传感器标定(一)摄像头内参标定
一、使用ROS进行手动标定安装
1、安装 image-view &usb_cam ⽤于驱动相机
sudo apt-get install ros-melodic-image-view
sudo apt-get install ros-melodic-usb-cam
2、查看系统视频设备
v4l2-
ctl -d /dev/video0 --all 查询所有相机具体的参数包括width和height
ls /dev/video*
ls /dev/camera*
v4l2-ctl -d /dev/video0 --all
3、修改配置文件
roscd usb_cam
cd launch
sudo gedit usb_cam-test.launch
<launch>
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >
<!-- modify the video device to your device -->
<param name="video_device" value="/dev/video0" />
<!-- modify the size of your device -->
<param name="image_width" value="1920" />
<param name="image_height" value="1080" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
</node>
<node name="image_view" pkg="image_view" type="image_view" respawn="false"
output="screen">
<remap from="image" to="/usb_cam/image_raw"/>
<param name="autosize" value="true" />
</node>
</launch>
4、开启相机
启动有warning例如提⽰校准配置⽂件 head_camera.yaml not found ,这个是正常的,我们标定
完后才会⽣成这个配置⽂件。
roslaunch usb_cam usb_cam-test.launch
5、根据棋盘格修改参数
- ⼀个是size参数为棋盘格⻆点数量⽐如 8x9=72 个格⼦的棋盘格,⻆点个数为 7x8=63 个,size
参数就要写 7x8 ; - 另外⼀个参数为square,传⼊的参数为棋盘格⼀个小格⼦的宽度(注意单位为m);
- image:=/usb_cam/image_raw 标定当前订阅图像来源⾃名为 /usb_cam/image_raw 的
topic; - camera:=/usb_cam 为摄像机名。
rosrun camera_calibration cameracalibrator.py --size 7x6 --square 0.05 image:=/usb_cam/image_raw camera:=/usb_cam
6、图像采集
相机数据采集的过程需要分为两组互相配合,⼀组使⽤ROS程序进⾏采集;另⼀组⼿持棋盘格,在图像
视野范围内进⾏操作和移动。⽰例使⽤的标定板为 7×6 个 50mm×50mm ⼤小的标准棋盘格进⾏。注意,这
⾥的7×6指的是有横向7个⻆点(而⾮格⼦)与纵向6个⻆点。

