opencv—常用函数学习_“干货“_5
目录
十五、图像分割
简单阈值分割 (threshold)
自适应阈值分割 (adaptiveThreshold)
颜色范围分割 (inRange)
分水岭算法 (watershed)
泛洪填充 (floodFill)
GrabCut算法 (grabCut)
距离变换 (distanceTransform)
最大稳定极值区域检测 (MSER)
均值漂移滤波 (pyrMeanShiftFiltering)
十六、连通域
计算连通组件 (connectedComponents)
计算连通组件并返回统计信息 (connectedComponentsWithStats)
解释
http://t.csdnimg.cn/i8pqt —— opencv—常用函数学习_“干货“_总(VIP)
散的正在一部分一部分发,不需要VIP。
资料整理不易,有用话给个赞和收藏吧。
十五、图像分割
在OpenCV中,图像分割是将图像分割成不同区域或对象的过程,常用于对象检测、识别和图像分析。下面介绍一些常用的图像分割函数及其使用示例。
| 图像分割函数 | ||||
| threshold | adaptiveThreshold | inRange | watershed | floodFill |
| 简单阈值分割 | 自适应阈值分割 | 颜色范围分割 | 分水岭算法 | 泛洪填充 |
| grabCut | distanceTransform | MSER | pyrMeanShiftFiltering | |
| GrabCut算法 | 距离变换 | 最大稳定极值区域检测 | 均值漂移滤波 | |
简单阈值分割 (threshold)
import cv2
import numpy as np# 读取图像
image = cv2.imread('path_to_image.jpg', cv2.IMREAD_GRAYSCALE)# 应用简单阈值分割
_, binary_image = cv2.threshold(image, 127, 255, cv2.THRESH_BINARY)
cv2.imshow('Binary Image', binary_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
自适应阈值分割 (adaptiveThreshold)
# 应用自适应阈值分割
adaptive_thresh = cv2.adaptiveThreshold(image, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C,cv2.THRESH_BINARY, 11, 2)
cv2.imshow('Adaptive Threshold Image', adaptive_thresh)
cv2.waitKey(0)
cv2.destroyAllWindows()
颜色范围分割 (inRange)
# 读取彩色图像
color_image = cv2.imread('path_to_image.jpg')# 定义颜色范围
lower_bound = np.array([0, 120, 70])
upper_bound = np.array([10, 255, 255])# 转换到HSV颜色空间
hsv_image = cv2.cvtColor(color_image, cv2.COLOR_BGR2HSV)# 应用颜色范围分割
mask = cv2.inRange(hsv_image, lower_bound, upper_bound)
cv2.imshow('Mask', mask)
cv2.waitKey(0)
cv2.destroyAllWindows()
分水岭算法 (watershed)
# 读取图像并转换为灰度图
gray = cv2.cvtColor(color_image, cv2.COLOR_BGR2GRAY)
_, binary = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)# 确定背景区域
kernel = np.ones((3, 3), np.uint8)
sure_bg = cv2.dilate(binary, kernel, iterations=3)# 确定前景区域
dist_transform = cv2.distanceTransform(binary, cv2.DIST_L2, 5)
_, sure_fg = cv2.threshold(dist_transform, 0.7 * dist_transform.max(), 255, 0)# 确定未知区域
sure_fg = np.uint8(sure_fg)
unknown = cv2.subtract(sure_bg, sure_fg)# 标记连通组件
_, markers = cv2.connectedComponents(sure_fg)# 为确保背景为1,增加1
markers = markers + 1# 将未知区域标记为0
markers[unknown == 255] = 0# 应用分水岭算法
markers = cv2.watershed(color_image, markers)
color_image[markers == -1] = [0, 0, 255]cv2.imshow('Watershed', color_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
泛洪填充 (floodFill)
# 应用泛洪填充
flood_filled = color_image.copy()
h, w = flood_filled.shape[:2]
mask = np.zeros((h + 2, w + 2), np.uint8)
cv2.floodFill(flood_filled, mask, (0, 0), (255, 0, 0))cv2.imshow('Flood Fill', flood_filled)
cv2.waitKey(0)
cv2.destroyAllWindows()
GrabCut算法 (grabCut)
# 初始化掩码
mask = np.zeros(color_image.shape[:2], np.uint8)# 定义矩形
rect = (50, 50, 450, 290)# 定义模型
bgdModel = np.zeros((1, 65), np.float64)
fgdModel = np.zeros((1, 65), np.float64)# 应用GrabCut算法
