【python】OpenCV—Point Polygon Test

文章目录
- 1、完整代码
- 2、涉及到的库
- cv2.pointPolygonTest
- cv2.minMaxLoc
1、完整代码
from __future__ import print_function
from __future__ import division
import cv2 as cv
import numpy as np
# Create an image
r = 100
src = np.zeros((4*r, 4*r), dtype=np.uint8)
# 创建六边形的6个顶点
vert = [None]*6
vert[0] = (3*r//2, int(1.34*r))
vert[1] = (1*r, 2*r)
vert[2] = (3*r//2, int(2.866*r))
vert[3] = (5*r//2, int(2.866*r))
vert[4] = (3*r, 2*r)
vert[5] = (5*r//2, int(1.34*r))
# 根据六个顶点画6边形
for i in range(6):cv.line(src, vert[i], vert[(i+1)%6], ( 255 ), 3)
# 获取六边形的轮廓
contours, _ = cv.findContours(src, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)
# 计算图上点到六边形的距离(带符号)
raw_dist = np.empty(src.shape, dtype=np.float32)
for i in range(src.shape[0]):for j in range(src.shape[1]):raw_dist[i,j] = cv.pointPolygonTest(contours[0], (j,i), True)
# 查找带符号的最大最小值
minVal, maxVal, _, maxDistPt = cv.minMaxLoc(raw_dist)
minVal = abs(minVal)
maxVal = abs(maxVal)
# 用图形表示距离
drawing = np.zeros((src.shape[0], src.shape[1], 3), dtype=np.uint8)
for i in range(src.shape[0]):for j in range(src.shape[1]):if raw_dist[i,j] < 0:drawing[i,j,0] = 255 - abs(raw_dist[i,j]) * 255 / minValelif raw_dist[i,j] > 0:drawing[i,j,2] = 255 - raw_dist[i,j] * 255 / maxValelse:drawing[i,j,0] = 255drawing[i,j,1] = 255drawing[i,j,2] = 255
cv.circle(drawing,maxDistPt, int(maxVal),(255,255,255), 1, cv.LINE_8, 0)
cv.imshow('Source', src)
cv.imshow('Distance and inscribed circle', drawing)
cv.waitKey()


