度图片。
img_right = load_images(right_folder, right_images)
pattern_size = (8, 5)
corners_left = get_corners(img_left, pattern_size) #corners_left的长度表示检测到棋盘格角点的图像数量。corners_left[i] 和 corners_right[i] 中存储了第 i 张图像检测到的棋盘格角点的二维坐标。
corners_right = get_corners(img_right, pattern_size)
cv2.destroyAllWindows()# 断言,确保所有图像都检测到角点
assert len(corners_left) == len(img_left), "有图像未检测到左相机的角点"
assert len(corners_right) == len(img_right), "有图像未检测到右相机的角点"# 准备标定所需数据
points = np.zeros((8 * 5, 3), dtype=np.float32) #创建40 行 3 列的零矩阵,用于存储棋盘格的三维坐标点。棋盘格的大小是 8 行 5 列,40 个角点。数据类型为 np.float32,这是一张图的,因为一个角点对应一个三维坐标
points[:, :2] = np.mgrid[0:8, 0:5].T.reshape(-1, 2) * 21 #给这些点赋予实际的物理坐标,* 21 是因为每个棋盘格的大小为 21mmobject_points = [points] * len(corners_left) #包含了所有图像中棋盘格的三维物理坐标点 points。这里假设所有图像中棋盘格的物理坐标是相同的,因此用 points 复制 len(corners_left) 次。
imgsize = img_left[0][1].shape[::-1] #img_left[0] 是左相机图像列表中的第一张图像。img_left[0][1] 是该图像的灰度图像。shape[::-1] 取灰度图像的宽度和高度,并反转顺序,以符合 calibrateCamera 函数的要求。print('开始左相机标定')
ret_l = calibrate_camera(object_points, corners_left, imgsize) #object_points表示标定板上检测到的棋盘格角点的三维坐标;corners_left[i]表示棋盘格角点在图像中的二维坐标;imgsize表示图像大小
retval_l, cameraMatrix_l, distCoeffs_l, rvecs_l, tvecs_l = ret_l[:5] #返回值里就包含了标定的参数print('开始右相机标定')
ret_r = calibrate_camera(object_points, corners_right, imgsize)
retval_r, cameraMatrix_r, distCoeffs_r, rvecs_r, tvecs_r = ret_r[:5]# 立体标定,得到左右相机的外参:旋转矩阵、平移矩阵、本质矩阵、基本矩阵
print('开始立体标定')
criteria_stereo = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 1e-5)
ret_stereo = cv2.stereoCalibrate(object_points, corners_left, corners_right,cameraMatrix_l, distCoeffs_l,cameraMatrix_r, distCoeffs_r,imgsize, criteria=criteria_stereo,flags=cv2.CALIB_FIX_INTRINSIC)
ret, _, _, _, _, R, T, E, F = ret_stereo# 输出结果
print("左相机内参:\n", cameraMatrix_l)
print("左相机畸变系数:\n", distCoeffs_l)
print("右相机内参:\n", cameraMatrix_r)
print("右相机畸变系数:\n", distCoeffs_r)
print("旋转矩阵 R:\n", R)
print("平移向量 T:\n", T)
print("本质矩阵 E:\n", E)
print("基本矩阵 F:\n", F)
print("标定完成")# 保存标定结果
save_calibration_to_yaml('calibration_parameters.yaml', cameraMatrix_l, distCoeffs_l, cameraMatrix_r, distCoeffs_r, R, T, E, F)# 计算重投影误差
def compute_reprojection_errors(objpoints, imgpoints, rvecs, tvecs, mtx, dist):total_error = 0total_points = 0for i in range(len(objpoints)):imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist)error = cv2.norm(imgpoints[i], imgpoints2, cv2.NORM_L2) / len(imgpoints2)total_error += errortotal_points += len(imgpoints2)mean_error = total_error / total_pointsreturn mean_error# 计算并打印左相机和右相机的重投影误差
print("左相机重投影误差: ", compute_reprojection_errors(object_points, corners_left, rvecs_l, tvecs_l, cameraMatrix_l, distCoeffs_l))
print("右相机重投影误差: ", compute_reprojection_errors(object_points, corners_right, rvecs_r, tvecs_r, cameraMatrix_r, distCoeffs_r))# 立体矫正和显示
def stereo_rectify_and_display(img_l, img_r, cameraMatrix_l, distCoeffs_l, cameraMatrix_r, distCoeffs_r, R, T):img_size = img_l.shape[:2][::-1]# 立体校正R1, R2, P1, P2, Q, _, _ = cv2.stereoRectify(cameraMatrix_l, distCoeffs_l, cameraMatrix_r, distCoeffs_r, img_size, R, T)map1x, map1y = cv2.initUndistortRectifyMap(cameraMatrix_l, distCoeffs_l, R1, P1, img_size, cv2.CV_32FC1)map2x, map2y = cv2.initUndistortRectifyMap(cameraMatrix_r, distCoeffs_r, R2, P2, img_size, cv2.CV_32FC1)# 图像矫正rectified_img_l = cv2.remap(img_l, map1x, map1y, cv2.INTER_LINEAR)rectified_img_r = cv2.remap(img_r, map2x, map2y, cv2.INTER_LINEAR)# 显示矫正后的图像combined_img = np.hstack((rectified_img_l, rectified_img_r))cv2.imshow('Rectified Images', combined_img)cv2.imwrite("stereo_jiaozheng.png",combined_img)cv2.waitKey(0)cv2.destroyAllWindows()# 加载并矫正示例图像
example_idx = 0
