PINN解偏微分方程实例1
PINN解偏微分方程实例1
- 1. PINN简介
- 2. 偏微分方程实例
- 3. 基于pytorch实现代码
- 4. 数值解
- 参考资料
1. PINN简介
PINN是一种利用神经网络求解偏微分方程的方法,其计算流程图如下图所示,这里以偏微分方程(1)为例。
∂u∂t+u∂u∂x=v∂2u∂x2\begin{align} \frac{\partial u}{\partial t}+u \frac{\partial u}{\partial x}=v\frac{\partial^2 u}{\partial x^2} \end{align} ∂t∂u+u∂x∂u=v∂x2∂2u
神经网络输入位置x,y,z和时间t的值,预测偏微分方程解u在这个时空条件下的数值解。
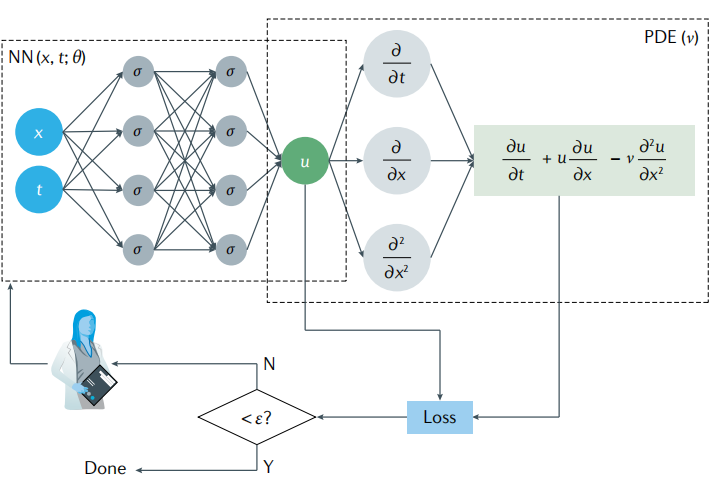
上图中可以看出,PINN的损失函数包含两部分内容,一部分是来源于训练数据误差,另一部分来源于偏微分方程误差,可以记作(2)式。
l=wdataldata+wPDElPDE\begin{align} \mathcal{l} = w_{data}\mathcal{l}_{data}+w_{PDE}\mathcal{l}_{PDE} \end{align} l=wdataldata+wPDElPDE
其中
ldata=1Ndata∑i=1Ndata(u(xi,ti)−ui)2lPDE=1Ndata∑j=1NPDE(∂u∂t+u∂u∂x−v∂2u∂x2)2∣(xj,tj)\begin{align} \begin{aligned} \mathcal{l}_{data} &= \frac{1}{N_{data}}\sum_{i=1}^{N_{data}} (u(x_i,t_i)-u_i)^2 \\ \mathcal{l}_{PDE} &= \frac{1}{N_{data}}\sum_{j=1}^{N_{PDE}} \left( \frac{\partial u}{\partial t}+u \frac{\partial u}{\partial x}-v\frac{\partial^2 u}{\partial x^2} \right)^2|_{(x_j,t_j)} \end{aligned} \end{align} ldatalPDE=Ndata1i=1∑Ndata(u(xi,ti)−ui)2=Ndata1j=1∑NPDE(∂t∂u+u∂x∂u−v∂x2∂2u)2∣(xj,tj)
2. 偏微分方程实例
考虑偏微分方程如下:
∂2u∂x2−∂4u∂y4=(2−x2)e−y\begin{align} \begin{aligned} \frac{\partial^2 u}{\partial x^2} - \frac{\partial^4 u}{\partial y^4} = (2-x^2)e^{-y} \end{aligned} \end{align} ∂x2∂2u−∂y4∂4u=(2−x2)e−y
考虑以下边界条件,
uyy(x,0)=x2uyy(x,1)=x2eu(x,0)=x2u(x,1)=x2eu(0,y)=0u(1,y)=e−y\begin{align} \begin{aligned} u_{yy}(x,0) &= x^2 \\ u_{yy}(x,1) &= \frac{x^2}{e} \\ u(x,0) &= x^2 \\ u(x,1) &= \frac{x^2}{e} \\ u(0,y) &= 0 \\ u(1,y) &= e^{-y} \\ \end{aligned} \end{align} uyy(x,0)uyy(x,1)u(x,0)u(x,1)u(0,y)u(1,y)=x2=ex2=x2=ex2=0=e−y
以上偏微分方程真解为u(x,y)=x2e−yu(x,y)=x^2 e^{-y}u(x,y)=x2e−y,在区域[0,1]×[0,1][0,1]\times[0,1][0,1]×[0,1]上随机采样配置点和数据点,其中配置点用来构造PDE损失函数l1,l2,⋯,l7\mathcal{l}_1,\mathcal{l}_2,\cdots,\mathcal{l}_7l1,l2,⋯,l7,数据点用来构造数据损失函数l8\mathcal{l}_8l8.