带符号的最大值,为六边形的中心,到六边形轮廓的距离最远
以此点位中心,画了个圆
六边形外的点,蓝色随着距离变大递减
六边形内的点,红色随着距离变大递减
六边形上的点,白色
2、涉及到的库
cv2.pointPolygonTest
用于判断一个点是否位于一个多边形内部、外部还是边上。这个函数在图像处理、计算机视觉和形状分析等领域中非常有用。以下是关于 cv2.pointPolygonTest() 函数的详细解析:
函数定义
cv2.pointPolygonTest(contour, pt, measureDist=False)
- contour:输入的多边形轮廓,通常是一个由点构成的数组(numpy数组),这些点定义了多边形的边界。这些点可以通过如 cv2.findContours 等函数从图像中提取。
- pt:需要检测的点,通常是一个包含 x 和 y 坐标的元组或 numpy.ndarray。
- measureDist:一个布尔值参数,指定是否计算点到多边形边界的最短距离。
1)如果为 True,则函数返回点到边界的带符号距离。当点在多边形内部时,距离为正;当点在多边形外部时,距离为负;当点在多边形边上时,距离为0。距离的绝对值表示点到多边形边界的实际最短距离。
2)如果为 False(默认值),则函数返回一个整数,表示点相对于多边形的位置。返回值为 -1 表示点在多边形外部,0 表示点在多边形边上,+1 表示点在多边形内部。
使用场景
- 形状分析:通过检测点是否在多边形内部,可以分析形状的属性和特征。
- 物体检测:在图像处理中,可以检测物体边界框内的点是否在多边形内部,从而判断物体是否被完全包含在多边形内。
- 图像分割:在图像分割任务中,可以使用该函数来判断像素点是否属于某个特定的区域或对象。
示例代码
import cv2
import numpy as np # 定义一个多边形的顶点
pts = np.array([[0, 0], [100, 0], [100, 100], [0, 100]], np.int32)
pts = pts.reshape((-1, 1, 2)) # 将点集转换为 (n, 1, 2) 的形状 # 待检测的点
pt_inside = (50, 50) # 多边形内部的一个点
pt_on_edge = (100, 0) # 多边形边上的一个点
pt_outside = (150, 50) # 多边形外部的一个点 # 调用 pointPolygonTest
dist_inside = cv2.pointPolygonTest(pts, pt_inside, measureDist=True)
dist_on_edge = cv2.pointPolygonTest(pts, pt_on_edge, measureDist=True)
dist_outside = cv2.pointPolygonTest(pts, pt_outside, measureDist=True) position_inside = cv2.pointPolygonTest(pts, pt_inside, measureDist=False)
position_on_edge = cv2.pointPolygonTest(pts, pt_on_edge, measureDist=False)
position_outside = cv2.pointPolygonTest(pts, pt_outside, measureDist=False) print(f"Inside distance: {dist_inside}")
print(f"On edge distance: {dist_on_edge}")
print(f"Outside distance: {dist_outside}") print(f"Inside position: {position_inside}")
print(f"On edge position: {position_on_edge}")
print(f"Outside position: {position_outside}")
output
Inside distance: 50.0
On edge distance: -0.0
Outside distance: -50.0
Inside position: 1.0
On edge position: 0.0
Outside position: -1.0
注意事项
-
确保传入的轮廓(contour)是正确的,即它应该是一个由点构成的数组,这些点定义了多边形的边界。
-
当 measureDist 为 True 时,返回的距离值是带符号的,正值表示点在多边形内部,负值表示在多边形外部,绝对值表示最短距离。
-
cv2.pointPolygonTest() 函数不会直接修改输入的图像或轮廓,它只是返回一个表示点位置的数值或距离。
cv2.minMaxLoc
用于寻找一维数值数组(例如,灰度图像的某一行或列)中的全局最小值和最大值,以及它们的位置。这个函数对于图像处理中的阈值设置、特征检测等场景非常有用。
cv2.minMaxLoc(src, mask=None)
-
src:输入的单通道数值数组。这可以是一个灰度图像,或者图像的某个部分(如一行或一列)。
-
mask:可选的与 src 同样大小和类型的操作掩码。如果提供了掩码,则函数仅在没有被掩码标记为忽略的元素中查找最小值和最大值。掩码中的非零值表示对应位置的元素需要考虑在内。
返回值
函数返回一个包含四个元素的元组 (minVal, maxVal, minLoc, maxLoc):
- minVal:找到的最小值。
- maxVal:找到的最大值。
- minLoc:最小值的坐标(以元组形式给出,如 (x, y))。注意,对于一维数组(如图像的单个行或列),坐标将是 (col, 0),因为 y 坐标在这种情况下没有意义。
- maxLoc:最大值的坐标(同样以元组形式给出)。
使用示例
import cv2
import numpy as np # 加载图像(转换为灰度,如果它还不是)
img = cv2.imread('path_to_image.jpg', cv2.IMREAD_GRAYSCALE) # 查找最小值和最大值以及它们的位置
minVal, maxVal, minLoc, maxLoc = cv2.minMaxLoc(img) print(f"Minimum value: {minVal}, at location: {minLoc}")
print(f"Maximum value: {maxVal}, at location: {maxLoc}")
如果你只对图像的某一行或列感兴趣,你可以先通过索引该行或列来创建一个一维数组,然后再调用 cv2.minMaxLoc。
注意:对于二维图像(如灰度图像),返回的坐标 (x, y) 是以图像的左上角为原点((0, 0))的坐标系统。但是,对于一维数组(如通过索引得到的行或列),y 坐标总是 0,因为此时我们实际上是在处理一维数据。
相关文章:
【python】OpenCV—Point Polygon Test
文章目录 1、完整代码2、涉及到的库cv2.pointPolygonTestcv2.minMaxLoc 1、完整代码 from __future__ import print_function from __future__ import division import cv2 as cv import numpy as np # Create an image r 100 src np.zeros((4*r, 4*r), dtypenp.uint8) # 创…...

6 Go语言的常量、枚举、作用域
本专栏将从基础开始,循序渐进,由浅入深讲解Go语言,希望大家都能够从中有所收获,也请大家多多支持。 查看相关资料与知识库 专栏地址:Go专栏 如果文章知识点有错误的地方,请指正!大家一起学习,…...

第十一章 数据结构
第十一章 数据结构 11.1 数组 数组是元素的顺序集合,通常这些元素具有相同的数据类型 索引表示元素在数组中的顺序号,顺序号从数组开始处计数 数组元素通过索引被独立给出了地址,数组整体上有一个名称,但每个元素利用数组的的…...

LeetCode704 二分查找
前言 题目: 704.二分查找 文档: 代码随想录——二分查找 编程语言: C 解题状态: 解答错误,变量定义位置错误。 思路 有序数组的查找,最直接的思路应该就是二分查找。但是在查找的过程中要考虑到区间的边界…...

