HAL STM32 SPI/ABZ/PWM方式读取MT6816磁编码器数据
HAL STM32 SPI/ABZ/PWM方式读取MT6816磁编码器数据
- 📚MT6816相关资料(来自商家的相关资料):
资料:https://pan.baidu.com/s/1CAbdLBRi2dmL4D7cFve1XA?pwd=8888
提取码:8888
- 📍驱动代码编写,可信源参考:
https://github.com/simplefoc/Arduino-FOC-drivers/blob/master/src/encoders/mt6816/MT6816.cpp
https://github.com/unlir/XDrive/blob/master/Firmware_APP/Base_Drivers/mt6816.c
📗MT6816所有型号和功能描述差异表

- 从上图型号描述上看,差异在于ABZ模式下,径向磁铁旋转一圈,正交编码(A、B线)输出的脉冲数( ABZ输出分辨率)差异,对于Z线来讲,径向磁铁旋转一圈,都只产生一个脉冲信号,该脉冲信号的脉宽有所不同,读取角度的精度还是一样的。
- 如果选择SPI作为通讯,选择基础款:
MT6816CT-STD-R就可以了。- 如果ABZ模式下使用,推荐
MT6816CT-ACD/ACE相比于AKD/AKH,一圈内,分辨率多了24个脉冲信号,正交编码信号相对变窄了一些。- 具体的其他型号的用途和场景使用,没有研究不做讨论。

🛠输出模式配置说明
MT6816可以输出ABZ、UVW和PWM信号,另外还可以通过4线或3线SPI接口读取14位的绝对角度寄存器。其中ABZ、UVW和SPI接口是互相复用I/O引脚的。SPI接口和ABZ/UVW之间是通过HVPP引脚进行配置的,当HVPP接高电平VDD时,相关I/O管脚切换至SPI模式;当HVPP接地时,芯片相关I/O切换至ABZ或UVW模式。ABZ和UVW模式的切换,由芯片内部相关寄存器控制。4线SPI和3线SPI也是通过芯片内部寄存器进行切换控制的,MT6816出厂默认配置为4线SPI.
- 👉ABZ、UVW和PWM信号读取数据和SPI方式读取数据区别在于芯片的第2引脚,如果接VCC就是SPI方式,如果接GND就是ABZ、UVW和PWM方式读取。
- 🔧ABZ, UVW 和PWM模式参考电路:

🍁MT6816 SPI参考电路
- 🌿SPI方式参考电路:


- ⚡在手册中,没有提到
mosi上拉,在实际测试过程中,如果外部没有配置上拉或者mcu驱动引脚(mosi)内部没有开启上拉,则读取不到数据,这一点需要注意,这个坑,排查了很久才发现。✨推荐在硬件电路设计时,在mosi引脚(芯片第5引脚)外部添加一个4.7K的上拉电阻。
- 👉对于较老的STM32F103系列,在配置软件上没有该配置选项,需要使用外部上拉电阻。

🧬MT6816 SPI时序
MT6816的SPI使用模式3(CPOL=1, CPHA=1)传输数据。如图-16所示,数据传输开始于CSN的下降沿,结束于CSN的上升沿,MT6816在时钟上升沿采样数据。
- 时序图:

📄4线SPI协议
- 🌿4线SPI协议时序

MT6816的CSN下降沿激活SPI通信,CSN的上升沿结束SPI通信。SCK时钟信号由上位机发送给MT6816,在非通信状态下,请保持SCK为高电平;MOSI (上位机输出、MT6816输入) 和MISO (上位机输入、MT6816输出) 是SPI接口的两路数据信号, 数据都是在时钟信号SCK的下降沿发生改变,所以推荐使用SCK时钟信号的上升沿对数据进行采样.
- 比特 0: 读写标志位,。低电平为写操作,此时数据DI7~DI0写入芯片;高电平为读操作,此时从芯
片读出数据DO7~DO0 。- 比特 1-7: 地址A6~A0。 寄存器操作地址。
- 比特 8-15: 数据 DI7~DI0 (写模式)。会被写入芯片的数据 (MSB优先)。
- 比特 8-15: 数据DO7~DO0 (读模式)。 从芯片读出的数据(MSB优先)。
📑3线SPI协议
- 3线SPI时序

CSN的下降沿激活SPI通信,CSN的上升沿结束SPI通信。SCK时钟信号由上位机发送给MT6816,在非通信状态下,请保持SCK为高电平。SDA是数据输入输出信号数据,是在时钟信号SCK的下降沿发生改变,所以推荐使用SCK时钟信号的上升沿对数据进行采样 。
- Bit 0: 读写标志位,。低电平为写操作,此时数据DI7~DI0写入芯片;高电平为读操作,此时从芯
片读出数据DO7~DO0 。- Bit 1-7: 地址A6~A0。 寄存器操作地址。
- Bit 8-15: 数据 D7~D0 (写模式)。会被写入芯片的数据 (MSB优先)。
- Bit 8-15: 数据D7~D0 (读模式)。 从芯片读出的数据(MSB优先)。
📗SPI读取角度数据(4线SPI)
- 🌿4线SPI读取角度数据

- 📐角度数据寄存器


- 🌿3线SPI读角度时序:

📝SPI/ABZ/PWM驱动代码
- ✨本驱动代码从
https://github.com/unlir/XDrive项目中,移植有关MT6816内容,作为单独驱动读取MT6816磁编码器数据使用。
- 🌿mt6816.c
/************************************************************************************** @project : XDrive_Step** @brief : Stepper motor with multi-function interface and closed loop function.** @brief : 具有多功能接口和闭环功能的步进电机** @author : unlir (知不知啊)** @contacts: QQ.1354077136******** @address : https://github.com/unlir/XDrive************************************************************************************** {Stepper motor with multi-function interface and closed loop function.}** Copyright (c) {2020} {unlir(知不知啊)}**** This program is free software: you can redistribute it and/or modify** it under the terms of the GNU General Public License as published by** the Free Software Foundation, either version 3 of the License, or** (at your option) any later version.**** This program is distributed in the hope that it will be useful,** but WITHOUT ANY WARRANTY; without even the implied warranty of** MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the** GNU General Public License for more details.**** You should have received a copy of the GNU General Public License** along with this program. If not, see <http://www.gnu.org/licenses/>.******************************************************************************
******/#include "mt6816.h"//GPIO输出
#define MT6816_SPI_CS_H() (MT6816_SPI_CS_GPIO_Port -> BSRR = MT6816_SPI_CS_Pin)
#define MT6816_SPI_CS_L() (MT6816_SPI_CS_GPIO_Port -> BRR = MT6816_SPI_CS_Pin)#if (MT6816_Mode == MT6816_Mode_PWM)
/****************************** MT6816_PWM ******************************/
/****************************** MT6816_PWM ******************************/
/****************************** MT6816_PWM ******************************/
MT6816_PWM_Signal_Typedef mt6816_pwm;/*** @brief TIM_MT6816_PWM初始化* @param NULL* @retval NULL
**/
void REIN_TIM_MT6816_PWM_Init(void)
{/* GPIO初始化 */GPIO_InitTypeDef GPIO_InitStruct = {0};/*GPIO Ports Clock Enable*/MT6816_PWM_GPIO_CLK_ENABLE(); //启用PWM端口时钟/*Configure GPIO pin*/GPIO_InitStruct.Pin = MT6816_PWM_Pin;GPIO_InitStruct.Mode = GPIO_MODE_INPUT; //输入模式GPIO_InitStruct.Pull = GPIO_PULLUP; //禁用上下拉HAL_GPIO_Init(MT6816_PWM_GPIO_Port, &GPIO_InitStruct);/* 定时器初始化 */TIM_SlaveConfigTypeDef sSlaveConfig = {0};TIM_MasterConfigTypeDef sMasterConfig = {0};TIM_IC_InitTypeDef sConfigIC = {0};MT6816_PWM_TIM_CLK_ENABLE(); //启用TIM时钟MT6816_PWM_Get_HTIM.Instance = MT6816_PWM_Get_TIM;MT6816_PWM_Get_HTIM.Init.Prescaler = (9 - 1); //预分频:9 采样频率 72M/9 = 8M 分辨精度125nsMT6816_PWM_Get_HTIM.Init.CounterMode = TIM_COUNTERMODE_UP; //向上计数MT6816_PWM_Get_HTIM.Init.Period = (65536 - 1); //采样宽度 65536 * 125ns = 8.192ms 频率122.07Hz (满足MT6816两种PWM频率输出)MT6816_PWM_Get_HTIM.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; //不分频MT6816_PWM_Get_HTIM.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; //禁用自动重新加载if (HAL_TIM_Base_Init(&MT6816_PWM_Get_HTIM) != HAL_OK) {Error_Handler();}if (HAL_TIM_IC_Init(&MT6816_PWM_Get_HTIM) != HAL_OK) {Error_Handler();}sSlaveConfig.SlaveMode = TIM_SLAVEMODE_RESET; //从模式:复位模式sSlaveConfig.InputTrigger = TIM_TS_TI1FP1; //从模式触发信号:TI1FP1sSlaveConfig.TriggerPolarity = TIM_INPUTCHANNELPOLARITY_RISING; //从模式触发极性:上升沿触发sSlaveConfig.TriggerFilter = 0; //禁用滤波器if (HAL_TIM_SlaveConfigSynchro(&MT6816_PWM_Get_HTIM, &sSlaveConfig) != HAL_OK) {Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET; //主模式:复位sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE; //禁用主机模式if (HAL_TIMEx_MasterConfigSynchronization(&MT6816_PWM_Get_HTIM, &sMasterConfig) != HAL_OK) {Error_Handler();}sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING; //上升沿捕获sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI; //TI1FP1sConfigIC.ICPrescaler = TIM_ICPSC_DIV1; //不分频sConfigIC.ICFilter = 0;if (HAL_TIM_IC_ConfigChannel(&MT6816_PWM_Get_HTIM, &sConfigIC, TIM_CHANNEL_1) != HAL_OK) {Error_Handler();}sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_FALLING; //下降沿捕获sConfigIC.ICSelection = TIM_ICSELECTION_INDIRECTTI; //TI1FP2if (HAL_TIM_IC_ConfigChannel(&MT6816_PWM_Get_HTIM, &sConfigIC, TIM_CHANNEL_2) != HAL_OK) {Error_Handler();}/*interrupt init*/HAL_NVIC_EnableIRQ(MT6816_PWM_Get_IRQn); //使能定时中断/*begin work*/HAL_TIM_Base_Stop(&MT6816_PWM_Get_HTIM); //停用TIMHAL_TIM_OC_Start_IT(&MT6816_PWM_Get_HTIM, TIM_CHANNEL_1); //启动CH捕获比较中断HAL_TIM_OC_Start_IT(&MT6816_PWM_Get_HTIM, TIM_CHANNEL_2); //启动CH捕获比较中断HAL_TIM_Base_Start_IT(&MT6816_PWM_Get_HTIM); //启动TIM中断模式
}
/*** @brief MT6816_PWM采集初始化* @param NULL* @retval NULL
**/
void REIN_MT6816_PWM_Signal_Init(void)
{//采集数据mt6816_pwm.h_width = 0;mt6816_pwm.period = 0;mt6816_pwm.count_rising = 0;mt6816_pwm.count_falling = 0;mt6816_pwm.count_update = 0;mt6816_pwm.whole_h_flag = false;mt6816_pwm.whole_l_flag = false;mt6816_pwm.ready_once = false;mt6816_pwm.ready_again = false;//输出数据mt6816_pwm.valid_width = 0;//配置外设REIN_TIM_MT6816_PWM_Init();
}/*** @brief MT6816_PWM采集中断回调* @param NULL* @retval NULL
**/
void REIN_MT6816_PWM_TIM_Callback(void)
{//定时器捕获中断通道1 (上升沿中断) (必须在更新中断前执行)if (__HAL_TIM_GET_FLAG(&MT6816_PWM_Get_HTIM, TIM_FLAG_CC1) != RESET){if (__HAL_TIM_GET_IT_SOURCE(&MT6816_PWM_Get_HTIM, TIM_IT_CC1) != RESET){__HAL_TIM_CLEAR_IT(&MT6816_PWM_Get_HTIM, TIM_IT_CC1);MT6816_PWM_Get_HTIM.Channel = HAL_TIM_ACTIVE_CHANNEL_1;//采集上升沿数据mt6816_pwm.period = HAL_TIM_ReadCapturedValue(&MT6816_PWM_Get_HTIM, TIM_CHANNEL_1) + 1; //获取PWM周期mt6816_pwm.count_rising = mt6816_pwm.count_update; //更新计数器镜像}}//定时器捕获中断通道2 (下降沿中断)if (__HAL_TIM_GET_FLAG(&MT6816_PWM_Get_HTIM, TIM_FLAG_CC2) != RESET){if (__HAL_TIM_GET_IT_SOURCE(&MT6816_PWM_Get_HTIM, TIM_IT_CC2) != RESET){__HAL_TIM_CLEAR_IT(&MT6816_PWM_Get_HTIM, TIM_IT_CC2);MT6816_PWM_Get_HTIM.Channel = HAL_TIM_ACTIVE_CHANNEL_2;//采集下降沿数据mt6816_pwm.h_width = HAL_TIM_ReadCapturedValue(&MT6816_PWM_Get_HTIM, TIM_CHANNEL_2) + 1; //获取PWM高宽度mt6816_pwm.count_falling = mt6816_pwm.count_update; //更新计数器镜像}}//定时器更新中断 (更新事件中断) (由更新事件触发 | 溢出事件触发)if (__HAL_TIM_GET_FLAG(&MT6816_PWM_Get_HTIM, TIM_FLAG_UPDATE) != RESET){if (__HAL_TIM_GET_IT_SOURCE(&MT6816_PWM_Get_HTIM, TIM_IT_UPDATE) != RESET){__HAL_TIM_CLEAR_IT(&MT6816_PWM_Get_HTIM, TIM_IT_UPDATE);//单次PWM全高全低检测if ( (mt6816_pwm.count_update != mt6816_pwm.count_rising) //(上升沿计数器镜像,更新计数器不相等)&& (mt6816_pwm.count_update != mt6816_pwm.count_falling) //(下降沿计数器镜像,更新计数器不相等)) {//读取PWM电平用于判定全高或全低if (MT6816_PWM_GPIO_Port -> IDR & MT6816_PWM_Pin) {mt6816_pwm.whole_h_flag = true; //置位100%标志mt6816_pwm.whole_l_flag = false; //清位0%标志}else {mt6816_pwm.whole_h_flag = false; //清位100%标志mt6816_pwm.whole_l_flag = true; //置位0%标志}}else {mt6816_pwm.count_update ++;mt6816_pwm.whole_h_flag = false; //清位100%标志mt6816_pwm.whole_l_flag = false; //清位0%标志}//单次PWM有效性确认if (0) {}else if ((mt6816_pwm.whole_h_flag)) mt6816_pwm.ready_once = false; //100%_PWM无效else if ((mt6816_pwm.whole_l_flag)) mt6816_pwm.ready_once = false; //0%_PWM无效//脉冲超长检测(无需检测)//脉冲超短检测(无需检测)else mt6816_pwm.ready_once = true;//可靠的PWM有效性确认if (mt6816_pwm.ready_once) {if (mt6816_pwm.ready_again) {mt6816_pwm.valid_width = mt6816_pwm.h_width;}else {mt6816_pwm.valid_width = 0;mt6816_pwm.ready_again = true;}}else {mt6816_pwm.valid_width = 0;mt6816_pwm.ready_again = false;}}}
