STM32高级运动控制系统教程
目录
- 引言
- 环境准备
- 高级运动控制系统基础
- 代码实现:实现高级运动控制系统 4.1 传感器数据采集模块 4.2 数据处理与运动控制模块 4.3 通信与网络系统实现 4.4 用户界面与数据可视化
- 应用场景:运动控制与优化
- 问题解决方案与优化
- 收尾与总结
1. 引言
高级运动控制系统通过STM32嵌入式系统结合各种传感器、执行器和通信模块,实现对运动设备的实时监控、自动控制和数据传输。本文将详细介绍如何在STM32系统中实现一个高级运动控制系统,包括环境准备、系统架构、代码实现、应用场景及问题解决方案和优化方法。
2. 环境准备
硬件准备
- 开发板:STM32F4系列或STM32H7系列开发板
- 调试器:ST-LINK V2或板载调试器
- 传感器:如加速度计、陀螺仪、位置传感器等
- 执行器:如电机驱动器、伺服电机等
- 通信模块:如Wi-Fi模块、蓝牙模块
- 显示屏:如OLED显示屏
- 按键或旋钮:用于用户输入和设置
- 电源:电池或电源适配器
软件准备
- 集成开发环境(IDE):STM32CubeIDE或Keil MDK
- 调试工具:STM32 ST-LINK Utility或GDB
- 库和中间件:STM32 HAL库和FreeRTOS
安装步骤
- 下载并安装STM32CubeMX
- 下载并安装STM32CubeIDE
- 配置STM32CubeMX项目并生成STM32CubeIDE项目
- 安装必要的库和驱动程序
3. 高级运动控制系统基础
控制系统架构
高级运动控制系统由以下部分组成:
- 传感器数据采集模块:用于采集运动设备的姿态、速度、位置等数据
- 数据处理与运动控制模块:对采集的数据进行处理和分析,生成控制信号
- 通信与网络系统:实现运动数据与服务器或其他设备的通信
- 显示系统:用于显示运动状态和数据
- 用户输入系统:通过按键或旋钮进行设置和调整
功能描述
通过各种传感器采集运动设备的数据,并实时显示在OLED显示屏上。系统通过数据处理和通信模块,实现对运动设备的实时监控和自动控制。用户可以通过按键或旋钮进行设置,并通过显示屏查看当前状态。
4. 代码实现:实现高级运动控制系统
4.1 传感器数据采集模块
配置加速度计和陀螺仪(IMU)
使用STM32CubeMX配置I2C接口:
- 打开STM32CubeMX,选择您的STM32开发板型号。
- 在图形化界面中,找到需要配置的I2C引脚,设置为I2C模式。
- 生成代码并导入到STM32CubeIDE中。
代码实现:
#include "stm32f4xx_hal.h"
#include "i2c.h"
#include "mpu6050.h"I2C_HandleTypeDef hi2c1;void I2C1_Init(void) {hi2c1.Instance = I2C1;hi2c1.Init.ClockSpeed = 100000;hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;hi2c1.Init.OwnAddress1 = 0;hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;hi2c1.Init.OwnAddress2 = 0;hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;HAL_I2C_Init(&hi2c1);
}void Read_IMU_Data(float* ax, float* ay, float* az, float* gx, float* gy, float* gz) {MPU6050_ReadAll(ax, ay, az, gx, gy, gz);
}int main(void) {HAL_Init();SystemClock_Config();I2C1_Init();MPU6050_Init();float ax, ay, az, gx, gy, gz;while (1) {Read_IMU_Data(&ax, &ay, &az, &gx, &gy, &gz);HAL_Delay(100);}
}
配置位置传感器
使用STM32CubeMX配置SPI接口:
- 打打开STM32CubeMX,选择您的STM32开发板型号。
- 在图形化界面中,找到需要配置的SPI引脚,设置为SPI模式。
- 生成代码并导入到STM32CubeIDE中。
代码实现:
#include "stm32f4xx_hal.h"
#include "spi.h"
#include "position_sensor.h"SPI_HandleTypeDef hspi1;void SPI1_Init(void) {hspi1.Instance = SPI1;hspi1.Init.Mode = SPI_MODE_MASTER;hspi1.Init.Direction = SPI_DIRECTION_2LINES;hspi1.Init.DataSize = SPI_DATASIZE_8BIT;hspi1.Init.CLKPolarity = SPI_POLARITY_LOW;hspi1.Init.CLKPhase = SPI_PHASE_1EDGE;hspi1.Init.NSS = SPI_NSS_SOFT;hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_16;hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB;hspi1.Init.TIMode = SPI_TIMODE_DISABLE;hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;hspi1.Init.CRCPolynomial = 10;HAL_SPI_Init(&hspi1);
}void Read_Position_Data(float* position) {PositionSensor_ReadAll(position);