[言简意赅] Matlab生成FPGA端rom初始化文件.coe
🎎Matlab生成FPGA端rom初始化文件.coe 本文主打言简意赅。 函数源码 function gencoeInitialROM(width, depth, signal, filepath)% gencoeInitialROM - 生成 Xilinx ROM 初始化格式的 COE 文件%% 输入参数:% width - ROM 数据位宽% depth - ROM 数据深度% s…...

【QAC】分布式部署下其他机器如何连接RLM
1、 文档目标 解决分布式部署下其他机器如何连接RLMLicense管理器。 2、 问题场景 分布式部署下QAC要在其他机器上单独运行扫描,必须先连接RLMLicense管理器,如何连接? 3、软硬件环境 1、软件版本:HelixQAC23.04 2、机器环境…...

从等保测评看行业安全趋势:洞察与预测
在当今数字化时代,网络安全已成为各行各业的头等大事。等保测评(等级保护测评),作为国家对信息系统安全的重要管理手段,不仅关乎企业的合规性,更是行业安全水平的重要衡量标准。本文将从等保测评的视角出发…...

HTTP模块(二)
HTTP 设置 HTTP 响应报文 HTTP报文常见属性: const http require(http);const server http.createServer((request, response) > {// 设置请求状态码 2xx 4xx 5xxresponse.statusCode 200;// 设置请求描述 了解即可response.statusMessage hello// 指定响…...

引入缓存带来的问题以及解决方案
目录 前言 问题与解决方案 缓存击穿 缓存穿透 缓存雪崩 缓存一致性 前言 在提升接口性能的方案中,毫无疑问,使用缓存是最有效果的,但同时也会带来新的问题。 缓存击穿缓存穿透缓存雪崩缓存一致性 以上问题都是引入缓存需要考虑的&am…...

力扣39题:组合总和的 Java 实现
引言 力扣(LeetCode)是一个在线编程平台,提供了大量的编程题目供开发者练习。第39题“组合总和”是一个经典的回溯算法问题,要求找出所有可能的组合,使得组合中的数字之和等于给定的目标值。本文将介绍如何使用 Java …...

使用el-table实现自动滚动
文章目录 概要技术实现完整代码 概要 在前端开发大屏的时候,我们会用到表格数据展示,有时候为了使用户体验更加好,会增加表格自动滚动。下边我将以示例代码,用element UI的el-table来讲一下。 技术实现 1 .增加dom监听…...

Angular由一个bug说起之八:实践中遇到的一个数据颗粒度的问题
互联网产品离不开数据处理,数据处理有一些基本的原则包括:准确性、完整性、一致性、保密性、及时性。 准确性:是数据处理的首要目标,确保数据的真实性和可靠性。准确的数据是进行分析和决策的基础,因此…...

day13(DNS域名解析)
今天内容: 1、逆向解析 2、多域名 3、时间服务器 4、主从配置 1.设置逆向解析 (1)永久配置我们自己的DNS服务器 (2)关闭NetworkManager服务 NetworkManager 的自动管理功能可能会干扰定制化的网络配置。 在需要切换…...

uboot的mmc partconf命令
文章目录 命令格式参数解释具体命令解释总结 mmc partconf 是一个用于配置 MMC (MultiMediaCard) 分区的 U-Boot 命令。具体来说,这个命令允许你设置或读取 MMC 卡的分区配置参数。让我们详细解释一下 mmc partconf 0 0 1 0 命令的含义。 命令格式 mmc partconf &…...

数据结构经典测题3
1. 设有定义: char *p; ,以下选项中不能正确将字符串赋值给字符型指针 p 的语句是【多选】( ) A: pgetchar(); B: scanf("%s",p); C: char s[]"china"; ps; D: *p"china"; 答案为ABD A选项&…...
 停止自动为尖括号标记添加配对的结束括号</>)
tensorboard add_text() 停止自动为尖括号标记添加配对的结束括号</>
问题 调用tensorboard的add_text()记录文本信息时,如果文本中含有含尖括号的标记,就会被自动识别为html标记,因此tensorboard会自动生成对应的带斜杠的结束标记。 例如要记录的文本是 abc<abc>,在tensorboard中就会显示为a…...

sql-libs通关详解
1-4关 1.第一关 我们输入?id1 看回显,通过回显来判断是否存在注入,以及用什么方式进行注入,直接上图 可以根据结果指定是字符型且存在sql注入漏洞。因为该页面存在回显,所以我们可以使用联合查询。联合查询原理简单说一下&…...

