rk3588s 定制版 USB adb , USB2.0与USB3.0 区别,adb 由typeC 转换到USB3.0(第二部分)
硬件资源: rk3588s 核心板+定制的地板
软件资源: 网盘上的 android12 源码
1 硬件上
客户只想使用 type c 接口中的 usb2.0 OTG 。在硬件上,甚至连 CC芯片都没有连接。

关于一些前置的知识。
1 USB2.0 与 USB3.0 的区别。


usb3.0 兼容2.0 不就是相当于 无脑 include 吗。

2 adb 如何转换到 USB3.0 的接口。
这个资源网上已经有人发了,是3399 的,但是我们有验证过,不知道真的假的,假设是正确的。
我就完全 粘贴过来,方便以后参考。

这里 他的 typec0 与 typec1 使用的都是 2lane 的usb3.0 ,不知道,座子是typec的还是USB3.0 的。
互换了 otg 与 host.


然后就 涉及到了, 修改源码,这些我就看不懂了。
直接粘贴过来。
------------------------------------------------------------------------------------------------------------------------
diff --git a/kernel/include/linux/phy/phy.h b/kernel/include/linux/phy/phy.h
index a3965c3..c0daa66 100644
--- a/kernel/include/linux/phy/phy.h
+++ b/kernel/include/linux/phy/phy.h
@@ -36,6 +36,7 @@ enum phy_mode {
* @power_on: powering on the phy
* @power_off: powering off the phy
* @set_mode: set the mode of the phy
+ * @set_vbusdet: usb disconnect of the phy
* @reset: resetting the phy
* @cp_test: prepare for the phy compliance test
* @owner: the module owner containing the ops
@@ -46,6 +47,7 @@ struct phy_ops {
int (*power_on)(struct phy *phy);
int (*power_off)(struct phy *phy);
int (*set_mode)(struct phy *phy, enum phy_mode mode);
+ int (*set_vbusdet)(struct phy *phy, bool level);
int (*reset)(struct phy *phy);
int (*cp_test)(struct phy *phy);
struct module *owner;
@@ -133,6 +135,7 @@ int phy_exit(struct phy *phy);
int phy_power_on(struct phy *phy);
int phy_power_off(struct phy *phy);
int phy_set_mode(struct phy *phy, enum phy_mode mode);
+int phy_set_vbusdet(struct phy *phy, bool level);
int phy_reset(struct phy *phy);
int phy_cp_test(struct phy *phy);
static inline int phy_get_bus_width(struct phy *phy)
@@ -247,6 +250,13 @@ static inline int phy_set_mode(struct phy *phy, enum phy_mode mode)
return -ENOSYS;
}
+static inline int phy_set_vbusdet(struct phy *phy, bool level)
+{
+ if (!phy)
+ return 0;
+ return -ENOSYS;
+}
+
static inline int phy_reset(struct phy *phy)
{
if (!phy)
---------------------------------------------------------------------------------------------------------------------------------
diff --git a/kernel/drivers/phy/rockchip/phy-rockchip-inno-usb2.c b/kernel/drivers/phy/rockchip/phy-rockchip-inno-usb2.c
index 66fb407..1f11ae1 100644
--- a/kernel/drivers/phy/rockchip/phy-rockchip-inno-usb2.c
+++ b/kernel/drivers/phy/rockchip/phy-rockchip-inno-usb2.c
@@ -37,6 +37,8 @@
#include <linux/usb/of.h>
#include <linux/usb/otg.h>
#include <linux/wakelock.h>
+#include <linux/gpio.h>
+#include <linux/of_gpio.h>
#define BIT_WRITEABLE_SHIFT 16
#define SCHEDULE_DELAY (60 * HZ)
@@ -250,6 +252,7 @@ struct rockchip_usb2phy_port {
struct delayed_work chg_work;
struct delayed_work otg_sm_work;
struct delayed_work sm_work;
+ struct delayed_work peripheral_work;
struct regulator *vbus;
const struct rockchip_usb2phy_port_cfg *port_cfg;
struct notifier_block event_nb;
@@ -816,12 +819,37 @@ static int rockchip_usb2phy_set_mode(struct phy *phy, enum phy_mode mode)
return ret;
}
+static int rockchip_usb2phy_set_vbusdet(struct phy *phy, bool level)
+{
+ struct rockchip_usb2phy_port *rport = phy_get_drvdata(phy);
+ struct rockchip_usb2phy *rphy = dev_get_drvdata(phy->dev.parent);
+ int ret = 0;
+
+ if (rport->port_id != USB2PHY_PORT_OTG)
+ return ret;
+
+ if (rphy->phy_cfg->reg == 0xe460) {
+ if (level)
+ {