cv2.grabCut(color_image, mask, rect, bgdModel, fgdModel, 5, cv2.GC_INIT_WITH_RECT)
mask2 = np.where((mask == 2) | (mask == 0), 0, 1).astype('uint8')
grabcut_image = color_image * mask2[:, :, np.newaxis]cv2.imshow('GrabCut', grabcut_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
距离变换 (distanceTransform)
# 应用距离变换
dist_transform = cv2.distanceTransform(binary, cv2.DIST_L2, 5)
cv2.imshow('Distance Transform', dist_transform)
cv2.waitKey(0)
cv2.destroyAllWindows()
最大稳定极值区域检测 (MSER)
# 创建MSER对象
mser = cv2.MSER_create()# 检测MSER区域
regions, _ = mser.detectRegions(gray)# 绘制检测到的区域
output = color_image.copy()
for p in regions:hull = cv2.convexHull(p.reshape(-1, 1, 2))cv2.polylines(output, [hull], 1, (0, 255, 0))cv2.imshow('MSER', output)
cv2.waitKey(0)
cv2.destroyAllWindows()
均值漂移滤波 (pyrMeanShiftFiltering)
# 应用均值漂移滤波
mean_shift_image = cv2.pyrMeanShiftFiltering(color_image, 21, 51)
cv2.imshow('Mean Shift Filtering', mean_shift_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
这些示例展示了如何使用OpenCV中的各种图像分割函数来处理图像。根据具体的应用需求,可以灵活运用这些函数来实现复杂的图像分割任务。
十六、连通域
在OpenCV中,连通域分析是图像处理中的一个重要步骤,用于检测和标记图像中的连通区域。主要有两个函数:connectedComponents 和 connectedComponentsWithStats。下面介绍这些函数及其使用示例。
| 连通域分析函数 | |
| connectedComponents | connectedComponentsWithStats |
| 计算连通组件 | 计算连通组件并返回统计信息 |
计算连通组件 (connectedComponents)
import cv2
import numpy as np# 读取图像并转换为灰度图
image = cv2.imread('path_to_image.jpg', cv2.IMREAD_GRAYSCALE)# 应用阈值处理
_, binary_image = cv2.threshold(image, 127, 255, cv2.THRESH_BINARY)# 计算连通组件
num_labels, labels = cv2.connectedComponents(binary_image)# 显示结果
label_hue = np.uint8(179 * labels / np.max(labels))
blank_ch = 255 * np.ones_like(label_hue)
labeled_img = cv2.merge([label_hue, blank_ch, blank_ch])# 转换到BGR颜色空间
labeled_img = cv2.cvtColor(labeled_img, cv2.COLOR_HSV2BGR)# 设置背景为黑色
labeled_img[label_hue == 0] = 0cv2.imshow('Connected Components', labeled_img)
cv2.waitKey(0)
cv2.destroyAllWindows()
计算连通组件并返回统计信息 (connectedComponentsWithStats)
# 计算连通组件及统计信息
num_labels, labels, stats, centroids = cv2.connectedComponentsWithStats(binary_image)# 输出每个连通组件的统计信息
for i in range(num_labels):print(f"Component {i}:")print(f" Bounding box: {stats[i, cv2.CC_STAT_LEFT]}, {stats[i, cv2.CC_STAT_TOP]}, "f"{stats[i, cv2.CC_STAT_WIDTH]}, {stats[i, cv2.CC_STAT_HEIGHT]}")print(f" Area: {stats[i, cv2.CC_STAT_AREA]}")print(f" Centroid: {centroids[i]}")# 显示结果
label_hue = np.uint8(179 * labels / np.max(labels))
blank_ch = 255 * np.ones_like(label_hue)
labeled_img = cv2.merge([label_hue, blank_ch, blank_ch])# 转换到BGR颜色空间
labeled_img = cv2.cvtColor(labeled_img, cv2.COLOR_HSV2BGR)# 设置背景为黑色
labeled_img[label_hue == 0] = 0cv2.imshow('Connected Components with Stats', labeled_img)
cv2.waitKey(0)
cv2.destroyAllWindows()
解释
connectedComponents:此函数返回连通组件的数量和每个像素所属的标签。connectedComponentsWithStats:此函数除了返回标签外,还返回每个连通组件的统计信息(如边界框、面积)和重心。
这些示例展示了如何使用OpenCV中的连通域分析函数来处理图像。根据具体的应用需求,可以灵活运用这些函数来实现复杂的连通域检测和分析任务。
相关文章:

opencv—常用函数学习_“干货“_5
目录 十五、图像分割 简单阈值分割 (threshold) 自适应阈值分割 (adaptiveThreshold) 颜色范围分割 (inRange) 分水岭算法 (watershed) 泛洪填充 (floodFill) GrabCut算法 (grabCut) 距离变换 (distanceTransform) 最大稳定极值区域检测 (MSER) 均值漂移滤波 (pyrMean…...

JAVA零基础学习1(CMD、JDK、环境变量、变量和键盘键入、IDEA)
JAVA零基础学习1(CMD、JDK、环境变量、变量和键盘键入、IDEA) CMD常见命令配置环境变量JDK的下载和安装变量变量的声明和初始化声明变量初始化变量 变量的类型变量的作用域变量命名规则示例代码 键盘键入使用 Scanner 类读取输入步骤示例代码 常用方法处…...
Redis的安装配置及IDEA中使用
目录 一、安装redis,配置redis.conf 1.安装gcc 2.将redis的压缩包放到指定位置解压 [如下面放在 /opt 目录下] 3.编译安装 4.配置redis.conf文件 5.开机自启 二、解决虚拟机本地可以连接redis但是主机不能连接redis 1.虚拟机网络适配器网络连接设置为桥接模式…...

ubuntu 物理内存爆炸而不使用虚拟内存的问题
ubuntu 物理内存不足时有时候会不去使用虚拟内存,让虚拟内存空闲,而直接关闭占用内存的进程,如果在进行模型测试或训练时,就会导致训练或测试进程被杀死。 1. 修改 swappiness: cat /proc/sys/vm/swappiness sudo sysc…...

Python实现音频均衡和降噪
使用librosa库来读取音频文件,音频处理是一个复杂过程,这里只是简单的进行降噪和均衡。 import librosa import soundfile as sf def improve_audio_quality(input_file, output_file): # 读取音频文件 audio, sample_rate librosa.load(input_…...

【JavaScript 算法】贪心算法:局部最优解的构建
🔥 个人主页:空白诗 文章目录 一、贪心算法的基本概念贪心算法的适用场景 二、经典问题及其 JavaScript 实现1. 零钱兑换问题2. 活动选择问题3. 分配问题 三、贪心算法的应用四、总结 贪心算法(Greedy Algorithm)是一种逐步构建解…...

Azcopy Sync同步Azure文件共享
文章目录 Azcopy Sync同步文件共享一、工作原理二、安装 AzCopy在 Windows 上在 Linux 上 三、资源准备1. 创建源和目标 Azure 存储账户2. 创建源和目标文件共享3. 确定路径4. 生成源和目的存储账户的共享访问签名(SAS)令牌配置权限示例生成的 URL 四、A…...

单例模式 饿汉式和懒汉式的区别
单例模式(Singleton Pattern)是设计模式中最简单、最常见、最容易实现的一种模式。它确保一个类仅有一个实例,并提供一个全局访问点。单例模式主要有两种实现方式:饿汉式(Eager Initialization)和懒汉式&am…...

Python中的模块和包的定义以及如何在Python中导入和使用它们
在Python中,模块(Module)和包(Package)是组织代码以便重用和共享的基本单元。它们使得Python代码更加模块化,易于管理和维护。 模块(Module) 模块是一个包含Python代码的文件&…...
)
设计模式使用场景实现示例及优缺点(结构型模式——组合模式)
结构型模式 组合模式(Composite Pattern) 组合模式使得用户对单个对象和组合对象的使用具有一致性。 有时候又叫做部分-整体模式,它使我们树型结构的问题中,模糊了简单元素和复杂元素的概念,客户程序可以像处理简单元…...

《系统架构设计师教程(第2版)》第11章-未来信息综合技术-06-云计算(Cloud Computing) 技术概述
文章目录 1. 相关概念2. 云计算的服务方式2.1 软件即服务 (SaaS)2.2 平台即服务 (PaaS)2.3 基础设施即服务 (IaaS)2.4 三种服务方式的分析2.4.1 在灵活性2.4.2 方便性方 3. 云计算的部署模式3.1 公有云3.2 社区云3.3 私有云3.4 混合云 4. 云计算的发展历程4.1 虚拟化技术4.2 分…...