【STM32】当按键具有上拉电阻时GPIO应该配置什么模式?怎么用按键去控制LED翻转?
当按键具有上拉电阻时,可以通过正确配置STM32的GPIO端口和编写相应的控制代码来实现按键控制LED灯的功能。具体来说,需要配置按键所连接的GPIO端口为输入模式,并启用内部上拉电阻,这样在按键未操作时该端口保持高电平状态…...

EXO-chatgpt_api 解释
目录 chatgpt_api 解释 resolve_tinygrad_tokenizer 函数 resolve_tokenizer 函数 调试和日志记录 参数 返回值 初始化方法 __init__ 异步方法 注意事项 chatgpt_api 解释 展示了如何在一个项目中组织和导入各种库、模块和类,以及如何进行一些基本的We…...

新能源汽车的充电网络安全威胁和防护措施
1. 物理攻击:例如恶意破坏、搬走充电设施等,这可能会对充电设施造成损害,妨碍正常的电力传输。 2. 网络攻击: 黑客可能利用系统漏洞攻击网络,破坏设备,并窃取用户的个人信息、支付信息等; 车辆…...
eNSP-Cloud(实现本地电脑与eNSP内设备之间通信)
说明: 想象一下,你正在用eNSP搭建一个虚拟的网络世界,里面有虚拟的路由器、交换机、电脑(PC)等等。这些设备都在你的电脑里面“运行”,它们之间可以互相通信,就像一个封闭的小王国。 但是&#…...

DeepSeek 赋能智慧能源:微电网优化调度的智能革新路径
目录 一、智慧能源微电网优化调度概述1.1 智慧能源微电网概念1.2 优化调度的重要性1.3 目前面临的挑战 二、DeepSeek 技术探秘2.1 DeepSeek 技术原理2.2 DeepSeek 独特优势2.3 DeepSeek 在 AI 领域地位 三、DeepSeek 在微电网优化调度中的应用剖析3.1 数据处理与分析3.2 预测与…...
)
rknn优化教程(二)
文章目录 1. 前述2. 三方库的封装2.1 xrepo中的库2.2 xrepo之外的库2.2.1 opencv2.2.2 rknnrt2.2.3 spdlog 3. rknn_engine库 1. 前述 OK,开始写第二篇的内容了。这篇博客主要能写一下: 如何给一些三方库按照xmake方式进行封装,供调用如何按…...

day52 ResNet18 CBAM
在深度学习的旅程中,我们不断探索如何提升模型的性能。今天,我将分享我在 ResNet18 模型中插入 CBAM(Convolutional Block Attention Module)模块,并采用分阶段微调策略的实践过程。通过这个过程,我不仅提升…...

QMC5883L的驱动
简介 本篇文章的代码已经上传到了github上面,开源代码 作为一个电子罗盘模块,我们可以通过I2C从中获取偏航角yaw,相对于六轴陀螺仪的yaw,qmc5883l几乎不会零飘并且成本较低。 参考资料 QMC5883L磁场传感器驱动 QMC5883L磁力计…...

服务器硬防的应用场景都有哪些?
服务器硬防是指一种通过硬件设备层面的安全措施来防御服务器系统受到网络攻击的方式,避免服务器受到各种恶意攻击和网络威胁,那么,服务器硬防通常都会应用在哪些场景当中呢? 硬防服务器中一般会配备入侵检测系统和预防系统&#x…...

Java多线程实现之Thread类深度解析
Java多线程实现之Thread类深度解析 一、多线程基础概念1.1 什么是线程1.2 多线程的优势1.3 Java多线程模型 二、Thread类的基本结构与构造函数2.1 Thread类的继承关系2.2 构造函数 三、创建和启动线程3.1 继承Thread类创建线程3.2 实现Runnable接口创建线程 四、Thread类的核心…...