+ ret = regmap_write(rphy->grf, 0x4518, GENMASK(20, 20) | 0x10);
+ }
+ else
+ {
+ ret = regmap_write(rphy->grf, 0x4518, GENMASK(20, 20) | 0x00);
+ }
+ }
+
+ return ret;
+}
+
+
static const struct phy_ops rockchip_usb2phy_ops = {
.init = rockchip_usb2phy_init,
.exit = rockchip_usb2phy_exit,
.power_on = rockchip_usb2phy_power_on,
.power_off = rockchip_usb2phy_power_off,
.set_mode = rockchip_usb2phy_set_mode,
+ .set_vbusdet = rockchip_usb2phy_set_vbusdet,
.owner = THIS_MODULE,
};
@@ -1530,13 +1558,24 @@ static int rockchip_otg_event(struct notifier_block *nb,
return NOTIFY_DONE;
}
+static void rockchip_usb2phy_peripheral_work(struct work_struct *work)
+{
+ struct rockchip_usb2phy_port *rport =
+ container_of(work, struct rockchip_usb2phy_port, peripheral_work.work);
+ struct rockchip_usb2phy *rphy = dev_get_drvdata(rport->phy->dev.parent);
+ extcon_set_state(rphy->edev, EXTCON_USB, true);
+ extcon_sync(rphy->edev, EXTCON_USB);
+ schedule_delayed_work(&rport->peripheral_work, 3 * HZ);
+
+}
+
static int rockchip_usb2phy_otg_port_init(struct rockchip_usb2phy *rphy,
struct rockchip_usb2phy_port *rport,
struct device_node *child_np)
{
int ret;
int iddig;
-
+ int gpio_vbus_5v;
rport->port_id = USB2PHY_PORT_OTG;
rport->port_cfg = &rphy->phy_cfg->port_cfgs[USB2PHY_PORT_OTG];
rport->state = OTG_STATE_UNDEFINED;
@@ -1584,6 +1623,32 @@ static int rockchip_usb2phy_otg_port_init(struct rockchip_usb2phy *rphy,
rport->vbus = NULL;
}
+
+
+ rport->vbus_always_on =
+ of_property_read_bool(child_np, "rockchip,vbus-always-on");
+ if (rport->vbus_always_on)
+ {
+ ret = of_get_named_gpio_flags(child_np, "vbus-5v-gpios", 0, NULL);
+ if (ret < 0) {
+ printk("%s() Can not read property vbus-5v-gpio\n", __FUNCTION__);
+ } else {
+ gpio_vbus_5v = ret;
+ ret = devm_gpio_request(rphy->dev, gpio_vbus_5v, "vbus-gpio");
+ if(ret < 0)
+ printk("%s() devm_gpio_request vbus-gpio request ERROR\n", __FUNCTION__);
+ ret = gpio_direction_output(gpio_vbus_5v,1);
+ if(ret < 0)
+ printk("%s() gpio_direction_output vbus-gpio set ERROR\n", __FUNCTION__);
+ }
+
+ INIT_DELAYED_WORK(&rport->peripheral_work, rockchip_usb2phy_peripheral_work);
+ schedule_delayed_work(&rport->peripheral_work, 3 * HZ);
+
+ goto out;
+ }
+
+
rport->mode = of_usb_get_dr_mode_by_phy(child_np, -1);
if (rport->mode == USB_DR_MODE_HOST ||
rport->mode == USB_DR_MODE_UNKNOWN) {
@@ -1600,9 +1665,6 @@ static int rockchip_usb2phy_otg_port_init(struct rockchip_usb2phy *rphy,
goto out;
}
- if (rport->vbus_always_on)
- goto out;
-
wake_lock_init(&rport->wakelock, WAKE_LOCK_SUSPEND, "rockchip_otg");
INIT_DELAYED_WORK(&rport->bypass_uart_work,
rockchip_usb_bypass_uart_work);
------------------------------------------------------------------------------------------------------------------------
diff --git a/kernel/drivers/phy/phy-core.c b/kernel/drivers/phy/phy-core.c
index 0587933..8dd548b 100644
--- a/kernel/drivers/phy/phy-core.c
+++ b/kernel/drivers/phy/phy-core.c
@@ -387,6 +387,21 @@ int phy_cp_test(struct phy *phy)
}
EXPORT_SYMBOL_GPL(phy_cp_test);
+int phy_set_vbusdet(struct phy *phy, bool level)
+{
+ int ret;
+
+ if (!phy || !phy->ops->set_vbusdet)
+ return 0;
+
+ mutex_lock(&phy->mutex);
+ ret = phy->ops->set_vbusdet(phy, level);
+ mutex_unlock(&phy->mutex);
+
+ return ret;
+}
+EXPORT_SYMBOL_GPL(phy_set_vbusdet);
+
/**
* _of_phy_get() - lookup and obtain a reference to a phy by phandle