}/*** @brief MT6816_PWM获取角度数据* @param NULL* @retval NULL
**/
void REIN_MT6816_PWM_Get_AngleData(void)
{//输出数据int32_t out = (mt6816_pwm.valid_width << 1) - 64;if (out < 0)mt6816_pwm.angle = 0;else if (out > 16383)mt6816_pwm.angle = 16383;elsemt6816_pwm.angle = out;
}#elif (MT6816_Mode == MT6816_Mode_ABZ)
/****************************** MT6816_ABZ ******************************/
/*** @brief TIM_MT6816_ABZ初始化* @param NULL* @retval NULL
**/
void REIN_TIM_MT6816_ABZ_Init(void)
{/* GPIO初始化 */GPIO_InitTypeDef GPIO_InitStruct = {0};/*GPIO Ports Clock Enable*/MT6816_ABZ_A_GPIO_CLK_ENABLE(); //启用ABZ_A端口时钟MT6816_ABZ_B_GPIO_CLK_ENABLE(); //启用ABZ_B端口时钟/*Configure GPIO pins*/GPIO_InitStruct.Pin = MT6816_ABZ_A_Pin;GPIO_InitStruct.Mode = GPIO_MODE_INPUT; //输入模式GPIO_InitStruct.Pull = GPIO_NOPULL; //禁用上下拉HAL_GPIO_Init(MT6816_ABZ_A_GPIO_Port, &GPIO_InitStruct);/*Configure GPIO pins*/GPIO_InitStruct.Pin = MT6816_ABZ_B_Pin;GPIO_InitStruct.Mode = GPIO_MODE_INPUT; //输入模式GPIO_InitStruct.Pull = GPIO_NOPULL; //禁用上下拉HAL_GPIO_Init(MT6816_ABZ_B_GPIO_Port, &GPIO_InitStruct);/* TIM初始化 */TIM_Encoder_InitTypeDef sConfig = {0};TIM_MasterConfigTypeDef sMasterConfig = {0};__HAL_RCC_TIM1_CLK_ENABLE();MT6816_ABZ_Get_HTIM.Instance = MT6816_ABZ_Get_TIM;MT6816_ABZ_Get_HTIM.Init.Prescaler = 0; //无预分频MT6816_ABZ_Get_HTIM.Init.CounterMode = TIM_COUNTERMODE_UP; //向上计数MT6816_ABZ_Get_HTIM.Init.Period = (4096 - 1); //12位周期MT6816_ABZ_Get_HTIM.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; //不分频MT6816_ABZ_Get_HTIM.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; //禁用自动重新加载sConfig.EncoderMode = TIM_ENCODERMODE_TI12; //双边沿四倍频采样sConfig.IC1Polarity = TIM_ICPOLARITY_RISING; //上升沿计数sConfig.IC1Selection = TIM_ICSELECTION_DIRECTTI; //TI1FP1sConfig.IC1Prescaler = TIM_ICPSC_DIV1; //不分频sConfig.IC1Filter = 0; //禁用滤波器sConfig.IC2Polarity = TIM_ICPOLARITY_FALLING; //下降沿计数sConfig.IC2Selection = TIM_ICSELECTION_DIRECTTI; //TF2FP2sConfig.IC2Prescaler = TIM_ICPSC_DIV1; //不分频sConfig.IC2Filter = 0; //禁用滤波器if (HAL_TIM_Encoder_Init(&MT6816_ABZ_Get_HTIM, &sConfig) != HAL_OK){Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET; //主机模式:复位sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE; //禁用主机模式if (HAL_TIMEx_MasterConfigSynchronization(&MT6816_ABZ_Get_HTIM, &sMasterConfig) != HAL_OK){Error_Handler();}/*begin work*/HAL_TIM_Base_Stop(&MT6816_ABZ_Get_HTIM);HAL_TIM_Encoder_Start(&MT6816_ABZ_Get_HTIM, TIM_CHANNEL_ALL);
}
/****************************** MT6816_ABZ GPIO初始化******************************/
/*** @brief GPIO初始化(MT6816_ABZ)* @param NULL* @retval NULL
*/
void REIN_GPIO_MT6816_ABZ_Init(void)
{
#if (defined SENSOR_HVPP_CLK_ENABLE) || (defined MT6816_ABZ_Z_GPIO_CLK_ENABLE)GPIO_InitTypeDef GPIO_InitStruct = {0};
#endif#ifdef SENSOR_HVPP_CLK_ENABLE/* GPIO Ports Clock Enable */SENSOR_HVPP_CLK_ENABLE(); //启用MT6816_HVPP端口时钟/*Configure GPIO pin Output Level*/SENSOR_HVPP_GPIO_Port -> BRR = SENSOR_HVPP_Pin; //MT6816_HVPP引脚输出低电平,启动PWM+ABZ模式/*Configure GPIO pins*/GPIO_InitStruct.Pin = SENSOR_HVPP_Pin;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出GPIO_InitStruct.Pull = GPIO_NOPULL; //禁用上下拉GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; //低速HAL_GPIO_Init(SENSOR_HVPP_GPIO_Port, &GPIO_InitStruct);
#endif#ifdef MT6816_ABZ_Z_GPIO_CLK_ENABLE/* GPIO Ports Clock Enable */MT6816_ABZ_Z_GPIO_CLK_ENABLE(); //启用MT6816_ABZ_Z端口时钟/*Configure GPIO pins*/GPIO_InitStruct.Pin = MT6816_ABZ_Z_Pin;GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING; //上升沿触发中断GPIO_InitStruct.Pull = GPIO_NOPULL; //禁用上下拉HAL_GPIO_Init(MT6816_ABZ_Z_GPIO_Port, &GPIO_InitStruct);/* EXTI interrupt init*/HAL_NVIC_EnableIRQ(MT6816_ABZ_Z_EXTI_IRQn); //启用MT6816_Z中断
#endif
}/****************************** MT6816_ABZ ******************************/
MT6816_ABZ_Signal_Typedef mt6816_abz;/*** @brief MT6816_ABZ采集初始化* @param NULL* @retval NULL
**/
void REIN_MT6816_ABZ_Signal_Init(void)
{//采集数据mt6816_abz.sample_data = 0;//输出数据mt6816_abz.angle = 0;//配置外设REIN_TIM_MT6816_ABZ_Init();REIN_GPIO_MT6816_ABZ_Init();
}/*** @brief MT6816_ABZ采集Z脉冲中断回调* @param NULL* @retval NULL
**/
void REIN_MT6816_ABZ_ZPulse_Callback(void)
{//清除定时器计数值__HAL_TIM_SET_COUNTER(&MT6816_ABZ_Get_HTIM, 0);
}/*** @brief MT6816_ABZ获取角度数据* @param NULL* @retval NULL
**/
void REIN_MT6816_ABZ_Get_AngleData(void)
{//采集数据mt6816_abz.sample_data = __HAL_TIM_GET_COUNTER(&MT6816_ABZ_Get_HTIM) & 0x0FFF; //读取定时器计数值//输出数据mt6816_abz.angle = ((mt6816_abz.sample_data + 1) << 2) - 1; //获得数值0~16383
}#elif (MT6816_Mode == MT6816_Mode_SPI)
/****************************** MT6816_SPI ******************************/
/****************************** MT6816_SPI GPIO初始化******************************/
/*** @brief GPIO初始化(MT6816_SPI)* @param NULL* @retval NULL
*/
void REIN_GPIO_MT6816_SPI_Init(void)
{GPIO_InitTypeDef GPIO_InitStruct = {0};#ifdef SENSOR_HVPP_CLK_ENABLE/* GPIO Ports Clock Enable */SENSOR_HVPP_CLK_ENABLE(); //启用MT6816_HVPP端口时钟/*Configure GPIO pin Output Level*/SENSOR_HVPP_GPIO_Port -> BSRR = SENSOR_HVPP_Pin; //MT6816_HVPP引脚输出高电平,启动PWM+SPI模式/*Configure GPIO pins*/GPIO_InitStruct.Pin = SENSOR_HVPP_Pin;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出GPIO_InitStruct.Pull = GPIO_NOPULL; //禁用上下拉GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; //低速HAL_GPIO_Init(SENSOR_HVPP_GPIO_Port, &GPIO_InitStruct);
#endif/* GPIO Ports Clock Enable */MT6816_SPI_CS_GPIO_CLK_ENABLE(); //启用MT6816_SPI_CS端口时钟/*Configure GPIO pin Output Level*/MT6816_SPI_CS_GPIO_Port -> BSRR = MT6816_SPI_CS_Pin; //CS引脚启动输出高电平/*Configure GPIO pins*/GPIO_InitStruct.Pin = MT6816_SPI_CS_Pin;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出GPIO_InitStruct.Pull = GPIO_NOPULL; //禁用上下拉GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; //低速HAL_GPIO_Init(MT6816_SPI_CS_GPIO_Port, &GPIO_InitStruct);
