基于深度学习LightWeight的人体姿态检测跌倒系统源码
一. LightWeight概述
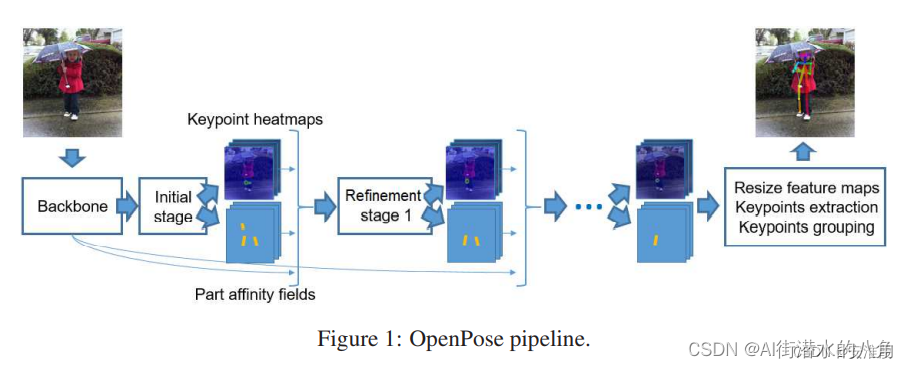
light weight openpose是openpose的简化版本,使用了openpose的大体流程。
Light weight openpose和openpose的区别是:
a 前者使用的是Mobilenet V1(到conv5_5),后者使用的是Vgg19(前10层)。
b 前者部分层使用了空洞卷积(dilated convolution)来提升感受视野,后者使用一般的卷积。
c 前者卷积核大小为3*3,后者为7*7。
d 前者只有一个refine stage,后者有5个stage。
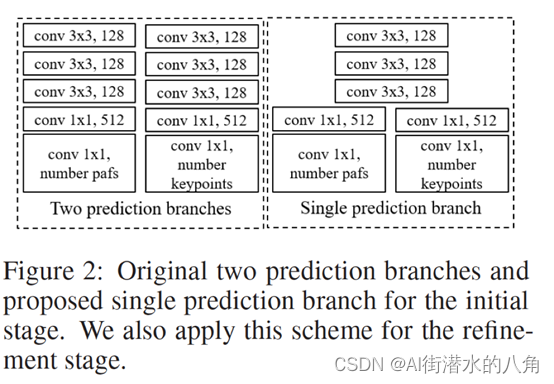
e 前者的initial stage和refine stage里面的两个分支(hotmaps和pafs)使用权值共享,后者则是并行的两个分支
二. LightWeight的网络结构
openpose的每个stage使用下图中左侧的两个并行的分支,分别预测hotmaps和pafs,为了进一步降低计算量,light weight openpose中将前几层进行权值共享,如下图右侧所示。
其网络流程:
三. LightWeight的网络结构代码
import torch
from torch import nnfrom modules.conv import conv, conv_dw, conv_dw_no_bnclass Cpm(nn.Module):def __init__(self, in_channels, out_channels):super().__init__()self.align = conv(in_channels, out_channels, kernel_size=1, padding=0, bn=False)self.trunk = nn.Sequential(conv_dw_no_bn(out_channels, out_channels),conv_dw_no_bn(out_channels, out_channels),conv_dw_no_bn(out_channels, out_channels))self.conv = conv(out_channels, out_channels, bn=False)def forward(self, x):x = self.align(x)x = self.conv(x + self.trunk(x))return xclass InitialStage(nn.Module):def __init__(self, num_channels, num_heatmaps, num_pafs):super().__init__()self.trunk = nn.Sequential(conv(num_channels, num_channels, bn=False),conv(num_channels, num_channels, bn=False),conv(num_channels, num_channels, bn=False))self.heatmaps = nn.Sequential(conv(num_channels, 512, kernel_size=1, padding=0, bn=False),conv(512, num_heatmaps, kernel_size=1, padding=0, bn=False, relu=False))self.pafs = nn.Sequential(conv(num_channels, 512, kernel_size=1, padding=0, bn=False),conv(512, num_pafs, kernel_size=1, padding=0, bn=False, relu=False))def forward(self, x):trunk_features = self.trunk(x)heatmaps = self.heatmaps(trunk_features)pafs = self.pafs(trunk_features)return [heatmaps, pafs]class RefinementStageBlock(nn.Module):def __init__(self, in_channels, out_channels):super().__init__()self.initial = conv(in_channels, out_channels, kernel_size=1, padding=0, bn=False)self.trunk = nn.Sequential(conv(out_channels, out_channels),conv(out_channels, out_channels, dilation=2, padding=2))def forward(self, x):initial_features = self.initial(x)trunk_features = self.trunk(initial_features)return initial_features + trunk_featuresclass RefinementStage(nn.Module):def __init__(self, in_channels, out_channels, num_heatmaps, num_pafs):super().__init__()self.trunk = nn.Sequential(RefinementStageBlock(in_channels, out_channels),RefinementStageBlock(out_channels, out_channels),RefinementStageBlock(out_channels, out_channels),RefinementStageBlock(out_channels, out_channels),RefinementStageBlock(out_channels, out_channels))self.heatmaps = nn.Sequential(conv(out_channels, out_channels, kernel_size=1, padding=0, bn=False),conv(out_channels, num_heatmaps, kernel_size=1, padding=0, bn=False, relu=False))self.pafs = nn.Sequential(conv(out_channels, out_channels, kernel_size=1, padding=0, bn=False),conv(out_channels, num_pafs, kernel_size=1, padding=0, bn=False, relu=False))def forward(self, x):trunk_features = self.trunk(x)heatmaps = self.heatmaps(trunk_features)pafs = self.pafs(trunk_features)return [heatmaps, pafs]class PoseEstimationWithMobileNet(nn.Module):def __init__(self, num_refinement_stages=1, num_channels=128, num_heatmaps=19, num_pafs=38):super().