* @np: device_node for which to get the phy
------------------------------------------------------------------------------------------------------------------------------
diff --git a/kernel/drivers/usb/dwc3/dwc3-rockchip.c b/kernel/drivers/usb/dwc3/dwc3-rockchip.c
index 539b89a..7cf9675 100644
--- a/kernel/drivers/usb/dwc3/dwc3-rockchip.c
+++ b/kernel/drivers/usb/dwc3/dwc3-rockchip.c
@@ -24,6 +24,7 @@
#include <linux/dma-mapping.h>
#include <linux/clk.h>
#include <linux/clk-provider.h>
+#include <linux/debugfs.h>
#include <linux/of.h>
#include <linux/of_platform.h>
#include <linux/pm_runtime.h>
@@ -31,6 +32,7 @@
#include <linux/freezer.h>
#include <linux/iopoll.h>
#include <linux/reset.h>
+#include <linux/uaccess.h>
#include <linux/usb.h>
#include <linux/usb/hcd.h>
#include <linux/usb/ch9.h>
@@ -47,6 +49,7 @@
struct dwc3_rockchip {
int num_clocks;
bool connected;
+ bool disconnect;
bool skip_suspend;
bool suspended;
bool force_mode;
@@ -56,6 +59,7 @@ struct dwc3_rockchip {
struct device *dev;
struct clk **clks;
struct dwc3 *dwc;
+ struct dentry *root;
struct reset_control *otg_rst;
struct extcon_dev *edev;
struct usb_hcd *hcd;
@@ -96,6 +100,7 @@ static ssize_t dwc3_mode_store(struct device *device,
struct dwc3_rockchip *rockchip = dev_get_drvdata(device);
struct dwc3 *dwc = rockchip->dwc;
enum usb_dr_mode new_dr_mode;
+ //char buf[32];
if (!rockchip->original_dr_mode)
rockchip->original_dr_mode = dwc->dr_mode;
@@ -107,15 +112,21 @@ static ssize_t dwc3_mode_store(struct device *device,
if (!strncmp(buf, "0", 1) || !strncmp(buf, "otg", 3)) {
new_dr_mode = USB_DR_MODE_OTG;
+ phy_set_vbusdet(dwc->usb2_generic_phy, 0);
} else if (!strncmp(buf, "1", 1) || !strncmp(buf, "host", 4)) {
new_dr_mode = USB_DR_MODE_HOST;
+ phy_set_vbusdet(dwc->usb2_generic_phy, 0);
} else if (!strncmp(buf, "2", 1) || !strncmp(buf, "peripheral", 10)) {
new_dr_mode = USB_DR_MODE_PERIPHERAL;
+ phy_set_vbusdet(dwc->usb2_generic_phy, 1);
} else {
dev_info(rockchip->dev, "illegal dr_mode\n");
+ phy_set_vbusdet(dwc->usb2_generic_phy, 0);
return count;
}
+ msleep(200);
+
if (dwc->dr_mode == new_dr_mode) {
dev_info(rockchip->dev, "Same with current dr_mode\n");
return count;
@@ -378,6 +389,17 @@ static void dwc3_rockchip_otg_extcon_evt_work(struct work_struct *work)
mutex_lock(&rockchip->lock);
+ if (extcon_get_cable_state_(edev, EXTCON_USB)) {
+ if ((dwc->link_state == DWC3_LINK_STATE_U3) && !rockchip->disconnect) {
+ phy_set_vbusdet(dwc->usb2_generic_phy, 0);
+ msleep(3000);
+ phy_set_vbusdet(dwc->usb2_generic_phy, 1);
+ rockchip->disconnect = true;
+ } else if(dwc->link_state == DWC3_LINK_STATE_U0) {
+ rockchip->disconnect = false;
+ }
+ }
+
if (rockchip->force_mode ? dwc->dr_mode == USB_DR_MODE_PERIPHERAL :
extcon_get_cable_state_(edev, EXTCON_USB)) {
if (rockchip->connected)
@@ -624,6 +646,7 @@ out:
static int dwc3_rockchip_get_extcon_dev(struct dwc3_rockchip *rockchip)
{
+ //int ret;
struct device *dev = rockchip->dev;
struct extcon_dev *edev;
@@ -743,6 +766,7 @@ static int dwc3_rockchip_probe(struct platform_device *pdev)
struct device *dev = &pdev->dev;
struct device_node *np = dev->of_node, *child;
struct platform_device *child_pdev;
+ //struct usb_hcd *hcd = NULL;
unsigned int count;
int ret;
----------------------------------------------------------------------------------------------------------------------------