}/****************************** MT6816_SPI 接口初始化******************************/
/*** @brief SPI初始化(MT6816)* @param NULL* @retval NULL
**/
void REIN_SPI_MT6816_SPI_Init(void)
{/* AFIO初始化 */GPIO_InitTypeDef GPIO_InitStruct = {0};/*GPIO Ports Clock Enable*/MT6816_SPI_CLK_GPIO_CLK_ENABLE(); //启用CLK端口时钟MT6816_SPI_MOSI_GPIO_CLK_ENABLE(); //启用MOSI端口时钟MT6816_SPI_MISO_GPIO_CLK_ENABLE(); //启用MISO端口时钟/*Configure GPIO pins*/GPIO_InitStruct.Pin = MT6816_SPI_CLK_Pin;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; //复用推挽GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; //高速HAL_GPIO_Init(MT6816_SPI_CLK_GPIO_Port, &GPIO_InitStruct);/*Configure GPIO pins*/GPIO_InitStruct.Pin = MT6816_SPI_MOSI_Pin;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; //复用推挽GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; //高速HAL_GPIO_Init(MT6816_SPI_MOSI_GPIO_Port, &GPIO_InitStruct);/*Configure GPIO pins*/GPIO_InitStruct.Pin = MT6816_SPI_MISO_Pin;GPIO_InitStruct.Mode = GPIO_MODE_INPUT; //输入GPIO_InitStruct.Pull = GPIO_NOPULL; //禁用上下拉HAL_GPIO_Init(MT6816_SPI_MISO_GPIO_Port, &GPIO_InitStruct);/*Configure AFIO*/
#ifdef MT6816_SPI_AFIO_REMAPMT6816_SPI_AFIO_REMAP //启用备用的SPI_AFIO映射
#endif/* SPI初始化 */MT6816_SPI_SPI_CLK_ENABLE(); //启用SPI时钟MT6816_SPI_Get_HSPI.Instance = MT6816_SPI_Get_SPI;MT6816_SPI_Get_HSPI.Init.Mode = SPI_MODE_MASTER; //主机模式MT6816_SPI_Get_HSPI.Init.Direction = SPI_DIRECTION_2LINES; //双向传输MT6816_SPI_Get_HSPI.Init.DataSize = SPI_DATASIZE_16BIT; //数据位宽:16MT6816_SPI_Get_HSPI.Init.CLKPolarity = SPI_POLARITY_HIGH; //CLK空闲时高电平MT6816_SPI_Get_HSPI.Init.CLKPhase = SPI_PHASE_2EDGE; //第二边沿采样MT6816_SPI_Get_HSPI.Init.NSS = SPI_NSS_SOFT; //软件NSSMT6816_SPI_Get_HSPI.Init.BaudRatePrescaler = MT6816_SPI_Prescaler; //输入预设分频MT6816_SPI_Get_HSPI.Init.FirstBit = SPI_FIRSTBIT_MSB; //MSB传输MT6816_SPI_Get_HSPI.Init.TIMode = SPI_TIMODE_DISABLE; //禁用中断模式MT6816_SPI_Get_HSPI.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE; //禁用CRC校验MT6816_SPI_Get_HSPI.Init.CRCPolynomial = 10; //CRC校验多项式if (HAL_SPI_Init(&MT6816_SPI_Get_HSPI) != HAL_OK){Error_Handler();}
}
MT6816_SPI_Signal_Typedef mt6816_spi;/*** @brief MT6816_SPI采集初始化* @param NULL* @retval NULL
**/
void REIN_MT6816_SPI_Signal_Init(void)
{//采集数据mt6816_spi.sample_data = 0;//输出数据mt6816_spi.angle = 0;//配置外设REIN_GPIO_MT6816_SPI_Init();REIN_SPI_MT6816_SPI_Init();
}/*** @brief MT6816_SPI采集获取角度数据* @param NULL* @retval NULL
**/
void RINE_MT6816_SPI_Get_AngleData(void)
{uint16_t data_t[2];uint16_t data_r[2];uint8_t h_count;data_t[0] = (0x80 | 0x03) << 8;data_t[1] = (0x80 | 0x04) << 8;for (uint8_t i = 0; i < 3; i++) {//读取SPI数据MT6816_SPI_CS_L();HAL_SPI_TransmitReceive(&MT6816_SPI_Get_HSPI, (uint8_t*)&data_t[0], (uint8_t*)&data_r[0], 1, HAL_MAX_DELAY);MT6816_SPI_CS_H();MT6816_SPI_CS_L();HAL_SPI_TransmitReceive(&MT6816_SPI_Get_HSPI, (uint8_t*)&data_t[1], (uint8_t*)&data_r[1], 1, HAL_MAX_DELAY);MT6816_SPI_CS_H();mt6816_spi.sample_data = ((data_r[0] & 0x00FF) << 8) | (data_r[1] & 0x00FF);//奇偶校验h_count = 0;for (uint8_t j = 0; j < 16; j++) {if (mt6816_spi.sample_data & (0x0001 << j))h_count++;}if (h_count & 0x01) {mt6816_spi.pc_flag = false;}else {mt6816_spi.pc_flag = true;break;}}if (mt6816_spi.pc_flag) {mt6816_spi.angle = mt6816_spi.sample_data >> 2;mt6816_spi.no_mag_flag = (bool)(mt6816_spi.sample_data & (0x0001 << 1));}
}#endif/****************************** MT6816 ******************************/
/****************************** MT6816 ******************************/
/****************************** MT6816 ******************************/
MT6816_Typedef mt6816;/*** @brief MT6816初始化* @param NULL* @retval NULL
**/
void REIN_MT6816_Init(void)
{
#ifndef MT6816_Mode
#error "NO define MT6816_Mode"
#endif
#if (MT6816_Mode == MT6816_Mode_PWM)REIN_MT6816_PWM_Signal_Init(); //初始化PWM接口
#elif (MT6816_Mode == MT6816_Mode_SPI)REIN_MT6816_SPI_Signal_Init(); //初始化SPI接口
#elif (MT6816_Mode == MT6816_Mode_ABZ)REIN_MT6816_ABZ_Signal_Init(); //初始化ABZ接口
#else
#error "MT6816_Mode Invalid !!!"
#endif//初始化阶段获取一次角度数据(过滤错误数据)(暂未查明复位后第一次读取数据丢失的原因)REIN_MT6816_Get_AngleData();}/*** @brief MT6816获取角度数据* @param NULL* @retval NULL
**/
void REIN_MT6816_Get_AngleData(void)
{
#ifndef MT6816_Mode
#error "NO define MT6816_Mode"
#endif
#if (MT6816_Mode == MT6816_Mode_PWM)REIN_MT6816_PWM_Get_AngleData(); //MT6816_PWM获取角度数据mt6816.angle_data = mt6816_pwm.angle;mt6816.angle = 360*mt6816.angle_data/16384.00f; //转换后的角度0 - 360
#elif (MT6816_Mode == MT6816_Mode_SPI)RINE_MT6816_SPI_Get_AngleData();mt6816.angle_data = mt6816_spi.angle;mt6816.angle = 360*mt6816.angle_data/16384.00f; //转换后的角度0 - 360
#elif (MT6816_Mode == MT6816_Mode_ABZ)REIN_MT6816_ABZ_Get_AngleData(); //MT6816_ABZ获取角度数据#else
#error "MT6816_Mode Invalid !!!"
#endif
}#if (MT6816_Mode == MT6816_Mode_PWM)
/*** @brief TIM3_IRQHandler
**/
void TIM3_IRQHandler(void)
{//TIM3的中断标志清除由PWM处理函数识别并清除REIN_MT6816_PWM_TIM_Callback(); //MT6816_PWM采集中断回调
}
#endif#if (MT6816_Mode == MT6816_Mode_ABZ)
/*** @brief EXTI15_10_IRQHandler
**/
void EXTI15_10_IRQHandler(void)
{if (__HAL_GPIO_EXTI_GET_IT(MT6816_ABZ_Z_Pin) != 0x00u){__HAL_GPIO_EXTI_CLEAR_IT(MT6816_ABZ_Z_Pin);REIN_MT6816_ABZ_ZPulse_Callback(); //编码器器Z脉冲中断}
}
#endif- 🌿mt6816.h
/************************************************************************************** @project : XDrive_Step** @brief : Stepper motor with multi-function interface and closed loop function.** @brief : 具有多功能接口和闭环功能的步进电机** @author : unlir (知不知啊)** @contacts: QQ.1354077136******** @address : https://github.com/unlir/XDrive************************************************************************************** {Stepper motor with multi-function interface and closed loop function.}** Copyright (c) {2020} {unlir(知不知啊)}**** This program is free software: you can redistribute it and/or modify** it under the terms of the GNU General Public License as published by** the Free Software Foundation, either version 3 of the License, or** (at your option) any later version.**** This program is distributed in the hope that it will be useful,** but WITHOUT ANY WARRANTY; without even the implied warranty of** MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the** GNU General Public License for more details.**** You should have received a copy of the GNU General Public License** along with this program. If not, see <http://www.gnu.org/licenses/>.******************************************************************************