__init__()self.model = nn.Sequential(conv( 3, 32, stride=2, bias=False),conv_dw( 32, 64),conv_dw( 64, 128, stride=2),conv_dw(128, 128),conv_dw(128, 256, stride=2),conv_dw(256, 256),conv_dw(256, 512), # conv4_2conv_dw(512, 512, dilation=2, padding=2),conv_dw(512, 512),conv_dw(512, 512),conv_dw(512, 512),conv_dw(512, 512) # conv5_5)self.cpm = Cpm(512, num_channels)self.initial_stage = InitialStage(num_channels, num_heatmaps, num_pafs)self.refinement_stages = nn.ModuleList()for idx in range(num_refinement_stages):self.refinement_stages.append(RefinementStage(num_channels + num_heatmaps + num_pafs, num_channels,num_heatmaps, num_pafs))def forward(self, x):backbone_features = self.model(x)backbone_features = self.cpm(backbone_features)stages_output = self.initial_stage(backbone_features)for refinement_stage in self.refinement_stages:stages_output.extend(refinement_stage(torch.cat([backbone_features, stages_output[-2], stages_output[-1]], dim=1)))return stages_output
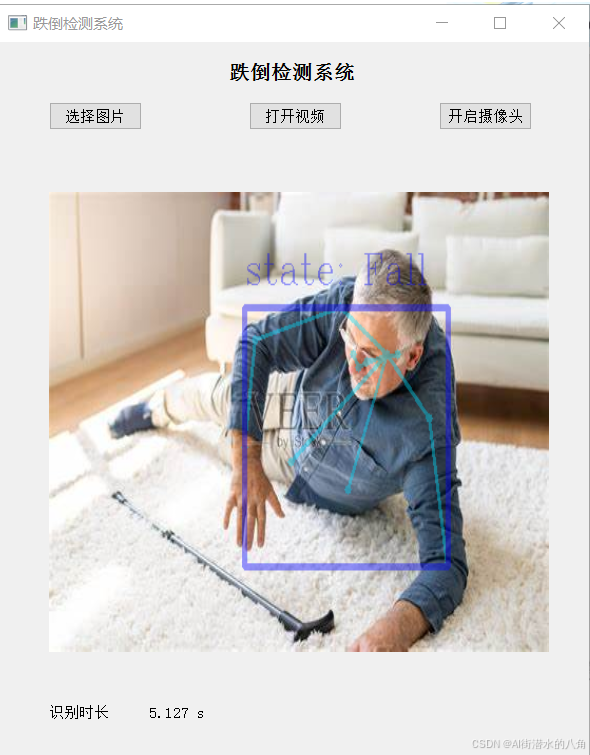
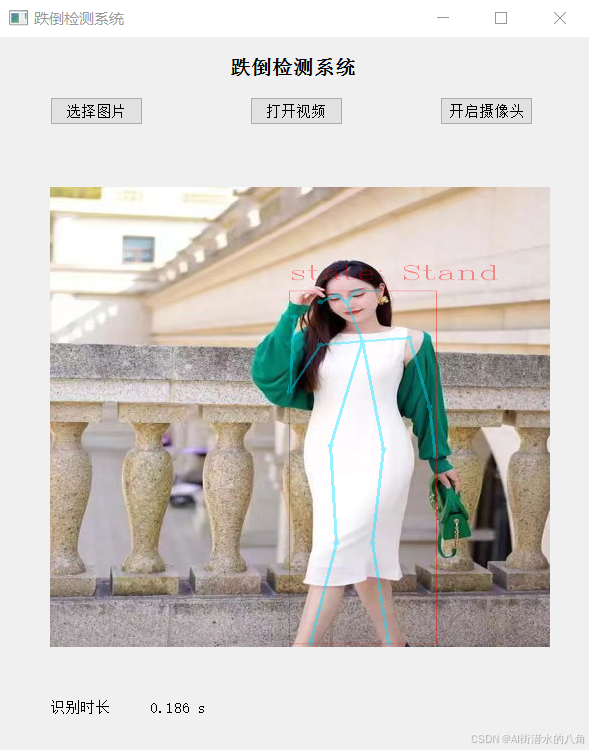
四. LightWeight是怎么去识别跌倒呢
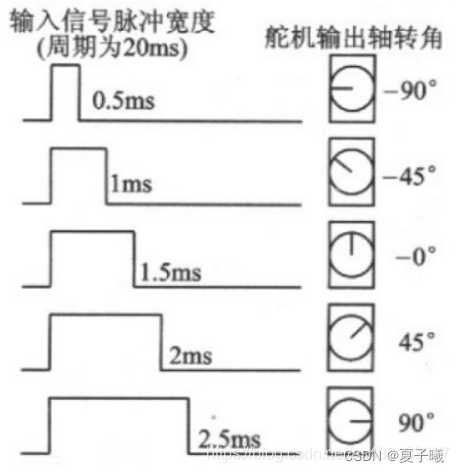
LightWeight可以检测到人体的关键点,所以可以通过两种方式来判断是否跌倒,第一种方法是通过计算角度,第二种方式,是通过判断整体的关键点(把抠出的关键点图送入到分类网络),本文的做法是第二种方式
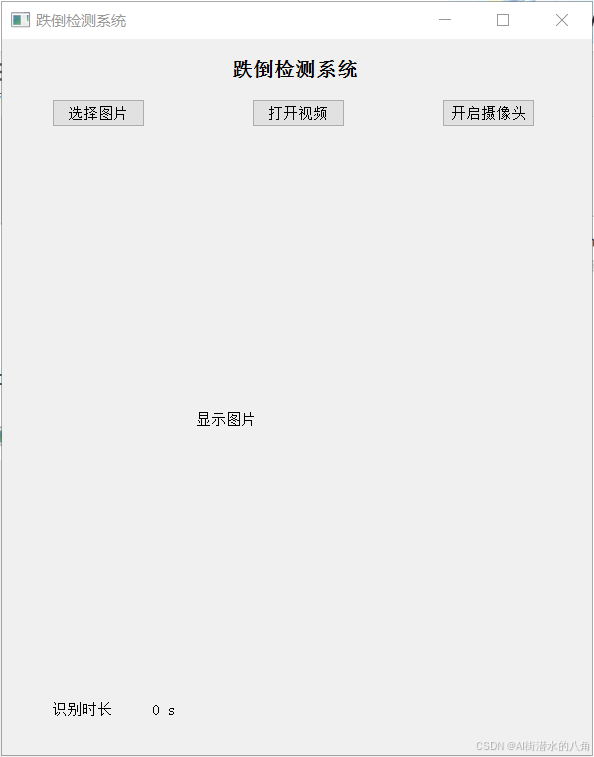
五. LightWeight的演示效果(具有图片和摄像头识别功能)
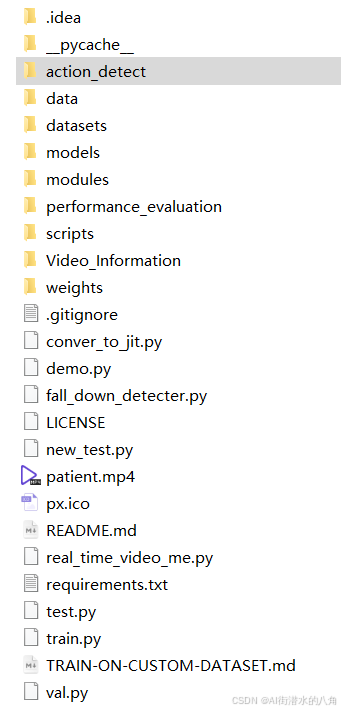
六. 整个工程的内容
提供源代码,模型,提供GUI界面代码
代码的下载路径(新窗口打开链接):基于深度学习LightWeight的人体姿态检测跌倒系统源码