那么是不是说,我自己在3588s上, 我改过了 typec0 之后 还需要在 android 系统启动之后,再做些设置呢。
感觉很像,我改过 typec 0 之后, android得打印信息可能与这个有关。
3 adb 的时候,是主设备还是从设备。
是做为从设备。
4 adb 使用的是 usb3.0 还是usb2.0

这是不是说,在adb 的时候,既可以使用 3.0 , 也可以使用 2.0 ,是自动适应的。
2 软件上的修改。
我参考的是 3588的 地板的设计, 在3588上 USB3.0 有这种设计。
3588底板原理图如下:

3588 核心板的原理图如下。
我参考一下typeC0 的引脚。

然后来看一下 TYPEC 1 的引脚。


所以 我觉得 3588 在软件上应该也是 有相应的设置的。
题外话,这里看一个 关于 typec 与 dp的关系的配置。
3588 核心板上的这几个图说的很明白了。




我去参考一下。

对于 typec1 的配置,就有这些,因为在硬件上 把它作为一个 USB3.0+USB2.0 使用了。只是 HOSt。

但是 type c 0 的配置就有很多。


所以 在软件上 我只要 在3588S的设备数中 ,去掉 typec0 的CC芯片的配置+dwc3_0 中,配置成 HOSt模式,应该在客户的底板上也是可以接上 USB的。
接下来就是我对 3588s的设备数的配置。



编译 + 烧写,之后测试。
发现 接上 USB+鼠标都是正常的。
但是有一些不必要的打印信息:





这些个报错的原因难道说还要 在android 文件系统上做些适配吗?
当然这些报错是不影响使用的。
但是看着不好看。
目前还是可以进一步去调试的,目前 typeC 的usb2.0 作为主设备是没有问题了,但是能不能 作为一个OTG设备呢?
3 我自己的实际的测试。
-------------------------------------------------------------------------------------------------------------------------
问题: 我现在 发现 在 3588S的设备数中有一个 gpio 我控制不了。
最原始的状态。

但是实际测试 这个GPIO 是可以 用的。

总结: 也最是, 他们只配置了 gpio 子系统,没有配置 pinctrl 子系统,但是是可以用的。

我自己的问题:
如果我把 GPIO4_A5 ,换成 GPIO4_A7 的话,然后在设备数中 改了 gpio+pinctrl 的话,烧写+编译测量发现, 这个脚是没有点评的。
然后又把设备数改回去,发现一个现象。
就是,板卡只有 在插上 typec 的时候,这个脚才会有 到电平,如果不插 type c 的话, 这个脚 , 是没有高电平的。
这就是说, 这个脚 只有在检测到 插拔之后,才会由驱动 去配置 高低电平。
我知道 3588 usb3.0 是通过 typec 转换过来的, 我去对比一下 两者的设备树的区别。

