[RK3588-Android12] 关于如何取消usb-typec的pd充电功能
问题描述
RK3588取消usb-typec的pd充电功能
解决方案:
在dts中fusb302节点下usb_con: connector子节点下添加如下熟悉:

打上如下2个补丁
diff --git a/drivers/usb/typec/tcpm/tcpm.c b/drivers/usb/typec/tcpm/tcpm.c
index c8a4e57c9f9b..173f8cb75b8e 100644
--- a/drivers/usb/typec/tcpm/tcpm.c
+++ b/drivers/usb/typec/tcpm/tcpm.c
@@ -317,6 +317,7 @@ struct tcpm_port {struct typec_partner *partner;enum typec_cc_status cc_req;
+ enum typec_cc_status src_rp; /* work only if pd_supported == false */enum typec_cc_status cc1;enum typec_cc_status cc2;
@@ -324,6 +325,7 @@ struct tcpm_port {bool attached;bool connected;
+ bool pd_supported;enum typec_port_type port_type;/*
@@ -827,6 +829,9 @@ static enum typec_cc_status tcpm_rp_cc(struct tcpm_port *port)int nr_pdo = port->nr_src_pdo;int i;+ if (!port->pd_supported)
+ return port->src_rp;
+/** Search for first entry with matching voltage.* It should report the maximum supported current.
@@ -3682,9 +3687,11 @@ static int tcpm_src_attach(struct tcpm_port *port)if (ret < 0)return ret;- ret = port->tcpc->set_pd_rx(port->tcpc, true);
- if (ret < 0)
- goto out_disable_mux;
+ if (port->pd_supported) {
+ ret = port->tcpc->set_pd_rx(port->tcpc, true);
+ if (ret < 0)
+ goto out_disable_mux;
+ }/** USB Type-C specification, version 1.2,
@@ -3715,7 +3722,8 @@ static int tcpm_src_attach(struct tcpm_port *port)out_disable_vconn:tcpm_set_vconn(port, false);out_disable_pd:
- port->tcpc->set_pd_rx(port->tcpc, false);
+ if (port->pd_supported)
+ port->tcpc->set_pd_rx(port->tcpc, false);out_disable_mux:tcpm_mux_set(port, TYPEC_STATE_SAFE, USB_ROLE_NONE,TYPEC_ORIENTATION_NONE);
@@ -3931,6 +3939,20 @@ static enum typec_pwr_opmode tcpm_get_pwr_opmode(enum typec_cc_status cc)}}+static enum typec_cc_status tcpm_pwr_opmode_to_rp(enum typec_pwr_opmode opmode)
+{
+ switch (opmode) {
+ case TYPEC_PWR_MODE_USB:
+ return TYPEC_CC_RP_DEF;
+ case TYPEC_PWR_MODE_1_5A:
+ return TYPEC_CC_RP_1_5;
+ case TYPEC_PWR_MODE_3_0A:
+ case TYPEC_PWR_MODE_PD:
+ default:
+ return TYPEC_CC_RP_3_0;
+ }
+}
+static void run_state_machine(struct tcpm_port *port){int ret;
@@ -4061,6 +4083,10 @@ static void run_state_machine(struct tcpm_port *port)if (port->ams == POWER_ROLE_SWAP ||port->ams == FAST_ROLE_SWAP)tcpm_ams_finish(port);
+ if (!port->pd_supported) {
+ tcpm_set_state(port, SRC_READY, 0);
+ break;
+ }port->upcoming_state = SRC_SEND_CAPABILITIES;tcpm_ams_start(port, POWER_NEGOTIATION);break;
@@ -4333,7 +4359,10 @@ static void run_state_machine(struct tcpm_port *port)current_limit = PD_P_SNK_STDBY_MW / 5;tcpm_set_current_limit(port, current_limit, 5000);tcpm_set_charge(port, true);
- tcpm_set_state(port, SNK_WAIT_CAPABILITIES, 0);
+ if (!port->pd_supported)
+ tcpm_set_state(port, SNK_READY, 0);
+ else
+ tcpm_set_state(port, SNK_WAIT_CAPABILITIES, 0);break;}/*
@@ -4582,7 +4611,8 @@ static void run_state_machine(struct tcpm_port *port)tcpm_set_vbus(port, true);if (port->ams == HARD_RESET)tcpm_ams_finish(port);
- port->tcpc->set_pd_rx(port->tcpc, true);
+ if (port->pd_supported)
+ port->tcpc->set_pd_rx(port->tcpc, true);tcpm_set_attached_state(port, true);tcpm_set_state(port, SRC_UNATTACHED, PD_T_PS_SOURCE_ON);break;
@@ -6121,6 +6151,7 @@ EXPORT_SYMBOL_GPL(tcpm_tcpc_reset);static int tcpm_fw_get_caps(struct tcpm_port *port,struct fwnode_handle *fwnode){