******/#ifndef MT6816_H
#define MT6816_H#ifdef __cplusplus
extern "C" {
#endif
#include <stdbool.h>
//引用端口定义/********** MT6816 **********/
//MT6816模式控制(GPIO)
#define SENSOR_HVPP_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE() //PA7
#define SENSOR_HVPP_GPIO_Port (GPIOA)
#define SENSOR_HVPP_Pin (GPIO_PIN_7)
//MT6816_PWM采集(AFIO & TIM)
#define MT6816_PWM_GPIO_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE() //PA6
#define MT6816_PWM_GPIO_Port (GPIOA)
#define MT6816_PWM_Pin (GPIO_PIN_6)
#define MT6816_PWM_TIM_CLK_ENABLE() __HAL_RCC_TIM3_CLK_ENABLE() //TIM3
#define MT6816_PWM_Get_TIM (TIM3)
#define MT6816_PWM_Get_HTIM (htim3)
#define MT6816_PWM_Get_IRQn (TIM3_IRQn) //TIM3中断
//MT6816_ABZ采集(GPIO)
#define MT6816_ABZ_Z_GPIO_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE() //PA10
#define MT6816_ABZ_Z_GPIO_Port (GPIOA)
#define MT6816_ABZ_Z_Pin (GPIO_PIN_10)
#define MT6816_ABZ_Z_EXTI_IRQn (EXTI15_10_IRQn) //EXTI15_10中断
//MT6816_ABZ采集(AFIO & TIM)
#define MT6816_ABZ_A_GPIO_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE() //PA8
#define MT6816_ABZ_A_GPIO_Port (GPIOA)
#define MT6816_ABZ_A_Pin (GPIO_PIN_8)
#define MT6816_ABZ_B_GPIO_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE() //PA9
#define MT6816_ABZ_B_GPIO_Port (GPIOA)
#define MT6816_ABZ_B_Pin (GPIO_PIN_9)
#define MT6816_ABZ_TIM_CLK_ENABLE() __HAL_RCC_TIM1_CLK_ENABLE() //TIM1
#define MT6816_ABZ_Get_TIM (TIM1)
#define MT6816_ABZ_Get_HTIM (htim1)
//MT6816_SPI采集(GPIO)
//#define MT6816_SPI_CS_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() //PB12
//#define MT6816_SPI_CS_GPIO_Port (GPIOB)
//#define MT6816_SPI_CS_Pin (GPIO_PIN_12)
//MT6816_SPI采集(AFIO & SPI)
//#define MT6816_SPI_CLK_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() //PB13
//#define MT6816_SPI_CLK_GPIO_Port (GPIOB)
//#define MT6816_SPI_CLK_Pin (GPIO_PIN_13)
//#define MT6816_SPI_MISO_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() //PB14
//#define MT6816_SPI_MISO_GPIO_Port (GPIOB)
//#define MT6816_SPI_MISO_Pin (GPIO_PIN_14)
//#define MT6816_SPI_MOSI_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() //PB15
//#define MT6816_SPI_MOSI_GPIO_Port (GPIOB)
//#define MT6816_SPI_MOSI_Pin (GPIO_PIN_15)
//#define MT6816_SPI_SPI_CLK_ENABLE() __HAL_RCC_SPI2_CLK_ENABLE(); //SPI2
//#define MT6816_SPI_Get_SPI (SPI2)
//#define MT6816_SPI_Get_HSPI (hspi2)
//#define MT6816_SPI_AFIO_REMAP __HAL_AFIO_REMAP_SPI2_ENABLE(); //SPI2_AFIO端口重新映射/********** MT6816 **********/
//MT6816_SPI采集(GPIO)
#define MT6816_SPI_CS_GPIO_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE() //PA15
#define MT6816_SPI_CS_GPIO_Port (GPIOA)
#define MT6816_SPI_CS_Pin (GPIO_PIN_15)
//MT6816_SPI采集(AFIO & SPI)
#define MT6816_SPI_CLK_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() //PB3
#define MT6816_SPI_CLK_GPIO_Port (GPIOB)
#define MT6816_SPI_CLK_Pin (GPIO_PIN_3)
#define MT6816_SPI_MISO_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() //PB4
#define MT6816_SPI_MISO_GPIO_Port (GPIOB)
#define MT6816_SPI_MISO_Pin (GPIO_PIN_4)
#define MT6816_SPI_MOSI_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() //PB5
#define MT6816_SPI_MOSI_GPIO_Port (GPIOB)
#define MT6816_SPI_MOSI_Pin (GPIO_PIN_5)
#define MT6816_SPI_SPI_CLK_ENABLE() __HAL_RCC_SPI1_CLK_ENABLE(); //SPI1
#define MT6816_SPI_Get_SPI (SPI1)
#define MT6816_SPI_Get_HSPI (hspi1)
#define MT6816_SPI_AFIO_REMAP __HAL_AFIO_REMAP_SPI1_ENABLE(); //SPI1_AFIO端口重新映射
#define MT6816_SPI_Prescaler (SPI_BAUDRATEPRESCALER_8)
//MT6816工作模式定义
#define MT6816_Mode_PWM (0x01) //MT6816工作在PWM模式 (支持该模式的硬件版本:XDrive_REIN_Basic_H1_0)
#define MT6816_Mode_ABZ (0x02) //MT6816工作在ABZ模式 (支持该模式的硬件版本:XDrive_REIN_Basic_H1_0)
#define MT6816_Mode_SPI (0x03) //MT6816工作在SPI模式 (支持该模式的硬件版本:XDrive_REIN_Basic_H1_0 / XDrive_REIN_Basic_H1_1)//MT6816工作模式配置
#define MT6816_Mode MT6816_Mode_PWM#if (MT6816_Mode == MT6816_Mode_PWM)
#include "tim.h"
/********** MT6816_PWM **********/
/********** MT6816_PWM **********/
/********** MT6816_PWM **********/
typedef struct {//采集数据(PWM)uint16_t h_width; //PWM高宽度uint16_t period; //PWM周期uint8_t count_rising; //PWM上升沿计数器镜像uint8_t count_falling; //PWM下降沿计数器镜像uint8_t count_update; //PWM更新计数器bool whole_h_flag; //PWM全高标志bool whole_l_flag; //PWM全低标志bool ready_once; //PWM就绪标志(完成一次PWM采集后置位)bool ready_again; //PWM就绪标志(完成二次PWM采集后置位)uint16_t valid_width; //PWM有效宽度//输出数据(PWM)uint16_t angle;
} MT6816_PWM_Signal_Typedef;//MT6816_PWM
void REIN_MT6816_PWM_Signal_Init(void); //MT6816_PWM采集初始化
void REIN_MT6816_PWM_TIM_Callback(void); //MT6816_PWM采集中断回调
void REIN_MT6816_PWM_Get_AngleData(void); //MT6816_PWM获取角度数据#elif (MT6816_Mode == MT6816_Mode_ABZ)
/********** MT6816_ABZ **********/
/********** MT6816_ABZ **********/
/********** MT6816_ABZ **********/
typedef struct {//采集数据(ABZ)uint16_t sample_data; //ABZ读取到的数据//输出数据(ABZ)uint16_t angle; //ABZ输出的角度
} MT6816_ABZ_Signal_Typedef;//MT6816_ABZ
void REIN_MT6816_ABZ_Signal_Init(void); //MT6816_ABZ采集初始化
void REIN_MT6816_ABZ_ZPulse_Callback(void); //MT6816_ABZ采集Z脉冲中断回调
void REIN_MT6816_ABZ_Get_AngleData(void); //MT6816_ABZ获取角度数据#elif (MT6816_Mode == MT6816_Mode_SPI)
#include "spi.h"
/********** MT6816_SPI **********/
/********** MT6816_SPI **********/
/********** MT6816_SPI **********/
typedef struct {//采集数据uint16_t sample_data; //SPI读取到的数据//输出数据uint16_t angle; //SPI输出的角度bool no_mag_flag; //磁铁数据有效标志bool pc_flag; //奇偶校验位
} MT6816_SPI_Signal_Typedef;//MT6816_SPI
void REIN_MT6816_SPI_Signal_Init(void); //MT6816_SPI采集初始化
void RINE_MT6816_SPI_Get_AngleData(void); //MT6816_SPI采集获取角度数据#endif/********** MT6816 **********/
/********** MT6816 **********/
/********** MT6816 **********/
typedef struct {uint16_t angle_data; //角度数据float angle; //换算陈0 - 360 角度数据
// bool rectify_valid; //校准数据有效标志
} MT6816_Typedef;
extern MT6816_Typedef mt6816;//MT6816
void REIN_MT6816_Init(void); //MT6816初始化
void REIN_MT6816_Get_AngleData(void); //MT6816获取角度数据#ifdef __cplusplus
}
#endif#endif⛳驱动代码使用说明
- 🔖驱动代码基于
STM32F103,SPI/ABZ/PWM 3方式读取MT6816磁编码器数据做过实测验证。 - 🌿SPI方式默认采用的是SPI1。
- 🌿ABZ方式需要用到TIM1定时器。
- 🌿PWM方式需要利用到TIM3定时器。
🔧STM32CubeMX工程配置说明:
- 针对使用不同通讯方式:
-
SPI方式:使能spi1接口即可。(驱动代码中已经包含了对SPI1的初始化代码,其他方式相同,主要是为例生成驱动文件,用来包含
spi.h、tim.h头文件)