有问题可以私信或者留言,有问必答
相关文章:
基于深度学习LightWeight的人体姿态检测跌倒系统源码
一. LightWeight概述 light weight openpose是openpose的简化版本,使用了openpose的大体流程。 Light weight openpose和openpose的区别是: a 前者使用的是Mobilenet V1(到conv5_5),后者使用的是Vgg19(前10…...
SpringBoot 生产实践:没有父 starter 的打包问题
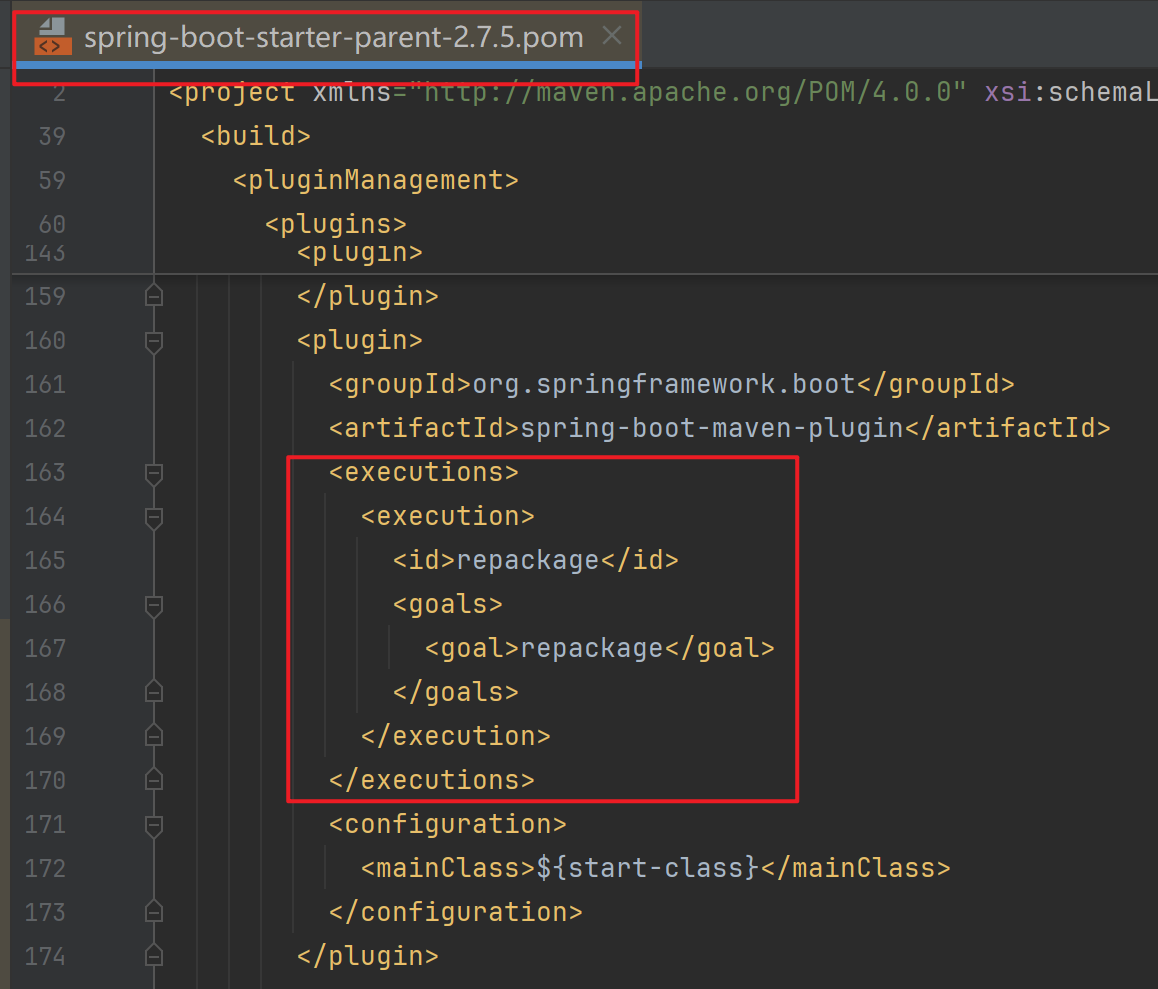
文章目录 前言一、搜索引擎二、Chat GPT三、官方文档四、小结推荐阅读 前言 今天刚准备写点文章,需要 SpringBoot 项目来演示效果。一时心血来潮,没有采用传统的方式(即通过引入 spring-boot-starter-parent 父工程的方式)。 &l…...