}int main(void) {HAL_Init();SystemClock_Config();SPI1_Init();PositionSensor_Init();float position;while (1) {Read_Position_Data(&position);HAL_Delay(100);}
}
4.2 数据处理与运动控制模块
数据处理模块将传感器数据转换为可用于运动控制的数据,并进行必要的计算和分析。
运动控制算法
实现一个简单的PID控制算法,根据传感器数据生成控制信号:
typedef struct {float kp;float ki;float kd;float previous_error;float integral;
} PID_Controller;PID_Controller position_pid = {1.0, 0.1, 0.01, 0, 0};float PID_Compute(PID_Controller* pid, float setpoint, float measured) {float error = setpoint - measured;pid->integral += error;float derivative = error - pid->previous_error;pid->previous_error = error;return pid->kp * error + pid->ki * pid->integral + pid->kd * derivative;
}void Control_Motor(float control_signal) {// 具体电机控制代码
}void Process_Motion_Control(float position) {float control_signal = PID_Compute(&position_pid, 0, position);Control_Motor(control_signal);
}int main(void) {HAL_Init();SystemClock_Config();I2C1_Init();SPI1_Init();MPU6050_Init();PositionSensor_Init();float ax, ay, az, gx, gy, gz;float position;while (1) {Read_IMU_Data(&ax, &ay, &az, &gx, &gy, &gz);Read_Position_Data(&position);Process_Motion_Control(position);HAL_Delay(10);}
}
4.3 通信与网络系统实现
配置无线通信模块
使用STM32CubeMX配置SPI接口:
- 打打开STM32CubeMX,选择您的STM32开发板型号。
- 在图形化界面中,找到需要配置的SPI引脚,设置为SPI模式。
- 生成代码并导入到STM32CubeIDE中。
代码实现:
#include "stm32f4xx_hal.h"
#include "spi.h"
#include "rf_module.h"SPI_HandleTypeDef hspi2;void SPI2_Init(void) {hspi2.Instance = SPI2;hspi2.Init.Mode = SPI_MODE_MASTER;hspi2.Init.Direction = SPI_DIRECTION_2LINES;hspi2.Init.DataSize = SPI_DATASIZE_8BIT;hspi2.Init.CLKPolarity = SPI_POLARITY_LOW;hspi2.Init.CLKPhase = SPI_PHASE_1EDGE;hspi2.Init.NSS = SPI_NSS_SOFT;hspi2.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_16;hspi2.Init.FirstBit = SPI_FIRSTBIT_MSB;hspi2.Init.TIMode = SPI_TIMODE_DISABLE;hspi2.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;hspi2.Init.CRCPolynomial = 10;HAL_SPI_Init(&hspi2);
}void Transmit_Motion_Data(float position, float ax, float ay, float az, float gx, float gy, float gz) {char buffer[256];sprintf(buffer, "Pos: %.2f, Ax: %.2f, Ay: %.2f, Az: %.2f, Gx: %.2f, Gy: %.2f, Gz: %.2f",position, ax, ay, az, gx, gy, gz);RF_Transmit(buffer, strlen(buffer));
}int main(void) {HAL_Init();SystemClock_Config();SPI2_Init();RF_Init();float ax, ay, az, gx, gy, gz;float position;while (1) {Read_IMU_Data(&ax, &ay, &az, &gx, &gy, &gz);Read_Position_Data(&position);Transmit_Motion_Data(position, ax, ay, az, gx, gy, gz);HAL_Delay(1000);}
}
4.4 用户界面与数据可视化
配置OLED显示屏
使用STM32CubeMX配置I2C接口:
- 打打开STM32CubeMX,选择您的STM32开发板型号。
- 在图形化界面中,找到需要配置的I2C引脚,设置为I2C模式。