l1=1N1∑(xi,yi)∈Ω(u^xx(xi,yi;θ)−u^yyyy(xi,yi;θ)−(2−xi2)e−yi)2l2=1N2∑(xi,yi)∈[0,1]×{0}(u^yy(xi,yi;θ)−xi2)2l3=1N3∑(xi,yi)∈[0,1]×{1}(u^yy(xi,yi;θ)−xi2e)2l4=1N4∑(xi,yi)∈[0,1]×{0}(u^(xi,yi;θ)−xi2)2l5=1N5∑(xi,yi)∈[0,1]×{1}(u^(xi,yi;θ)−xi2e)2l6=1N6∑(xi,yi)∈{0}×[0,1](u^(xi,yi;θ)−0)2l7=1N7∑(xi,yi)∈{1}×[0,1](u^(xi,yi;θ)−e−yi)2l8=1N8∑i=1N8(u^(xi,yi;θ)−ui)2\begin{align} \begin{aligned} \mathcal{l}_1 &= \frac{1}{N_1}\sum_{(x_i,y_i)\in\Omega} (\hat{u}_{xx}(x_i,y_i;\theta) - \hat{u}_{yyyy}(x_i,y_i;\theta) - (2-x_i^2)e^{-y_i})^2 \\ \mathcal{l}_2 &= \frac{1}{N_2}\sum_{(x_i,y_i)\in[0,1]\times\{0\}} (\hat{u}_{yy}(x_i,y_i;\theta) - x_i^2)^2 \\ \mathcal{l}_3 &= \frac{1}{N_3}\sum_{(x_i,y_i)\in[0,1]\times\{1\}} (\hat{u}_{yy}(x_i,y_i;\theta) - \frac{x_i^2}{e})^2 \\ \mathcal{l}_4 &= \frac{1}{N_4}\sum_{(x_i,y_i)\in[0,1]\times\{0\}} (\hat{u}(x_i,y_i;\theta) - x_i^2)^2 \\ \mathcal{l}_5 &= \frac{1}{N_5}\sum_{(x_i,y_i)\in[0,1]\times\{1\}} (\hat{u}(x_i,y_i;\theta) - \frac{x_i^2}{e})^2 \\ \mathcal{l}_6 &= \frac{1}{N_6}\sum_{(x_i,y_i)\in\{0\}\times [0,1]}(\hat{u}(x_i,y_i;\theta) - 0)^2 \\ \mathcal{l}_7 &= \frac{1}{N_7}\sum_{(x_i,y_i)\in\{1\}\times [0,1]}(\hat{u}(x_i,y_i;\theta) - e^{-y_i})^2 \\ \mathcal{l}_8 &= \frac{1}{N_{8}}\sum_{i=1}^{N_{8}} (\hat{u}(x_i,y_i;\theta)-u_i)^2 \end{aligned} \end{align} l1l2l3l4l5l6l7l8=N11(xi,yi)∈Ω∑(u^xx(xi,yi;θ)−u^yyyy(xi,yi;θ)−(2−xi2)e−yi)2=N21(xi,yi)∈[0,1]×{0}∑(u^yy(xi,yi;θ)−xi2)2=N31(xi,yi)∈[0,1]×{1}∑(u^yy(xi,yi;θ)−exi2)2=N41(xi,yi)∈[0,1]×{0}∑(u^(xi,yi;θ)−xi2)2=N51(xi,yi)∈[0,1]×{1}∑(u^(xi,yi;θ)−exi2)2=N61(xi,yi)∈{0}×[0,1]∑(u^(xi,yi;θ)−0)2=N71(xi,yi)∈{1}×[0,1]∑(u^(xi,yi;θ)−e−yi)2=N81i=1∑N8(u^(xi,yi;θ)−ui)2
3. 基于pytorch实现代码
"""
A scratch for PINN solving the following PDE
u_xx-u_yyyy=(2-x^2)*exp(-y)
Author: suntao
Date: 2023/2/26
"""
import torch
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3Depochs = 10000 # 训练代数
h = 100 # 画图网格密度
N = 1000 # 内点配置点数
N1 = 100 # 边界点配置点数
N2 = 1000 # PDE数据点def setup_seed(seed):torch.manual_seed(seed)torch.cuda.manual_seed_all(seed)torch.backends.cudnn.deterministic = True# 设置随机数种子
setup_seed(888888)# Domain and Sampling