IDEA配Git
目录 前言 1.创建Git仓库,获得可提交渠道 2.选择本地提交的项目名 3.配置远程仓库的地址 4.新增远程仓库地址 5.开始进行commit操作 6.push由于邮箱问题被拒绝的解决方法: 后记 前言 以下操作都是基于你已经下载了Git的前提下进行的,…...
51单片机STC89C52RC——14.1 直流电机调速
目录 目的/效果 1:电机转速同步LED呼吸灯 2 通过独立按键 控制直流电机转速。 一,STC单片机模块 二,直流电机 2.1 简介 2.2 驱动电路 2.2.1 大功率器件直接驱动 2.2.2 H桥驱动 正转 反转 2.2.3 ULN2003D 引脚、电路 2.3 PWM&…...

AI对于高考和IT行业的深远影响
目录 AI对IT行业的冲击及深远影响1. 工作自动化2. 新的就业机会3. 行业融合4. 技术升级和创新5. 数据的重要性 IT行业的冬天要持续多久?大学的软件开发类专业是否还值得报考?其他问题IT行业是否都是加班严重?35岁后就业困难是否普遍现象&…...

C语言下的文件详解
主要内容 文件概述文件指针文件的打开与关闭文件的读写 文件 把输入和输出的数据以文件的形式保存在计算机的外存储器上,可以确保数据能随时使用,避免反复输入和读取数据 文件概述 文件是指一组相关数据的有序集合 文件是存储数据的基本单位&#…...

Oracle PL / SQL块结构
在PL / SQL中,最小的有意义的代码分组被称为块。 块代码为变量声明和异常处理提供执行和作用域边界。 PL / SQL允许您创建匿名块和命名块。 命名块可以是包,过程,函数,触发器或对象类型。 PL / SQL是SQL的过程语言扩展&#x…...

MySQL的安装和启动
安装 版本 1,社区版:免费,不提供任何技术支持 2,商业版:可以试用30天,官方提供技术支持下载 1,下载地址:https://dev.mysql.com/downloads/mysql/ 2,安装:傻…...

Prometheus概述
1.什么是prometheus Prometheus 是一个开源的服务监控系统和时序数据库,其提供了通用的数据模型和快捷数据采集、存储和查询接口。它的核心组件Prometheus server会定期从静态配置的监控目标或者基于服务发现自动配置的自标中进行拉取数据,当新拉取到的…...