+ const char *opmode_str;const char *cap_str;int ret;u32 mw, frs_current, pd_revision;
@@ -6153,22 +6184,37 @@ static int tcpm_fw_get_caps(struct tcpm_port *port,return ret;port->typec_caps.type = ret;port->port_type = port->typec_caps.type;
+ port->pd_supported = !fwnode_property_read_bool(fwnode, "pd-disable");port->slow_charger_loop = fwnode_property_read_bool(fwnode, "slow-charger-loop");if (port->port_type == TYPEC_PORT_SNK)goto sink;- /* Get source pdos */
- ret = fwnode_property_count_u32(fwnode, "source-pdos");
- if (ret <= 0)
- return -EINVAL;
+ /* Get Source PDOs for the PD port or Source Rp value for the non-PD port */
+ if (port->pd_supported) {
+ ret = fwnode_property_count_u32(fwnode, "source-pdos");
+ if (ret == 0)
+ return -EINVAL;
+ else if (ret < 0)
+ return ret;- port->nr_src_pdo = min(ret, PDO_MAX_OBJECTS);
- ret = fwnode_property_read_u32_array(fwnode, "source-pdos",
- port->src_pdo, port->nr_src_pdo);
- if ((ret < 0) || tcpm_validate_caps(port, port->src_pdo,
- port->nr_src_pdo))
- return -EINVAL;
+ port->nr_src_pdo = min(ret, PDO_MAX_OBJECTS);
+ ret = fwnode_property_read_u32_array(fwnode, "source-pdos",
+ port->src_pdo, port->nr_src_pdo);
+ if (ret)
+ return ret;
+ ret = tcpm_validate_caps(port, port->src_pdo, port->nr_src_pdo);
+ if (ret)
+ return ret;
+ } else {
+ ret = fwnode_property_read_string(fwnode, "typec-power-opmode", &opmode_str);
+ if (ret)
+ return ret;
+ ret = typec_find_pwr_opmode(opmode_str);
+ if (ret < 0)
+ return ret;
+ port->src_rp = tcpm_pwr_opmode_to_rp(ret);
+ }if (port->port_type == TYPEC_PORT_SRC)return 0;
@@ -6182,6 +6228,11 @@ static int tcpm_fw_get_caps(struct tcpm_port *port,if (port->typec_caps.prefer_role < 0)return -EINVAL;sink:
+ port->self_powered = fwnode_property_read_bool(fwnode, "self-powered");
+
+ if (!port->pd_supported)
+ return 0;
+/* Get sink pdos */ret = fwnode_property_count_u32(fwnode, "sink-pdos");if (ret <= 0)
@@ -6198,9 +6249,7 @@ static int tcpm_fw_get_caps(struct tcpm_port *port,return -EINVAL;port->operating_snk_mw = mw / 1000;- port->self_powered = fwnode_property_read_bool(fwnode, "self-powered");
-
- /* FRS can only be supported byb DRP ports */
+ /* FRS can only be supported by DRP ports */if (port->port_type == TYPEC_PORT_DRP) {ret = fwnode_property_read_u32(fwnode, "new-source-frs-typec-current",&frs_current);
--
diff --git a/drivers/usb/typec/tcpm/tcpm.c b/drivers/usb/typec/tcpm/tcpm.c
index 173f8cb75b8e..afeed1a05545 100644
--- a/drivers/usb/typec/tcpm/tcpm.c
+++ b/drivers/usb/typec/tcpm/tcpm.c
@@ -6512,6 +6512,13 @@ static int tcpm_psy_set_prop(struct power_supply *psy,struct tcpm_port *port = power_supply_get_drvdata(psy);int ret;+ /*
+ * All the properties below are related to USB PD. The check needs to be
+ * property specific when a non-pd related property is added.
+ */
+ if (!port->pd_supported)
+ return -EOPNOTSUPP;
+switch (psp) {case POWER_SUPPLY_PROP_ONLINE:ret = tcpm_psy_set_online(port, val);
--
相关文章:
[RK3588-Android12] 关于如何取消usb-typec的pd充电功能
问题描述 RK3588取消usb-typec的pd充电功能 解决方案: 在dts中fusb302节点下usb_con: connector子节点下添加如下熟悉: 打上如下2个补丁 diff --git a/drivers/usb/typec/tcpm/tcpm.c b/drivers/usb/typec/tcpm/tcpm.c index c8a4e57c9f9b..173f8cb7…...

