GD32F303之CAN通信
1、CAN时钟
GD32F303主时钟频率最大是120Mhz,然后APB1时钟最大是60Mhz,APB2时钟最大是120Mhz,CAN挂载在APB1总线上面


所以一般CAN的时钟频率是60Mhz,这个频率和后面配置波特率有关
2、GD32F303时钟配置
首先我们知道芯片有几个时钟
HXTAL:高速外部时钟;
LXTAL:低速外部时钟;
IRC8M:高速内部时钟;
IRC40K:低速内部时钟;
代码配置时钟时我们要确定时选择内部晶振还是外部晶振,他们配置频率都不一样,例如下面的宏定义可以配置不同的时钟频率

比如 如果定义了__SYSTEM_CLOCK_120M_PLL_IRC8M宏定义,那么芯片时钟采用内部晶振8Mhz,然后主时钟频率是120Mhz
如果定义了__SYSTEM_CLOCK_120M_PLL_HXTAL宏定义,那么芯片时钟采用外部晶振时钟,这个晶振一般都是8Mhz,但是针对不同的系列有所不一样,比如GD32F303RET6的外部晶振就是12Mhz,然后使能__SYSTEM_CLOCK_120M_PLL_HXTAL宏定义之后他的主时钟频率不是120Mhz,看代码可知 (12/2)*30不等于120Mhz,所以时钟的频率需要确定好,下面这个代码只适配外部晶振是8Mhz的。

3、CAN的波特率配置
首先我们需要知道波特率的计算公式,其中的PCLK就是CAN挂载总线APB1的时钟,一般为60Mhz,如果我们配置为下面的参数,及代表着CAN的波特率为250kbits。

/* baudrate 250Kbps */can_parameter.resync_jump_width=CAN_BT_SJW_1TQ;can_parameter.time_segment_1 = CAN_BT_BS1_14TQ;can_parameter.time_segment_2 = CAN_BT_BS2_1TQ;can_parameter.prescaler = 15;4、CAN通信代码
can.c
//can.c文件
#include "can.h"
#include "led.h"void gd32_can_init(void)
{can_parameter_struct can_parameter;can_filter_parameter_struct can_filter;/* initialize CAN register */can_deinit(CAN0);/* enable CAN clock */rcu_periph_clock_enable(RCU_CAN0);rcu_periph_clock_enable(RCU_GPIOA);//使能时钟gpio_init(GPIOA, GPIO_MODE_IPU, GPIO_OSPEED_50MHZ,GPIO_PIN_11);gpio_init(GPIOA, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ,GPIO_PIN_12);//IO复用为CAN功能/* configure CAN0 NVIC */nvic_irq_enable(CAN0_RX1_IRQn,0,0); //中断配置can_struct_para_init(CAN_INIT_STRUCT, &can_parameter);can_struct_para_init(CAN_FILTER_STRUCT, &can_filter);//初始化参数/* baudrate 250Kbps */can_parameter.time_segment_1 = CAN_BT_BS1_14TQ;can_parameter.time_segment_2 = CAN_BT_BS2_1TQ;can_parameter.prescaler = 15;/* initialize CAN */can_init(CAN0, &can_parameter);can_filter.filter_fifo_number = CAN_FIFO1;can_filter.filter_enable = ENABLE;can_filter_init(&can_filter);/* enable can receive FIFO0 not empty interrupt */can_interrupt_enable(CAN0, CAN_INT_RFNE1|CAN_INT_TME);}/*CAN通信数据发送can_frame---要发送的数据发送成功返回0,失败返回1
*/
uint8_t gd32_can_send(can_trasnmit_message_struct can_frame)
{ uint8_t ret=0;ret = can_message_transmit(CAN0,&can_frame);if(ret == CAN_NOMAILBOX){return 1;}return 0;
}/*CAN出错--重启CAN
*/
void gd32_can_error(void)
{if( can_flag_get(CAN0, CAN_FLAG_MTE2) != RESET ||can_flag_get(CAN0, CAN_FLAG_MTE0) != RESET ||can_flag_get(CAN0, CAN_FLAG_MTE1) != RESET || can_flag_get(CAN0, CAN_FLAG_PERR) != RESET ||can_flag_get(CAN0, CAN_FLAG_WERR) != RESET){can_flag_clear(CAN0, CAN_FLAG_MTE0);can_flag_clear(CAN0, CAN_FLAG_MTE1);can_flag_clear(CAN0, CAN_FLAG_MTE2);can_flag_clear(CAN0, CAN_FLAG_PERR);can_flag_clear(CAN0, CAN_FLAG_WERR);can_wakeup(CAN0);gd32_can_init();}
}/*CAN接收中断函数
*/
void CAN0_RX1_IRQHandler(void)
{can_receive_message_struct can_mes;memset(&can_mes,0,sizeof(can_mes)); can_message_receive(CAN0, CAN_FIFO1, &can_mes); LED1_ON();
}
can.h
#ifndef __CAN_H
#define __CAN_H#include "gd32f30x.h"
#include "string.h"void gd32_can_init(void);
uint8_t gd32_can_send(can_trasnmit_message_struct can_frame);
void gd32_can_error(void);#endifmain.c
//CAN初始化gd32_can_init();transmit_message.tx_sfid = 0x7ab;transmit_message.tx_efid = 0x00;transmit_message.tx_ft = CAN_FT_DATA;//帧的类型:数据帧或者遥控帧transmit_message.tx_ff = CAN_FF_STANDARD;//帧的格式:标准帧或者拓展帧transmit_message.tx_dlen = 8;//数据长度小于8transmit_message.tx_data[0] = 0x55;transmit_message.tx_data[1] = 0x55;transmit_message.tx_data[2] = 0x55;transmit_message.tx_data[3] = 0x55;transmit_message.tx_data[4] = 0x55;transmit_message.tx_data[5] = 0x55;transmit_message.tx_data[6] = 0x55;transmit_message.tx_data[7] = 0x55;gd32_can_send(transmit_message);5、USBCAN-II+的指示灯含义
如果sys 亮绿灯,则代表驱动安装成功,如果亮红灯,则表示驱动安装失败
如果CAN0或者CAN1的绿灯常亮,说明开始通信