电源节点是这样的。

typec 的节点是这样的。
cc芯片引用了, typec 的电源节点。

电源节点是这样的。

总结一下: 在3588 中, usb3.0 与typec 的电源节点是两个节点。并且是单独引用的。
再来看看 我的 3588S的设备数的逻辑。


可以看到也是 在CC芯片中 引用了这个电源节点,所以我之前一直配置的 gpio的配置会失效。
那么我需要在 phy 的配置中重新引入这个节点。
我的疑问: usb 适配器的驱动是如何控制 电源驱动的呢,按理说,调用了驱动就应该自动把gpio拉高的。,先不管这个问题。
资源 : 在瑞芯微的文档里 , 是有关于这个问题的说明的。

接下来我 继续去修改设备树。
首先就是去掉 关于 CC芯片的内容。




然后是 添加相关的内容。
首先是 GPIO的添加。
这里我先不改。
然后是 phy 节点的更改。

然后是关于 dwc节点的更改。

相关文章:
rk3588s 定制版 USB adb , USB2.0与USB3.0 区别,adb 由typeC 转换到USB3.0(第二部分)
硬件资源: rk3588s 核心板定制的地板 软件资源: 网盘上的 android12 源码 1 硬件上 客户只想使用 type c 接口中的 usb2.0 OTG 。在硬件上,甚至连 CC芯片都没有连接。 关于一些前置的知识。 1 USB2.0 与 USB3.0 的区别。 usb3.0 兼容2.0 …...
Cookie与Session 实现登录操作
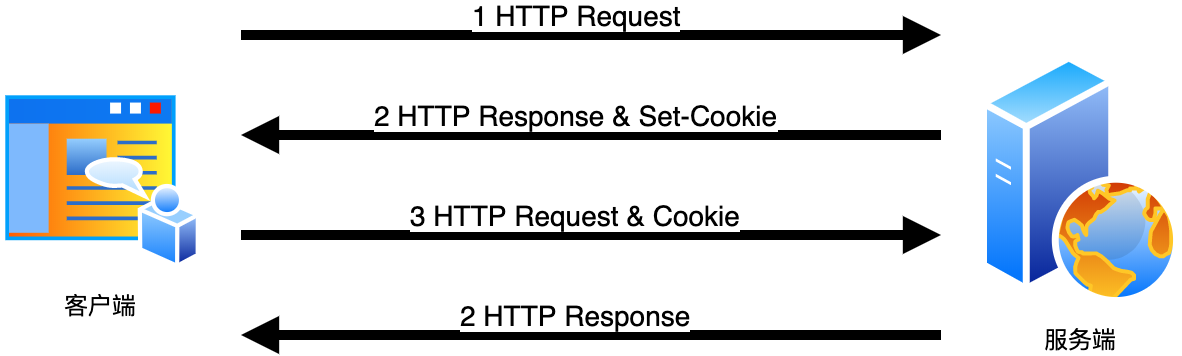
Cookie Cookie 是网络编程中使用最广泛的一项技术,主要用于辨识用户身份。 客户端(浏览器)与网站服务端通讯的过程如下图所示: 从图中看,服务端既要返回 Cookie 给客户端,也要读取客户端提交的 Cookie。所…...

通过IEC104转MQTT网关轻松接入阿里云平台
随着智能电网和物联网技术的飞速发展,电力系统中的传统IEC 104协议设备正面临向现代化、智能化转型的迫切需求。阿里云作为全球领先的云计算服务提供商,其强大的物联网平台为IEC 104设备的接入与数据处理提供了强大的支持。本文将深入探讨钡铼网关在MQTT…...
lua 游戏架构 之 游戏 AI (五)ai_autofight_find_way
这段Lua脚本定义了一个名为 ai_autofight_find_way 的类,继承自 ai_base 类。 lua 游戏架构 之 游戏 AI (一)ai_base-CSDN博客文章浏览阅读238次。定义了一套接口和属性,可以基于这个基础类派生出具有特定行为的AI组件。例如&…...

vue3+openLayers点击标记事件
<template><!--地图--><div class"distributeMap" id"distributeMap"></div> </template> <script lang"ts" setup> import { onMounted, reactive } from "vue"; import { Feature, Map, View }…...

深入分析 Android ContentProvider (三)
文章目录 深入分析 Android ContentProvider (三)ContentProvider 的高级使用和性能优化1. 高级使用场景1.1. 数据分页加载示例:分页加载 1.2. 使用 Loader 实现异步加载示例:使用 CursorLoader 加载数据 1.3. ContentProvider 与权限管理示例࿱…...