分布式 I/O 系统 BL200 Modbus TCP 耦合器
BL200 耦合器是一个数据采集和控制系统,基于强大的 32 位微处理器设计,采用 Linux 操作系统,支持 Modbus 协议,可以快速接入现场 PLC、SCADA 以及 ERP 系统, 内置逻辑控制、边缘计算应用,适用于 IIoT 和工业…...

Java面试题--JVM大厂篇之Serial GC在JVM中有哪些优点和局限性
目录 引言: 正文: 一、Serial GC概述 二、Serial GC的优点 三、Serial GC的局限性 结束语: 引言: 在Java虚拟机(JVM)中,垃圾收集器(Garbage Collector, GC)是关键组件之一,负责自动管理内…...

【人工智能】机器学习 -- 贝叶斯分类器
目录 一、使用Python开发工具,运行对iris数据进行分类的例子程序NaiveBayes.py,熟悉sklearn机器实习开源库。 1. NaiveBayes.py 2. 运行结果 二、登录https://archive-beta.ics.uci.edu/ 三、使用sklearn机器学习开源库,使用贝叶斯分类器…...

深入理解 React 的 useSyncExternalStore Hook
深入理解 React 的 useSyncExternalStore Hook 大家好,今天我们来聊聊 React 18 引入的一个新 Hook:useSyncExternalStore。这个 Hook 主要用于与外部存储同步状态,特别是在需要确保状态一致性的场景下非常有用。本文将深入探讨这个 Hook 的…...
场:河南农业大学)
河南萌新联赛2024第(一)场:河南农业大学
C-有大家喜欢的零食吗_河南萌新联赛2024第(一)场:河南农业大学 (nowcoder.com) 思路:匈牙利算法的板子题. 二部图 int n; vector<int> vct[505]; int match[505],vis[505]; bool dfs(int s){for(auto v:vct[s]){if(vis[v]) continue;…...

K8S 上部署 Emqx
文章目录 安装方式一:1. 快速部署一个简单的 EMQX 集群:2. 部署一个持久化的 EMQX 集群:3. 部署 EMQX Edge 集群和 EMQX 企业版集群: 安装方式二:定制化部署1. 使用 Pod 直接部署 EMQX Broker2. 使用 Deoloyment 部署 …...

[React]利用Webcomponent封装React组件
[React]利用Webcomponent封装React组件 为什么这么做 我个人认为,最重要的点是可以很方便地跨框架挂载和卸载wc元素(至少我在项目里是这么玩的),此外,基于wc的css沙箱以及它的shadowRoot机制,可以提供一套…...

Linux C服务需要在A服务和B服务都启动成功后才能启动
需求 C服务需要在A服务和B服务都启动成功后才能启动 服务编号服务名服务Anginx.service服务Bmashang.service服务Credis.service 实验 如果您想要 redis.service 在 nginx.service 和 mashang.service 都成功启动后才能启动,那么需要在 redis.service 的服务单元…...

VSCODE 下 openocd Jlink 的配置笔记
title: VSCODE 下 openocd Jlink 的配置笔记 tags: STM32HalCubemax 文章目录 内容VSCODE 下 openocd Jlink 的配置笔记安装完成后修改jlink的配置文件然后修改你的下载器为jlink烧录你的项目绝对会出现下面的问题那么打开下载的第一个软件 (点到这个jlink右键&…...

JVM--HostSpot算法细节实现
1.根节点枚举 定义: 我们以可达性分析算法中从GC Roots 集合找引用链这个操作作为介绍虚拟机高效实现的第一个例 子。固定可作为GC Roots 的节点主要在全局性的引用(例如常量或类静态属性)与执行上下文(例如 栈帧中的本地变量表&a…...