def interior(n=N):# 内点x = torch.rand(n, 1)y = torch.rand(n, 1)cond = (2 - x ** 2) * torch.exp(-y)return x.requires_grad_(True), y.requires_grad_(True), conddef down_yy(n=N1):# 边界 u_yy(x,0)=x^2x = torch.rand(n, 1)y = torch.zeros_like(x)cond = x ** 2return x.requires_grad_(True), y.requires_grad_(True), conddef up_yy(n=N1):# 边界 u_yy(x,1)=x^2/ex = torch.rand(n, 1)y = torch.ones_like(x)cond = x ** 2 / torch.ereturn x.requires_grad_(True), y.requires_grad_(True), conddef down(n=N1):# 边界 u(x,0)=x^2x = torch.rand(n, 1)y = torch.zeros_like(x)cond = x ** 2return x.requires_grad_(True), y.requires_grad_(True), conddef up(n=N1):# 边界 u(x,1)=x^2/ex = torch.rand(n, 1)y = torch.ones_like(x)cond = x ** 2 / torch.ereturn x.requires_grad_(True), y.requires_grad_(True), conddef left(n=N1):# 边界 u(0,y)=0y = torch.rand(n, 1)x = torch.zeros_like(y)cond = torch.zeros_like(x)return x.requires_grad_(True), y.requires_grad_(True), conddef right(n=N1):# 边界 u(1,y)=e^(-y)y = torch.rand(n, 1)x = torch.ones_like(y)cond = torch.exp(-y)return x.requires_grad_(True), y.requires_grad_(True), conddef data_interior(n=N2):# 内点x = torch.rand(n, 1)y = torch.rand(n, 1)cond = (x ** 2) * torch.exp(-y)return x.requires_grad_(True), y.requires_grad_(True), cond# Neural Network
class MLP(torch.nn.Module):def __init__(self):super(MLP, self).__init__()self.net = torch.nn.Sequential(torch.nn.Linear(2, 32),torch.nn.Tanh(),torch.nn.Linear(32, 32),torch.nn.Tanh(),torch.nn.Linear(32, 32),torch.nn.Tanh(),torch.nn.Linear(32, 32),torch.nn.Tanh(),torch.nn.Linear(32, 1))def forward(self, x):return self.net(x)# Loss
loss = torch.nn.MSELoss()def gradients(u, x, order=1):if order == 1:return torch.autograd.grad(u, x, grad_outputs=torch.ones_like(u),create_graph=True,only_inputs=True, )[0]else:return gradients(gradients(u, x), x, order=order - 1)# 以下7个损失是PDE损失
def l_interior(u):# 损失函数L1x, y, cond = interior()uxy = u(torch.cat([x, y], dim=1))return loss(gradients(uxy, x, 2) - gradients(uxy, y, 4), cond)def l_down_yy(u):# 损失函数L2x, y, cond = down_yy()uxy = u(torch.cat([x, y], dim=1))return loss(gradients(uxy, y, 2), cond)def l_up_yy(u):# 损失函数L3x, y, cond = up_yy()uxy = u(torch.cat([x, y], dim=1))return loss(gradients(uxy, y, 2), cond)def l_down(u):# 损失函数L4x, y, cond = down()uxy = u(torch.cat([x, y], dim=1))return loss(uxy, cond)def l_up(u):# 损失函数L5x, y, cond = up()uxy = u(torch.cat([x, y], dim=1))return loss(uxy, cond)def l_left(u):# 损失函数L6x, y, cond = left()uxy = u(torch.cat([x, y], dim=1))return loss(uxy, cond)def l_right(u):# 损失函数L7x, y, cond = right()uxy = u(torch.cat([x, y], dim=1))return loss(uxy, cond)# 构造数据损失