养宠浮毛异味双困扰?性价比高的宠物空气净化器推荐
家里养了两只银渐层,谁懂啊!一下班打开家门就看到家里飘满了猫浮毛雪,空气中还传来隐隐约约的异味。每天不是在吸毛的路上,就是在洗猫砂盆的路上,而且空气中的浮毛还很难清理干净,这是最让人头疼的问题。 …...

maven项目容器化运行之3-优雅的利用Jenkins和maven使用docker插件调用远程docker构建服务并在1Panel中运行
一.背景 在《maven项目容器化运行之1》中,我们开启了1Panel环境中docker构建服务给到了局域网。在《maven项目容器化运行之2》中,我们基本实现了maven工程创建、远程调用docker构建镜像、在1Panel选择镜像运行容器三大步骤。 但是,存在一个问…...

docker 打包orbbec
docker pull humble容器 sudo docker run -it osrf/ros:humble-desktop docker 启动容器 sudo docker run -u root --device/dev/bus/usb:/dev/bus/usb -it -v /home/wl:/share --name wl4 osrf/ros:humble-desktop /bin/bash新开一个终端 查看本地存在的容器:…...
无涯·问知财报解读,辅助更加明智的决策
财报解读就像是给公司做一次全面的体检,是理解公司内部运作机制和市场表现的一把钥匙,能够有效帮助投资者、分析师、管理层以及所有市场参与者判断一家公司的健康程度和发展潜力。 星环科技无涯问知的财经库内置了企业年报及财经类信息,并对…...

【Apache Doris】数据副本问题排查指南
【Apache Doris】数据副本问题排查指南 一、问题现象二、问题定位三、问题处理 本文主要分享Doris中数据副本异常的问题现象、问题定位以及如何处理此类问题。 一、问题现象 问题日志 查询报错 Failed to initialize storage reader, tablet{tablet_id}.xxx.xxx问题说明 查…...

【HarmonyOS】关于鸿蒙消息推送的心得体会(二)
【HarmonyOS】关于鸿蒙消息推送的心得体会(二) 前言 推送功能的开发与传统功能开发还是有很大区别。首先最大的区别点就在于需要多部门之间的协同,作为鸿蒙客户端开发,你需要和产品,运营,以及后台开发一起…...

零基础入门:创建一个简单的Python爬虫管理系统
摘要: 本文将手把手教你,从零开始构建一个简易的Python爬虫管理系统,无需编程基础,轻松掌握数据抓取技巧。通过实战演练,你将学会设置项目、编写基本爬虫代码、管理爬取任务与数据,为个人研究或企业需求奠…...

【Node.js基础04】node.js模块化
一:什么是模块化 在Node.js中,每个文件都可视为一个独立的模块。模块化提高了代码的复用性,按需加载,具有独立的作用域 二:如何实现多个文件间导入和导出 1 CommonJS标准(默认)-导入和导出 …...

数据库——单表查询
一、建立数据库mydb8_worker mysql> use mydb8_worker; 二、建立表 1.创建表 mysql> create table t_worker(department_id int(11) not null comment 部门号,-> worder_id int(11) primary key not null comment 职工号,-> worker_date date not null comment…...
dsa加训
refs: OI Wiki - OI Wiki (oi-wiki.org) 1. 枚举 POJ 2811 熄灯问题 refs : OpenJudge - 2811:熄灯问题 如果要枚举每个灯开或者不开的情况,总计2^30种情况,显然T。 不过我们可以发现:若第i行的某个灯亮了,那么有且仅有第i行和第…...

SpringBoot源码(1)ApplicationContext和BeanFactory
1、调用getBean方法 SpringBootApplication public class SpringBootDemoApplication {public static void main(String[] args) {ConfigurableApplicationContext applicationContext SpringApplication.run(SpringBootDemoApplication.class, args);applicationContext.get…...

CANoe编程实例--TCP/IP通信
1、简介 本实例将使用目前常用的开发工具C#来开发服务器端,以CANoe端作为客户端。服务器端和客户端,通过TCP/IP连接,实现数据交换。 首先在服务器端建立一个监听Socket,自动创建一个监听线程,随时监听是否有客户端的连…...

Neuron协议网关的北向应用插件开发
目录 概述 指令处理层开发 应用层开发 .open .close .init .uninit .start .stop .setting .request 插件设置文件 适配华为的思路 概述 最近研究了一段时间的Neuron协议网关,前面的博文也提到它虽然能够把数据发到华为的IoT平台上…...