img_l = img_left[example_idx][0]
img_r = img_right[example_idx][0]
stereo_rectify_and_display(img_l, img_r, cameraMatrix_l, distCoeffs_l, cameraMatrix_r, distCoeffs_r, R, T)
标定完成后会显示一张矫正后的图像。代码重要的地方都给出了注释,主要流程就是分别对左右相机进行标定,然后对两个相机进行联合标定(立体标定),最后得到的参数会保存到yaml文件中:
---
camera_matrix_left:rows: 3cols: 3dt: ddata:- 531.7200210313852- 0- 642.0170539101581- 0- 533.6471323984354- 420.4033045027399- 0- 0- 1
dist_coeff_left:rows: 1cols: 5dt: ddata:- -0.1670007968198256- 0.04560028196221921- 0.0011938487550718078- -0.000866537907860316- -0.00805042100882671
camera_matrix_right:rows: 3cols: 3dt: ddata:- 525.9058345430292- 0- 628.7761214904813- 0- 528.2078922687268- 381.8575789135264- 0- 0- 1
dist_coeff_right:rows: 1cols: 5dt: ddata:- -0.15320688387351564- 0.03439886104586617- -0.0003732170677440928- -0.0024909528446780153- -0.005138400994014348
R:rows: 3cols: 3dt: ddata:- 0.9999847004116569- -0.00041406631566505544- 0.005516112008926496- 0.0003183979929468572- 0.9998497209492369- 0.017333036100216304- -0.005522460079247196- -0.017331014592906722- 0.9998345554979852
T:rows: 3cols: 1dt: ddata:- -55.849260376265015- 2.1715925432988743- 0.46949841441903933
E:rows: 3cols: 3dt: ddata:- -0.012142020481601675- -0.5070637607007459- 2.1630954322858496- 0.1610659204031652- -0.9681187500627653- 55.84261022903612- -2.189341611238282- -55.83996821910631- -0.9800159939787676
F:rows: 3cols: 3dt: ddata:- -2.4239149875305048e-8- -0.0000010085973649868748- 0.0027356495714066175- 3.2013501988129346e-7- -0.0000019172863951399893- 0.05961765359743852- -0.002405523166325036- -0.057046539240958545- 1分别是左相机的内参矩阵、畸变系数,右相机的内参矩阵和畸变系数,两个相机之间的旋转矩阵、平移矩阵、本质矩阵、基本矩阵。
矫正
import cv2
import yaml
import numpy as np# 定义函数读取标定数据
def read_calibration_data(calibration_file):with open(calibration_file, 'r') as f:calib_data = yaml.safe_load(f)cameraMatrix_l = np.array(calib_data['camera_matrix_left']['data']).reshape(3, 3)distCoeffs_l = np.array(calib_data['dist_coeff_left']['data'])cameraMatrix_r = np.array(calib_data['camera_matrix_right']['data']).reshape(3, 3)distCoeffs_r = np.array(calib_data['dist_coeff_right']['data'])R = np.array(calib_data['R']['data']).reshape(3, 3)T = np.array(calib_data['T']['data']).reshape(3, 1)return cameraMatrix_l, distCoeffs_l, cameraMatrix_r, distCoeffs_r, R, T# 定义函数对图像进行矫正
def rectify_images(left_image_path, right_image_path, calibration_file):# 读取标定数据cameraMatrix_l, distCoeffs_l, cameraMatrix_r, distCoeffs_r, R, T = read_calibration_data(calibration_file)# 读取左右图像img_left = cv2.imread(left_image_path)img_right = cv2.imread(right_image_path)# 获取图像尺寸(假设左右图像尺寸相同)img_size = img_left.shape[:2][::-1]# 立体校正R1, R2, P1, P2, Q, roi1, roi2 = cv2.stereoRectify(cameraMatrix_l, distCoeffs_l,cameraMatrix_r, distCoeffs_r,img_size, R, T)# 计算映射参数map1_l, map2_l = cv2.initUndistortRectifyMap(cameraMatrix_l, distCoeffs_l, R1, P1, img_size, cv2.CV_32FC1)map1_r, map2_r = cv2.initUndistortRectifyMap(cameraMatrix_r, distCoeffs_r, R2, P2, img_size, cv2.CV_32FC1)# 应用映射并显示结果rectified_img_l = cv2.remap(img_left, map1_l, map2_l, cv2.INTER_LINEAR)rectified_img_r = cv2.remap(img_right, map1_r, map2_r, cv2.INTER_LINEAR)# 合并图像显示combined_img = np.hstack((rectified_img_l, rectified_img_r))cv2.imshow('Rectified Images', combined_img)cv2.waitKey(0)cv2.destroyAllWindows()# 设置路径和文件名
left_image_path = "C:/new_pycharm_project/yolov10-main/shuangmu_left_pic/left_image0.png"
right_image_path = "C:/new_pycharm_project/yolov10-main/shuangmu_right_pic/right_image0.png"
calibration_file = "C:/new_pycharm_project/yolov10-main/calibration_parameters.yaml"# 调用函数进行图像矫正
rectify_images(left_image_path, right_image_path, calibration_file)结果对比:


第一张是矫正前的左右相机图像,第二张是矫正后的。可以看到去除了畸变,并且两图像基本出于同一水平线。
相关文章:
【摄像头标定】双目摄像头标定及矫正-opencv(python)
双目摄像头标定及矫正 棋盘格标定板标定矫正 棋盘格标定板 本文使用棋盘格标定板,可以到这篇博客中下载:https://blog.csdn.net/qq_39330520/article/details/107864568 标定 要进行标定首先需要双目拍的棋盘格图片,20张左右,…...
)
PostgreSQL 高可用性与容错性(十三)
1. 备份与恢复策略 1.1 数据备份 1.1.1 基于 pg_dump 的逻辑备份 pg_dump -U username -d dbname -f backup_file.sql 1.1.2 基于 pg_basebackup 的物理备份 pg_basebackup -U username -D /path/to/backup/directory -Ft -Xs -P -R 1.2 恢复数据库 1.2.1 恢复逻辑备份 …...
RabbitMQ的WorkQueues模型
WorkQueues模型 Work queues,任务模型。简单来说就是让多个消费者绑定到一个队列,共同消费队列中的消息。 当消息处理比较耗时的时候,可能生产消息的速度会远远大于消息的消费速度。长此以往,消息就会堆积越来越多,…...

【LeetCode】每日一题:最大子数组和
给你一个整数数组 nums ,请你找出一个具有最大和的连续子数组(子数组最少包含一个元素),返回其最大和。 子数组是数组中的一个连续部分。 解题思路 要注意最小值是整个前缀,主要是cumsum然后按照买卖股票的思路做的&a…...
什么是进程?
前言👀~ 上一章我们介绍了计算机组成的入门知识,了解这些之后,今天来聊聊进程 进程 PCB pcb中的常见属性 进程调度 进程的状态 进程的优先级 上下文 记账信息 虚拟地址空间 如果各位对文章的内容感兴趣的话,请点点小赞&a…...