- 生成代码并导入到STM32CubeIDE中。
代码实现:
首先,初始化OLED显示屏:
#include "stm32f4xx_hal.h"
#include "i2c.h"
#include "oled.h"void Display_Init(void) {OLED_Init();
}
然后实现数据展示函数,将运动数据展示在OLED屏幕上:
void Display_Motion_Data(float position, float ax, float ay, float az, float gx, float gy, float gz) {char buffer[32];sprintf(buffer, "Pos: %.2f", position);OLED_ShowString(0, 0, buffer);sprintf(buffer, "Ax: %.2f", ax);OLED_ShowString(0, 1, buffer);sprintf(buffer, "Ay: %.2f", ay);OLED_ShowString(0, 2, buffer);sprintf(buffer, "Az: %.2f", az);OLED_ShowString(0, 3, buffer);sprintf(buffer, "Gx: %.2f", gx);OLED_ShowString(0, 4, buffer);sprintf(buffer, "Gy: %.2f", gy);OLED_ShowString(0, 5, buffer);sprintf(buffer, "Gz: %.2f", gz);OLED_ShowString(0, 6, buffer);
}int main(void) {HAL_Init();SystemClock_Config();I2C1_Init();Display_Init();SPI2_Init();UART2_Init();GPIOB_Init();ADC_Init();ADC2_Init();I2C1_Init();MPU6050_Init();PositionSensor_Init();RF_Init();float ax, ay, az, gx, gy, gz;float position;while (1) {Read_IMU_Data(&ax, &ay, &az, &gx, &gy, &gz);Read_Position_Data(&position);// 显示运动数据Display_Motion_Data(position, ax, ay, az, gx, gy, gz);HAL_Delay(1000);}
}
5. 应用场景:运动控制与优化
机器人控制
高级运动控制系统可以用于机器人控制,通过实时采集和分析运动数据,实现机器人的精准控制和自主导航。
工业自动化
高级运动控制系统可以用于工业自动化,通过监测和控制运动设备,提高生产效率和产品质量。
无人驾驶
高级运动控制系统可以用于无人驾驶,通过实时采集和分析车辆的运动数据,实现无人驾驶车辆的精准控制和安全驾驶。
体育训练
高级运动控制系统可以用于体育训练,通过监测和分析运动员的动作数据,优化训练方案,提高运动表现。
⬇帮大家整理了单片机的资料
包括stm32的项目合集【源码+开发文档】
点击下方蓝字即可领取,感谢支持!⬇
点击领取更多嵌入式详细资料
问题讨论,stm32的资料领取可以私信!
6. 问题解决方案与优化
常见问题及解决方案
传感器数据不准确
确保传感器与STM32的连接稳定,定期校准传感器以获取准确数据。
解决方案:检查传感器与STM32之间的连接是否牢固,必要时重新焊接或更换连接线。同时,定期对传感器进行校准,确保数据准确。
运动控制不稳定
优化控制算法和硬件配置,减少运动控制的不稳定性,提高系统反应速度。
解决方案:优化控制算法,调整参数,减少振荡和超调。使用高精度传感器,提高数据采集的精度和稳定性。选择更高效的处理器,提高数据处理的响应速度。
数据传输失败
确保通信模块与STM32的连接稳定,优化通信协议,提高数据传输的可靠性。
解决方案:检查通信模块与STM32之间的连接是否牢固,必要时重新焊接或更换连接线。优化通信协议,减少数据传输的延迟和丢包率。选择更稳定的通信模块,提升数据传输的可靠性。
显示屏显示异常
检查I2C通信线路,确保显示屏与MCU之间的通信正常,避免由于线路问题导致的显示异常。
解决方案:检查I2C引脚的连接是否正确,确保电源供电稳定。使用示波器检测I2C总线信号,确认通信是否正常。如有必要,更换显示屏或MCU。
优化建议
数据集成与分析
集成更多类型的传感器数据,使用数据分析技术进行运动状态的预测和优化。
建议:增加更多运动监测传感器,如压力传感器、温度传感器等。使用云端平台进行数据分析和存储,提供更全面的运动监测和管理服务。
用户交互优化
改进用户界面设计,提供更直观的数据展示和更简洁的操作界面,增强用户体验。
建议:使用高分辨率彩色显示屏,提供更丰富的视觉体验。设计简洁易懂的用户界面,让用户更容易操作。提供图形化的数据展示,如实时运动参数图表、历史记录等。
智能化控制提升
增加智能决策支持系统,根据历史数据和实时数据自动调整运动控制策略,实现更高效的运动控制。
建议:使用数据分析技术分析运动数据,提供个性化的控制建议。结合历史数据,预测可能的问题和需求,提前优化控制策略。
7. 收尾与总结
本教程详细介绍了如何在STM32嵌入式系统中实现高级运动控制系统,从硬件选择、软件实现到系统配置和应用场景都进行了全面的阐述。通过合理的技术选择和系统设计,可以构建一个高效且功能强大的高级运动控制系统。
在未来的发展中,高级运动控制系统可以进一步结合人工智能和大数据分析技术,提升系统的智能化程度,为运动设备的监测和控制提供更强大的技术支持。希望本教程能够为读者提供有价值的参考和指导,助力高级运动控制系统的开发与实现。
通过本教程,读者应该能够了解高级运动控制系统的基本组成部分,学会如何配置和使用各种传感器,如何处理和传输数据,如何实现用户界面和数据可视化,以及如何优化和解决常见问题。希望本教程能够帮助读者成功实现自己的高级运动控制系统项目。
相关文章:

STM32高级运动控制系统教程
目录 引言环境准备高级运动控制系统基础代码实现:实现高级运动控制系统 4.1 传感器数据采集模块 4.2 数据处理与运动控制模块 4.3 通信与网络系统实现 4.4 用户界面与数据可视化应用场景:运动控制与优化问题解决方案与优化收尾与总结 1. 引言 高级运动…...
链式栈,队列与树形结构
链式栈 链式存储的栈 实现方式:可以使用单向链表完成 对单向链表进行头插(入栈)、头删(出栈),此时链表的头部就是链栈的栈顶,链表的尾部,就是链栈的栈底 队列 概念 队列&#…...

Android历史版本与APK文件结构
前言 在移动设备日益普及的今天,Android系统已经成为全球最流行的移动操作系统。作为Android开发者或逆向工程师,了解Android系统的演进历史以及APK文件的基本结构是非常重要的。本文将详细介绍Android历史版本的演变以及APK的基本结构。 一、Android历…...

文件解析漏洞集合
IIS解析漏洞 IIS6 目录解析 在网站下建立文件夹的名字为.asp/.asa 的文件夹,其目录内的任何扩展名的文件都被IIS当作asp 文件来解析并执行。 这里显示的是 1.asp下的1.jpg,按照道理来说里面的文件是一个图片,但是访问的话,会出…...

如何利用大语言模型进行半监督医学图像分割?这篇文章给出了答案
PS:写在前面,近期感谢很多小伙伴关注到我写的论文解读,我也会持续更新吖~同时希望大家多多支持本人的公主号~ 想了解更多医学图像论文资料请移步公主👸号哦~~~后期将持续更新!! 关注我,让我们一…...

库文件的制作和makefile文件操作基础实现
库文件包括静态库和动态库: 制作动态库命令如下: gcc -fPIC -shared xxx.c xxx.c -o libxxx.so xxx表示文件名 最后会生成一个libxxx.so文件 。这个so文件就是库文件。(若是用到了自己写的.c和.h文件,需要在同一目录下哦&…...

【Linux】进程创建进程终止进程等待
目录 一、进程创建1.1 写时拷贝1.2 frok的常规用法1.3 fork调用失败的原因 二、进程终止2.1 进程退出码2.2 进程退出方式2.2.1 exit函数的使用2.2.2 _exit函数的使用2.2.3 exit函数与_exit函数的区别 2.3 进程信号 三、进程等待3.1 进程等待的必要性3.2 进程等待的方式3.2.1 wa…...

编程的进阶和并发之路
编程的进阶和并发之路 博主在这谈并发,是因为单进程的资源是全局共享,函数作为局部空间来分担分布式计算的过程,掌握并发等于熟悉流式计算和程序执行的通量快速到达结束点。在大数据初期阶段,经验开发缺乏很多模拟数据࿰…...

文件系统 --- 文件结构体,文件fd以及文件描述符表
序言 在编程的世界里,文件操作是不可或缺的一部分。无论是数据的持久化存储、日志记录,还是简单的文本编辑,文件都扮演着至关重要的角色。然而,当我们通过编程语言如 C、Java 等轻松地进行文件读写时,背后隐藏的复杂机…...

【第三节】python中的函数
目录 一、函数的定义 二、函数的调用 三、函数的参数 3.1 可变与不可变对象 3.2 函数参数传递 3.3 参数类型 四、匿名函数 五、函数的return语句 六、作用域 七、python的模块化 八、 main 函数 一、函数的定义 函数是经过精心组织、可重复使用的代码片段࿰…...