-
⼿持棋盘格要求:
每次采集尽量保持稳定,最终成像光线适中,图像清晰;
⼿持棋盘格时不能对棋盘格进⾏遮挡,不能离开相机视野范围内;
采集图像类型需要丰富多样,包含:近距离图像、中距离图像、远距离图像、左右倾斜图像、
上下倾斜图像、轻微旋转图像、较⼤旋转图像、相机靠近左视野边缘图像、相机靠近右视野边
缘图像等;采集有效图像的数量在50张左右。 -
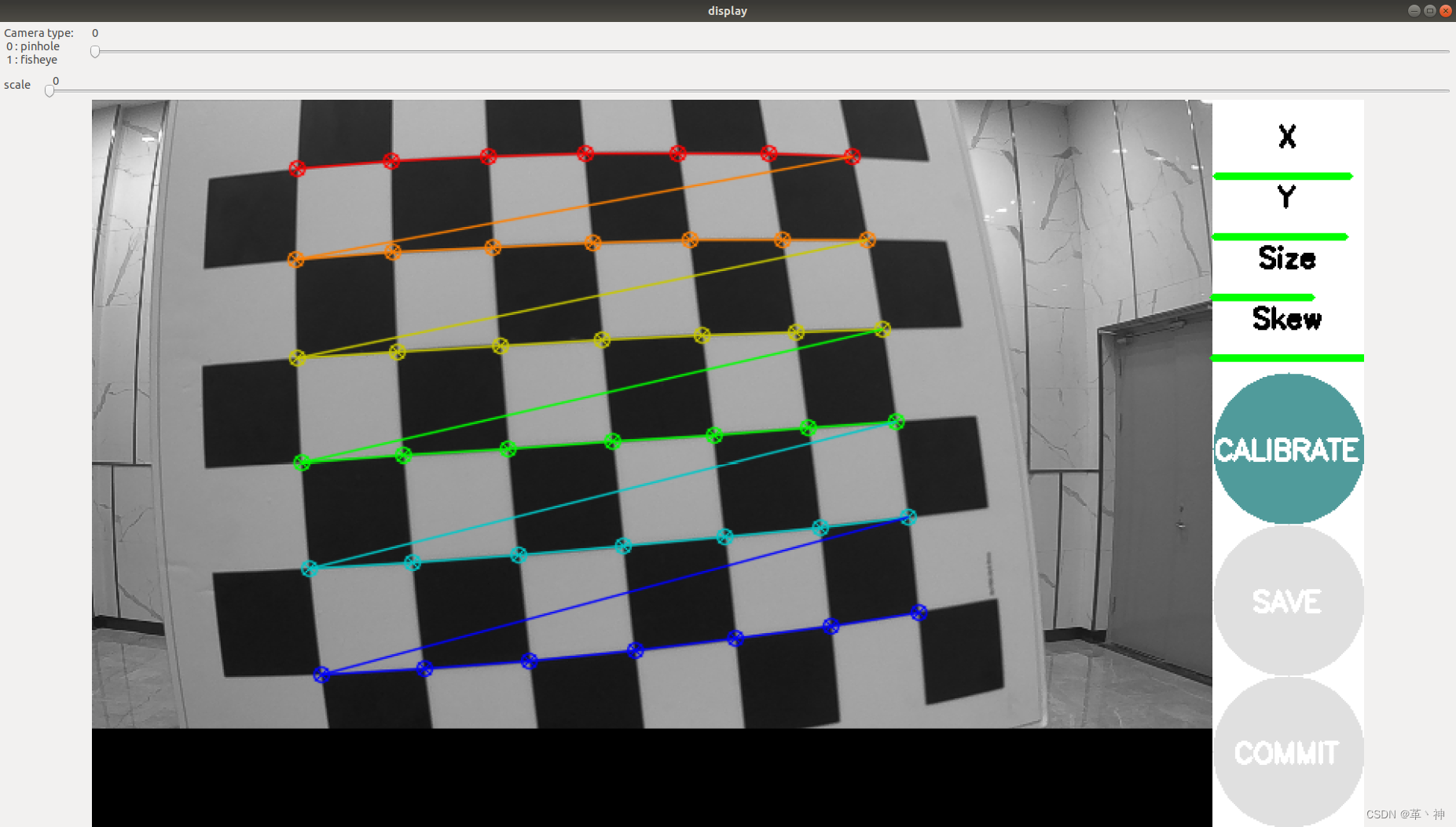
界⾯中的 X , Y , size , skew 的含义:
X :表⽰标定板在视野中的左右位置。
Y :表⽰标定板在视野中的上下位置。
size :标定板在占视野的尺⼨⼤小,也可以理解为标定板离摄像头的远近。
skew :标定板在视野中的倾斜位置 -
标定实操技巧:
在相机视野范围内且能识别棋盘格的前提下,左右、上下和前后移动范围尽可能⼤⼀些,将有助于更快
地满⾜ X , Y , Size 的要求;边移动边扭转标定板,可以更快完成 Skew 。当 X 、 Y 、 Size 、 Skew 四个
都变成绿⾊,然后就可以看到 CALIBRATE 这个按钮变成⻘⾊,表明已经采到⾜够多的图⽚数据可供标定
了。
7、开始标定
点击 CALCULATE 进⾏标定会稍微有点卡顿,不要担⼼后台正在进⾏标定,标定完成后观察当前的相机界
⾯,
如果相机成像完全正常了,则说明标定成功了,在终端界⾯会有对应的参数 D K R P :
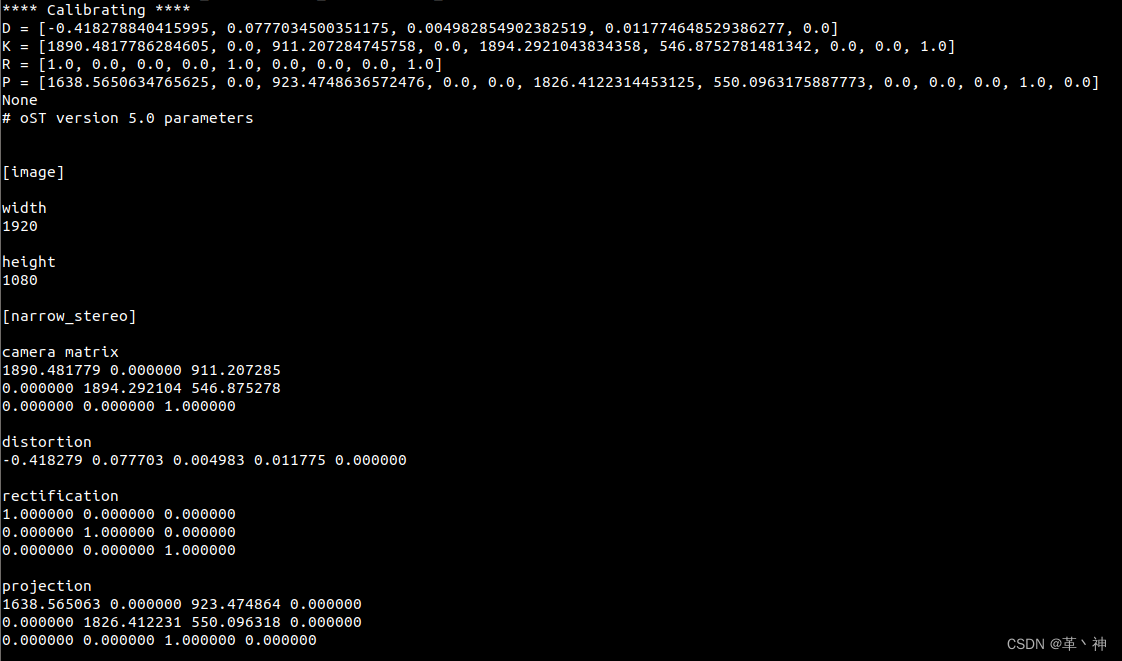
另外,点击标定界⾯右下⾯的 SAVE 和 COMMIT 按钮,可保存标定完成后的⽂件到路径
/tmp/calibrationdata.tar.gz 。
相关文章:
传感器标定(一)摄像头内参标定
一、使用ROS进行手动标定安装 1、安装 image-view &usb_cam ⽤于驱动相机 sudo apt-get install ros-melodic-image-view sudo apt-get install ros-melodic-usb-cam2、查看系统视频设备 v4l2- ctl -d /dev/video0 --all 查询所有相机具体的参数包括width和height ls /…...