-
ABZ模式:使能定时器TIM1既可。

-
PWM方式:使能定时器TIM3即可。

-
🌟生成的驱动代码,默认初始化的函数用不到,全部注释掉:(驱动代码中已经包含了相关初始化代码)

-
📑调用方式:
REIN_MT6816_Init();//初始化MT6816
#if (MT6816_Mode == MT6816_Mode_PWM)HAL_NVIC_SetPriority(MT6816_PWM_Get_IRQn, 1, 0); //定时器捕获(MT6816_PWM_PWM)获取MT6816_PWM两个边沿计数值
#endif
#if (MT6816_Mode == MT6816_Mode_ABZ)HAL_NVIC_SetPriority(MT6816_ABZ_Z_EXTI_IRQn, 1, 0); //外部中断(MT6816_ABZ_Z脉冲) 矫正MT6816_ABZ信号
#endif
while(1) {REIN_MT6816_Get_AngleData(); //MT6816获取角度数据printf("angle_data:%d,angle:%.2f\r\n", mt6816.angle_data, mt6816.angle);HAL_Delay(1000);}
- 🔖以下资源性链接不公开,为避免文章和资源被爬取和盗用,不再对外公布相关资源链接,如果按照上面提供的驱动代码无法独立驱动起来,而你是真正需要这份源码作为参考,用于个人学习研究,可以私信作者,其具体文章和相关资源。
相关文章:
HAL STM32 SPI/ABZ/PWM方式读取MT6816磁编码器数据
HAL STM32 SPI/ABZ/PWM方式读取MT6816磁编码器数据 📚MT6816相关资料(来自商家的相关资料): 资料:https://pan.baidu.com/s/1CAbdLBRi2dmL4D7cFve1XA?pwd8888 提取码:8888📍驱动代码编写&…...

HarmonyOS应用开发者高级认证,Next版本发布后最新题库 - 多选题序号5
基础认证题库请移步:HarmonyOS应用开发者基础认证题库 注:有读者反馈,题库的代码块比较多,打开文章时会卡死。所以笔者将题库拆分,单选题20个为一组,多选题10个为一组,题库目录如下,…...