6、CAN通信失败原因可能
(1)波特率和上位机没有一一配对
(2) CAN的时钟频率配置问题
(3)CANtest上位机如果一直出现打开设备失败,则选择使用ZCanPro上位机
(4)可以使用示波器挂一下单片机的两个输出引脚,是否有波形发出,如果有,说明软件发出了数据,然后挂载另一边,检查芯片是否有问题
(5)打开上位机然后CAN盒一直闪红灯,说明通信有问题
问题1:错误帧一直累加,说明单片机已经发出数据帧,但是帧的内容存在问题,原因可能是上位机和单片机的波特率不匹配
问题2:接收帧和错误帧都会累加,但是接收帧的帧ID,数据长度和内容都存在问题,原因可能是主时钟频率或者CAN频率出现问题
7、USBCAN-II+驱动下载
驱动下载 (zlg.cn)

总结:主时钟频率是程序的基础,针对和时钟有关的代码,必须将时钟频率调准再写,比如选择外部时钟源,具体是8Mhz还是12Mhz,比如选取完外部时钟源时钟分频和倍频是否正确。
相关文章:
GD32F303之CAN通信
1、CAN时钟 GD32F303主时钟频率最大是120Mhz,然后APB1时钟最大是60Mhz,APB2时钟最大是120Mhz,CAN挂载在APB1总线上面 所以一般CAN的时钟频率是60Mhz,这个频率和后面配置波特率有关 2、GD32F303时钟配置 首先我们知道芯片有几个时钟 HXTAL:高速外部时钟࿱…...

postgres 的dblink使用,远程连接数据库
一.安装下载 dblink create extension if not exists dblink 查看是否已经安装 select * from pg_extension;二.运行,查询数据 其中,第一个参数是dblink名字,也可以是连接字符串。 第二个参数是要执行的SQL查询语句。AS子句用于指定返回结…...

短视频矩阵系统是什么?怎么搭建短视频矩阵系统?一文了解矩阵模式
在数字时代,短视频已成为信息传播的新宠,而短视频矩阵系统则是品牌和个人在短视频领域取得突破的重要工具。那么,短视频矩阵系统究竟是什么?如何搭建这样一个高效的系统?它又能够解决哪些问题呢?本文将为您…...