后端返回base64文件流下载
后端返回base64文件流: 前端处理: downloadTemplate () {this.$API.downloadTemplate().then(({ data }) > {const binaryString atob(data) // 解码base64字符串const byteArray new Uint8Array(binaryString.length) // 创建一个Uint8Arrayfor (let i 0; i…...

云原生面试
云原生面试 Kubernetes原理Kubernetes 如何保证集群的安全性。简述 Kubernetes 准入机制简述Kubernetes Secret 有哪些使用方式简述Kubernetes PodSecurityPolicy机制简述Kubernetes PodSecurityPolicy机制能实现哪些安全策略简述Kubernetes 网络策略原理简述Kubernetes 数据持…...
深度学习入门2—— 神经网络的组成和3层神经网络的实现
由上一章结尾,我们知道神经网络的一个重要性质是它可以自动地从数据中学习到合适的权重参数。接下来会介绍神经网络的概要,然后再结合手写数字识别案例进行介绍。 1.神经网络概要 1.1从感知机到神经网 我们可以用图来表示神经网络,我们把最…...
tensorflow学习:错误 InternalError: Dst tensor is not initialized
tensorflow学习:错误 InternalError: Dst tensor is not initialized_dst tensor is not initialized.-CSDN博客https://blog.csdn.net/wanglitao588/article/details/77033659...

Docker环境安装anythingllm
拉镜像 docker pull mintplexlabs/anythingllm建目录 export STORAGE_LOCATION$HOME/anythingllm && \ mkdir -p $STORAGE_LOCATION && \ touch "$STORAGE_LOCATION/.env"检查目录具有写权限 # 为目录anythingllm赋写权限 chmod 777 anythingllm 启…...