“论云原生架构及其应用”写作框架软考高级论文系统架构设计师论文
论文真题 近年来,随着数字化转型不断深入,科技创新与业务发展不断融合,各行各业正在从大工业时代的固化范式进化成面向创新型组织与灵活型业务的崭新模式。在这一背景下,以容器和微服务架构为代表的云原生技术作为云计算服务的新…...
深度剖析Google黑科技RB-Modulation:告别繁琐训练,拥抱无限创意生成和风格迁移!
给定单个参考图像,RB-Modulation提供了一个无需训练的即插即用解决方案,用于(a)风格化和(b)具有各种提示的内容样式组合,同时保持样本多样性和提示对齐。例如,给定参考样式图像(例如“熔化的黄金3d渲染样式”)和内容图像(例如(a)“狗”),RB-Modulation方法可以坚持所需的提…...

react native 和 flutter 区别
React Native 和 Flutter 都是用于构建跨平台移动应用的优秀框架,各有其优点和适用场景。 1. React Native 1.1 优点 | 基于 JavaScript 生态:对于熟悉 JavaScript 和 React 的开发者来说,学习成本相对较低,能够利用大量现有的 …...

ITSS服务经理/ITSS服务工程师,招投标需要准备吗?
信息技术服务标准(ITSS)是中国首套完整的信息技术服务标准体系,全面规定了IT服务产品及其组成要素的标准化实施,旨在提供可信赖的IT服务。 在国际竞争日益激烈的背景下,推动国内标准的国际化已成为广泛共识࿰…...

eleven接口、多态
能够写出接口的定义格式 public interface 接口名 { public static final 数据类型 名称 数据值; //抽象方法: 必须使用实现类对象调用 void method(); //默认方法: 必须使用实现类对象调用 public default void show() {...} …...
重磅惊喜!OpenAI突然上线GPT-4o超长输出模型!「Her」高级语音模式已开放测试
在最近的大模型战争中,OpenAI似乎很难维持霸主地位。虽然没有具体的数据统计,但Claude3.5出现后,只是看网友们的评论,就能感觉到OpenAI订阅用户的流失: Claude3.5比GPT-4o好用,为什么我们不去订阅Claude呢&…...

解决问题 CUDA error: CUBLAS_STATUS_INVALID_VALUE when calling `cublasGemmEx
遇到问题如下: Traceback (most recent call last):File "run_warmup_a.py", line 431, in <module>main()File "run_warmup_a.py", line 142, in mainreturn main_worker(args, logger)File "run_warmup_a.py", line 207, in…...
【Python实战因果推断】67_图因果模型2
目录 Are Consultants Worth It? Crash Course in Graphical Models Chains Are Consultants Worth It? 为了展示有向无环图(DAG)的力量,让我们考虑一个更有趣但处理因素并未随机化的情况。假设你是某公司的经理,正在考虑是否聘请顶级咨询顾问。你…...

RK3588+MIPI+GMSL+AI摄像机:自动车载4/8通道GMSL采集/边缘计算盒解决方案
RK3588作为目前市面能买到的最强国产SOC,有强大的硬件配置。在智能汽车飞速发展,对图像数据矿场要求越来越多的环境下,如何高效采集数据,或者运行AI应用,成为刚需。 推出的4/8通道GMSL采集/边缘计算盒产品满足这些需求…...

智云-一个抓取web流量的轻量级蜜罐
智云-一个抓取web流量的轻量级蜜罐 安装环境要求 apache php7.4 mysql8 github地址 https://github.com/xiaoxiaoranxxx/POT-ZHIYUN 系统演示...

【C语言练习】080. 使用C语言实现简单的数据库操作
080. 使用C语言实现简单的数据库操作 080. 使用C语言实现简单的数据库操作使用原生APIODBC接口第三方库ORM框架文件模拟1. 安装SQLite2. 示例代码:使用SQLite创建数据库、表和插入数据3. 编译和运行4. 示例运行输出:5. 注意事项6. 总结080. 使用C语言实现简单的数据库操作 在…...