查看centos硬盘大小
直接上命令 lsblk...
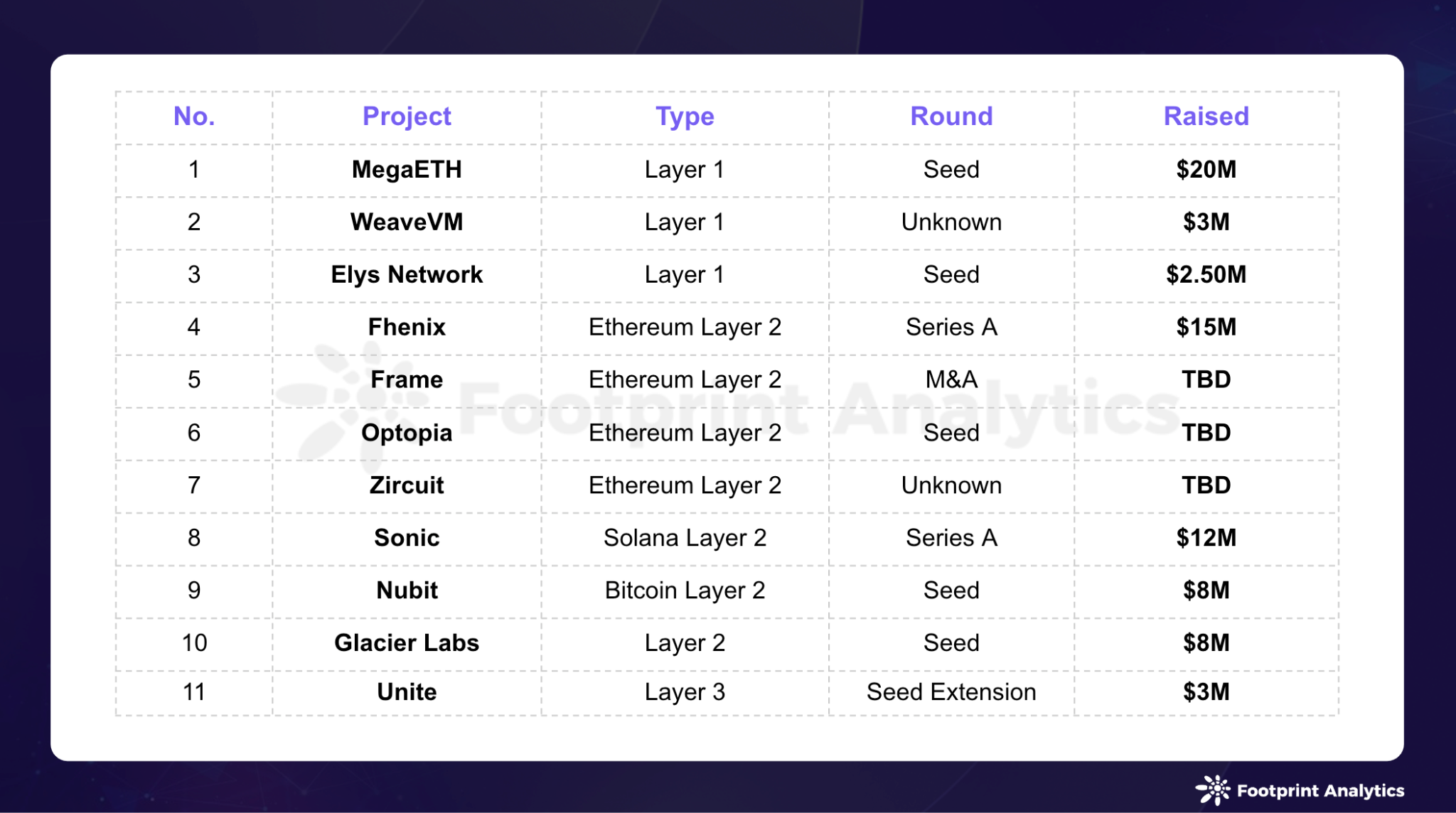
2024 年 6 月公链行业研报:市场回调,比特币和以太坊 Layer 2 表现各异
作者:stellafootprint.network 数据来源:公链 Research 页面 六月,加密货币市场经历了显著的挑战。比特币因即将到来的 Mt. Gox 赔偿支付及政府清算的压力,导致市场不确定性加剧。尽管美国现货以太坊 ETF 的推进带来了积极信号…...

SAP S4 销售组的定义和分配
spro-企业结构-定义-销售与分销-维护销售组 新增一个记录 spro-企业结构-分配-销售与分销-给销售办公室分配销售组...

实时数仓和离线数仓的区别是什么,企业该如何选择合适的数仓架构?
目录 一、离线数仓 1. 离线数仓是什么? 2. 离线数仓的特点 3. 离线数仓的适用场景 二、实时数仓 1. 实时数仓是什么? 2. 实时数仓的特点 3. 实时数仓的适用场景 三、由数仓需求变化带来的数据仓库架构的演变 1. 传统数仓架构 2. 离线大数据架构 3. Lambd…...