FEC 向前纠错编码
随写,看的有点杂,简单记一下。 应该叫ReedSolomon FEC RS算法简单来讲就是,根据已有数据,构造模型,然后根据模型判纠错? 简单来讲,两点确定一条直线,直线直线上的点都会满足 y kx…...
【jupyter notebook】解决打不开以及安装扩展插件的问题
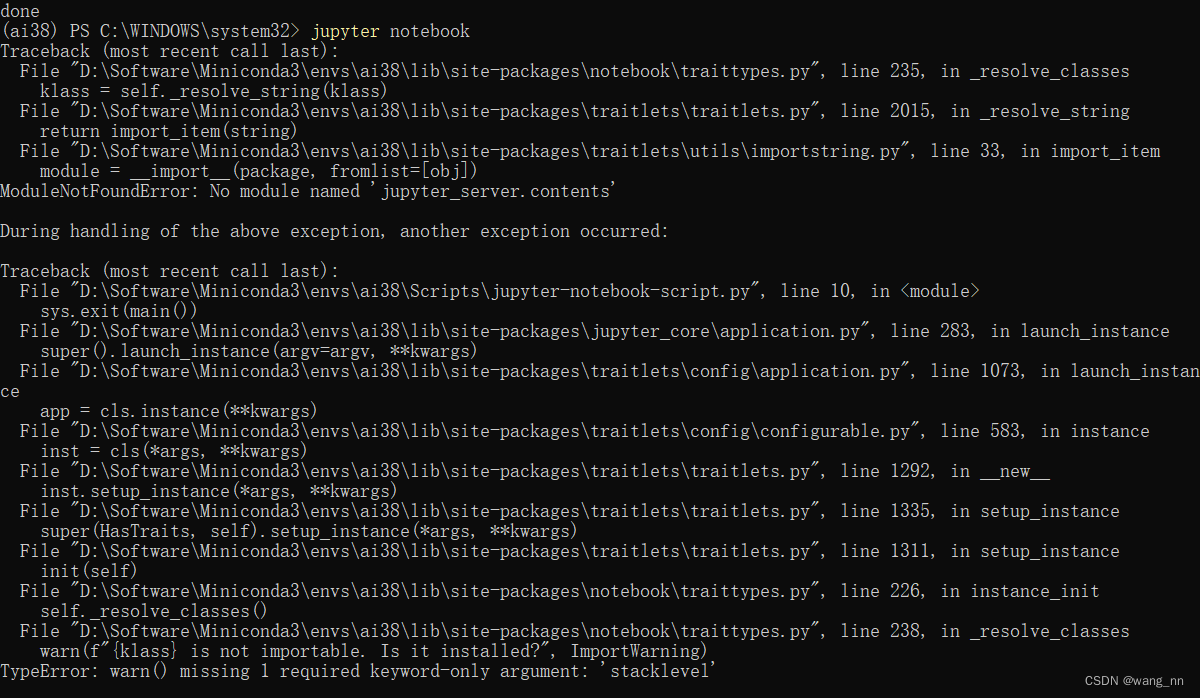
文章目录 问题描述问题 1解决问题 2解决 问题描述 问题 1 在自定义的虚拟环境下,安装 jupyter notebook 6.4.12 版本时,报以下错误: 解决 查了一些 解决方法,执行以下命令即可解决: conda install traitlets5.9.0 …...

Perl文件句柄深度解析:掌握文件操作的核心
Perl中的文件句柄是进行文件输入输出操作的关键。它们提供了一种机制,允许Perl脚本打开文件、读写数据、定位文件指针,以及关闭文件。理解文件句柄的使用对于编写高效的Perl脚本至关重要。本文将深入探讨Perl文件句柄的概念、使用方法和最佳实践。 1. 文…...
Tomcat 下载部署到 idea
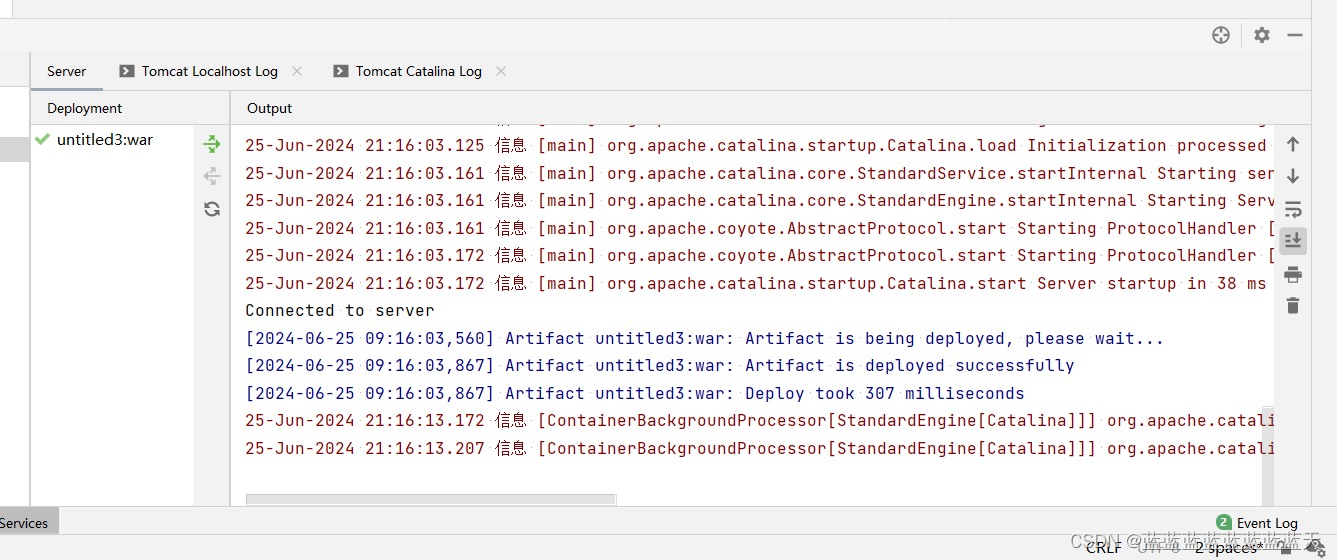
一、下载Tomcat Tomcat 是Apache 软件基金会(Apache Software Foundation)下的一个核心项目,免费开源、并支持Servlet 和JSP 规范。属于轻量级应用服务器,在中小型系统和并发访问用户不是很多的场合下被普遍使用,是开发…...