Tekion 选择 ClickHouse Cloud 提升应用性能和指标监控
本文字数:4187;估计阅读时间:11 分钟 作者:ClickHouse team 本文在公众号【ClickHouseInc】首发 Tekion 由前 Tesla CIO Jay Vijayan 于 2016 年创立,利用大数据、人工智能和物联网等技术,为其汽车客户解决…...

mysql之触发器的使用
cr一:创建goods表和orders表; mysql> use mydb16_tirgeer Database changed mysql> create table goods(-> gid char(8) primary key,-> name varchar(10),-> price decimal(8,2),->-> num int); Query OK, 0 rows affected (0.0…...

使用Java和Hazelcast实现分布式数据存储
使用Java和Hazelcast实现分布式数据存储 大家好,我是微赚淘客系统3.0的小编,是个冬天不穿秋裤,天冷也要风度的程序猿! 在分布式系统中,实现高效的数据存储和管理是非常重要的。Hazelcast作为一个内存数据网格(IMDG)&…...

Hi3751V560_SELinux
Hi3751V560_SELinux setenforce Enforcing setenforce Permissive(或“setenforce 0”) getenforce V560:demo本身的: [ 13.765161] type=1400 audit(1628821512.905:4): avc: denied { read } for pid=1926 comm="system_server" name="ifindex" d…...

邮件安全篇:邮件反垃圾系统运作机制简介
1. 什么是邮件反垃圾系统? 邮件反垃圾系统是一种专门设计用于检测、过滤和阻止垃圾邮件的技术解决方案。用于保护用户的邮箱免受未经请求的商业广告、诈骗信息、恶意软件、钓鱼攻击和其他非用户意愿接收的电子邮件的侵扰。 反垃圾系统的常见部署形式 2. 邮件反垃圾…...

LoRaWAN设备的两种入网方式(ABP和OTAA)
目录 一、OTAA 1、名词解释 2、入网流程 二、ABP 三、两种入网方式的比较 一、OTAA 1、名词解释 (1)AppEUI:64位(8字节)的唯一标识符,用于标识特定的应用程序或组织(如果用的是chirpstac…...

【Rust光年纪】极致性能与灵活选择:Rust语言数学优化库详解
Rust语言中的数学优化:六大利器汇总 前言 在当今信息时代,数据处理和数学优化成为了各行各业中不可或缺的重要环节。为了满足对高效、快速计算的需求,Rust语言逐渐成为了许多开发者的首选,因其性能优越、并发安全等特点。本文将…...
机器学习 | 回归算法原理——最小二乘法
Hi,大家好,我是半亩花海。很早便想学习并总结一本很喜欢的机器学习图书——立石贤吾的《白话机器学习的数学》,可谓通俗易懂,清晰形象。那就在此分享并作为学习笔记来记录我的学习过程吧!本章的回归算法原理基于《基于…...

.NET Core 中的字符串压缩方法
字符串压缩的概念 字符串压缩通常指的是通过算法减少字符串表示所需的数据量,同时保持字符串的原始信息或能够无损地恢复原始字符串。这种压缩可以是针对文本数据的特定算法,也可以是更通用的数据压缩算法。 .NET Core 中的字符串压缩方法 使用数据压…...

SQL 基础知识
SQL(结构化查询语言)是一种用于管理和操作关系数据库的标准编程语言。以下是一些 SQL 的基础知识: 基本概念 数据库(Database): 存储和管理数据的容器。一个数据库可以包含多个表。 表(Table&…...

【数据结构初阶】单链表经典算法题十二道——得道飞升(上篇)
目录 1、移除元素 2、反转链表 3、链表的中间节点 4、合并两个有序链表 Relaxing Time!!! ———————————————— 天气之子幻 ———————————————— 1、移除元素 思路: 创建一个新链表࿰…...

Python爬虫技术 第16节 XPath
XPath是一种在XML文档中查找信息的语言,尽管XML和HTML在语法上有区别,但XPath同样适用于HTML文档的解析,尤其是在使用如lxml这样的库时。XPath提供了一种强大的方法来定位和提取XML/HTML文档中的元素和属性。 XPath基础 XPath表达式由路径表…...

本地部署,Whisper: 开源语音识别模型
目录 简介 特点 应用 使用方法 总结 GitHub - openai/whisper: Robust Speech Recognition via Large-Scale Weak SupervisionRobust Speech Recognition via Large-Scale Weak Supervision - openai/whisperhttps://github.com/openai/whisper 简介 Whisper 是一个由 O…...

history,hash缓存那些事
vue-router 中的 createWebHistory,createWebHashHistory两种模式 createWebHistory 是基于 window.history 对象是HTML5提供的用于维护当前标签页浏览历史的对象,主要功能是前进后退和在不刷新页面的情况下,修改地址栏里的URL地址。histor…...

Spring Boot的Web开发
目录 Spring Boot的Web开发 1.静态资源映射规则 第一种静态资源映射规则 2.enjoy模板引擎 3.springMVC 3.1请求处理 RequestMapping DeleteMapping 删除 PutMapping 修改 GetMapping 查询 PostMapping 新增 3.2参数绑定 一.支持数据类型: 3.3常用注解 一.Request…...

Spark 解析嵌套的 JSON 文件
1、什么是嵌套的JSON文件? 嵌套的JSON文件是指文件中包含了嵌套的JSON对象或数组。例如,以下是一个嵌套的JSON文件的示例: {"name": "John","age": 30,"address": {"street": "123…...
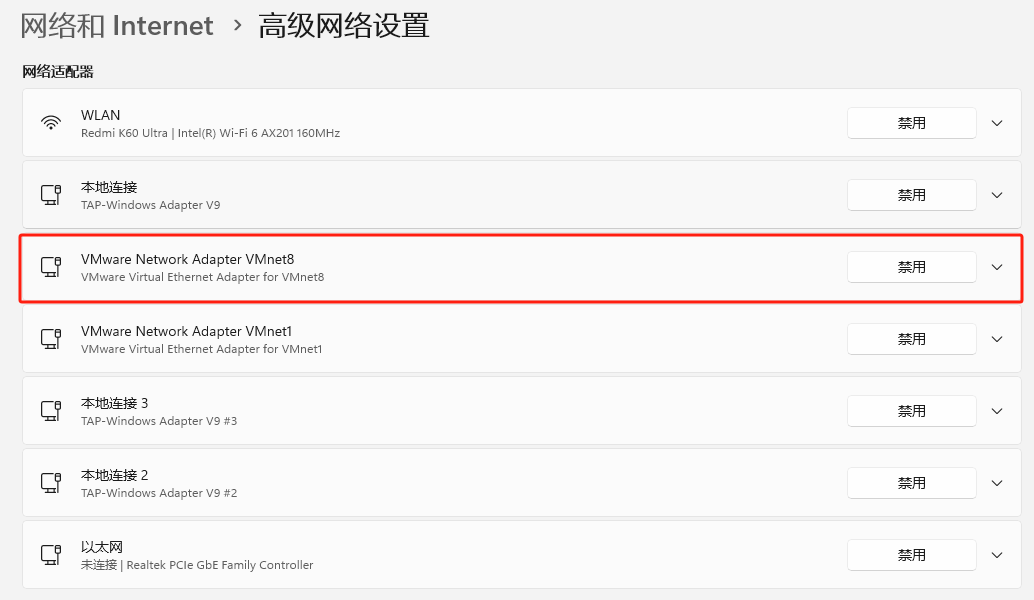
VMware虚拟机中CentOS7自定义ip地址并且固定ip
配置固定ip(虚拟机) 前提:虚拟机网络配置成,自定义网络并选择VMnet8(NAT 模式) 操作(如下图):点击虚拟机–》设置–》–》硬件–》网络适配器–》自定义:特定虚拟网络–》选择:VMnet8(NAT 模式) 虚拟机网络设置 需要记…...