def l_data(u):# 损失函数L8x, y, cond = data_interior()uxy = u(torch.cat([x, y], dim=1))return loss(uxy, cond)# Trainingu = MLP()
opt = torch.optim.Adam(params=u.parameters())for i in range(epochs):opt.zero_grad()l = l_interior(u) \+ l_up_yy(u) \+ l_down_yy(u) \+ l_up(u) \+ l_down(u) \+ l_left(u) \+ l_right(u) \+ l_data(u)l.backward()opt.step()if i % 100 == 0:print(i)# Inference
xc = torch.linspace(0, 1, h)
xm, ym = torch.meshgrid(xc, xc)
xx = xm.reshape(-1, 1)
yy = ym.reshape(-1, 1)
xy = torch.cat([xx, yy], dim=1)
u_pred = u(xy)
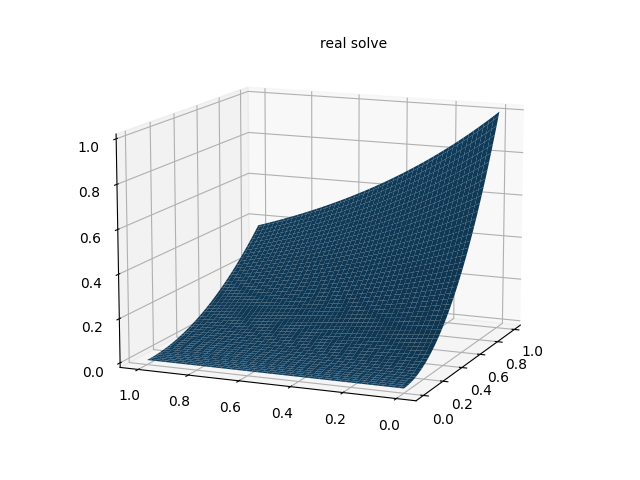
u_real = xx * xx * torch.exp(-yy)
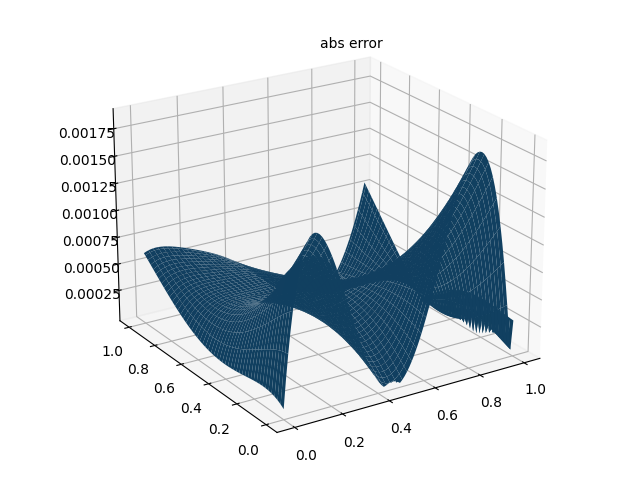
u_error = torch.abs(u_pred-u_real)
u_pred_fig = u_pred.reshape(h,h)
u_real_fig = u_real.reshape(h,h)
u_error_fig = u_error.reshape(h,h)
print("Max abs error is: ", float(torch.max(torch.abs(u_pred - xx * xx * torch.exp(-yy)))))
# 仅有PDE损失 Max abs error: 0.004852950572967529
# 带有数据点损失 Max abs error: 0.0018916130065917969# 作PINN数值解图
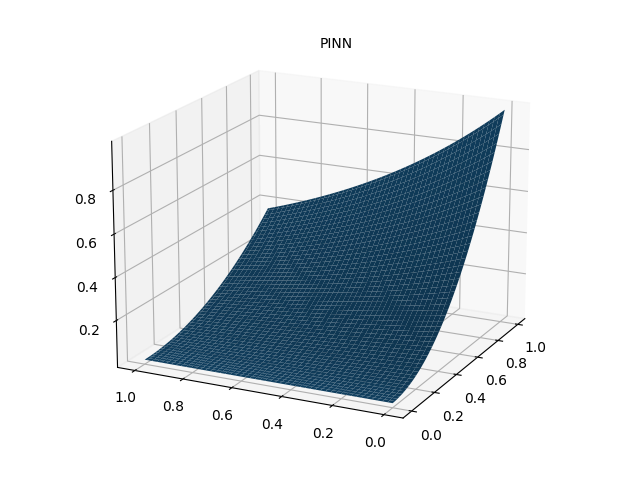
fig = plt.figure()
ax = Axes3D(fig)
ax.plot_surface(xm.detach().numpy(), ym.detach().numpy(), u_pred_fig.detach().numpy())
ax.text2D(0.5, 0.9, "PINN", transform=ax.transAxes)
plt.show()
fig.savefig("PINN solve.png")# 作真解图
fig = plt.figure()
ax = Axes3D(fig)
ax.plot_surface(xm.detach().numpy(), ym.detach().numpy(), u_real_fig.detach().numpy())
ax.text2D(0.5, 0.9, "real solve", transform=ax.transAxes)
plt.show()
fig.savefig("real solve.png")# 误差图
fig = plt.figure()
ax = Axes3D(fig)
ax.plot_surface(xm.detach().numpy(), ym.detach().numpy(), u_error_fig.detach().numpy())
ax.text2D(0.5, 0.9, "abs error", transform=ax.transAxes)
plt.show()
fig.savefig("abs error.png")
4. 数值解
参考资料
[1]. Physics-informed machine learning
[2]. 知乎-PaperWeekly
相关文章:
PINN解偏微分方程实例1
PINN解偏微分方程实例11. PINN简介2. 偏微分方程实例3. 基于pytorch实现代码4. 数值解参考资料1. PINN简介 PINN是一种利用神经网络求解偏微分方程的方法,其计算流程图如下图所示,这里以偏微分方程(1)为例。 ∂u∂tu∂u∂xv∂2u∂x2\begin{align} \frac{…...