基于门控循环单元 GRU 实现股票单变量时间序列预测(PyTorch版)
前言 系列专栏:【深度学习:算法项目实战】✨︎ 涉及医疗健康、财经金融、商业零售、食品饮料、运动健身、交通运输、环境科学、社交媒体以及文本和图像处理等诸多领域,讨论了各种复杂的深度神经网络思想,如卷积神经网络、循环神经网络、生成对…...

Apache tika 实现各种文档内容解析
Apache tika 实现各种文档内容解析 1、依赖 <?xml version"1.0" encoding"UTF-8"?> <project xmlns"http://maven.apache.org/POM/4.0.0"xmlns:xsi"http://www.w3.org/2001/XMLSchema-instance"xsi:schemaLocation"…...

Vue3 监听属性
Vue3 监听属性 Vue.js 是一个流行的前端框架,以其响应式系统和组件化开发而闻名。在 Vue3 中,监听属性(Watchers)是一个核心功能,允许开发者监控和响应数据的变化。本文将详细介绍 Vue3 中监听属性的使用方法、场景和最佳实践。 监听属性的基本概念 在 Vue3 中,监听属…...
Transformer模型论文解读、源码分析和项目实践
本文是ChatGPT系列的开篇之作,为什么吧Transformer放到这里呢,因为不管是chatgpt-1, chatgpt-2, chatgpt-3都是以Transformer作为底层基础来实现,相当于chatgpt系列的老祖先了。如果想要深入的了解清楚chatgpt的来龙去…...

前端部署自动上传资源文件到cdn/oss 解决路由和访问慢的问题
参考文档:webpack-aliyun-oss-plugin - npm 安装依赖,这是一个预编译环境下的包 npm install webpack-aliyun-oss-plugin --save-dev 以下代码的意思是: webpack中引入一个oss上传插件,并且给予其初始参数,插件根据p…...