FutureTask如何使用?
FutureTask是Java中的一个具体类,它实现了RunnableFuture接口,该接口结合了Runnable和Future的功能。FutureTask可以用于表示一个可以取消的异步计算。FutureTask非常适合用于与Executor框架一起使用,但也可以单独使用。 FutureTask的基本用…...
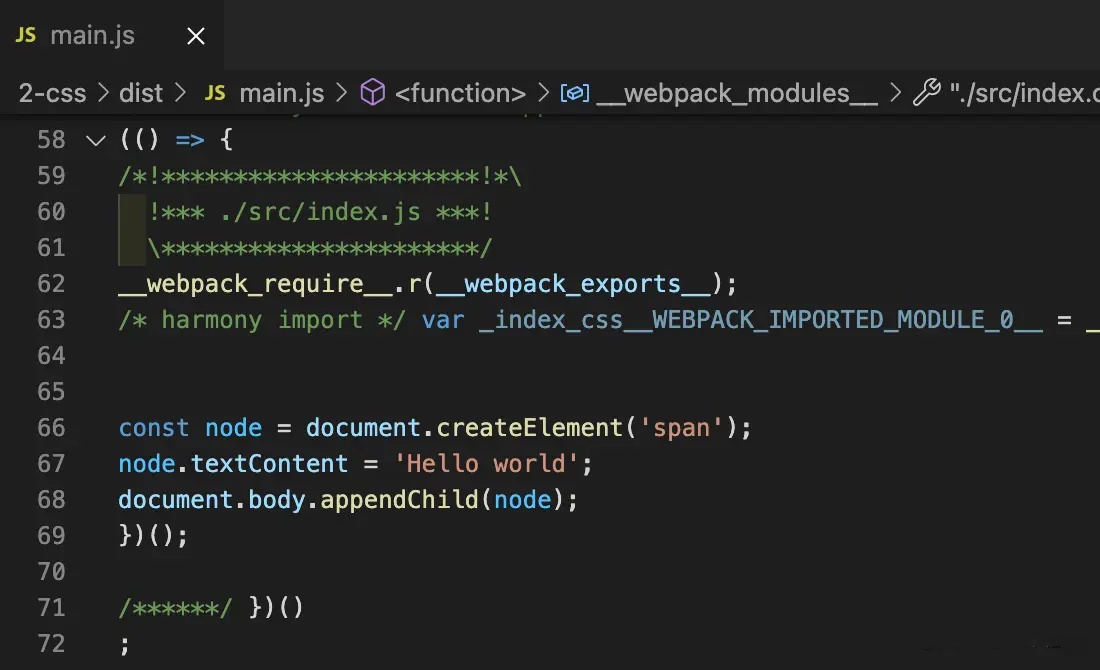
Webpack: 如何借助预处理器、PostCSS 等构建现代 CSS 工程环境
概述 在开发 Web 应用时,我们通常需要编写大量 JavaScript 代码 —— 用于控制页面逻辑;编写大量 CSS 代码 —— 用于调整页面呈现形式。问题在于,CSS 语言在过去若干年中一直在追求样式表现力方面的提升,工程化能力薄弱ÿ…...