【python 基础篇 十二】python的函数-------函数生成器
目录1.生成器基本概念2.生成器的创建方式3.生成器的输出方式4.send()方法5.关闭生成器6.注意事项1.生成器基本概念 是一个特色的迭代器(迭代器的抽象层级更高)所以拥有迭代器的特性 惰性计算数据 节省内存 ----就是不是立马生成所有数据,而是…...
elasticsearch全解 (待续)
目录elasticsearchELK技术栈Lucene与Elasticsearch关系为什么不是其他搜索技术?Elasticsearch核心概念Cluster:集群Node:节点Shard:分片Replia:副本全文检索倒排索引正向和倒排es的一些概念文档和字段索引和映射mysql与…...

springboot2集成knife4j
springboot2集成knife4j springboot2集成knife4j 环境说明集成knife4j 第一步:引入依赖第二步:编写配置类第三步:测试一下 第一小步:编写controller第二小步:启动项目,访问api文档 相关资料 环境说明 …...

Qt 性能优化:CPU占有率高的现象和解决办法
一、前言 在最近的项目中,发现执行 Qt 程序时,有些情况下的 CPU 占用率奇高,最高高达 100%。项目跑在嵌入式板子上,最开始使用 EGLFS 插件,但是由于板子没有单独的鼠标层,导致鼠标移动起来卡顿,…...
MySQL专题(学会就毕业)
MySQL专题0.准备sql设计一张员工信息表,要求如下:编号(纯数字)员工工号 (字符串类型,长度不超过10位)员工姓名(字符串类型,长度不超过10位)性别(男/女,存储一…...
Java高级技术:单元测试、反射、注解
目录 单元测试 单元测试概述 单元测试快速入门 单元测试常用注解 反射 反射概述 反射获取类对象 反射获取构造器对象 反射获取成员变量对象 反射获取方法对象 反射的作用-绕过编译阶段为集合添加数据 反射的作用-通用框架的底层原理 注解 注解概述 自定义注解 …...