鱼香ros docker配置镜像报错:https://registry-1.docker.io/v2/
使用鱼香ros一件安装docker时的https://registry-1.docker.io/v2/问题 一键安装指令 wget http://fishros.com/install -O fishros && . fishros出现问题:docker pull 失败 网络不同,需要使用镜像源 按照如下步骤操作 sudo vi /etc/docker/dae…...
IT供电系统绝缘监测及故障定位解决方案
随着新能源的快速发展,光伏电站、储能系统及充电设备已广泛应用于现代能源网络。在光伏领域,IT供电系统凭借其持续供电性好、安全性高等优势成为光伏首选,但在长期运行中,例如老化、潮湿、隐裂、机械损伤等问题会影响光伏板绝缘层…...
【JavaWeb】Docker项目部署
引言 之前学习了Linux操作系统的常见命令,在Linux上安装软件,以及如何在Linux上部署一个单体项目,大多数同学都会有相同的感受,那就是麻烦。 核心体现在三点: 命令太多了,记不住 软件安装包名字复杂&…...
全志A40i android7.1 调试信息打印串口由uart0改为uart3
一,概述 1. 目的 将调试信息打印串口由uart0改为uart3。 2. 版本信息 Uboot版本:2014.07; Kernel版本:Linux-3.10; 二,Uboot 1. sys_config.fex改动 使能uart3(TX:PH00 RX:PH01),并让boo…...
-HIve数据分析)
大数据学习(132)-HIve数据分析
🍋🍋大数据学习🍋🍋 🔥系列专栏: 👑哲学语录: 用力所能及,改变世界。 💖如果觉得博主的文章还不错的话,请点赞👍收藏⭐️留言Ǵ…...