一篇文章告诉你如何正确使用chatgpt提示词
在chatgpt大火的时候,出现了一波学习chatgpt提示词的热潮,互联网出现很多了使用的学习提示词的课程。其中我觉得斯坦福大学教授吴恩达博士推出prompt engineer课最全面。接下来总结他课程中正确使用提示词工程的方法。 1. 明确目标 明确你希望ChatGPT完…...

qt基于QGraphicsView的屏幕旋转
一、代码实现 实现代码示例 MainWindow2 w;QGraphicsScene *scene new QGraphicsScene;QGraphicsProxyWidget *gw scene->addWidget(&w);// 旋转角度gw->setRotation(90);QGraphicsView *view new QGraphicsView(scene);//view->resize(1024, 600);//scene-&g…...
一个土木工程专业背景的开发者,讲述开源带给他的力量
在前段时间我们举办的“TDengine Open Day”第一季技术沙龙中,TDengine 应用研发高级工程师谭雪峰进行的“开源之路:程序员的成长与探索”主题分享获得了众多参会者的好评。谭雪峰从自身独特的职业发展经历出发,分享了自己在开源领域的种种收…...
express+vue在线im实现【四】
往期内容 expressvue在线im实现【一】 expressvue在线im实现【二】 expressvue在线im实现【三】 本期示例 本期总结 支持了音频的录制和发送,如果觉得对你有用,还请点个免费的收藏与关注 下期安排 在线语音 具体实现 <template><kl-dial…...
)
论文解读:交大港大上海AI Lab开源论文 | 宇树机器人多姿态起立控制强化学习框架(二)
HoST框架核心实现方法详解 - 论文深度解读(第二部分) 《Learning Humanoid Standing-up Control across Diverse Postures》 系列文章: 论文深度解读 + 算法与代码分析(二) 作者机构: 上海AI Lab, 上海交通大学, 香港大学, 浙江大学, 香港中文大学 论文主题: 人形机器人…...
HTML 列表、表格、表单
1 列表标签 作用:布局内容排列整齐的区域 列表分类:无序列表、有序列表、定义列表。 例如: 1.1 无序列表 标签:ul 嵌套 li,ul是无序列表,li是列表条目。 注意事项: ul 标签里面只能包裹 li…...
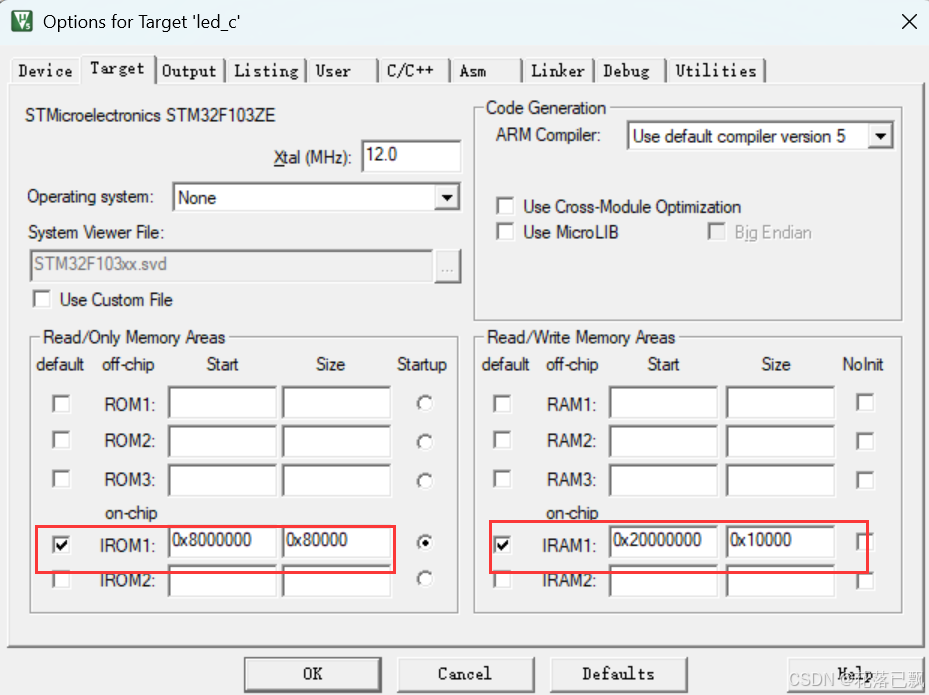
Keil 中设置 STM32 Flash 和 RAM 地址详解
文章目录 Keil 中设置 STM32 Flash 和 RAM 地址详解一、Flash 和 RAM 配置界面(Target 选项卡)1. IROM1(用于配置 Flash)2. IRAM1(用于配置 RAM)二、链接器设置界面(Linker 选项卡)1. 勾选“Use Memory Layout from Target Dialog”2. 查看链接器参数(如果没有勾选上面…...