【Unity实战100例】Unity声音可视化多种显示效果
目录 一、技术背景 二、界面搭建 三、 实现 UIAudioVisualizer 基类 四、实现 AudioSampler 类 五、实现 IAudioSample 接口 六、实现MusicAudioVisualizer 七、实现 MicrophoneAudioManager 类 八、实现 MicrophoneAudioVisualizer 类 九、源码下载 Unity声音可视化四…...

[Cesium for Supermap] 加载3dTiles,点击获取属性
代码: // 设为椭球var obj [6378137.0, 6378137.0, 6356752.3142451793];Cesium.Ellipsoid.WGS84 Object.freeze(new Cesium.Ellipsoid(obj[0], obj[1], obj[2]));var viewer new Cesium.Viewer(cesiumContainer);var scene viewer.scenescene.lightSource.ambi…...

【stm32项目】基于stm32智能宠物喂养(完整工程资料源码)
基于STM32宠物喂养系统 前言: 随着人们生活幸福指数的提高,越来越多的家庭选择养宠物来为生活增添乐趣。然而,由于工作等原因,许多主人无法及时为宠物提供充足的食物与水。为了解决这一问题,我设计了一款便捷的宠物喂…...

选择Maya进行3D动画制作与渲染的理由
如果你对3D动画充满热情并追求成为专业3D动画师的梦想,你一定听说过Maya——近年来3D动画的行业标准。Maya被3D艺术家广泛使用,你是否想知道为什么Maya总是他们的首选?下面一起来了解下。 一、什么是Maya? 由Autodesk开发的Maya是…...

Promise应用
创建一个 Promise 对象 let promise showLabelText() {return new Promise((resolve, reject) > {axios({method: "post",url: "/code/expose/interface/queryActionPlan",data: { situationOneId: 19999, labels: [1, 2, 3] }}).then(response > {…...

51单片机嵌入式开发:13、STC89C52RC 之 RS232与电脑通讯
STC89C52RC 之 RS232与电脑通讯 第十三节课,RS232与电脑通讯1 概述2 Uart介绍2.1 概述2.2 STC89C52UART介绍2.3 STC89C52 UART寄存器介绍2.4 STC89C52 UART操作 3 C51 UART总结 第十三节课,RS232与电脑通讯 1 概述 RS232(Recommended Stand…...

当代政治制度(练习题)
当代政治制度(练习题) Rz整理 仅供参考 干部鉴定必须坚持德才兼备原则,考核内容包括(A.德 B.廉 C.能 D.勤 F.绩 ) A.德 B.廉 C.能 D.勤 E.信 F.绩我国干部任用的方式主要包括(A.考任 C.委任 D.聘任 F.选任…...

前端pc和小程序接入快递100(跳转方式和api方式)====实时查询接口
文章目录 跳转方式微信小程序(我以uniapp为例)pc api接入说明关于签名计算成功示例 跳转方式 没有任何开发成本,直接一键接入 可以直接看官方文档 https://www.kuaidi100.com/openapi/api_wxmp.shtml 微信小程序(我以uniapp为例…...

电脑永久性不小心删除了东西还可以恢复吗 电脑提示永久性删除文件怎么找回 怎么恢复电脑永久删除的数据
永久删除电脑数据的操作,对于很多常用电脑设备的用户来说,可以说时有发生!但是,因为这些情况大都发生在不经意间,所以每每让广大用户感觉到十分苦恼。永久删除也有后悔药,轻松找回电脑中误删的文件。恢复文…...

<6>-MySQL表的增删查改
目录 一,create(创建表) 二,retrieve(查询表) 1,select列 2,where条件 三,update(更新表) 四,delete(删除表…...

基于服务器使用 apt 安装、配置 Nginx
🧾 一、查看可安装的 Nginx 版本 首先,你可以运行以下命令查看可用版本: apt-cache madison nginx-core输出示例: nginx-core | 1.18.0-6ubuntu14.6 | http://archive.ubuntu.com/ubuntu focal-updates/main amd64 Packages ng…...