iview框架主题色的应用
1.下载 less要使用3.0.0以下的版本 npm install less2.7.3 npm install less-loader4.0.52./src/config/theme.js文件 module.exports {yellow: {theme-color: #FDCE04},blue: {theme-color: #547CE7} }在sass中使用theme配置的颜色主题,无需引入,直接可…...
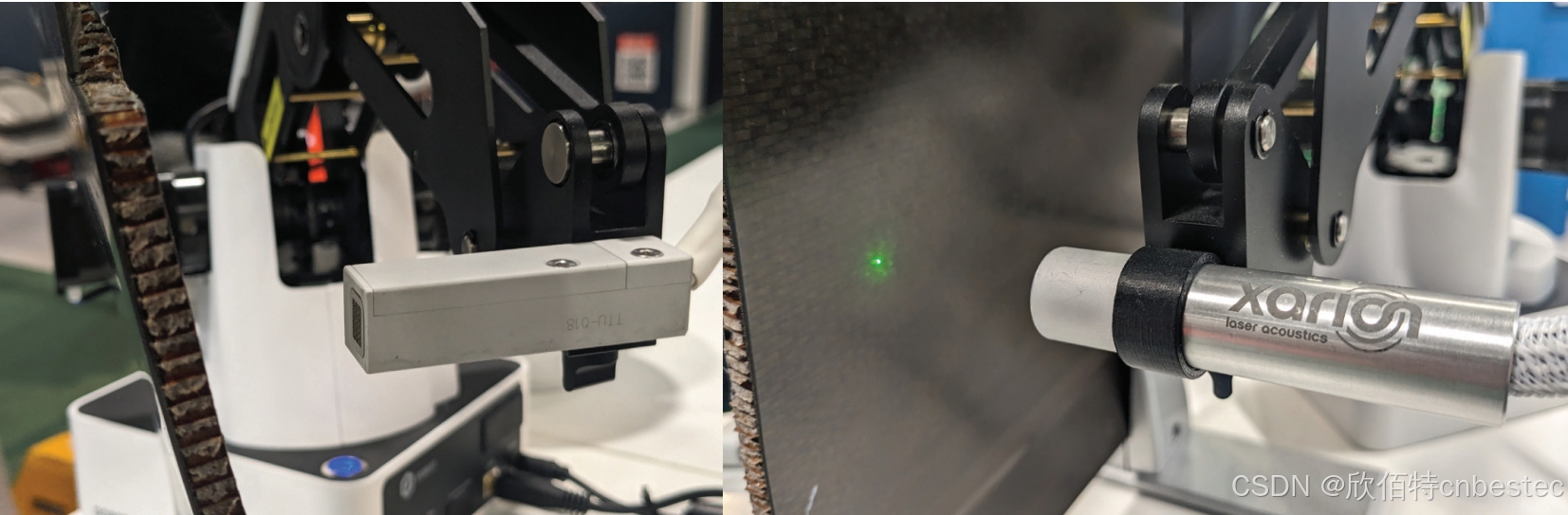
解析奥地利 XARION激光超声检测系统:无膜光学麦克风 + 无耦合剂的技术协同优势及多元应用
在工业制造领域,无损检测(NDT)的精度与效率直接影响产品质量与生产安全。奥地利 XARION开发的激光超声精密检测系统,以非接触式光学麦克风技术为核心,打破传统检测瓶颈,为半导体、航空航天、汽车制造等行业提供了高灵敏…...
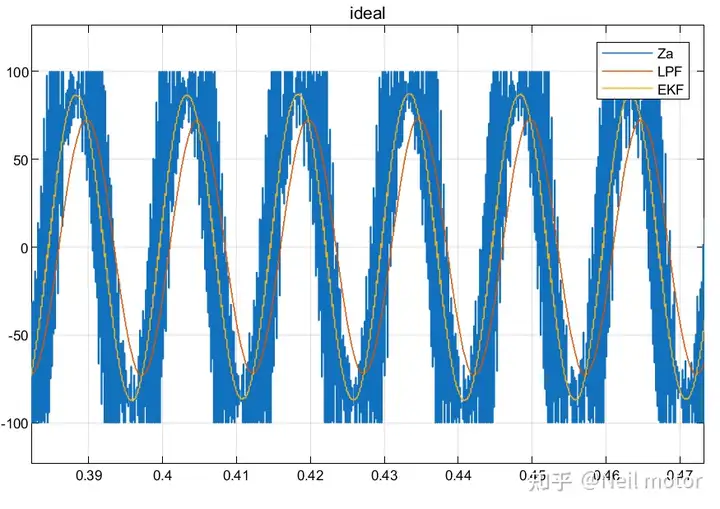
永磁同步电机无速度算法--基于卡尔曼滤波器的滑模观测器
一、原理介绍 传统滑模观测器采用如下结构: 传统SMO中LPF会带来相位延迟和幅值衰减,并且需要额外的相位补偿。 采用扩展卡尔曼滤波器代替常用低通滤波器(LPF),可以去除高次谐波,并且不用相位补偿就可以获得一个误差较小的转子位…...