Linux云原生安全:零信任架构与机密计算
Linux云原生安全:零信任架构与机密计算 构建坚不可摧的云原生防御体系 引言:云原生安全的范式革命 随着云原生技术的普及,安全边界正在从传统的网络边界向工作负载内部转移。Gartner预测,到2025年,零信任架构将成为超…...

高防服务器能够抵御哪些网络攻击呢?
高防服务器作为一种有着高度防御能力的服务器,可以帮助网站应对分布式拒绝服务攻击,有效识别和清理一些恶意的网络流量,为用户提供安全且稳定的网络环境,那么,高防服务器一般都可以抵御哪些网络攻击呢?下面…...

CSS设置元素的宽度根据其内容自动调整
width: fit-content 是 CSS 中的一个属性值,用于设置元素的宽度根据其内容自动调整,确保宽度刚好容纳内容而不会超出。 效果对比 默认情况(width: auto): 块级元素(如 <div>)会占满父容器…...

代码随想录刷题day30
1、零钱兑换II 给你一个整数数组 coins 表示不同面额的硬币,另给一个整数 amount 表示总金额。 请你计算并返回可以凑成总金额的硬币组合数。如果任何硬币组合都无法凑出总金额,返回 0 。 假设每一种面额的硬币有无限个。 题目数据保证结果符合 32 位带…...
使用Spring AI和MCP协议构建图片搜索服务
目录 使用Spring AI和MCP协议构建图片搜索服务 引言 技术栈概览 项目架构设计 架构图 服务端开发 1. 创建Spring Boot项目 2. 实现图片搜索工具 3. 配置传输模式 Stdio模式(本地调用) SSE模式(远程调用) 4. 注册工具提…...
的使用)
Go 并发编程基础:通道(Channel)的使用
在 Go 中,Channel 是 Goroutine 之间通信的核心机制。它提供了一个线程安全的通信方式,用于在多个 Goroutine 之间传递数据,从而实现高效的并发编程。 本章将介绍 Channel 的基本概念、用法、缓冲、关闭机制以及 select 的使用。 一、Channel…...

作为测试我们应该关注redis哪些方面
1、功能测试 数据结构操作:验证字符串、列表、哈希、集合和有序的基本操作是否正确 持久化:测试aof和aof持久化机制,确保数据在开启后正确恢复。 事务:检查事务的原子性和回滚机制。 发布订阅:确保消息正确传递。 2、性…...