网络安全工作者如何解决网络拥堵
网络如同现代社会的血管,承载着信息的血液流动。然而,随着数据流量的激增,网络拥堵已成为不容忽视的问题,它像是一场数字世界的交通堵塞,减缓了信息传递的速度,扰乱了网络空间的秩序。作为网络安全的守护者…...

电脑显示mfc140u.dll丢失的修复方法,总结7种有效的方法
mfc140u.dll是什么?为什么电脑会出现mfc140u.dll丢失?那么mfc140u.dll丢失会给电脑带来什么影响?mfc140u.dll丢失怎么办?今天详细给大家一一探讨一下mfc140u.dll文件与mfc140u.dll丢失的多种不同解决方法分享! 一、mfc…...

ospf的MGRE实验
第一步:配IP [R1-GigabitEthernet0/0/0]ip address 12.0.0.1 24 [R1-GigabitEthernet0/0/1]ip address 21.0.0.1 24 [R1-LoopBack0]ip address 192.168.1.1 24 [ISP-GigabitEthernet0/0/0]ip address 12.0.0.2 24 [ISP-GigabitEthernet0/0/1]ip address 21.0.0.2 24…...

开发指南047-前端模块版本
平台前端框架内置了一个文件version.vue <template> <div> <br> 应用名称: {{name}} <br> 当前版本:{{version}} <br> 服务网关: {{gateway}} </div> </template> <scrip…...

c#中的字符串方法
Concat() String.Concat(字符串1 字符串n) 字符串拼接 Contains () 字符串1.Contains(字符串2) 字符串1是否包含字符串2返回布尔值 CopyTo() 字符串1.CopyTo(0,空数组,0,5); 从哪开始 复制到哪里 从哪开始存 存储的个数 tartsWith 字符串1.StartsWith("字符串") 以…...

成像光谱遥感技术中的AI革命:ChatGPT
遥感技术主要通过卫星和飞机从远处观察和测量我们的环境,是理解和监测地球物理、化学和生物系统的基石。ChatGPT是由OpenAI开发的最先进的语言模型,在理解和生成人类语言方面表现出了非凡的能力,ChatGPT在遥感中的应用,人工智能在…...

学习分布式事务遇到的小bug
一、介绍Seata 在处理分布式事务时我用到是Seata,Seata的事务管理中有三个重要的角色: TC (Transaction Coordinator) - 事务协调者:维护全局和分支事务的状态,协调全局事务提交或回滚。 TM (Transaction Manager) - 事务管理器…...

ElasticSearch学习之路
前言 为什么学ElasticSearch? 数据一般有如下三种类型: 结构化数据,如:MySQL的表,一般通过索引提高查询效率非结构化数据,如:图片、音频等不能用表结构表示的数据,一般保存到mong…...
 翻转二叉树 对称二叉树 二叉树的深度)
(C++二叉树02) 翻转二叉树 对称二叉树 二叉树的深度
226、翻转二叉树 递归法: 交换两个结点可以用swap()方法 class Solution { public:TreeNode* invertTree(TreeNode* root) {if(root NULL) return NULL;TreeNode* tem root->left;root->left root->right;root->right tem;invertTree(root->l…...

谷歌浏览器插件
项目中有时候会用到插件 sync-cookie-extension1.0.0:开发环境同步测试 cookie 至 localhost,便于本地请求服务携带 cookie 参考地址:https://juejin.cn/post/7139354571712757767 里面有源码下载下来,加在到扩展即可使用FeHelp…...
黑马Mybatis
Mybatis 表现层:页面展示 业务层:逻辑处理 持久层:持久数据化保存 在这里插入图片描述 Mybatis快速入门 
【SpringBoot】100、SpringBoot中使用自定义注解+AOP实现参数自动解密
在实际项目中,用户注册、登录、修改密码等操作,都涉及到参数传输安全问题。所以我们需要在前端对账户、密码等敏感信息加密传输,在后端接收到数据后能自动解密。 1、引入依赖 <dependency><groupId>org.springframework.boot</groupId><artifactId...

vue3 字体颜色设置的多种方式
在Vue 3中设置字体颜色可以通过多种方式实现,这取决于你是想在组件内部直接设置,还是在CSS/SCSS/LESS等样式文件中定义。以下是几种常见的方法: 1. 内联样式 你可以直接在模板中使用style绑定来设置字体颜色。 <template><div :s…...