C语言初识
#include <stdio.h>//这种写法是过时的写法 void main() {}//int是整型的意思 //main前面的int表示main函数调用后返回一个整型值 int main() {return 0; }int main() { //主函数--程序的入口--main函数有且仅有一个//在这里完成任务//在屏幕伤输出hello world//函数-pri…...

Cadence Allegro 导出Etch Length by Layer Report报告详解
⏪《上一篇》 🏡《上级目录》 ⏩《下一篇》 目录 1,概述2,Etch Length by Layer Report作用3,Etch Length by Layer Report示例4,Etch Length by Layer Report导出方法4.2,方法14.2,方法2B站关注“硬小二”浏览更多演示视频...
无监督对比学习(CL)最新必读经典论文整理分享
对比自监督学习技术是一种很有前途的方法,它通过学习对使两种事物相似或不同的东西进行编码来构建表示。Contrastive learning有很多文章介绍,区别于生成式的自监督方法,如AutoEncoder通过重建输入信号获取中间表示,Contrastive M…...

最长回文子串【Java实现】
题目描述 现有一个字符串s,求s的最长回文子串的长度 输入描述 一个字符串s,仅由小写字母组成,长度不超过100 输出描述 输出一个整数,表示最长回文子串的长度 样例 输入 lozjujzve输出 // 最长公共子串为zjujz,长度为…...

LeetCode 438. Find All Anagrams in a String
LeetCode 438. Find All Anagrams in a String 题目描述 Given two strings s and p, return an array of all the start indices of p’s anagrams in s. You may return the answer in any order. An Anagram is a word or phrase formed by rearranging the letters of a…...
MyBatis-1:基础概念+环境配置
什么是MyBatis?MyBatis是一款优秀的持久层框架,支持自定义sql,存储过程以及高级映射。MyBatis就是可以让我们更加简单的实现程序和数据库之间进行交互的一个工具。可以让我们更加简单的操作和读取数据库的内容。MyBatis的官网:htt…...

R语言基础(五):流程控制语句
R语言基础(一):注释、变量 R语言基础(二):常用函数 R语言基础(三):运算 R语言基础(四):数据类型 6.流程控制语句 和大多数编程语言一样,R语言支持选择结构和循环结构。 6.1 选择语句 选择语句是当条件满足的时候才执行…...

【Java开发】设计模式 02:工厂模式
1 工厂模式介绍工厂模式(Factory Pattern)是 Java 中最常用的设计模式之一。这种类型的设计模式属于创建型模式,它提供了一种创建对象的最佳方式。在工厂模式中,我们在创建对象时不会对客户端暴露创建逻辑,并且是通过使…...
合并两个链表(自定义位置合并与有序合并)LeetCode--OJ题详解
图片: csdn 自定义位置合并 问题: 给两个链表 list1 和 list2 ,它们包含的元素分别为 n 个和 m 个。 请你将 list1 中 下标从 a 到 b 的全部节点都删除,并将list2 接在被删除节点 的位置。 比如: 输入:list1 [1…...