vue3 定时器-定义全局方法 vue+ts
1.创建ts文件 路径:src/utils/timer.ts 完整代码: import { onUnmounted } from vuetype TimerCallback (...args: any[]) > voidexport function useGlobalTimer() {const timers: Map<number, NodeJS.Timeout> new Map()// 创建定时器con…...
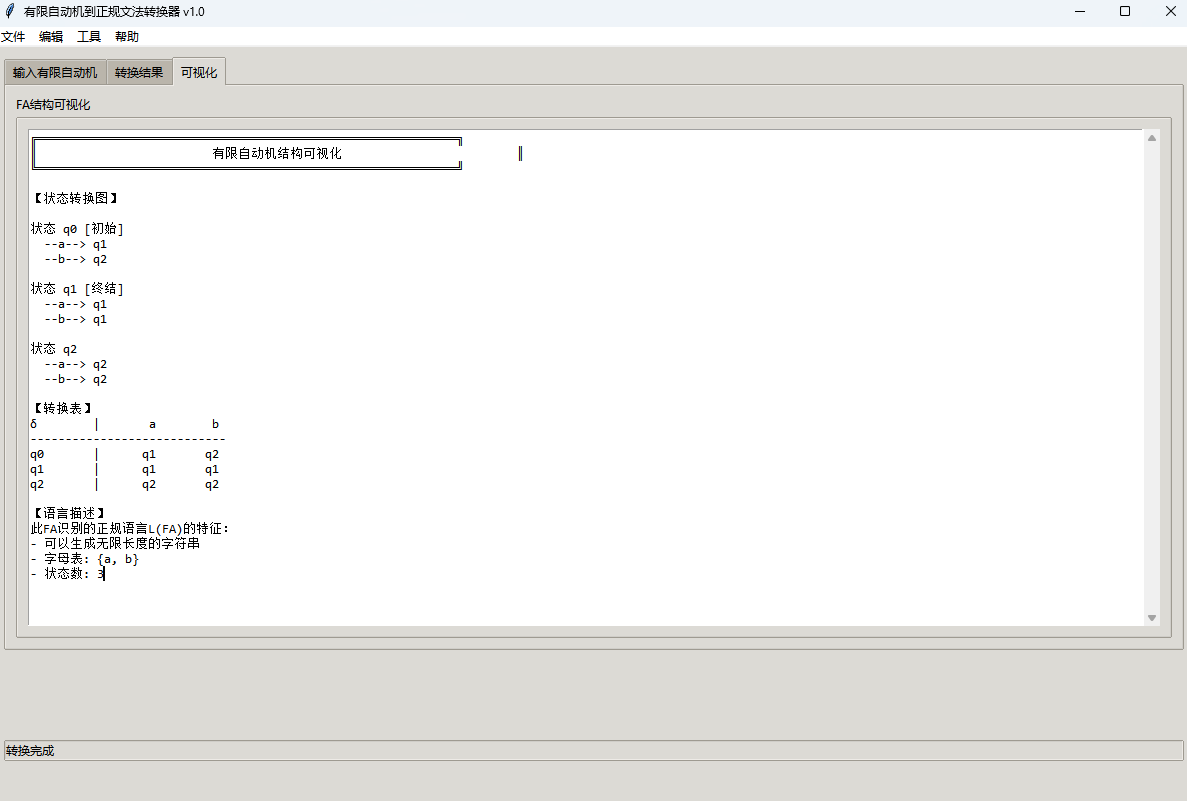
有限自动机到正规文法转换器v1.0
1 项目简介 这是一个功能强大的有限自动机(Finite Automaton, FA)到正规文法(Regular Grammar)转换器,它配备了一个直观且完整的图形用户界面,使用户能够轻松地进行操作和观察。该程序基于编译原理中的经典…...
中的KV缓存压缩与动态稀疏注意力机制设计)
大语言模型(LLM)中的KV缓存压缩与动态稀疏注意力机制设计
随着大语言模型(LLM)参数规模的增长,推理阶段的内存占用和计算复杂度成为核心挑战。传统注意力机制的计算复杂度随序列长度呈二次方增长,而KV缓存的内存消耗可能高达数十GB(例如Llama2-7B处理100K token时需50GB内存&a…...