【BUG】已解决:You are using pip version 10.0.1, however version 21.3.1 is available.
You are using pip version 10.0.1, however version 21.3.1 is available. 目录 You are using pip version 10.0.1, however version 21.3.1 is available. 【常见模块错误】 【解决方案】 欢迎来到英杰社区https://bbs.csdn.net/topics/617804998 欢迎来到我的主页&#…...

ZjDroid命令大全:从DEX内存dump到Lua脚本注入的完整教程
ZjDroid命令大全:从DEX内存dump到Lua脚本注入的完整教程 【免费下载链接】ZjDroid Android app dynamic reverse tool based on Xposed framework. 项目地址: https://gitcode.com/gh_mirrors/zj/ZjDroid ZjDroid是一款基于Xposed框架的Android应用动态逆向分…...

Unity安卓构建实战指南:解决APK真机安装闪退与构建失败
1. 这不是一本“从零开始”的书,而是一份你真正上手Unity安卓游戏开发前必须撕开的说明书我带过三届Unity实习工程师,也帮二十多个独立开发者把Demo打包进Google Play。每次看到新人在“安卓构建失败”报错里反复挣扎,或者对着“IL2CPP编译卡…...

诚信标签工厂端解决方案 适配俄标 CRPT 体系一体化技术方案
俄罗斯诚实标签依托 CRPT 体系执行强制管控,各类出口货品必须完成 Data Matrix 编码采集、格式转换、多层包装数据绑定,数据合规后方可通关流通。美妆食品、日化建材、玩具五金等品类包装形态差异较大,人工采集方式普遍存在识别精度不足、批量…...

亚马逊卖家公开信息数据提取:反爬攻防战与 Python 批量采集实战
摘要: 批量获取亚马逊(Amazon)第三方卖家的商业名称、信用代码和注册地址等信息,对于跨境 B2B 拓客和供应链分析具有重要意义。然而,亚马逊的 Cloudflare 盾和 Robot 验证码构成了极高的反爬门槛。本文将深度解析亚马逊…...

ARM架构CONSTRAINED UNPREDICTABLE行为解析与应对
1. ARM架构中的CONSTRAINED UNPREDICTABLE行为解析在处理器架构设计中,UNPREDICTABLE行为通常指架构规范未明确定义的执行结果,可能导致不可预期的系统状态。ARM架构通过引入CONSTRAINED UNPREDICTABLE机制,将这类行为限制在特定范围内&#…...
:这份内部测试SOP已被3家头部科技公司紧急采购)
DeepSeek-R1补全能力封测倒计时(仅剩72小时开放API灰度权限):这份内部测试SOP已被3家头部科技公司紧急采购
更多请点击: https://intelliparadigm.com 第一章:DeepSeek-R1代码补全能力封测全景概览 DeepSeek-R1 是深度求索(DeepSeek)推出的高性能开源推理模型,在代码补全场景中展现出显著的上下文理解力与多语言泛化能力。本…...

解决Claude Code Token不足问题并享受Taotoken活动价
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 解决Claude Code Token不足问题并享受Taotoken活动价 应用场景类,聚焦于使用Claude Code时遇到Token配额紧张的开发者&…...
)
Mysql:事务管理(中)
在前面的章节中,我们提到了 MVCC(多版本并发控制),它巧妙地通过“版本快照”解决了“读-写”冲突,实现了非阻塞读。但如果两个事务同时执行 UPDATE 操作修改同一行数据,即 写-写(Write-Write&am…...

【紧急预警】Lindy衰减临界点已提前至第8.3个月!2024最新《营销自动化寿命健康度白皮书》限时开放前500份
更多请点击: https://kaifayun.com 第一章:Lindy衰减临界点的理论重构与实证突破 Lindy效应传统上描述“越老越长寿”的非线性生存规律,但其在现代软件系统、开源生态与协议层技术栈中的适用边界正遭遇结构性挑战。本文首次将Lindy模型从静…...

179个核心职位,50个公司分类,中国大模型产业全栈
最后 对于正在迷茫择业、想转行提升,或是刚入门的程序员、编程小白来说,有一个问题几乎人人都在问:未来10年,什么领域的职业发展潜力最大? 答案只有一个:人工智能(尤其是大模型方向)…...