【SQL】什么是最左前缀原则/最左匹配原则
最左前缀原则(或最左匹配原则)是关系型数据库在使用复合索引时遵循的一条重要规则。该原则指的是,当查询条件使用复合索引时,查询优化器会首先使用索引的最左边的列,依次向右匹配,直到不再满足查询条件为止…...

java项目配置logback日志
在resource目录下添加logback配置文件 <?xml version"1.0" encoding"UTF-8"?> <configuration scan"true" scanPeriod"60 seconds" debug"false"><property name"log_dir" value"/APL/log…...

Python入门 2024/7/6
目录 元组的定义和操作 字符串的定义和操作 字符串 字符串的替换 字符串的分割 字符串的规整操作(去除前后空格) 字符串的规整操作(去掉前后指定字符串) 操作 字符串的替换 字符串的分割 字符串的规整操作 统计字符串的…...

ChatGPT4深度解析:探索智能对话新境界
大模型chatgpt4分析功能初探 目录 1、探测目的 2、目标变量分析 3、特征缺失率处理 4、特征描述性分析 5、异常值分析 6、相关性分析 7、高阶特征挖掘 1、探测目的 1、分析chat4的数据分析能力,提高部门人效 2、给数据挖掘提供思路 3、原始数据…...

触底加载的两种思路(以vue3前端和nodejs后端为例)
一:首先,nodejs后端的代码都是一样的. 需要前端返回page参数,然后nodejs逻辑进行处理,截取页数和每页条数和总条数, 总条数用来作为判断是否有数据的条件,也可以不用,注意看下文 一:不用获取容器高度的. pinia中进行的axios请求处理 在vue文件中进行pinia中数据的导入,继续进…...

tobias实现支付宝支付
tobias是一个为支付宝支付SDK做的Flutter插件。 如何使用 你需要在pubspec.yaml中配置url_scheme。url_scheme是一个独特的字符串,用来重新启动你的app,但是请注意字符串“_”是不合法的。 在iOS端,你还需要配置并传入一个universal link。…...

【音视频 | RTSP】RTSP协议详解 及 抓包例子解析(详细而不赘述)
😁博客主页😁:🚀https://blog.csdn.net/wkd_007🚀 🤑博客内容🤑:🍭嵌入式开发、Linux、C语言、C、数据结构、音视频🍭 🤣本文内容🤣&a…...
SQL Server 2022 中的 Tempdb 性能改进非常显著
无论是在我的会话中还是在我写的博客中,Tempdb 始终是我的话题。然而,当谈到 SQL Server 2022 中引入的重大性能变化时,我从未如此兴奋过。他们解决了我们最大的性能瓶颈之一,即系统页面闩锁并发。 在 SQL Server 2019 中&#x…...

C++ Lambda表达式第二篇, Lambda表达式
C Lambda表达式 Lambda 捕获含有模板参数的Lambda表达式无模板参数的Lambda表达式 Lambda 捕获 captures是零个或多个捕获的逗号分隔列表,可以选择以capture-default开头。捕获列表定义可从 lambda 函数体内访问的外部变量。唯一的捕获默认值是 &,…...

Linux系统的介绍和常用命令
文章目录 介绍常用命令文件和目录操作文件内容操作系统管理命令网络命令 🎈个人主页:程序员 小侯 🎐CSDN新晋作者 🎉欢迎 👍点赞✍评论⭐收藏 ✨收录专栏:Liunx系统 ✨文章内容:Liunx系统介绍 &…...

IDEA安装IDE Eval Reset插件,30天自动续期,无限激活
第一步: 下载idea 注意:版本要是2021.2.2以下 第二步:快捷键CtrlAlts打开设置 第三步:打开下图中蓝色按钮 第四步:点击弹窗的 “” ,并输入 plugins.zhile.io 点击 “ok” 第五步:搜索IDE Ea…...