涂鸦T5AI手搓语音、emoji、otto机器人从入门到实战
“🤖手搓TuyaAI语音指令 😍秒变表情包大师,让萌系Otto机器人🔥玩出智能新花样!开整!” 🤖 Otto机器人 → 直接点明主体 手搓TuyaAI语音 → 强调 自主编程/自定义 语音控制(TuyaAI…...
mysql已经安装,但是通过rpm -q 没有找mysql相关的已安装包
文章目录 现象:mysql已经安装,但是通过rpm -q 没有找mysql相关的已安装包遇到 rpm 命令找不到已经安装的 MySQL 包时,可能是因为以下几个原因:1.MySQL 不是通过 RPM 包安装的2.RPM 数据库损坏3.使用了不同的包名或路径4.使用其他包…...

Spring AI与Spring Modulith核心技术解析
Spring AI核心架构解析 Spring AI(https://spring.io/projects/spring-ai)作为Spring生态中的AI集成框架,其核心设计理念是通过模块化架构降低AI应用的开发复杂度。与Python生态中的LangChain/LlamaIndex等工具类似,但特别为多语…...

【SSH疑难排查】轻松解决新版OpenSSH连接旧服务器的“no matching...“系列算法协商失败问题
【SSH疑难排查】轻松解决新版OpenSSH连接旧服务器的"no matching..."系列算法协商失败问题 摘要: 近期,在使用较新版本的OpenSSH客户端连接老旧SSH服务器时,会遇到 "no matching key exchange method found", "n…...
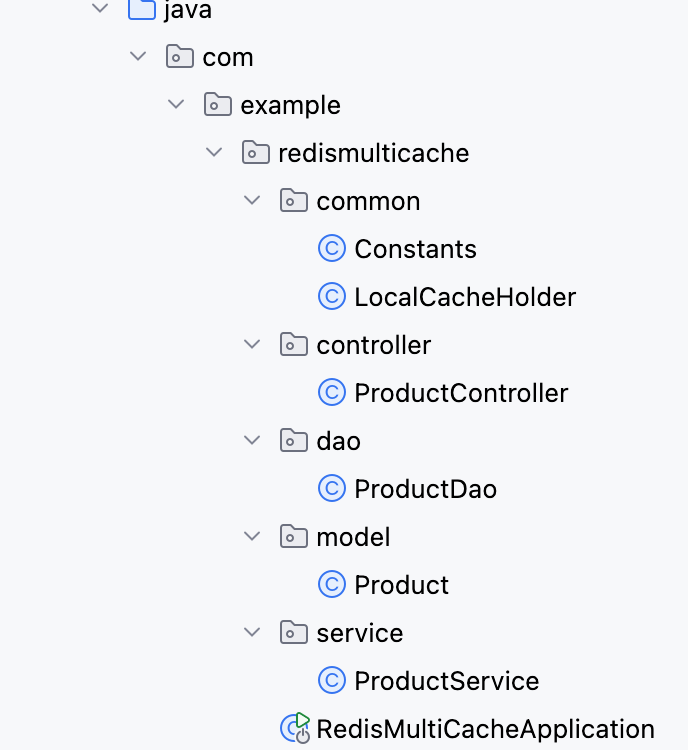
【Redis】笔记|第8节|大厂高并发缓存架构实战与优化
缓存架构 代码结构 代码详情 功能点: 多级缓存,先查本地缓存,再查Redis,最后才查数据库热点数据重建逻辑使用分布式锁,二次查询更新缓存采用读写锁提升性能采用Redis的发布订阅机制通知所有实例更新本地缓存适用读多…...
详细解析)
Caliper 负载(Workload)详细解析
Caliper 负载(Workload)详细解析 负载(Workload)是 Caliper 性能测试的核心部分,它定义了测试期间要执行的具体合约调用行为和交易模式。下面我将全面深入地讲解负载的各个方面。 一、负载模块基本结构 一个典型的负载模块(如 workload.js)包含以下基本结构: use strict;/…...