花所Flower非小号排名20名下载花所Flower
1、Flower花所介绍 Flower花所是一家新兴的数字货币交易平台,致力于为全球用户提供安全、便捷的交易体验。平台以其强大的技术支持和丰富的交易产品闻名,为用户提供多样化的数字资产交易服务,涵盖了主流和新兴数字货币的交易需求。 2. Flowe…...

程序员有哪些职位?
互联网行业中的岗位种类繁多、五花八门,学习一门技术后,重要的是找到合适的职业发展方向,程序员有哪些职业发展方向?一起来看看吧! 1.架构师 架构师需要程序员有强大的技术实力和深厚的技术积累。建筑师的成长需要经…...

python+Selenium自动化之免登录(cookie及token)
目录 cookie免登录 通过接口获取cookie 启用浏览器绕过登录 添加token 使用登录可以减去每次登录的重复操作,直接操作系统登录后的菜单页面,也可以减少安全验证登录,如图像验证登录的操作。注意:cookie和token都有有效期。 c…...

Web安全:SQL注入
一、SQL注入三要素 1、用户可以对输入的参数值进行修改。 2、后端不对用户输入的参数值进行严格过滤。 3、用户修改后的参数值可以被带入后端中成功执行,并返回一定结果。 二、SQL注入原理 简单来说,用户输入的值会被插入到SQL语句中,然后…...

【LLM-驯化】成功配置多模态大模型InternLM-XComposer微调环境
【LLM-驯化】成功配置多模态大模型InternLM-XComposer微调环境 本次修炼方法请往下查看 🌈 欢迎莅临我的个人主页 👈这里是我工作、学习、实践 IT领域、真诚分享 踩坑集合,智慧小天地! 🎇 免费获取相关内容文档关注&am…...

C++·继承
面向对象编程有三大特性:封装、继承、多态。 封装我们前几节已经讲过了,第一层封装是将一个数据和方法都封装到一个类中,想让用户访问的定义成公有,不想让用户访问的定义成私有,第二层封装就类似于迭代器、适配器的思想…...

2024最适合小白的Midjourney教程,值得收藏!
一、Midjourney 的提示词 1、提示可以包括一个或多个图像 URL、多个文本短语以及一个或多个参数 1)Image Prompts(图像提示):可以将图像 URL 添加到提示中以影响最终结果的样式和内容。图像 URL 始终出现在提示的前面。文件应以.…...

MVC 返回集合方法,以及分页
返回一个数据集方法 返回多个数据集方法 》》定义一个Model public class IndexMoel {public List<UserGroup> UserGroup{get;set;}public List<User> User{get;set;}}》》》控制器 //db 是 EF 中的上下文 var listnew IndexModel(); list.UserGroupdb.UserGro…...
昇思MindSpore学习笔记6-05计算机视觉--SSD目标检测
摘要: 记录MindSpore AI框架使用SSD目标检测算法对图像内容识别的过程、步骤和方法。包括环境准备、下载数据集、数据采样、数据集加载和预处理、构建模型、损失函数、模型训练、模型评估等。 一、概念 1.模型简介 SSD目标检测算法 Single Shot MultiBox Detecto…...

vb.netcad二开自学笔记9:界面之ribbon
一个成熟的软件怎么能没有ribbon呢,在前面的框架基础上再加个命令AddRibbon <CommandMethod("AddRibbon")> Public Sub AddRibbon() Dim ribbonControl As RibbonControl ComponentManager.Ribbon Dim tab As RibbonTab New RibbonTab() tab.Tit…...

学习笔记——动态路由——OSPF链路状态通告(LSA)
十、OSPF链路状态通告(LSA) 1、链路状态通告简介 (1)LAS概述 链路状态通告(Link State Advertisement,LSA)是路由器之间链路状态信息的载体。LSA是LSDB的最小组成单位,LSDB由一条条LSA构成的。是OSPF中计算路由的重要依据。 LSA用于向其它邻接OSPF路…...

模拟防止重复提交
gitee地址(需要自取)AopProxy重复提交: 防止重复提交 (gitee.com) RestController public class SubmissionController {Autowiredprivate SubmissionService submissionService;private static Jedis jedis new Jedis("localhost",6379);pr…...