51c自动驾驶~合集58
我自己的原文哦~ https://blog.51cto.com/whaosoft/13967107 #CCA-Attention 全局池化局部保留,CCA-Attention为LLM长文本建模带来突破性进展 琶洲实验室、华南理工大学联合推出关键上下文感知注意力机制(CCA-Attention),…...
python/java环境配置
环境变量放一起 python: 1.首先下载Python Python下载地址:Download Python | Python.org downloads ---windows -- 64 2.安装Python 下面两个,然后自定义,全选 可以把前4个选上 3.环境配置 1)搜高级系统设置 2…...
CMake基础:构建流程详解
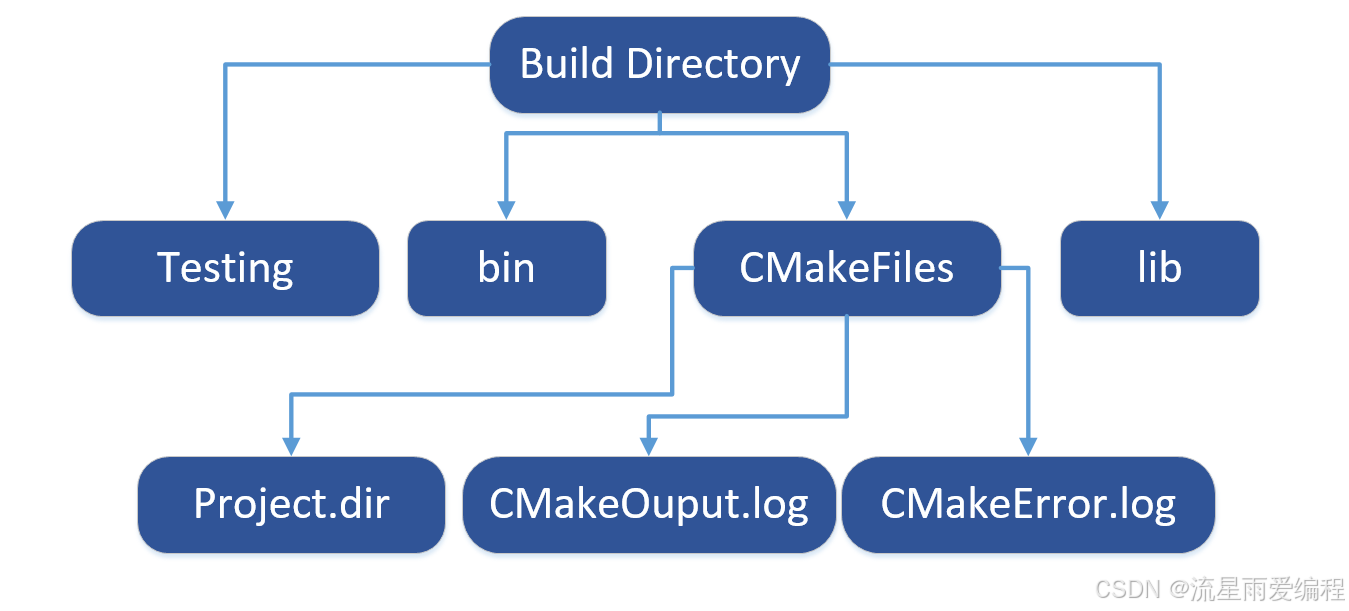
目录 1.CMake构建过程的基本流程 2.CMake构建的具体步骤 2.1.创建构建目录 2.2.使用 CMake 生成构建文件 2.3.编译和构建 2.4.清理构建文件 2.5.重新配置和构建 3.跨平台构建示例 4.工具链与交叉编译 5.CMake构建后的项目结构解析 5.1.CMake构建后的目录结构 5.2.构…...
理解 MCP 工作流:使用 Ollama 和 LangChain 构建本地 MCP 客户端
🌟 什么是 MCP? 模型控制协议 (MCP) 是一种创新的协议,旨在无缝连接 AI 模型与应用程序。 MCP 是一个开源协议,它标准化了我们的 LLM 应用程序连接所需工具和数据源并与之协作的方式。 可以把它想象成你的 AI 模型 和想要使用它…...
DAY 47
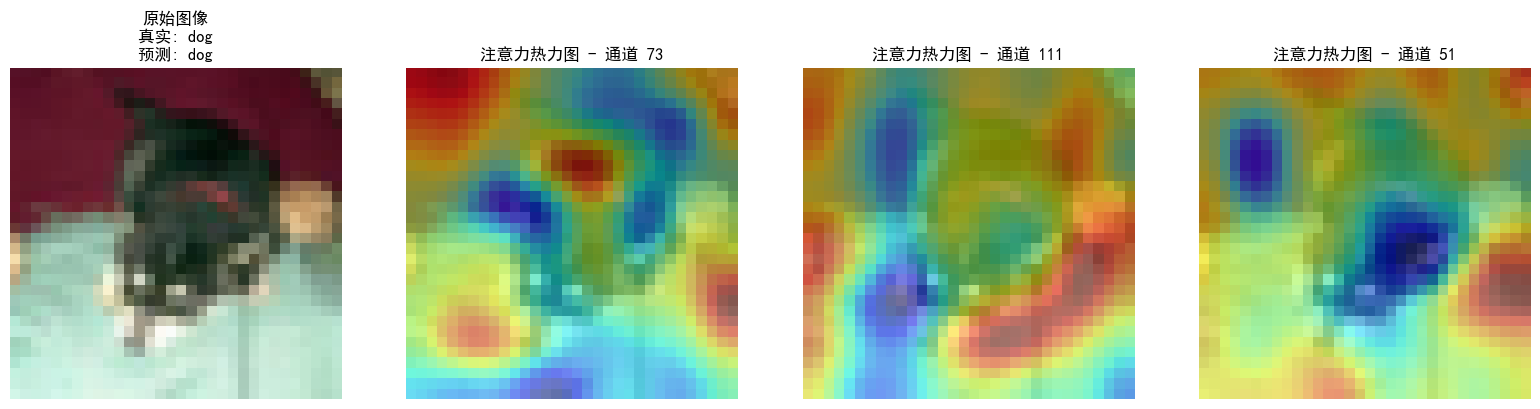
三、通道注意力 3.1 通道注意力的定义 # 新增:通道注意力模块(SE模块) class ChannelAttention(nn.Module):"""通道注意力模块(Squeeze-and-Excitation)"""def __init__(self, in_channels, reduction_rat…...
从深圳崛起的“机器之眼”:赴港乐动机器人的万亿赛道赶考路
进入2025年以来,尽管围绕人形机器人、具身智能等机器人赛道的质疑声不断,但全球市场热度依然高涨,入局者持续增加。 以国内市场为例,天眼查专业版数据显示,截至5月底,我国现存在业、存续状态的机器人相关企…...