Java求职者面试指南:计算机基础与源码原理深度解析
Java求职者面试指南:计算机基础与源码原理深度解析 第一轮提问:基础概念问题 1. 请解释什么是进程和线程的区别? 面试官:进程是程序的一次执行过程,是系统进行资源分配和调度的基本单位;而线程是进程中的…...
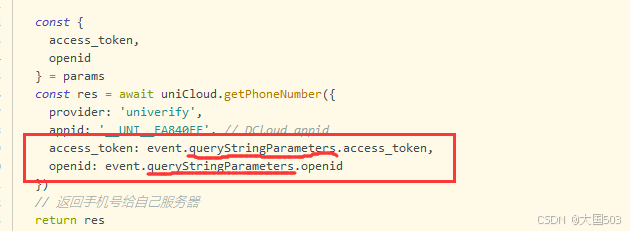
uniapp手机号一键登录保姆级教程(包含前端和后端)
目录 前置条件创建uniapp项目并关联uniClound云空间开启一键登录模块并开通一键登录服务编写云函数并上传部署获取手机号流程(第一种) 前端直接调用云函数获取手机号(第三种)后台调用云函数获取手机号 错误码常见问题 前置条件 手机安装有sim卡手机开启…...

PH热榜 | 2025-06-08
1. Thiings 标语:一套超过1900个免费AI生成的3D图标集合 介绍:Thiings是一个不断扩展的免费AI生成3D图标库,目前已有超过1900个图标。你可以按照主题浏览,生成自己的图标,或者下载整个图标集。所有图标都可以在个人或…...
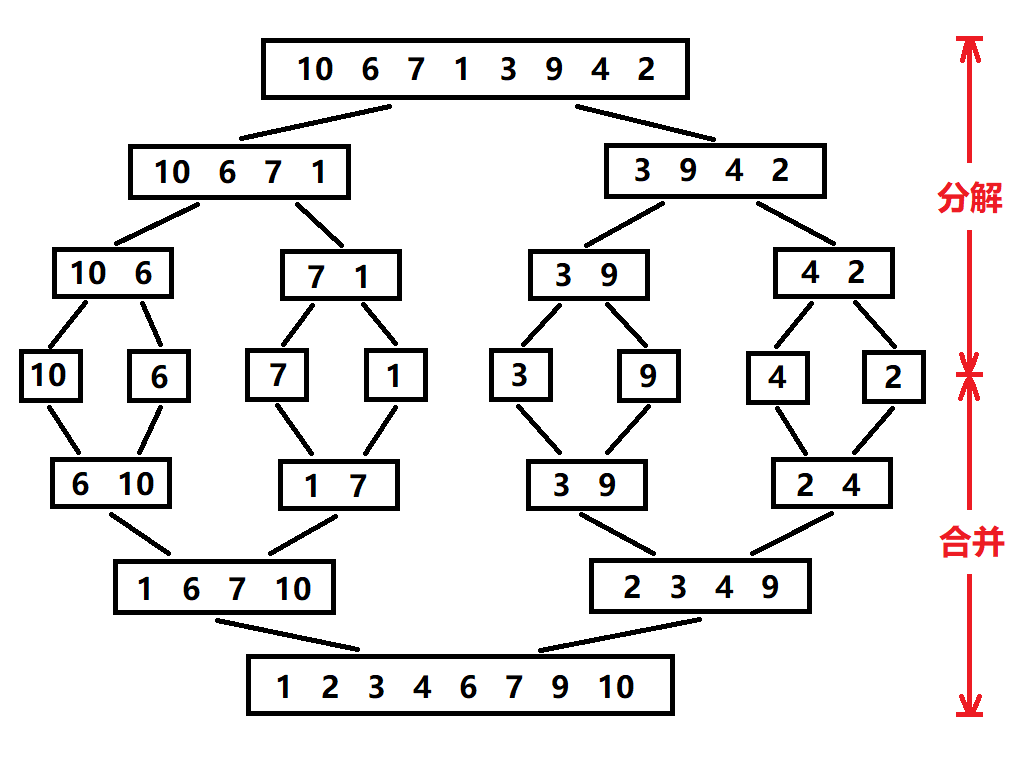
归并排序:分治思想的高效排序
目录 基本原理 流程图解 实现方法 递归实现 非递归实现 演示过程 时间复杂度 基本原理 归并排序(Merge Sort)是一种基于分治思想的排序算法,由约翰冯诺伊曼在1945年提出。其核心思想包括: 分割(Divide):将待排序数组递归地分成两个子…...

npm安装electron下载太慢,导致报错
npm安装electron下载太慢,导致报错 背景 想学习electron框架做个桌面应用,卡在了安装依赖(无语了)。。。一开始以为node版本或者npm版本太低问题,调整版本后还是报错。偶尔执行install命令后,可以开始下载…...