Diffusion 公式推导 2
Diffusion 公式推导 中对 DDPM 进行了推导,本文接着对 DDIM 进行推导。 目录 六. 模型改进 六. 模型改进 从扩散模型的推理过程不难看出,DDPM 有一个致命缺点 —— 推理速度过慢,因为逆扩散是从 x T x_{T} xT 到 x 0 x_{0} x0 的完整过…...

layui-表单(输入框)
1.基本使用方法 先写一个表单元素块 form 加上layui-form 里面写行区块结构,如下: 2.输入框样式选项 input框 placeholder默认文本 autocomplete自动填充 lay-verify required必填 3.下拉菜单样式选项 默认选择第一项 select框 disable禁…...

中职网络安全B模块渗透测试server2380
使用nmap扫描添加参数-sV Flag:2.4.38 添加参数-A不然扫不全 (这两题可以直接加-sV -A) Flag: 4.3.11-Ubuntu 根据nmap扫描发现系统为ubuntu系统,ubuntu操作系统在某些版本中默认包含一个名为"ubuntu"的用户帐户。这是为了方…...

微信小程序毕业设计-教育培训系统项目开发实战(附源码+论文)
大家好!我是程序猿老A,感谢您阅读本文,欢迎一键三连哦。 💞当前专栏:微信小程序毕业设计 精彩专栏推荐👇🏻👇🏻👇🏻 🎀 Python毕业设计…...

【面试题】正向代理和反向代理的区别?
正向代理(Forward Proxy)和反向代理(Reverse Proxy)是两种常见的代理服务器类型,它们在网络通信中扮演着不同的角色,具有不同的功能和应用场景。 一、正向代理 1. 定义与位置 正向代理是位于客户端和目标…...

Python面试宝典第8题:二叉树遍历
题目 给定一棵二叉树的根节点 root ,返回它节点值的前序遍历。 示例 1: 输入:root [1,null,2,3] 输出:[1,2,3] 示例 2: 输入:root [] 输出:[] 示例 3: 输入:root […...

FastReport 指定sql 和修改 数据库连接地址的 工具类 :FastReportHelper
FastReport 指定sql 和修改 数据库连接地址的 工具类 :FastReportHelper 介绍核心代码:完整代码: 介绍 在FastReport中,经常会遇到需要给 sql 加条件的情况,或者给数据库地址做更换。 (废话不多说&#x…...

C++11中重要的新特性 Part one
序言 C11 是 C 编程语言的一个重要版本,于 2011 年由国际标准化组织 (ISO) 和国际电工委员会 (IEC) 旗下的 C 标准委员会 (ISO/IEC JTC1/SC22/WG21) 正式公布,并于同年 9 月出版。其正式名称为 ISO/IEC 14882:2011 - Information technology – Programm…...

VB 关键字
VB 关键字 Visual Basic(VB)是一种由微软开发的高级编程语言,广泛用于开发Windows桌面应用程序。在VB编程中,关键字是语言预定义的单词,具有特定的含义和用途。这些关键字不能被用作变量名或函数名,因为它们已经被编程语言赋予了特定的功能。 本文将详细介绍VB中的关键…...

Linux——多线程(四)
前言 这是之前基于阻塞队列的生产消费模型中Enqueue的代码 void Enqueue(const T &in) // 生产者用的接口{pthread_mutex_lock(&_mutex);while(IsFull())//判断队列是否已经满了{pthread_cond_wait(&_product_cond, &_mutex); //满的时候就在此情况下等待// 1.…...

InetAddress.getLocalHost().getHostAddress()阻塞导致整个微服务崩溃
InetAddress.getLocalHost().getHostAddress()阻塞导致整个微服务崩溃 import java.net.InetAddress;public class GetHostIp {public static void main(String[] args) {try {long start System.currentTimeMillis();String ipAddress InetAddress.getLocalHost().getHostA…...