django filter 统计数量 按属性去重
在Django中,如果你想要根据某个属性对查询集进行去重并统计数量,你可以使用values()方法配合annotate()方法来实现。这里有两种常见的方法来完成这个需求: 方法1:使用annotate()和Count 假设你有一个模型Item,并且你想…...

测试markdown--肇兴
day1: 1、去程:7:04 --11:32高铁 高铁右转上售票大厅2楼,穿过候车厅下一楼,上大巴车 ¥10/人 **2、到达:**12点多到达寨子,买门票,美团/抖音:¥78人 3、中饭&a…...
JUC笔记(上)-复习 涉及死锁 volatile synchronized CAS 原子操作
一、上下文切换 即使单核CPU也可以进行多线程执行代码,CPU会给每个线程分配CPU时间片来实现这个机制。时间片非常短,所以CPU会不断地切换线程执行,从而让我们感觉多个线程是同时执行的。时间片一般是十几毫秒(ms)。通过时间片分配算法执行。…...

UR 协作机器人「三剑客」:精密轻量担当(UR7e)、全能协作主力(UR12e)、重型任务专家(UR15)
UR协作机器人正以其卓越性能在现代制造业自动化中扮演重要角色。UR7e、UR12e和UR15通过创新技术和精准设计满足了不同行业的多样化需求。其中,UR15以其速度、精度及人工智能准备能力成为自动化领域的重要突破。UR7e和UR12e则在负载规格和市场定位上不断优化…...