C++:strcut与class的区别
在C中,struct和class在语法上非常相似,但它们之间确实存在一些关键的差异,这些差异主要体现在成员的默认访问权限和继承的默认方式上。然而,从更广泛的角度来看,它们都可以用来定义自定义数据类型,包含数据…...
第19节 Node.js Express 框架
Express 是一个为Node.js设计的web开发框架,它基于nodejs平台。 Express 简介 Express是一个简洁而灵活的node.js Web应用框架, 提供了一系列强大特性帮助你创建各种Web应用,和丰富的HTTP工具。 使用Express可以快速地搭建一个完整功能的网站。 Expre…...
微信小程序之bind和catch
这两个呢,都是绑定事件用的,具体使用有些小区别。 官方文档: 事件冒泡处理不同 bind:绑定的事件会向上冒泡,即触发当前组件的事件后,还会继续触发父组件的相同事件。例如,有一个子视图绑定了b…...
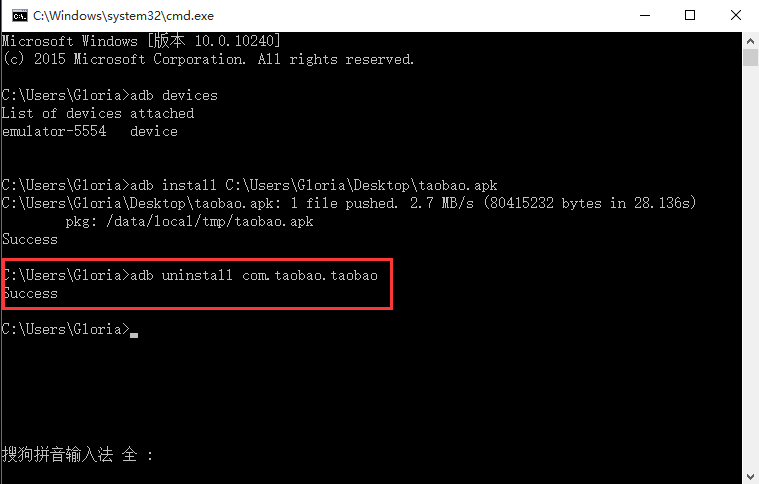
Appium+python自动化(十六)- ADB命令
简介 Android 调试桥(adb)是多种用途的工具,该工具可以帮助你你管理设备或模拟器 的状态。 adb ( Android Debug Bridge)是一个通用命令行工具,其允许您与模拟器实例或连接的 Android 设备进行通信。它可为各种设备操作提供便利,如安装和调试…...

Java - Mysql数据类型对应
Mysql数据类型java数据类型备注整型INT/INTEGERint / java.lang.Integer–BIGINTlong/java.lang.Long–––浮点型FLOATfloat/java.lang.FloatDOUBLEdouble/java.lang.Double–DECIMAL/NUMERICjava.math.BigDecimal字符串型CHARjava.lang.String固定长度字符串VARCHARjava.lang…...
微信小程序 - 手机震动
一、界面 <button type"primary" bindtap"shortVibrate">短震动</button> <button type"primary" bindtap"longVibrate">长震动</button> 二、js逻辑代码 注:文档 https://developers.weixin.qq…...

Python如何给视频添加音频和字幕
在Python中,给视频添加音频和字幕可以使用电影文件处理库MoviePy和字幕处理库Subtitles。下面将详细介绍如何使用这些库来实现视频的音频和字幕添加,包括必要的代码示例和详细解释。 环境准备 在开始之前,需要安装以下Python库:…...

鱼香ros docker配置镜像报错:https://registry-1.docker.io/v2/
使用鱼香ros一件安装docker时的https://registry-1.docker.io/v2/问题 一键安装指令 wget http://fishros.com/install -O fishros && . fishros出现问题:docker pull 失败 网络不同,需要使用镜像源 按照如下步骤操作 sudo vi /etc/docker/dae…...

工业自动化时代的精准装配革新:迁移科技3D视觉系统如何重塑机器人定位装配
AI3D视觉的工业赋能者 迁移科技成立于2017年,作为行业领先的3D工业相机及视觉系统供应商,累计完成数亿元融资。其核心技术覆盖硬件设计、算法优化及软件集成,通过稳定、易用、高回报的AI3D视觉系统,为汽车、新能源、金属制造等行…...

在WSL2的Ubuntu镜像中安装Docker
Docker官网链接: https://docs.docker.com/engine/install/ubuntu/ 1、运行以下命令卸载所有冲突的软件包: for pkg in docker.io docker-doc docker-compose docker-compose-v2 podman-docker containerd runc; do sudo apt-get remove $pkg; done2、设置Docker…...
Spring数据访问模块设计
前面我们已经完成了IoC和web模块的设计,聪明的码友立马就知道了,该到数据访问模块了,要不就这俩玩个6啊,查库势在必行,至此,它来了。 一、核心设计理念 1、痛点在哪 应用离不开数据(数据库、No…...