laravel8+vue3.0+element-plus搭建方法
创建 laravel8 项目 composer create-project --prefer-dist laravel/laravel laravel8 8.* 安装 laravel/ui composer require laravel/ui 修改 package.json 文件 "devDependencies": {"vue/compiler-sfc": "^3.0.7","axios": …...
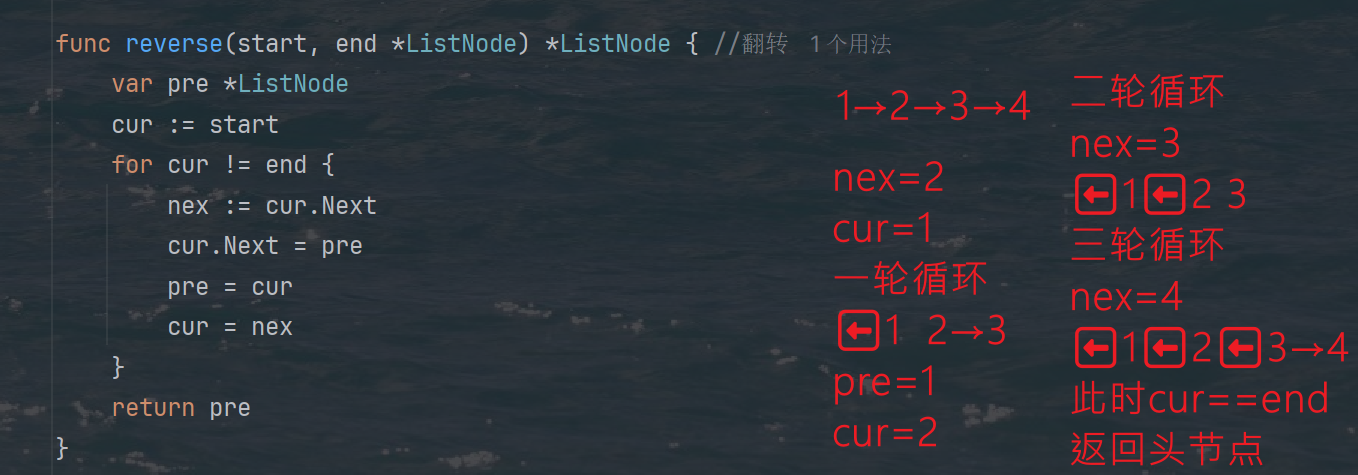
力扣热题100 k个一组反转链表题解
题目: 代码: func reverseKGroup(head *ListNode, k int) *ListNode {cur : headfor i : 0; i < k; i {if cur nil {return head}cur cur.Next}newHead : reverse(head, cur)head.Next reverseKGroup(cur, k)return newHead }func reverse(start, end *ListNode) *ListN…...
STM32---外部32.768K晶振(LSE)无法起振问题
晶振是否起振主要就检查两个1、晶振与MCU是否兼容;2、晶振的负载电容是否匹配 目录 一、判断晶振与MCU是否兼容 二、判断负载电容是否匹配 1. 晶振负载电容(CL)与匹配电容(CL1、CL2)的关系 2. 如何选择 CL1 和 CL…...
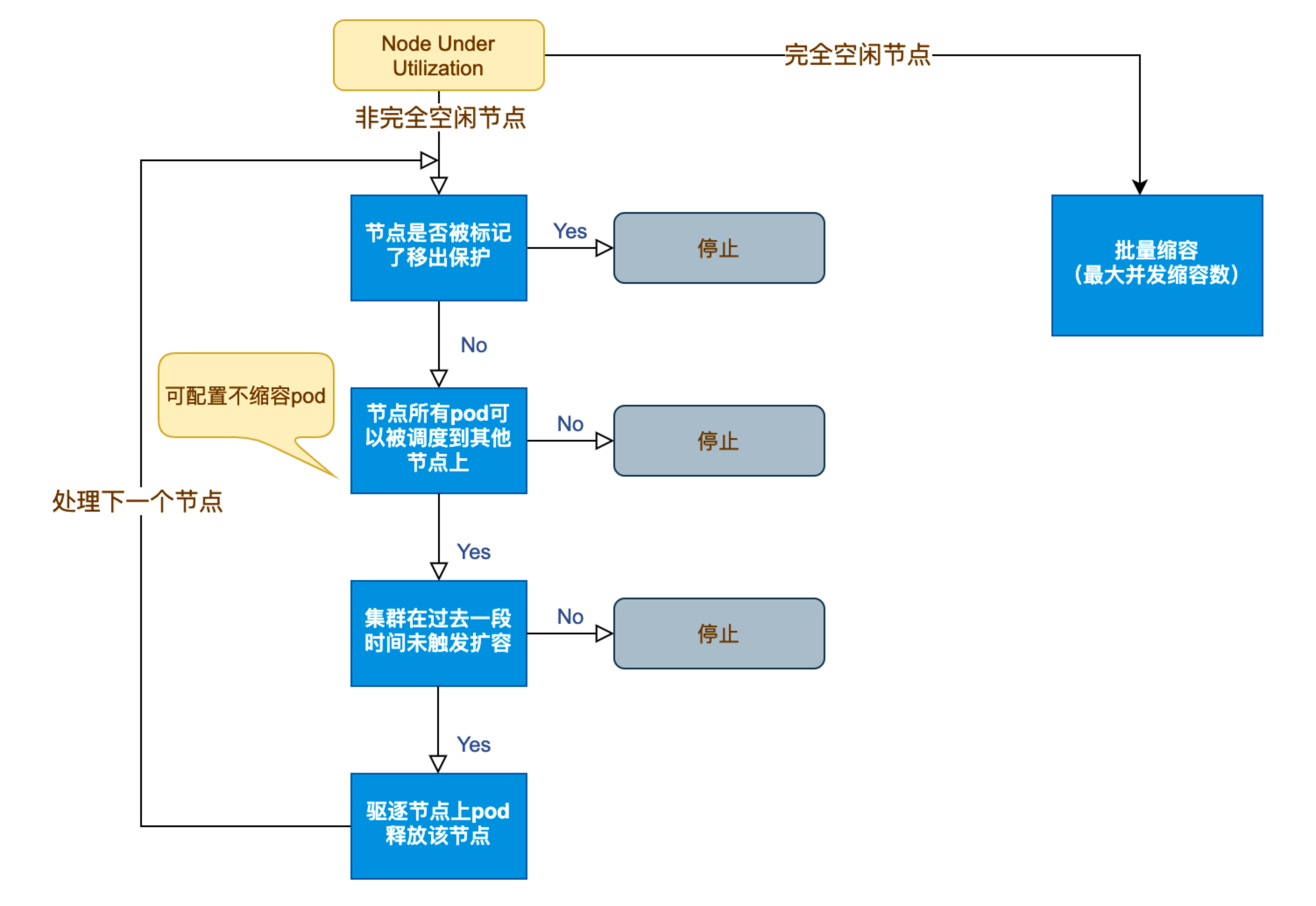
Kubernetes 节点自动伸缩(Cluster Autoscaler)原理与实践
在 Kubernetes 集群中,如何在保障应用高可用的同时有效地管理资源,一直是运维人员和开发者关注的重点。随着微服务架构的普及,集群内各个服务的负载波动日趋明显,传统的手动扩缩容方式已无法满足实时性和弹性需求。 Cluster Auto…...