在 Qt6 中,QList 和 QVector 统一 成qlist了吗?
是的,在 Qt6 中,QList 和 QVector 已经被统一了。具体来说,QList 现在基本上就是 QVector 的一个别名。这一改变意味着 QList 和 QVector 具有相同的性能和行为特性。 在 Qt5 中,QList 有自己的内部实现,对小型对象&a…...
第三期书生大模型实战营 第1关 Linux 基础知识
第三期书生大模型实战营 第1关 Linux 基础知识 第三期书生大模型实战营 第1关 Linux 基础知识InternStudio开发机创建SSH密钥配置通过本地客户端连接远程服务器通过本地VSCode连接远程服务器运行一个Python程序总结 第三期书生大模型实战营 第1关 Linux 基础知识 Hello大家好&a…...
分布式架构)
架构设计(1)分布式架构
分布式架构 分布式架构是一种将系统中的不同组件分布在多台计算机或节点上,通过网络进行通信和协作,以实现系统功能的架构设计。分布式架构通常用于构建大型、复杂的软件系统,具有高可伸缩性、高可用性和高性能等优点。下面是关于分布式架构…...

浅谈 React Hooks
React Hooks 是 React 16.8 引入的一组 API,用于在函数组件中使用 state 和其他 React 特性(例如生命周期方法、context 等)。Hooks 通过简洁的函数接口,解决了状态与 UI 的高度解耦,通过函数式编程范式实现更灵活 Rea…...

Vue记事本应用实现教程
文章目录 1. 项目介绍2. 开发环境准备3. 设计应用界面4. 创建Vue实例和数据模型5. 实现记事本功能5.1 添加新记事项5.2 删除记事项5.3 清空所有记事 6. 添加样式7. 功能扩展:显示创建时间8. 功能扩展:记事项搜索9. 完整代码10. Vue知识点解析10.1 数据绑…...

MongoDB学习和应用(高效的非关系型数据库)
一丶 MongoDB简介 对于社交类软件的功能,我们需要对它的功能特点进行分析: 数据量会随着用户数增大而增大读多写少价值较低非好友看不到其动态信息地理位置的查询… 针对以上特点进行分析各大存储工具: mysql:关系型数据库&am…...

Qt Widget类解析与代码注释
#include "widget.h" #include "ui_widget.h"Widget::Widget(QWidget *parent): QWidget(parent), ui(new Ui::Widget) {ui->setupUi(this); }Widget::~Widget() {delete ui; }//解释这串代码,写上注释 当然可以!这段代码是 Qt …...

JVM垃圾回收机制全解析
Java虚拟机(JVM)中的垃圾收集器(Garbage Collector,简称GC)是用于自动管理内存的机制。它负责识别和清除不再被程序使用的对象,从而释放内存空间,避免内存泄漏和内存溢出等问题。垃圾收集器在Ja…...
Keil 中设置 STM32 Flash 和 RAM 地址详解
文章目录 Keil 中设置 STM32 Flash 和 RAM 地址详解一、Flash 和 RAM 配置界面(Target 选项卡)1. IROM1(用于配置 Flash)2. IRAM1(用于配置 RAM)二、链接器设置界面(Linker 选项卡)1. 勾选“Use Memory Layout from Target Dialog”2. 查看链接器参数(如果没有勾选上面…...

ios苹果系统,js 滑动屏幕、锚定无效
现象:window.addEventListener监听touch无效,划不动屏幕,但是代码逻辑都有执行到。 scrollIntoView也无效。 原因:这是因为 iOS 的触摸事件处理机制和 touch-action: none 的设置有关。ios有太多得交互动作,从而会影响…...
C++ Visual Studio 2017厂商给的源码没有.sln文件 易兆微芯片下载工具加开机动画下载。
1.先用Visual Studio 2017打开Yichip YC31xx loader.vcxproj,再用Visual Studio 2022打开。再保侟就有.sln文件了。 易兆微芯片下载工具加开机动画下载 ExtraDownloadFile1Info.\logo.bin|0|0|10D2000|0 MFC应用兼容CMD 在BOOL CYichipYC31xxloaderDlg::OnIni…...

MySQL 8.0 事务全面讲解
以下是一个结合两次回答的 MySQL 8.0 事务全面讲解,涵盖了事务的核心概念、操作示例、失败回滚、隔离级别、事务性 DDL 和 XA 事务等内容,并修正了查看隔离级别的命令。 MySQL 8.0 事务全面讲解 一、事务的核心概念(ACID) 事务是…...

iview框架主题色的应用
1.下载 less要使用3.0.0以下的版本 npm install less2.7.3 npm install less-loader4.0.52./src/config/theme.js文件 module.exports {yellow: {theme-color: #FDCE04},blue: {theme-color: #547CE7} }在sass中使用theme配置的颜色主题,无需引入,直接可…...