CCS(Code Composer Studio 10.4.0)编译软件中文乱码怎么解决
如果是所有文件都出现了中文乱码这时建议直接在窗口首选项中修改:选择"Window" -> "Preferences",找到"General" -> "Workspace",将"Text file encoding"选项设置为"Other&quo…...

AI Agent与Agentic AI:原理、应用、挑战与未来展望
文章目录 一、引言二、AI Agent与Agentic AI的兴起2.1 技术契机与生态成熟2.2 Agent的定义与特征2.3 Agent的发展历程 三、AI Agent的核心技术栈解密3.1 感知模块代码示例:使用Python和OpenCV进行图像识别 3.2 认知与决策模块代码示例:使用OpenAI GPT-3进…...
以下是对华为 HarmonyOS NETX 5属性动画(ArkTS)文档的结构化整理,通过层级标题、表格和代码块提升可读性:
一、属性动画概述NETX 作用:实现组件通用属性的渐变过渡效果,提升用户体验。支持属性:width、height、backgroundColor、opacity、scale、rotate、translate等。注意事项: 布局类属性(如宽高)变化时&#…...

JVM垃圾回收机制全解析
Java虚拟机(JVM)中的垃圾收集器(Garbage Collector,简称GC)是用于自动管理内存的机制。它负责识别和清除不再被程序使用的对象,从而释放内存空间,避免内存泄漏和内存溢出等问题。垃圾收集器在Ja…...
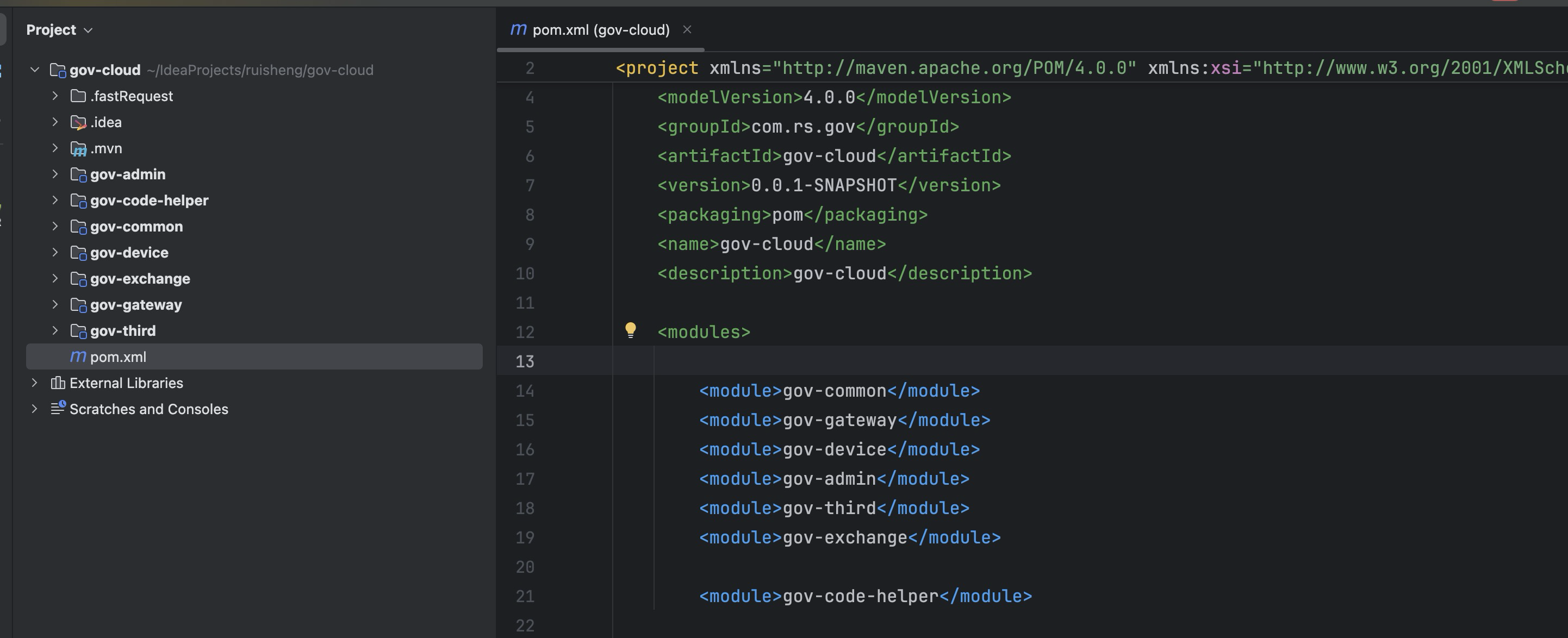
最新SpringBoot+SpringCloud+Nacos微服务框架分享
文章目录 前言一、服务规划二、架构核心1.cloud的pom2.gateway的异常handler3.gateway的filter4、admin的pom5、admin的登录核心 三、code-helper分享总结 前言 最近有个活蛮赶的,根据Excel列的需求预估的工时直接打骨折,不要问我为什么,主要…...
:滤镜命令)
ffmpeg(四):滤镜命令
FFmpeg 的滤镜命令是用于音视频处理中的强大工具,可以完成剪裁、缩放、加水印、调色、合成、旋转、模糊、叠加字幕等复杂的操作。其核心语法格式一般如下: ffmpeg -i input.mp4 -vf "滤镜参数" output.mp4或者带音频滤镜: ffmpeg…...
)
相机Camera日志分析之三十一:高通Camx HAL十种流程基础分析关键字汇总(后续持续更新中)
【关注我,后续持续新增专题博文,谢谢!!!】 上一篇我们讲了:有对最普通的场景进行各个日志注释讲解,但相机场景太多,日志差异也巨大。后面将展示各种场景下的日志。 通过notepad++打开场景下的日志,通过下列分类关键字搜索,即可清晰的分析不同场景的相机运行流程差异…...

今日学习:Spring线程池|并发修改异常|链路丢失|登录续期|VIP过期策略|数值类缓存
文章目录 优雅版线程池ThreadPoolTaskExecutor和ThreadPoolTaskExecutor的装饰器并发修改异常并发修改异常简介实现机制设计原因及意义 使用线程池造成的链路丢失问题线程池导致的链路丢失问题发生原因 常见解决方法更好的解决方法设计精妙之处 登录续期登录续期常见实现方式特…...
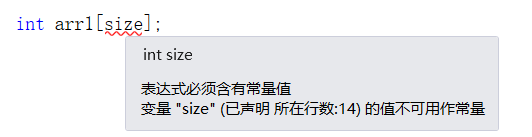
C++使用 new 来创建动态数组
问题: 不能使用变量定义数组大小 原因: 这是因为数组在内存中是连续存储的,编译器需要在编译阶段就确定数组的大小,以便正确地分配内存空间。如果允许使用变量来定义数组的大小,那么编译器就无法在编译时确定数组的大…...

NPOI操作EXCEL文件 ——CAD C# 二次开发
缺点:dll.版本容易加载错误。CAD加载插件时,没有加载所有类库。插件运行过程中用到某个类库,会从CAD的安装目录找,找不到就报错了。 【方案2】让CAD在加载过程中把类库加载到内存 【方案3】是发现缺少了哪个库,就用插件程序加载进…...
FFmpeg:Windows系统小白安装及其使用
一、安装 1.访问官网 Download FFmpeg 2.点击版本目录 3.选择版本点击安装 注意这里选择的是【release buids】,注意左上角标题 例如我安装在目录 F:\FFmpeg 4.解压 5.添加环境变量 把你解压后的bin目录(即exe所在文件夹)加入系统变量…...