Java编程问题总结
Java编程问题总结 整理自 https://github.com/giantray/stackoverflow-java-top-qa 基础语法 将InputStream转换为String apache commons-io String content IOUtils.toString(new FileInputStream(file), StandardCharsets.UTF_8); //String value FileUtils.readFileT…...

binutils工具集——objcopy的用法
以下内容源于网络资源的学习与整理,如有侵权请告知删除。 一、工具简介 objcopy主要用来转换目标文件的格式。 在实际开发中,我们会用该工具进行格式转换与内容删除。 (1)在链接完成后,将elf格式的.out文件转化为bi…...
Windows使用Stable Diffusion时遇到的各种问题和知识点整理(更新中...)
Stable Diffusion安装完成后,在使用过程中会出现卡死、文件不存在等问题,在本文中将把遇到的问题陆续记录下来,有兴趣的朋友可以参考。 如果要了解如何安装sd,则参考本文《Windows安装Stable Diffusion WebUI及问题解决记录》。如…...
MySQL workbench基本查询语句
1.查询所有字段所有记录 SELECT * FROM world.city; select 表示查询;“*” 称为通配符,也称为“标配符”。表示将表中所有的字段都查询出来;from 表示从哪里查询;world.city 表示名为world的数据库中的city表; 上面…...

全栈开发的核心技能:掌握这4个技术,成为全栈工程师
对于很多深耕测试领域多年的软件测试从业者来说,“转全栈开发”早已不是一个陌生的方向——无论是为了突破职业瓶颈,还是为了打通测试到开发的链路,提升自己的端到端交付能力,抑或是拓展职业选择的边界,全栈工程师都是…...

oracle数据库的了解和使用
文章目录 1. 概述1)数据库2)实例3)表空间4)用户5) schema6)数据库的持久化7)注释8)mysql和oracle数据库逻辑结构类比 2. 数据库操作1)创建表空间2)创建操作表空间的用户3…...

Java学习笔记——DAY3
目录 1、Java方法 2、方法的定义 3、方法调用 4、方法的重载 5、命令行传参 6、可变参数 7、递归 1、Java方法 Java方法是语句的集合,它们在一块执行一个功能。 方法是解决一类问题的步骤的有序集合方法包含与类或对象中方法在程序中被创建,在其…...

为什么你的Veo 4K输出只有2K质量?深度拆解Veo 2.3引擎中的3层分辨率欺骗机制与绕过方案
更多请点击: https://codechina.net 第一章:Veo 4K输出质量失真的现象确认与基准测试 近期多位专业视频工程师反馈,Veo系列编码器在启用4K60fps高码率输出时,出现肉眼可辨的色度抽样偏移、边缘锐度衰减及动态场景下的块效应增强。…...

Navicat Premium试用期重置终极指南:三步恢复完整14天试用
Navicat Premium试用期重置终极指南:三步恢复完整14天试用 【免费下载链接】navicat-premium-reset-trial Reset macOS Navicat Premium 15/16/17 app remaining trial days 项目地址: https://gitcode.com/gh_mirrors/na/navicat-premium-reset-trial 你是否…...

终极显卡风扇控制指南:用FanControl彻底解决NVIDIA风扇异常
终极显卡风扇控制指南:用FanControl彻底解决NVIDIA风扇异常 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trendi…...

创业团队如何利用Taotoken的Token Plan有效控制AI应用开发成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 创业团队如何利用Taotoken的Token Plan有效控制AI应用开发成本 对于资源有限的创业团队和独立开发者而言,在项目初期将…...

移动端部署福音?YOLOv5结合EfficientNetV2主干网络的轻量化改造与性能实测
YOLOv5与EfficientNetV2融合:移动端目标检测的轻量化实践 在移动端和边缘计算设备上部署目标检测模型始终面临计算资源有限、功耗敏感等挑战。本文将深入探讨如何通过将YOLOv5与EfficientNetV2主干网络结合,构建一个真正适合嵌入式设备的轻量化目标检测…...

别再用土办法改论文了!书匠策AI官网www.shujiangce.com才是2025届毕业生的“通关密码“
你有没有经历过这种崩溃瞬间? 凌晨两点,你对着电脑屏幕,查重率39%,AIGC疑似率67%。导师发来一条消息:"这篇不像你写的,重写。" 那一刻,你是不是特别想问一句:我到底该怎…...

cann/asc-devkit向量比较API文档
asc_le_scalar 【免费下载链接】asc-devkit 本项目是CANN 推出的昇腾AI处理器专用的算子程序开发语言,原生支持C和C标准规范,主要由类库和语言扩展层构成,提供多层级API,满足多维场景算子开发诉求。 项目地址: https://gitcode.…...